1.本发明涉及一种噪声控制多目标跟踪方法,属于图像处理技术领域。
背景技术:
2.随着人工智能技术的飞速发展,基于计算机视觉技术的智能监控系统、自动驾驶领域较以往取得了重大的突破,进一步减少了人力资源的浪费,提高了安防和交通领域的安全性。视觉多目标跟踪技术是这些领域中的关键基础性技术之一,视觉目标跟踪算法的准确鲁棒性对于进一步提升高层智能应用的安全有效性具有重要意义。多目标跟踪任务需要保证跟踪的实时性与准确性,传统的基于检测器的跟踪算法过于依赖检测器,外界环境的遮挡、光照、形变等因素对检测造成的轻微误差都会极大影响前后帧间的数据关联,从而导致跟踪目标丢失进而使跟踪轨迹中断。
技术实现要素:
3.本发明要解决的技术问题是提供一种噪声控制多目标跟踪方法,提高在小目标跟踪和复杂环境跟踪场景下的跟踪精度,从而解决上述问题。
4.本发明的技术方案是:一种噪声控制多目标跟踪方法,通过将高斯函数与检测结果置信度结合获取平滑自适应观测噪声矩阵,进一步得到平滑增益,获取目标的运动信息,具体步骤为:
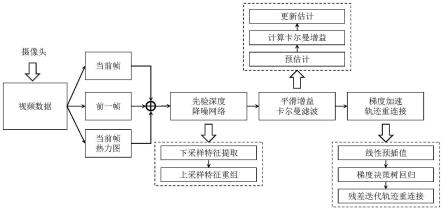
5.step1:通过摄像头获取视频数据。
6.step2:将跟踪数据的当前帧、前一帧以及当前帧热力图进行特征提取与加法融合,通过引入先验降噪模块去除融合冗余噪声。
7.step3:对融合结果进行特征提取,获得不同感受野的热力图融合特征,计算融合结果中热力图中心点的梯度,获取目标中心点进行目标检测。
8.step4:对检测结果进行平滑增益卡尔曼滤波,通过将高斯函数与检测结果置信度结合获取平滑自适应观测噪声矩阵,进一步得到平滑增益,获取目标的运动信息。
9.step5:结合运动信息对帧间目标进行数据关联,获得目标运动轨迹。
10.step6:设计梯度加速轨迹重连接模块,对碎片轨迹与中断轨迹进行轨迹重连接,获得精确的跟踪结果。
11.所述step2具体为:
12.step2.1:将跟踪数据的当前帧、前一帧以及当前帧热力图进行特征提取与加法融合。
13.step2.2:将融合特征的c_256与c_128输入先验降噪模块中。
14.step2.3:通过无偏置的特征提取与特征重组去除融合特征的冗余噪声。
15.所述step4具体为:
16.step4.1:计算测量预拟合残差。
17.step4.2:通过将高斯函数与检测结果置信度结合获取平滑自适应观测噪声矩阵
sg_rk,其中高斯半径σ为3。
18.step4.3:计算预拟合残差协方差。
19.step4.4:基于通过高斯函数平滑后的自适应观测噪声矩阵计算卡尔曼增益矩阵,确保卡尔曼滤波增益的稳定性。
20.step4.5:更新系统估计值。
21.step4.6:计算更新后的估计协方差矩阵。
22.本发明与现有技术相比,首次引入先验降噪模块去除热力图融合冗余噪声;结合自适应观测噪声进行平滑突变噪声的卡尔曼滤波,稳定获取目标运动信息;设计梯度加速轨迹重连接模块,通过梯度加速决策树算法自适应重连接碎片轨迹。
23.本发明基于无锚框的多目标跟踪算法早期特征融合导致的语义信息冗余问题;传统方法仅能基于常数观测噪声的卡尔曼滤波计算运动信息,无法平稳结合跟踪系统信息进一步获取运动信息的问题;轨迹重连接缺少考虑轨迹真值的趋势,重连接结果偏差大的问题。
24.本发明的有益效果是:本发明是控制跟踪各阶段噪声的多目标跟踪方法。本发明与现有技术相比,本方法解决了以下三个问题:基于无锚框的多目标跟踪算法早期特征融合导致的语义信息冗余问题;传统方法仅能基于常数观测噪声的卡尔曼滤波计算运动信息,无法平稳结合跟踪系统信息进一步获取运动信息的问题;轨迹重连接缺少考虑轨迹真值的趋势,重连接结果偏差大的问题。本方法不仅提高了小目标跟踪和复杂环境跟踪场景下跟踪精度,而且提升了数据关联中运动信息的获取,缓解了轨迹漂移的问题。
附图说明
25.图1是本发明的流程图。
26.图2是本发明的多目标跟踪的整体网络图。
27.图3是本发明所设计的热力图特征先验降噪的原理说明图。
28.图4是本发明所设计的平滑增益卡尔曼滤波的原理说明图。
29.图5是本发明的梯度加速轨迹重连接的原理说明图。
具体实施方式
30.下面结合附图和具体实施方式,对本发明作进一步说明。
31.实施例1:如图1所示,一种噪声控制多目标跟踪方法,具体步骤如下:
32.step1:读取摄像头视频信息。
33.step2:将跟踪数据的当前帧、前一帧以及当前帧热力图进行特征提取与加法融合,通过引入先验降噪模块去除融合冗余噪声。
34.step2.1:将跟踪数据的当前帧、前一帧以及当前帧热力图进行特征提取与加法融合;
35.通过卷积、正则化与激活函数对当前帧、前一帧以及当前帧热力图进行初步的特征提取,三者在提取特征时是共享权重的。三者进行完加法融合后,融合特征的尺寸为:544
×
960
×
16。
36.step2.2:将融合特征的c_256与c_128输入先验降噪模块中;
37.如图2所示,对544
×
960
×
16的融合特征进行进一步特征提取,获得16至512通道的不同感受野的特征。为了实现精度与速度的权衡,选择将融合特征的c_256与c_128输入先验降噪模块中。
38.step2.3:通过无偏置的特征提取与特征重组去除融合特征的冗余噪声;
39.如图3所示,先验降噪模块由四个尺度组成,每个尺度在2x2步幅卷积下变换和2x2反卷积上变换操作之间有一个身份跳转连接,从第一尺度到第四尺度每层的通道数分别为64、128、256和512。此外,为了保证模型的泛化性,模型中的步幅卷积和反卷积层中没有使用偏置。
40.step3:对融合结果进行特征提取,获得不同感受野的热力图融合特征,计算融合结果中热力图中心点的梯度,获取目标中心点进行目标检测;
41.step4:如图4所示,对检测结果进行平滑增益卡尔曼滤波,通过将高斯函数与检测结果置信度结合获取平滑自适应观测噪声矩阵,进一步得到平滑增益,获取目标的运动信息;
42.step4.1:计算测量预拟合残差;
[0043][0044]
其中,为预拟合残差,zk为原拟合残差,hk为观测模型,预测估计状态。
[0045]
step4.2:通过将高斯函数与检测结果置信度结合获取平滑自适应观测噪声矩阵sg_rk;
[0046][0047]
其中,ck检测模型测量置信度,高斯半径σ与标准高斯分布一样取1,期望μ为1,代表置信度分数与期望相差的概率,引入自适应观测噪声协方差。
[0048]
step4.3:计算预拟合残差协方差;
[0049][0050]
其中,p
k|k-1
为预测估计协方差。
[0051]
step4.4:基于通过高斯函数平滑后的自适应观测噪声矩阵计算卡尔曼增益矩阵,确保卡尔曼滤波增益的稳定性;
[0052][0053]
step4.5:更新系统估计值;
[0054][0055]
step4.6:计算更新后的估计协方差矩阵。
[0056]
p
k|k
=(i-k
khk
)p
k|k-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0057]
step5:结合运动信息对帧间目标进行数据关联,获得目标运动轨迹。设计梯度加速轨迹重连接模块,对碎片轨迹与中断轨迹进行轨迹重连接,获得精确的跟踪结果。
[0058]
如图5所示,受帧率和物体运动方向的影响,目标轨迹的真值是一条有方向的渐进折线。基于此,本发明的梯度提升轨迹重连接模块通过梯度提升决策树自适应地逼近残差减少方向的真实轨迹,实现了准确性和效率之间的良好折衷。
[0059]
本发明为第i个轨迹的梯度提升轨迹重连接模型如下:
[0060]
p
t
=gb(i)(t) ξ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0061]
其中,p
t
是第t帧的位置坐标变量,ξ~n(0,σ2)是高斯噪声。进行梯度提升轨迹重连接前,首先对中断轨迹进行线性插值,插值轨迹其中l为轨迹长度,这样保证了模块的高效。gb(i)(t)为梯度提升决策树回归,将轨迹输入见式(6)中,获得残差减少迭代递归的重连接轨迹。
[0062][0063][0064]
其中,γi是拟合决策树值,ri是终点领域,l是偏差损失函数.gb(i)(t)利用加法模型和前向分步算法实现向真实值的迭代优化过程,获得了重连接后的连续轨迹,并且保证了重连接轨迹与真实轨迹趋势的一致性。
[0065]
以上结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。