1.本技术涉及游戏技术领域,具体而言,涉及一种虚拟对象的命中检测方法、装置、电子设备及存储介质。
背景技术:
2.在许多游戏中,玩家控制虚拟对象可以释放范围性作用技能,当虚拟对象释放范围性作用技能后,需要检测其他虚拟对象是否被该技能命中,并对命中的虚拟对象产生伤害、眩晕或是回血等效果。
3.现有的命中检测方法中,一般采用逐帧进行的离散点检测方法,针对每帧数据,根据技能的技能范围在虚拟场景中的位置和虚拟场景中各虚拟对象的位置,判断虚拟对象是否在技能范围内,若虚拟对象在技能范围内就确定该虚拟对象被技能命中。但是在实际游戏中,常常存在虚拟对象释放技能的技能范围较小或虚拟对象在虚拟场景中的移动速度较快的情况,在上述情况下,使用逐帧进行的离散点检测方法进行虚拟对象的命中检测过程中容易出现漏检的情况,从而导致虚拟对象命中检测的效率较低。
技术实现要素:
4.有鉴于此,本技术的目的在于提供一种虚拟对象的命中检测方法、装置、电子设备及存储介质,能在虚拟对象的命中检测过程中减少漏检的情况,不仅能够提高虚拟对象命中检测的精度,还能够提高虚拟对象命中检测的效率。
5.第一方面,本技术实施例提供了一种虚拟对象的命中检测方法,所述命中检测方法包括:
6.响应第一虚拟对象的技能释放请求,控制第一虚拟对象在虚拟场景中释放技能;
7.在第一虚拟对象释放技能的过程中,检测第二虚拟对象的至少部分运动路径是否与所述技能所对应的技能范围重合;
8.若重合,则确定所述第二虚拟对象被所述第一虚拟对象释放的技能命中。
9.第二方面,本技术实施例还提供了一种虚拟对象的命中检测装置,所述命中检测装置包括:
10.技能释放模块,用于响应第一虚拟对象的技能释放请求,控制第一虚拟对象在虚拟场景中释放技能;
11.路径检测模块,用于在第一虚拟对象释放技能的过程中,检测第二虚拟对象的至少部分运动路径是否与所述技能所对应的技能范围重合;
12.技能命中模块,用于若重合,则确定所述第二虚拟对象被所述第一虚拟对象释放的技能命中。
13.第三方面,本技术实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述处理器执行所述机器可读指令,以执行如上所述虚拟对象
的命中检测方法的步骤。
14.第四方面,本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上所述虚拟对象的命中检测方法的步骤。
15.本技术提供的技术方案至少具有如下有益技术效果:
16.本技术实施例能够响应第一虚拟对象的技能释放请求,控制第一虚拟对象在虚拟场景中释放技能;检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合;若重合,则确定第二虚拟对象被第一虚拟对象释放的技能命中。本技术实施例能够通过第二虚拟对象的至少部分运动路径与第一虚拟对象释放的技能所对应的技能范围重合的方式来判断第二虚拟对象被第一虚拟对象释放的技能命中,这样可以避免由于虚拟对象释放技能的技能范围较小或虚拟对象在虚拟场景中的移动速度较快所导致的漏检问题,不仅能够提高虚拟对象命中检测的精度,还能够提高虚拟对象命中检测的效率。
17.为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
18.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
19.图1为本技术实施例所提供的一种虚拟对象的命中检测方法的流程图;
20.图2为本技术实施例所提供的一种技能范围的界面示意图;
21.图3为本技术实施例所提供的另一种虚拟对象的命中检测方法的流程图;
22.图4为本技术实施例所提供的一种类图示意图;
23.图5为本技术实施例所提供的一种虚拟对象的命中检测装置的结构示意图;
24.图6为本技术实施例所提供的另一种虚拟对象的命中检测装置的结构示意图;
25.图7为本技术实施例所提供的一种电子设备的结构示意图。
具体实施方式
26.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的每个其他实施例,都属于本技术保护的范围。
27.在一可选的实施方式中,云交互系统下可以运行各种云应用,例如:云游戏。以云游戏为例,云游戏是指以云计算为基础的游戏方式。在云游戏的运行模式下,游戏程序的运行主体和游戏画面呈现主体是分离的,命中检测方法的储存与运行是在云游戏服务器上完
成的,客户端设备的作用用于数据的接收、发送以及游戏画面的呈现,举例而言,客户端设备可以是靠近用户侧的具有数据传输功能的显示设备,如,移动终端、电视机、计算机、掌上电脑等;但是进行命中检测的为云端的云游戏服务器。在进行游戏时,玩家操作客户端设备向云游戏服务器发送操作指令,云游戏服务器根据操作指令运行游戏,将游戏画面等数据进行编码压缩,通过网络返回客户端设备,最后,通过客户端设备进行解码并输出游戏画面。
28.在一可选的实施方式中,以游戏为例,本地终端设备存储有游戏程序并用于呈现游戏画面。本地终端设备用于通过图形用户界面与玩家进行交互,即,常规的通过电子设备下载安装游戏程序并运行。该本地终端设备将图形用户界面提供给玩家的方式可以包括多种,例如,可以渲染显示在终端的显示屏上,或者,通过全息投影提供给玩家。举例而言,本地终端设备可以包括显示屏和处理器,该显示屏用于呈现图形用户界面,该图形用户界面包括游戏画面,该处理器用于运行该游戏、生成图形用户界面以及控制图形用户界面在显示屏上的显示。
29.其次,对本技术可适用的应用场景进行介绍。本技术可应用于许多游戏中,如即时战略游戏(real time strategy games,rts)或者多人联机在线竞技游戏(multiplayer online battle arena,moba)中,玩家控制虚拟对象可以释放范围性作用技能,当虚拟对象释放范围性作用技能后,需要检测其他虚拟对象是否被该技能命中,并对命中的虚拟对象产生伤害、眩晕或是回血等效果。
30.现有的命中检测方法中,一般采用逐帧进行的离散点检测方法,针对每帧数据,根据技能的技能范围在虚拟场景中的位置和虚拟场景中各虚拟对象的位置,判断虚拟对象是否在技能范围内,若虚拟对象在技能范围内就确定该虚拟对象被技能命中。但是在实际游戏中,常常存在虚拟对象释放技能的技能范围较小或虚拟对象在虚拟场景中的移动速度较快的情况,在上述情况下,使用逐帧进行的离散点检测方法进行虚拟对象的命中检测过程中容易出现漏检的情况,从而导致虚拟对象命中检测的效率较低。
31.基于此,本技术实施例提供了一种虚拟对象的命中检测方法、装置、电子设备及存储介质,能在虚拟对象的命中检测过程中减少漏检的情况,不仅能够提高虚拟对象命中检测的精度,还能够提高虚拟对象命中检测的效率。
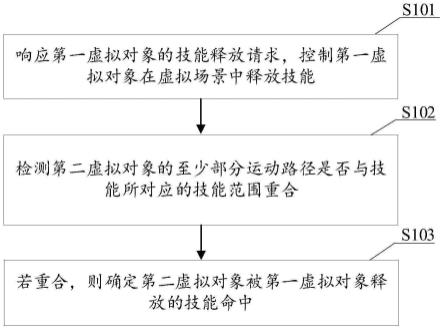
32.请参阅图1,图1为本技术实施例所提供的一种虚拟对象的命中检测方法的流程图。如图1中所示,本技术实施例提供的命中检测方法,包括:
33.s101、响应第一虚拟对象的技能释放请求,控制第一虚拟对象在虚拟场景中释放技能;
34.s102、检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合;
35.s103、若重合,则确定第二虚拟对象被第一虚拟对象释放的技能命中。
36.在步骤s101中,终端设备响应于针对图形用户界面上显示的技能控件的触控操作,向云服务器发送技能释放请求,云服务器响应第一虚拟对象的技能释放请求,控制第一虚拟对象在虚拟场景中释放技能。
37.这里,第一虚拟对象可以为登录该终端设备上的游戏客户端的账户在游戏中的虚拟对象,即,由该账户对应的玩家所操控的虚拟对象,但不排除第一虚拟对象是由其他应用
程序或者人工智能模块控制的可能性。虚拟场景是应用程序在终端或服务器上运行时显示(或提供)的虚拟场景,该虚拟场景是对真实世界的仿真环境,或者是半仿真半虚构的虚拟环境,或者是纯虚构的虚拟环境。可选地,虚拟场景是二维虚拟场景和三维虚拟场景中的任意一种,虚拟环境可以为天空、陆地、海洋等,其中,该陆地包括沙漠、城市等环境元素。在正常进行游戏过程中,图形用户界面提供有用于承载虚拟对象的虚拟游戏控件,如技能控件,虚拟对象可以在游戏场景中受玩家向终端设备所下达的控制指令的控制而进行技能释放等动作。
38.这里,释放的技能为范围性作用技能,该范围性作用技能在一定的范围内有效,可作用于多个虚拟对象。其中,技能范围是游戏系统预先设置好的。从第一虚拟对象释放技能开始,到技能结束的这段时间内,技能在虚拟场景中的位置可以不发生改变,也可以随着第一虚拟对象在虚拟场景中的位置变化而进行改变。
39.示例性的,若技能作用的第二虚拟对象与第一虚拟对象属于同一阵营,此时,第一虚拟对象释放的技能有助于对第二虚拟对象产生助攻,举例说明,如相关游戏中的“辅助”释放的“回血”技能有助于被该“回血”技能命中的队友提升生命力;若技能作用的第二虚拟对象与第一虚拟对象属于不同阵营,此时,第一虚拟对象释放的技能会对第二虚拟对象产生伤害或眩晕的效果,举例说明,如相关游戏中的“法师”释放的“暴风雪”、“烈焰风暴”、“冰锥术”等会对被命中的敌人产生伤害。
40.在步骤s102中,在第一虚拟对象释放技能的过程中,实时检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合。其中,第二虚拟对象的至少部分运动路径与技能范围重合指的是技能范围对应的区域覆盖第二虚拟对象的至少部分运动路径。
41.本技术实施例中,实时检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合,这样一来,针对每帧数据都要进行虚拟对象的命中检测操作,可以提高命中检测的准确度。
42.一种可选的实施例中,实时检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合的方式与技能范围的区域形状相关。当技能范围的区域形状包括规则图形时,检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合的步骤,包括:
43.步骤1021、确定第二虚拟对象根据当前帧数据所确定的第二位置与预存的第二虚拟对象根据前一帧数据所确定的第一位置之间的目标连线;
44.步骤1022、根据目标连线与技能范围之间的相对位置关系,检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合。
45.在步骤1021中,可以直接从当前帧数据中确定出第二虚拟对象的第二位置,同理,也可以直接从前一帧数据中确定出第二虚拟对象的第一位置,其中,第一位置和第二位置均可以为位置坐标形式,进而确定出第二位置与第一位置之间的目标连线。
46.在步骤1022中,相对位置关系包括相离关系、相交关系、相切关系和包含关系,若目标连线与技能范围之间具有相交关系或包含关系,则认为第二虚拟对象的至少部分运动路径与技能所对应的技能范围重合;若目标连线与技能范围之间具有相离关系或相切关系,则认为第二虚拟对象的运动路径不与技能所对应的技能范围重合。
47.通过上述由第一位置和第二位置组成的目标连线与技能范围之间的相对位置关
系,来判断第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合,判断机制简单,可以避免消耗大量的计算机资源。
48.具体地,规则图形可以是二维的规则图形,如圆形、多边形等,也可以是三维的规则图形,如球形、圆柱体形等。
49.示例性的,当规则图形为圆形时,检测目标连线是否与圆形的技能范围相交,若相交,则说明第二虚拟对象运动经过圆形的技能范围,若没有相交,则说明第二虚拟对象运动没有经过圆形的技能范围。
50.示例性的,当规则图形为矩形时,检测目标连线的其中一个端点是否在矩形的技能范围内;若在,则表示第二虚拟对象经过矩形的技能范围;若目标连线的其中一个端点不在矩形的技能范围内,判断两点组成的线段是否与矩形的技能范围的对角线段有交点,若有,则第二虚拟对象经过矩形的技能范围。
51.示例性的,当规则图形为球形时,检测目标连线的两个端点是否在球形的技能范围内,可以采用目标连线和球心构成一个平面,在平面上用上述方法中目标连线和圆是否有交集的算法进行判断。
52.在步骤s103中,若第二虚拟对象的至少部分运动路径与技能所对应的技能范围重合,则确定第二虚拟对象被第一虚拟对象释放的技能命中。
53.上述步骤中,当第二虚拟对象的至少部分运动路径与技能所对应的技能范围重合时,说明第二虚拟对象在第一虚拟对象释放技能的过程中经过该技能所对应的技能范围,进而可以说明第二虚拟对象在某段时间内被第一虚拟对象释放的技能命中。
54.在本技术实施例中,在确定第二虚拟对象被第一虚拟对象释放的技能命中之后,保存第二虚拟对象根据当前帧数据所确定的第二位置。其中,当检测下一帧数据时,当前保存的第二位置可以继续作为第一位置。
55.这样一来,可以避免由于缺少预先保存的第二虚拟对象的第一位置而无法计算第二虚拟对象的运动路径的问题。
56.本技术实施例能够通过第二虚拟对象的至少部分运动路径与第一虚拟对象释放的技能所对应的技能范围重合的方式来判断第二虚拟对象被第一虚拟对象释放的技能命中,这样可以避免由于虚拟对象释放技能的技能范围较小或虚拟对象在虚拟场景中的移动速度较快所导致的漏检问题,不仅能够提高虚拟对象命中检测的精度,还能够提高虚拟对象命中检测的效率。
57.在本技术的一种可选的实施例中,步骤s102还包括:
58.步骤10211、检测第二虚拟对象的当前状态是否满足目标检测条件;
59.步骤10222、若第二虚拟对象的当前状态满足目标检测条件,则检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合。
60.上述步骤中,第二虚拟对象的当前状态需要满足目标检测条件,才能继续检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合。
61.这里,目标检测条件用于判断是否对第二虚拟对象进行连续性检测(检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合)的先决条件,若检测到第二虚拟对象的当前状态满足目标检测条件,则对第二虚拟对象进行连续性检测,若检测到第二虚拟对象不满足目标检测条件,则保存第二虚拟对象当前在虚拟场景中的位置,并结
束命中检测流程。
62.本技术实施例可以设定在特定场景下选择通过检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合的方式来判断第二虚拟对象是否被第一虚拟对象释放的技能命中,如特定场景可以是虚拟对象释放技能的技能范围较小或虚拟对象在虚拟场景中的移动速度较快的场景,进而可以在一定程度上节省计算机资源。
63.在步骤10211中,第二虚拟对象的当前状态满足目标检测条件包括如下条件之一:检测到存有第二虚拟对象根据前一帧数据所确定的第一位置;第二虚拟对象的移动速度满足根据技能范围所确定的预设条件。
64.上述目标检测条件可以包括检测到存有第二虚拟对象根据前一帧数据所确定的第一位置,检测到存有第二虚拟对象的第一位置,这种情况说明当前特定场景为第二虚拟对象不处于瞬移状态。此时,可以通过检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合的方式来判断第二虚拟对象是否被第一虚拟对象释放的技能命中,从而避免游戏过程中对瞬移的第二虚拟对象进行命中检测,提高游戏的准确性。
65.上述目标检测条件可以包括第二虚拟对象的移动速度满足根据技能范围所确定的预设条件,这种情况说明第二虚拟对象的移动速度满足预设条件,进而可以通过检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合的方式来判断第二虚拟对象是否被第一虚拟对象释放的技能命中。但需要说明的是,这里需要调取历史游戏数据,以确定出第二虚拟对象根据前一帧数据所确定的第一位置,这样才能保证通过检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合的方式来判断第二虚拟对象是否被第一虚拟对象释放的技能命中的方式能够实现,以在一定程度上节省计算机资源。
66.上述目标检测条件还可以同时包括检测到存有第二虚拟对象根据前一帧数据所确定的第一位置以及第二虚拟对象的移动速度满足根据技能范围所确定的预设条件。其一,可以设置本技术实施例在每一次检测后都会保存第二虚拟对象根据当前帧数据所确定的第二位置,以便于在后续检测时用做第二虚拟对象根据前一帧数据所确定的第一位置,进而为通过第二虚拟对象的运动路径进行命中检测提供基础条件,节省时间,提高服务器的处理效率;其二,技能范围的区域形状不同,根据技能范围所确定的预设条件也会存在不同。
67.具体地,通过以下方式确定第二虚拟对象的移动速度满足根据技能范围所确定的预设条件:
68.获取第二虚拟对象在虚拟场景中的移动速度;
69.若获取到的移动速度大于预设速度阈值,则确定第二虚拟对象的移动速度满足预设条件;其中,预设速度阈值是根据技能范围的区域形状和区域尺寸确定的。
70.上述步骤中,预设速度阈值可以参考经验值进行设置,也可以通过以下方式确定:
71.具体地,可以采用如下速度判断函数来确定第二虚拟对象的移动速度满足预设条件:
72.velocity≥threshold/deltatime;
73.其中,deltatime表示预设时间段,velocity表示第二虚拟对象的移动速度,threshold表示预设距离阈值;这里,预设时间段为一帧对应的时长。
74.具体地,threshold可以根据技能范围的区域形状和区域尺寸确定,不同区域形状,计算方法不同,也可取经验值。
75.举例说明,如图2所示,图2为本技术实施例所提供的一种技能范围的界面示意图。针对技能范围的区域形状为圆形,取半径r上距圆心0.9r的点做垂线,以垂线所在的弦长作为threshold。
76.需要说明的是,判断函数可以根据不同区域形状的技能范围去做调整,针对特殊形状的技能范围,减小预设速度阈值以放宽条件,如;若有性能消耗限制,增大预设速度阈值,以收紧条件。即通过调整预设速度阈值,以实现游戏的技能命中漏检发生率以及性能消耗之间的平衡。若在本局虚拟对战中,不仅第一虚拟对象释放技能,还有多个第二虚拟对象也释放技能时,由于技能范围较多,会导致性能消耗较大,为了满足性能消耗限制,可以适当收紧条件,减少命中检测的频率。
77.在步骤10211之后,若第二虚拟对象不满足目标检测条件,则保存第二虚拟对象根据当前帧数据所确定的第二位置。其中,当检测下一帧数据时,当前保存的第二位置可以继续作为第一位置。这样一来,可以避免由于缺少预先保存的第二虚拟对象的第一位置而无法计算第二虚拟对象的运动路径的问题。
78.本技术实施例能够在第二虚拟对象的当前状态满足目标检测条件下,通过第二虚拟对象的至少部分运动路径与第一虚拟对象释放的技能所对应的技能范围重合的方式来判断第二虚拟对象被第一虚拟对象释放的技能命中,不仅可以在一定程度上节省计算机资源,还可以避免由于虚拟对象释放技能的技能范围较小或虚拟对象在虚拟场景中的移动速度较快所导致的漏检问题,不仅能够提高虚拟对象命中检测的精度,还能够提高虚拟对象命中检测的效率。
79.但是考虑到相关方案包括很多帧数据,由于需要对每帧数据都要进行命中检测,涉及大量计算,容易导致处理效率低,从而造成游戏卡顿的问题。为了避免上述问题,本技术实施例提供了另一种虚拟对象的命中检测方法。如图3中所示,本技术实施例提供的命中检测方法,包括:
80.s301、响应第一虚拟对象的技能释放请求,控制第一虚拟对象在虚拟场景中释放技能;
81.s302、检测第二虚拟对象的位置是否在技能所对应的技能范围内;
82.s303、若检测到第二虚拟对象的位置不在技能所对应的技能范围内,则检测第二虚拟对象的当前状态是否满足目标检测条件;
83.s304、若第二虚拟对象的当前状态满足目标检测条件,则检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合;
84.s305、若重合,则确定第二虚拟对象被第一虚拟对象释放的技能命中。
85.其中,针对步骤s301和步骤s305的描述可以参考上述步骤s101和步骤s103的描述,针对步骤s304的描述可以参考上述步骤10222的描述,由于具有相同的技术效果,所以重复内容在此不在赘述。
86.在步骤s302中,在第一虚拟对象释放技能的过程中,检测第二虚拟对象的位置是否在技能所对应的技能范围内,这里直接采用单点检测算法。
87.具体地,单点检测算法可以根据技能范围的区域形状确定。其中,区域形状包括二
维图形和三维图形;当区域形状为二维图形时,可以为规则图形,如圆形、多边形等,也可以为不规则图形;当区域形状为三维图形时,可以为规则图形,如球形、圆柱体形等,也可以为不规则图形。
88.示例性的,当区域形状为多边形等规则图形时,通过以下方式检测第二虚拟对象是否在技能所对应的技能范围内:取第二虚拟对象根据当前帧数据所确定的第二位置;以第二位置为起点做射线,根据射线与所述技能范围的交点的数量,确定第二虚拟对象的位置是否在技能所对应的技能范围内。当区域形状为圆形或球形时,通过以下方式检测第二虚拟对象是否在技能所对应的技能范围内:获取技能范围的中心位置以及第二虚拟对象根据当前帧数据所确定的第二位置;确定第二位置与技能范围的中心位置之间的距离;根据距离与预设阈值之间的大小关系,确定第二虚拟对象是否在技能范围内。其中,针对区域形状为圆形来说,中心位置为圆心,预设阈值为圆的半径;针对区域形状为球形来说,中心位置为球心,预设阈值为球的半径。
89.举例说明,当区域形状为矩形时,从第二位置出发引一条射线,看这条射线和矩形所有边的交点数目。如果有奇数个交点,则说明第二虚拟对象在技能范围的内部;如果有偶数个交点,则说明第二虚拟对象在技能范围的外部。
90.上述方式中,本技术实施例先通过离散的单点检测方式进行命中检测,在命中检测没有成功的条件下以及在第二虚拟对象的当前状态满足目标检测条件下,再通过连续性检测的方式(检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合)进行命中检测,由于单点检测的方式较连续性检测的方式所需消耗的计算机资源较少,所以通过上述方式不仅可以减少计算量,从而避免因为计算量较大而导致的处理效率较低,耗时较长的问题,有利于游戏顺畅运行,还能够提高虚拟对象命中检测的精度,还能够提高虚拟对象命中检测的效率。
91.本技术实施例中,当技能范围的区域形状包括不规则图形时,采用现有的方式判断目标连线是否与技能范围之间具有相交关系会存在较大误差,即针对区域形状为不规则图形的技能范围,目前没有成熟的算法可以判断目标连线是否与不规则技能范围之间具有相交关系,进而导致无法进行较为准确的命中检测计算。为了解决上述存在的技术问题,本技术实施例提供的命中检测方法还包括:
92.步骤401、根据技能范围的区域尺寸以及第二虚拟对象的移动速度,确定插值数量。
93.其中,在步骤401中,根据第二虚拟对象的移动速度以及一帧对应的时长,确定第二虚拟对象在一帧对应的时长内的移动距离;根据技能范围的区域尺寸与移动距离之间的比值,确定插值数量。
94.具体地,通过以下公式确定插值数量:
[0095][0096]
其中,times表示插值数量,deltatime表示预设时间段,velocity表示第二虚拟对象的移动速度,threshold表示预设距离阈值,其中,预设时间段为一帧对应的时长。
[0097]
步骤402、在第二虚拟对象根据当前帧数据所确定的第二位置与预存的第二虚拟对象根据前一帧数据所确定的第一位置之间插入插值数量个位置点。
[0098]
这里,在第二位置和第一位置之间的连线上插入位置点,其中,插入位置点的数量与确定出的插值数量相同。
[0099]
步骤403、检测除了第二位置之外的任一位置点是否在技能范围内。
[0100]
本技术实施例中,当技能范围的区域形状为不规则图形时,可以采用上述方式进行命中检测,使命中检测的适用范围更广,进而使得玩家在进行命中检测时不受技能范围的区域形状限制,提高了对虚拟对象进行命中检测的精度。
[0101]
相关方案中,在游戏过程中存在虚拟对象瞬移的情况,在第二虚拟对象瞬移的过程中,若对第二虚拟对象进行命中检测,导致第二虚拟对象在瞬移过程中被命中,造成玩家的困惑,为了避免游戏过程中对瞬移的第二虚拟对象进行命中检测,本技术实施例采用如下方式来避免上述存在的技术问题:
[0102]
若检测到第二虚拟对象在虚拟场景中进行瞬间移动,则清空预存的第二虚拟对象根据前一帧数据所确定的第一位置。
[0103]
这样一来,在第二虚拟对象瞬移的过程中,不会对该瞬移的第二虚拟对象进行命中检测,从而避免游戏过程中对瞬移的第二虚拟对象进行命中检测,提高游戏的准确性。
[0104]
需要说明的是,本技术实施例在使用上述命中检测方法时,需要预先构建一个类结构,类结构中包含的函数,有单点检测函数(用于检测第二虚拟对象是否在技能对应的技能范围内)、连续性检测函数(用于检测第二虚拟对象是否经过所述技能范围)、判断是否需要连续性检测的函数(用于判断是否满足检测切换条件)等;并且针对不同区域形状的技能范围,还可以派生对应的子类。如采用合理的类结构,设置一个基类,并为不同的形状,如长方体、圆柱体、球等,分别派生相应的子类,便于后续新形状的加入以及更多的需求拓展。这样一来,类结构设计合理,能应对更多区域形状的加入,能较好地应对游戏实际需求的拓展,易于调整和适应。
[0105]
举例说明,如图4所示,图4为本技术实施例所提供的一种类图示意图。如图4所示,基础方法basemethod中包括如下几种算法,其中,check_range是检测函数,即为上述命中检测过程的入口,discrete_check是单点检测函数,需要被子类复写;continuous_check是连续性检测函数,在基类中以插值算法实现,若子类没有重载,则插值作为默认的连续性检测算法;get_inter_num函数返回每帧插值的数量,采用默认的连续性检测会被调用;need_check_continuous判断是否需要进行连续性检测的函数,可在子类中复写。子类包括方格法squaremethod、圆法circlemethod、圆柱法cylindermethod、球法spheremethod和菱形法rhombusmethod。
[0106]
本技术实施例提供的虚拟对象的命中检测方法,能够通过离散的单点检测方法检测第二虚拟对象的位置是否在技能所对应的技能范围内,若检测到第二虚拟对象的位置不在技能所对应的技能范围内,则检测第二虚拟对象的当前状态是否满足目标检测条件;若第二虚拟对象的当前状态满足目标检测条件,则检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合,若重合,则确定所述第二虚拟对象被第一虚拟对象释放的技能命中。这样可以避免由于虚拟对象释放技能的技能范围较小或虚拟对象在虚拟场景中的移动速度较快所导致的漏检问题,不仅能够提高虚拟对象命中检测的精度,还能够提高虚拟对象命中检测的效率。同时,先使用离散点检测方法检测第二虚拟对象是否被第一虚拟对象释放的技能命中,并在通过离散点检测方法无法检测到第二虚拟对象被第一虚拟
对象释放的技能命中的条件下,在第二虚拟对象的当前状态满足目标检测条件的情况下,继续使用连续性检测方法(通过至少部分运动路径是否与技能所对应的技能范围重合)来检测第二虚拟对象是否被第一虚拟对象释放的技能命中,这样可以在不消耗大量计算资源的条件下提高虚拟对象命中检测的精度和检测的效率。
[0107]
基于同一发明构思,本技术实施例中还提供了与虚拟对象的命中检测方法对应的虚拟对象的命中检测装置,由于本技术实施例中的装置解决问题的原理与本技术实施例上述虚拟对象的命中检测方法相似,因此装置的实施可以参见方法的实施,重复之处不再赘述。
[0108]
请参阅图5、图6,图5为本技术实施例所提供的一种虚拟对象的命中检测装置的结构示意图,图6为本技术实施例所提供的另一种虚拟对象的命中检测装置的结构示意图。如图5中所示,命中检测装置500包括:
[0109]
技能释放模块501,用于响应第一虚拟对象的技能释放请求,控制第一虚拟对象在虚拟场景中释放技能;
[0110]
路径检测模块502,用于检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合;
[0111]
技能命中模块503,用于若重合,则确定第二虚拟对象被第一虚拟对象释放的技能命中。
[0112]
在本技术的一种可选实施例中,路径检测模块502具体用于:
[0113]
检测所述第二虚拟对象的当前状态是否满足目标检测条件;
[0114]
若所述第二虚拟对象的当前状态满足目标检测条件,则检测第二虚拟对象的至少部分运动路径是否与所述技能所对应的技能范围重合。
[0115]
在本技术的一种可选实施例中,所述第二虚拟对象的当前状态满足目标检测条件包括如下条件之一:检测到存有第二虚拟对象根据前一帧数据所确定的第一位置;第二虚拟对象的移动速度满足根据技能范围所确定的预设条件。
[0116]
在本技术的一种可选实施例中,路径检测模块502具体通过以下方式确定第二虚拟对象的移动速度满足根据技能范围所确定的预设条件:
[0117]
获取第二虚拟对象在虚拟场景中的移动速度;
[0118]
若获取到的移动速度大于预设速度阈值,则确定第二虚拟对象的移动速度满足预设条件;其中,预设速度阈值是根据技能范围的区域形状和区域尺寸确定的。
[0119]
在本技术的一种可选实施例中,路径检测模块502具体还用于:
[0120]
检测第二虚拟对象的位置是否在技能所对应的技能范围内;
[0121]
若检测到第二虚拟对象的位置不在技能所对应的技能范围内,则检测第二虚拟对象的当前状态是否满足目标检测条件。
[0122]
在本技术的一种可选实施例中,路径检测模块502具体还用于:
[0123]
获取第二虚拟对象根据当前帧数据所确定的第二位置;
[0124]
以第二位置为起点做射线,根据射线与技能范围的交点的数量,确定第二虚拟对象的位置是否在技能所对应的技能范围内;
[0125]
或,获取技能范围的中心位置以及第二虚拟对象根据当前帧数据所确定的第二位置;
[0126]
确定第二位置与技能范围的中心位置之间的距离;
[0127]
根据距离与预设阈值之间的大小关系,确定第二虚拟对象是否在技能范围内。
[0128]
在本技术的一种可选实施例中,技能范围的区域形状包括规则图形,路径检测模块502具体还用于:
[0129]
确定第二虚拟对象根据当前帧数据所确定的第二位置与预存的第二虚拟对象根据前一帧数据所确定的第一位置之间的目标连线;
[0130]
根据目标连线与技能范围之间的相对位置关系,检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合。
[0131]
进一步地,如图6所示,所述技能范围的区域形状包括不规则图形,命中检测装置500还包括插值检测模块504,插值检测模块504用于:
[0132]
根据技能范围的区域尺寸以及第二虚拟对象的移动速度,确定插值数量;
[0133]
在第二虚拟对象根据当前帧数据所确定的第二位置与预存的第二虚拟对象根据前一帧数据所确定的第一位置之间插入插值数量个位置点;
[0134]
检测除了第二位置之外的任一位置点是否在技能范围内。
[0135]
在本技术的一种可选实施例中,插值检测模块504具体用于:
[0136]
根据第二虚拟对象的移动速度以及一帧对应的时长,确定第二虚拟对象在一帧对应的时长内的移动距离;
[0137]
根据技能范围的区域尺寸与移动距离之间的比值,确定插值数量。
[0138]
在本技术的一种可选实施例中,命中检测装置还包括位置保存模块(图中未示出),位置保存模块用于:
[0139]
在确定第二虚拟对象被第一虚拟对象释放的技能命中之后,保存第二虚拟对象根据当前帧数据所确定的第二位置;
[0140]
或,在确定第二虚拟对象不满足目标检测条件之后,保存第二虚拟对象根据当前帧数据所确定的第二位置。
[0141]
在本技术的一种可选实施例中,命中检测装置还包括位置清空模块(图中未示出),位置清空模块用于:
[0142]
若检测到第二虚拟对象在虚拟场景中进行瞬间移动,则清空预存的第二虚拟对象根据前一帧数据所确定的第一位置。
[0143]
本技术实施例提供的虚拟对象的命中检测装置,能够通过离散点检测方法检测第二虚拟对象的位置是否在技能所对应的技能范围内,若检测到第二虚拟对象的位置不在技能所对应的技能范围内,则检测第二虚拟对象的当前状态是否满足目标检测条件;若第二虚拟对象的当前状态满足目标检测条件,则检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合,若重合,则确定第二虚拟对象被第一虚拟对象释放的技能命中。这样可以避免由于虚拟对象释放技能的技能范围较小或虚拟对象在虚拟场景中的移动速度较快所导致的漏检问题,不仅能够提高虚拟对象命中检测的精度,还能够提高虚拟对象命中检测的效率。同时,先使用离散点检测方法检测第二虚拟对象是否被第一虚拟对象释放的技能命中,并在通过离散点检测方法无法检测到第二虚拟对象被第一虚拟对象释放的技能命中的条件下,在第二虚拟对象的当前状态满足目标检测条件的情况下,继续使用连续性检测方法(通过至少部分运动路径是否与技能所对应的技能范围重合)来检测第二
虚拟对象是否被第一虚拟对象释放的技能命中,这样可以在不消耗大量计算资源的条件下提高虚拟对象命中检测的精度和检测的效率。
[0144]
请参阅图7,图7为本技术实施例所提供的一种电子设备的结构示意图。如图7中所示,所述电子设备700包括处理器701、存储器702和总线703。
[0145]
所述存储器702存储有所述处理器701可执行的机器可读指令,当电子设备700运行时,所述处理器701与所述存储器702之间通过总线703通信,使得处理器701在运行时执行以下指令:
[0146]
响应第一虚拟对象的技能释放请求,控制第一虚拟对象在虚拟场景中释放技能;
[0147]
检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合;
[0148]
若重合,则确定第二虚拟对象被第一虚拟对象释放的技能命中。
[0149]
在本技术的一种可选实施例中,处理器701执行的指令中,检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合的步骤,包括:
[0150]
检测第二虚拟对象的当前状态是否满足目标检测条件;
[0151]
若第二虚拟对象的当前状态满足目标检测条件,则检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合。
[0152]
在本技术的一种可选实施例中,第二虚拟对象的当前状态满足目标检测条件包括如下条件之一:检测到存有第二虚拟对象根据前一帧数据所确定的第一位置;第二虚拟对象的移动速度满足根据技能范围所确定的预设条件。
[0153]
在本技术的一种可选实施例中,处理器701执行的指令中,通过以下方式确定第二虚拟对象的移动速度满足根据技能范围所确定的预设条件:
[0154]
获取第二虚拟对象在虚拟场景中的移动速度;
[0155]
若获取到的移动速度大于预设速度阈值,则确定第二虚拟对象的移动速度满足预设条件;其中,预设速度阈值是根据技能范围的区域形状和区域尺寸确定的。
[0156]
在本技术的一种可选实施例中,处理器701执行的指令中,检测第二虚拟对象的当前状态是否满足目标检测条件的步骤,包括:
[0157]
检测第二虚拟对象的位置是否在技能所对应的技能范围内;
[0158]
若检测到第二虚拟对象的位置不在技能所对应的技能范围内,则检测第二虚拟对象的当前状态是否满足目标检测条件。
[0159]
在本技术的一种可选实施例中,处理器701执行的指令中,检测第二虚拟对象的位置是否在技能所对应的技能范围内的步骤,包括:
[0160]
获取第二虚拟对象根据当前帧数据所确定的第二位置;
[0161]
以第二位置为起点做射线,根据射线与技能范围的交点的数量,确定第二虚拟对象的位置是否在技能所对应的技能范围内;
[0162]
或,获取技能范围的中心位置以及第二虚拟对象根据当前帧数据所确定的第二位置;
[0163]
确定第二位置与技能范围的中心位置之间的距离;
[0164]
根据距离与预设阈值之间的大小关系,确定第二虚拟对象是否在技能范围内。
[0165]
在本技术的一种可选实施例中,技能范围的区域形状包括规则图形,处理器701执行的指令中,检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合的
步骤,包括:
[0166]
确定第二虚拟对象根据当前帧数据所确定的第二位置与预存的第二虚拟对象根据前一帧数据所确定的第一位置之间的目标连线;
[0167]
根据目标连线与技能范围之间的相对位置关系,检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合。
[0168]
在本技术的一种可选实施例中,技能范围的区域形状包括不规则图形,处理器701执行的指令中,还包括:
[0169]
根据技能范围的区域尺寸以及第二虚拟对象的移动速度,确定插值数量;
[0170]
在第二虚拟对象根据当前帧数据所确定的第二位置与预存的第二虚拟对象根据前一帧数据所确定的第一位置之间插入插值数量个位置点;
[0171]
检测除了第二位置之外的任一位置点是否在技能范围内。
[0172]
在本技术的一种可选实施例中,处理器701执行的指令中,根据技能范围的区域尺寸以及第二虚拟对象的移动速度,确定插值数量的步骤,包括:
[0173]
根据第二虚拟对象的移动速度以及一帧对应的时长,确定第二虚拟对象在一帧对应的时长内的移动距离;
[0174]
根据技能范围的区域尺寸与移动距离之间的比值,确定插值数量。
[0175]
在本技术的一种可选实施例中,处理器701执行的指令中,还包括:
[0176]
在确定第二虚拟对象被第一虚拟对象释放的技能命中之后,保存第二虚拟对象根据当前帧数据所确定的第二位置;
[0177]
或,在确定第二虚拟对象不满足目标检测条件之后,保存第二虚拟对象根据当前帧数据所确定的第二位置。
[0178]
在本技术的一种可选实施例中,处理器701执行的指令中,还包括:
[0179]
若检测到第二虚拟对象在虚拟场景中进行瞬间移动,则清空预存的第二虚拟对象根据前一帧数据所确定的第一位置。
[0180]
本技术实施例能够通过离散点检测方法检测第二虚拟对象的位置是否在技能所对应的技能范围内,若检测到第二虚拟对象的位置不在技能所对应的技能范围内,则检测第二虚拟对象的当前状态是否满足目标检测条件;若第二虚拟对象的当前状态满足目标检测条件,则检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合,若重合,则确定所述第二虚拟对象被第一虚拟对象释放的技能命中。这样可以避免由于虚拟对象释放技能的技能范围较小或虚拟对象在虚拟场景中的移动速度较快所导致的漏检问题,不仅能够提高虚拟对象命中检测的精度,还能够提高虚拟对象命中检测的效率。同时,先使用离散点检测方法检测第二虚拟对象是否被第一虚拟对象释放的技能命中,并在通过离散点检测方法无法检测到第二虚拟对象被第一虚拟对象释放的技能命中的条件下,在第二虚拟对象的当前状态满足目标检测条件的情况下,继续使用连续性检测方法(通过至少部分运动路径是否与技能所对应的技能范围重合)来检测第二虚拟对象是否被第一虚拟对象释放的技能命中,这样可以在不消耗大量计算资源的条件下提高虚拟对象命中检测的精度和检测的效率。
[0181]
本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行以下命令:
[0182]
响应第一虚拟对象的技能释放请求,控制第一虚拟对象在虚拟场景中释放技能;
[0183]
检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合;
[0184]
若重合,则确定第二虚拟对象被第一虚拟对象释放的技能命中。
[0185]
在本技术的一种可选实施例中,计算机可读存储介质执行的指令中,检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合的步骤,包括:
[0186]
检测第二虚拟对象的当前状态是否满足目标检测条件;
[0187]
若第二虚拟对象的当前状态满足目标检测条件,则检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合。
[0188]
在本技术的一种可选实施例中,第二虚拟对象的当前状态满足目标检测条件包括如下条件之一:检测到存有第二虚拟对象根据前一帧数据所确定的第一位置;第二虚拟对象的移动速度满足根据技能范围所确定的预设条件。
[0189]
在本技术的一种可选实施例中,计算机可读存储介质执行的指令中,通过以下方式确定第二虚拟对象的移动速度满足根据技能范围所确定的预设条件:
[0190]
获取第二虚拟对象在虚拟场景中的移动速度;
[0191]
若获取到的移动速度大于预设速度阈值,则确定第二虚拟对象的移动速度满足预设条件;其中,预设速度阈值是根据技能范围的区域形状和区域尺寸确定的。
[0192]
在本技术的一种可选实施例中,计算机可读存储介质执行的指令中,检测第二虚拟对象的当前状态是否满足目标检测条件的步骤,包括:
[0193]
检测第二虚拟对象的位置是否在技能所对应的技能范围内;
[0194]
若检测到第二虚拟对象的位置不在技能所对应的技能范围内,则检测第二虚拟对象的当前状态是否满足目标检测条件。
[0195]
在本技术的一种可选实施例中,计算机可读存储介质执行的指令中,检测第二虚拟对象的位置是否在技能所对应的技能范围内的步骤,包括:
[0196]
获取第二虚拟对象根据当前帧数据所确定的第二位置;
[0197]
以第二位置为起点做射线,根据射线与技能范围的交点的数量,确定第二虚拟对象的位置是否在技能所对应的技能范围内;
[0198]
或,获取技能范围的中心位置以及第二虚拟对象根据当前帧数据所确定的第二位置;
[0199]
确定第二位置与技能范围的中心位置之间的距离;
[0200]
根据距离与预设阈值之间的大小关系,确定第二虚拟对象是否在技能范围内。
[0201]
在本技术的一种可选实施例中,技能范围的区域形状包括规则图形,计算机可读存储介质执行的指令中,检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合的步骤,包括:
[0202]
确定第二虚拟对象根据当前帧数据所确定的第二位置与预存的第二虚拟对象根据前一帧数据所确定的第一位置之间的目标连线;
[0203]
根据目标连线与技能范围之间的相对位置关系,检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合。
[0204]
在本技术的一种可选实施例中,技能范围的区域形状包括不规则图形,计算机可读存储介质执行的指令中,还包括:
[0205]
根据技能范围的区域尺寸以及第二虚拟对象的移动速度,确定插值数量;
[0206]
在第二虚拟对象根据当前帧数据所确定的第二位置与预存的第二虚拟对象根据前一帧数据所确定的第一位置之间插入插值数量个位置点;
[0207]
检测除了第二位置之外的任一位置点是否在技能范围内。
[0208]
在本技术的一种可选实施例中,计算机可读存储介质执行的指令中,根据技能范围的区域尺寸以及第二虚拟对象的移动速度,确定插值数量的步骤,包括:
[0209]
根据第二虚拟对象的移动速度以及一帧对应的时长,确定第二虚拟对象在一帧对应的时长内的移动距离;
[0210]
根据技能范围的区域尺寸与移动距离之间的比值,确定插值数量。
[0211]
在本技术的一种可选实施例中,计算机可读存储介质执行的指令中,还包括:
[0212]
在确定第二虚拟对象被第一虚拟对象释放的技能命中之后,保存第二虚拟对象根据当前帧数据所确定的第二位置;
[0213]
或,在确定第二虚拟对象不满足目标检测条件之后,保存第二虚拟对象根据当前帧数据所确定的第二位置。
[0214]
在本技术的一种可选实施例中,计算机可读存储介质执行的指令中,还包括:
[0215]
若检测到第二虚拟对象在虚拟场景中进行瞬间移动,则清空预存的第二虚拟对象根据前一帧数据所确定的第一位置。
[0216]
本技术实施例能够通过离散点检测方法检测第二虚拟对象的位置是否在技能所对应的技能范围内,若检测到第二虚拟对象的位置不在技能所对应的技能范围内,则检测第二虚拟对象的当前状态是否满足目标检测条件;若第二虚拟对象的当前状态满足目标检测条件,则检测第二虚拟对象的至少部分运动路径是否与技能所对应的技能范围重合,若重合,则确定所述第二虚拟对象被第一虚拟对象释放的技能命中。这样可以避免由于虚拟对象释放技能的技能范围较小或虚拟对象在虚拟场景中的移动速度较快所导致的漏检问题,不仅能够提高虚拟对象命中检测的精度,还能够提高虚拟对象命中检测的效率。同时,先使用离散点检测方法检测第二虚拟对象是否被第一虚拟对象释放的技能命中,并在通过离散点检测方法无法检测到第二虚拟对象被第一虚拟对象释放的技能命中的条件下,在第二虚拟对象的当前状态满足目标检测条件的情况下,继续使用连续性检测方法(通过至少部分运动路径是否与技能所对应的技能范围重合)来检测第二虚拟对象是否被第一虚拟对象释放的技能命中,这样可以在不消耗大量计算资源的条件下提高虚拟对象命中检测的精度和检测的效率。
[0217]
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
[0218]
在本技术所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,又例如,多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些通信接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
[0219]
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显
示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0220]
另外,在本技术各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
[0221]
所述功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个处理器可执行的非易失的计算机可读取存储介质中。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本技术各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(read-only memory,rom)、随机存取存储器(random access memory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。
[0222]
最后应说明的是:以上所述实施例,仅为本技术的具体实施方式,用以说明本技术的技术方案,而非对其限制,本技术的保护范围并不局限于此,尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本技术实施例技术方案的精神和范围,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。