1.本发明涉及双边电机控制技术领域,主要涉及一种双边悬浮电机的构造方法。
背景技术:
2.双边电机采用两个定子分别分配绕组和永磁体,增加了永磁体的空间和电枢线圈,提高了电磁转矩和改善了永磁体的热状态。相比于气悬浮方式,磁悬浮具有刚度大、承载力高的优点,并且可以适应超洁净领域和真空制造环境,无需精密加工气浮支撑表面从而降低系统制造成本,因此被广泛使用。目前双边电机的悬浮绕组绕制方法没有相对正确统一的理论,因此针对一个物理结构确定的双边电机,需要寻求一种悬浮绕组的绕制方法来使电机产生较平稳的悬浮力。
3.专利“一种非对称双边长初级磁悬浮永磁直线同步电机”(申请号:202210156103.1)提出双边直线电机的悬浮绕组绕制方法,在电机的下层悬浮初级侧绕制悬浮绕组,利用上层推进初级和下层悬浮初级与所述次级结构在法向方向的空载法向力之差作为悬浮力,绕制的悬浮绕组用于调节悬浮力。但该种方案是在双边直线电机的前提下提出,利用的是直线电机自身的结构特性,在旋转电机中并不适用,因此在旋转双边电机中要寻找新的悬浮绕组绕制方法来使电机产生较平稳的悬浮力。
4.论文《无轴承薄片电机基础研究,南京航空航天大学,2009.》提出电枢磁场和悬浮磁场相差一对极,电机就能产生可控悬浮力。但是该方法针对的是传统非调制类电机,对于调制类双边电机并不能直接适用,需要考虑双边电机中的调制效应,增加新的约束条件,重新设计悬浮绕组的绕制方法。
技术实现要素:
5.发明目的:针对上述背景技术中存在的问题,本发明提供一种双边悬浮电机的构造方法,采用傅里叶分解的方法,根据悬浮力产生的条件和新增的约束条件来筛选出悬浮绕组绕制方式,解决了直线电机悬浮绕组绕制方法在旋转电机上不能适用的问题,考虑了双边电机的调制效应,弥补了传统非调制类电机悬浮绕组绕制方法在调制类双边电机中的不足。
6.技术方案:为实现上述目的,本发明采用的技术方案为:
7.一种双边悬浮电机的构造方法,所述的双边电机采用分区定子结构,外定子为2ps槽,内定子为2ps极,中间转子调制块为nr极;内定子为永磁体表贴式ns径向充磁。
8.首先确定永磁体极对数和调制块个数,本发明所述的双边电机采用分区定子结构,外定子为2ps槽,内定子为2ps极,中间转子调制块为nr极,内定子为永磁体表贴式ns径向充磁,故可知永磁体极对数为ps对极,调制块极对数为nr对极;然后把永磁体的磁势修成正弦,修改永磁体形状为柳叶眉形两边窄中间宽,使永磁体的磁势在充磁方向上按正弦分布;采用傅里叶分解方法来确定永磁体的旋转和静止的基波极对数;最后根据悬浮力产生的条件来绕制悬浮绕组。
9.进一步地,筛选合适的悬浮绕组绕制方法的具体步骤包括:
10.步骤s1、运用傅里叶分解方法,由于永磁体在内定子表面是静止的,故永磁体磁势傅里叶表达式为
[0011][0012]
其中θ1是永磁体的半弧角度,θ3是永磁体的半弧加定子齿弧角度,f
pm
是永磁体磁动势幅值。可知永磁体本身在电机气隙中会产生极对数为(2i-1)ps的静止磁场,其中i=1,2,3,...,,ps为永磁体的极对数,并且这些磁场的旋转速度为零属于静止波,当修改永磁体的形状后,永磁体的磁势在充磁方向上按正弦分布,气隙中的谐波分量会消除,此时气隙磁场为极对数为ps的磁场。
[0013]
此时调制块的极对数为nr,调制块的气隙磁导傅里叶表达式为
[0014][0015]
其中ωr为调制块的机械角速度,θ0为初始调制块磁极位置,θ2为调制块的半弧角度,p0为磁导的直流分量,p2为磁导波形峰谷值之差的一半。
[0016]
由于气隙磁密等于磁动势与气隙磁导的乘积,故气隙磁密傅里叶表达式为
[0017][0018]
可知永磁体产生的磁场经过调制块的调制后,会在气隙中产生极对数为knr (2i-1)ps和|kn
r-(2i-1)ps|的旋转磁场,其中k=1,2,3,...,,极对数为knr (2i-1)ps的磁场的旋转速度为极对数为|kn
r-(2i-1)ps|的磁场的旋转速度为
[0019]
步骤s2、考虑主要磁场极对数,故取k=1,由于极对数为knr (2i-1)ps的磁场极对
数过高,绕组绕制成knr (2i-1)ps对极时利用的是绕组的高次谐波分量,其幅值很小对悬浮力贡献小,故在分析悬浮绕组绕制时不予考虑,故只分析极对数为|kn
r-(2i-1)ps|的磁场,由前面已知永磁体本身在电机气隙中会产生极对数为(2i-1)ps的静止磁场,该磁场在永磁体磁势为正弦后只有极对数为ps的静止磁场,其电角速度也为零;当k=1时,调制之后的磁场极对数为(n
r-ps),该磁场的旋转速度为其电角速度为故此时气隙中有永磁体本身产生的极对数为ps的磁场,该磁场旋转速度为零属于静止波,其电角速度也为零,还有永磁体磁场经过调制块调制后的极对数为(n
r-ps)的磁场,该磁场的旋转速度为其电角速度为
[0020]
步骤s3、根据悬浮力产生的条件,当气隙中两个磁场的极对数差一对极并且两个磁场的电角速度相同时,电机中才能产生可控的悬浮力。由步骤s2可知,此时气隙中旋转磁场的极对数为(n
r-ps),故可以将悬浮绕组绕制成(n
r-p
s-1)对极或者(n
r-ps 1)对极。
[0021]
步骤s4、针对传统非调制类电机,电枢绕组和悬浮绕组相差一对极,电机能产生可控的平稳悬浮力,本发明的双边电机属于调制类电机,电机中存在调制效应,故提出约束条件:(n
r-ps)=ps±
2。
[0022]
当气隙中旋转磁场的极对数为(n
r-ps)满足(n
r-ps)=p
s-2时,第一种绕法为悬浮绕组绕制成(n
r-ps 1)对极,此时绕组会在气隙中产生极对数为(n
r-ps 1)的磁场谐波,该磁场的旋转速度为其电角速度为该(n
r-ps 1)次谐波经过调制块调制后会在气隙中产生极对数为n
r-(n
r-ps 1)=p
s-1的磁场,该磁场的旋转速度为零属于静止波,其电角速度也为零;此时永磁体本身产生的极对数为ps的磁场和悬浮绕组经过调制块调制产生的极对数为p
s-1的磁场刚好满足极对数差一,且电角速度相同都为零,可以产生平稳的悬浮力,此外永磁体经过调制块调制产生的极对数为(n
r-ps)的磁场和悬浮绕组本身产生的极对数为(n
r-ps 1)的磁场刚好满足极对数差一,且电角速度相同都为nrωr,可以产生平稳的悬浮力,但此时永磁体本身产生的极对数为ps的磁场和悬浮绕组本身产生的极对数为(n
r-ps 1)的磁场满足极对数差一,但两个磁场的电角速度不相同,前者电角速度为零,后者电角速度为nrωr,两个磁场会产生悬浮力脉动,综上,在此种情况下,当悬浮绕组绕制成(n
r-ps 1)对极时,电机会产生有很大悬浮力脉动的悬浮力,不能产生较平稳的悬浮力。第二种绕法为悬浮绕组绕制成(n
r-p
s-1)对极,此时绕组会在气隙中产生极对数为(n
r-p
s-1)的磁场谐波,该磁场的旋转速度为其电角速度为该(n
r-p
s-1)次谐波经过调制块调制后会在气隙中产生极对数为n
r-(n
r-p
s-1)=ps 1的磁场,该磁场的旋转速度为零属于静止波,其电角速度也为零;此时永磁体本身产生的极对数为ps的磁场和悬浮绕组经过调制块调制产生的极对数为ps 1的磁场刚好满足极对数差一,且电角速度相同都为零,可以产生平稳的悬浮力,此外永磁体经过调制块调制产生的极对数为(n
r-ps)的磁场和悬浮绕组本身产生的极对数为(n
r-p
s-1)的磁场刚好满足极对数差一,且电角速度相同都为nrωr,可以产生平稳的悬浮力,综
上,当悬浮绕组绕制成(n
r-p
s-1)对极时,电机会产生较平稳的悬浮力。当气隙中旋转磁场的极对数为(n
r-ps)满足(n
r-ps)=ps 2时,悬浮绕组绕制成(n
r-ps 1)对极产生较平稳的悬浮力。当气隙中旋转磁场的极对数为(n
r-ps)不满足(n
r-ps)=ps±
2时,悬浮绕组绕制成(n
r-p
s-1)对极或者(n
r-ps 1)对极都能产生较平稳的悬浮力,分析方法如上。
[0023]
有益效果:
[0024]
本发明提供一种双边悬浮电机的构造方法,采用傅里叶分解的方法,根据新增的约束条件和悬浮力产生的条件来筛选出悬浮绕组绕制方式。本发明所提出的悬浮绕组绕制方法,解决了直线电机悬浮绕组绕制方法在旋转电机上不能适用的问题,考虑了双边电机的调制效应,弥补了传统非调制类电机悬浮绕组绕制方法在调制类双边电机中的不足。
附图说明
[0025]
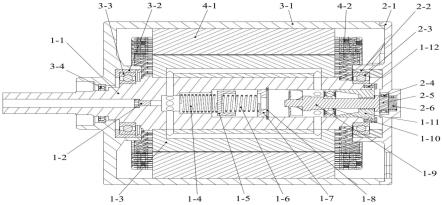
图1是本发明实施例中提供的双边电机总体的结构图;
[0026]
图2是本发明实施例中提供的双边电机转子调制块的结构图;
[0027]
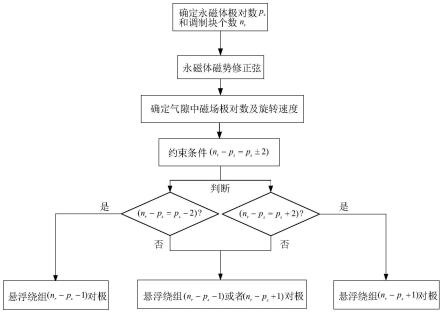
图3是本发明提供的双边电机的悬浮绕组绕制方法原理图;
[0028]
图4是本发明实施例中悬浮绕组3对极绕制图;
[0029]
图5是本发明实施例中悬浮绕组3对极电机悬浮力图;
[0030]
图6是本发明实施例中悬浮绕组5对极绕制图;
[0031]
图7是本发明实施例中悬浮绕组5对极电机悬浮力图;
[0032]
图中:1.悬浮绕组;2.中间转子;3.外定子;4.内定子表贴永磁体;5.内定子;6.导磁块。
具体实施方式
[0033]
下面结合附图对本发明作更进一步的说明。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
本发明提供的一种双边悬浮电机的构造方法采用双边电机结构,具体实施采用常用的一种双边电机结构,该双边电机为分区定子,外定子为12槽,内定子为12极,中间转子调制块为10极;内定子为永磁体表贴式ns径向充磁。故在该具体双边电机中,内定子极对数ps=6,转子调制块极对数nr=10。其中双边电机总体结构图如1所示,箭头表示内定子永磁体的充磁方向,永磁体形状可修,转子调制块结构图如图2所示。
[0035]
把永磁体的磁势修成正弦,修改永磁体形状为柳叶眉形两边窄中间宽,使永磁体的磁势在充磁方向上按正弦分布。接着,采用傅里叶分解方法来确定永磁体的旋转和静止的基波极对数;最后根据悬浮力产生的条件来绕制悬浮绕组,具体如3图所示。
[0036]
步骤s1、运用傅里叶分解方法,由于永磁体在内定子表面是静止的,
[0037][0038]
永磁体本身在电机气隙中会产生极对数为(2i-1)*6的静止磁场,其中i=1,2,3,...,,并且这些磁场的旋转速度为零属于静止波,当修改永磁体的形状后,永磁体的磁势在充磁方向上按正弦分布,气隙中的谐波分量会消除,此时气隙磁场为极对数为6的磁场。
[0039]
此时调制块的极对数为10,调制块的气隙磁导傅里叶表达式为
[0040][0041]
由于气隙磁密等于磁动势与气隙磁导的乘积,故气隙磁密傅里叶表达式为
[0042][0043]
可知永磁体产生的磁场经过调制块的调制后,会在气隙中产生极对数为k*10 (2i-1)*6和|k*10-(2i-1)*6|的旋转磁场,其中k=1,2,3,...,,极对数为k*10 (2i-1)*6的磁场的旋转速度为极对数为|k*10-(2i-1)*6|的磁场的旋转速度为
[0044]
步骤s2、考虑主要磁场极对数,故取k=1,由于极对数为16的磁场极对数过高,绕组绕制成16对极时利用的是绕组的高次谐波分量,其幅值很小对悬浮力贡献小,故在分析悬浮绕组绕制时不予考虑,故只分析极对数为4的磁场,由前面已知永磁体本身在电机气隙中会产生极对数为(2i-1)*6的静止磁场,该磁场在永磁体磁势为正弦后只有极对数为6的静止磁场,其电角速度为零;当k=1时,调制之后的磁场极对数为4,该磁场的旋转速度为
其电角速度为故此时气隙中有永磁体本身产生的极对数为6的磁场,该磁场旋转速度为零属于静止波,其电角速度为零,还有永磁体磁场经过调制块调制后的极对数为4的磁场,该磁场的旋转速度为其电角速度为
[0045]
步骤s3、根据悬浮力产生的条件,当气隙中两个磁场的极对数差一对极并且两个磁场的电角速度相同时,电机中才能产生可控的悬浮力。由步骤s2可知,此时气隙中旋转磁场的极对数为4,故可以将悬浮绕组绕制成3对极或者5对极。
[0046]
步骤s4、考虑提出的约束条件,当气隙中旋转磁场的极对数为4满足4=6-2时,第一种绕法为悬浮绕组绕制成5对极,此时绕组会在气隙中产生极对数为5的磁场谐波,该磁场的旋转速度为其电角速度为该5次谐波经过调制块调制后会在气隙中产生极对数为10-5=5的磁场,该磁场的旋转速度为零属于静止波,其电角速度为零;此时永磁体本身产生的极对数为6的磁场和悬浮绕组经过调制块调制产生的极对数为5的磁场刚好满足极对数差一,且电角速度相同都为零,可以产生平稳的悬浮力,此外永磁体经过调制块调制产生的极对数为4的磁场和悬浮绕组本身产生的极对数为7的磁场刚好满足极对数差一,且电角速度相同都为10ωr,可以产生平稳的悬浮力,但此时永磁体本身产生的极对数为6的磁场和悬浮绕组本身产生的极对数为5的磁场满足极对数差一,但两个磁场的电角速度不相同,前者电角速度为零,后者电角速度为10ωr,两个磁场会产生悬浮力脉动,悬浮绕组绕制为5对极为图4所示,此时电机的悬浮力如图5所示,可见此时电机悬浮力脉动很大,电机不能产生平稳的悬浮力。综上,在此种情况下,当悬浮绕组绕制成5对极时,电机会产生有很大悬浮力脉动的悬浮力,不能产生较平稳的悬浮力。第二种绕法为悬浮绕组绕制成3对极,此时绕组会在气隙中产生极对数为3的磁场谐波,该磁场的旋转速度为其电角速度为该3次谐波经过调制块调制后会在气隙中产生极对数为10-3=7的磁场,该磁场的旋转速度为零属于静止波,其电角速度为零;此时永磁体本身产生的极对数为6的磁场和悬浮绕组经过调制块调制产生的极对数为7的磁场刚好满足极对数差一,且电角速度相同都为零,可以产生平稳的悬浮力,此外永磁体经过调制块调制产生的极对数为4的磁场和悬浮绕组本身产生的极对数为3的磁场刚好满足极对数差一,且电角速度相同都为10ωr,可以产生平稳的悬浮力,综上,当悬浮绕组绕制成3对极时,电机会产生较平稳的悬浮力,悬浮绕组绕制为3对极为图6所示,此时电机的悬浮力如图7所示,可见此时电机悬浮力脉动较小,电机产生平稳的悬浮力。
[0047]
综上所属,若不增加考虑本发明提出的约束条件,按照传统悬浮电机的设计方式,悬浮绕组绕制为5对极不能实现稳定悬浮。本发明提出的约束条件设计出的绕组可以实现双边电机的稳定悬浮。
[0048]
以上所述仅是本发明的优选实施方式,对于其他齿槽配合的双边电机也可以采用该方案设计悬浮绕组,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。