1.本发明涉及马达控制装置、电动车辆以及马达控制方法。
背景技术:
2.在马达的控制装置中,已知有对由两组多相绕组群构成的多相交流马达配备与两组绕组群相对应的2个系统的逆变器来控制对各绕组群的通电的控制装置。
3.专利文献1中记载有一种装置,其具备2个系统的逆变器和控制部,所述2个系统的逆变器对应于两组多相绕组群而电独立地加以设置,对两组多相绕组群输出交流电压,所述两组多相绕组群构成多相交流马达的定子而使转子产生旋转磁场,所述控制部对施加至两组多相绕组群的交流电压的相位差进行控制,控制部对相位差设定包含能减少特定次数的谐波分量的基准相位差的控制范围,根据多相交流马达的要求特性或者以使多相交流马达的通电产生波动的方式在控制范围内改变相位差。现有技术文献专利文献
4.专利文献1:日本专利特开2015-213407号公报
技术实现要素:
发明要解决的问题
5.上述专利文献1记载的装置无法充分抑制马达中产生的振动和噪音。解决问题的技术手段
6.本发明的马达控制装置是一种具备控制马达的冗余系统的第1逆变电路及第2逆变电路、和控制所述第1逆变电路及所述第2逆变电路的控制部的马达控制装置,其中,所述第1逆变电路根据使用第1载波信号生成的pwm信号将所述直流电转换为所述交流电,所述第2逆变电路根据使用第2载波信号生成的pwm信号将所述直流电转换为所述交流电,所述控制部以所述马达的磁路所引起的电磁力的脉动为基准来分别移动所述第1载波信号及所述第2载波信号的相位。本发明的马达控制方法是一种马达控制装置中的马达控制方法,所述马达控制装置具备控制马达的冗余系统的第1逆变电路及第2逆变电路、和控制所述第1逆变电路及所述第2逆变电路的控制部,其中,由所述第1逆变电路根据使用第1载波信号生成的pwm信号将所述直流电转换为所述交流电,由所述第2逆变电路根据使用第2载波信号生成的pwm信号将所述直流电转换为所述交流电,由所述控制部以所述马达的磁路所引起的电磁力的脉动为基准来分别移动所述第1载波信号及所述第2载波信号的相位。发明的效果
7.根据本发明,能够抑制马达中产生的振动和噪音。
附图说明
8.图1为配备有马达控制装置的马达驱动系统的整体构成图。图2的(a)(b)(c)(d)为表示不运用本实施方式的情况下的转矩脉动的图。图3的(a)(b)(c)(d)为表示运用本实施方式的情况下的转矩脉动的图。图4的(a)(b)为表示马达脉动图的图。图5的(a)(b)为表示周向载波相位图的图。图6的(a)(b)为表示径向载波相位图的图。图7为表示马达的转速与激振频率的关系的图。图8的(a)(b)为表示电压指令的频率和载频fc的图。图9为表示马达控制装置的控制部的处理的流程图。图10的(a)(b)(c)(d)为表示运用本实施方式的情况下的转矩脉动的图。图11的(a)(b)(c)(d)为表示运用本实施方式的情况下的脉动的旋转阶次的图。图12的(a)(b)(c)(d)为表示运用本实施方式的情况下的脉动的图。图13为本实施方式中的电动车辆系统的构成图。
具体实施方式
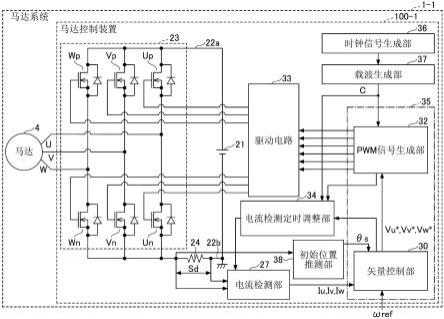
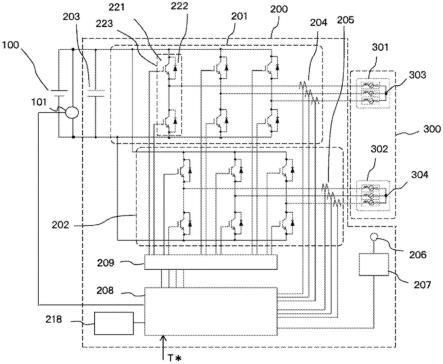
9.图1为配备有马达控制装置200的马达驱动系统的整体构成图。如图1所示,马达驱动系统具备直流电源100、马达控制装置200、马达300。马达控制装置200将从直流电源100供给的直流电转换为交流电而驱动马达300。直流电源100主要为二次电池,为锂离子电池或镍氢电池。
10.马达控制装置200具备第1逆变电路201、第2逆变电路202、平滑用电容器203、第1电流传感器204、第2电流传感器205、磁极位置传感器206、磁极位置检测器207、控制部208、pwm信号驱动电路209。
11.第1逆变电路201具有分别对应于u相、v相、w相的上臂及下臂的开关元件。开关元件由igbt 221和二极管222构成,将上臂及下臂封装成一个来构成功率模块223。开关元件也可为mosfet(金属氧化物半导体电场效应晶体管)。第1逆变电路201使用3个功率模块223来构成三相桥式电路,切换对马达300的第1系统绕组群301的各绕组的通电。功率模块223也可将三个相的上下臂合计6个开关元件做成一个封装件。
12.第2逆变电路202是以与第1逆变电路201并联的方式对直流电源100及平滑用电容器203设置的冗余系统的逆变器构成。第2逆变电路202的构成与第1逆变电路201相同,所以省略说明。第2逆变电路202使用功率模块来构成三相桥式电路,切换对马达300的第2系统绕组群302的各绕组的通电。
13.平滑用电容器203对从直流电源100输入至第1逆变电路201、第2逆变电路202的电压的脉动进行抑制而使其平滑化。在后面的说明中,有时将第1逆变电路201、第2逆变电路202统称为逆变电路201、202来进行说明。此外,电压检测器101检测直流电源100的直流电压值,并将其检测值输出至控制部208。
14.在第1逆变电路201的输出线与马达300之间设置有第1电流传感器204。在第2逆变电路202的输出线与马达300之间设置有第2电流传感器205。第1电流传感器204检测在马达300中流通的第1系统的三相交流电流iu1、iv1、iw1、(u相交流电流iu1、v相交流电流iv1以
及w相交流电流iw1)。第2电流传感器205检测在马达300中流通的第2系统的三相交流电流iu2、iv2、iw2(u相交流电流iu2、v相交流电流iv2以及w相交流电流iw2)。
15.例如使用霍耳电流传感器等来构成第1电流传感器204、第2电流传感器205。第1电流传感器204、第2电流传感器205对2个系统的三相交流电流iu1、iv1、iw1、iu2、iv2、iw2的检测结果被输入至控制部208,用于控制部208所进行的门信号的生成。另外,展示的是双重三相马达-逆变器中第1电流传感器204、第2电流传感器205在第1系统和第2系统中各由3个电流传感器构成的例子。但也可在各系统中将电流传感器设为2个,剩下一个相的交流电流则利用三相交流电流iu、iv、iw的和为零这一事实来算出。此外,也可利用插入于平滑用电容器203与逆变电路201、202之间的分流电阻等来检测从直流电源100流入逆变电路201、202的脉冲状的直流电流。继而,根据该直流电流和从逆变电路201、202施加至马达300的2个系统的三相交流电压vu1、vv1、vw1、vu2、vv2、vw2来求2个系统的三相交流电流iu1、iv1、iw1、iu2、iv2、iw2。
16.马达300上安装有用于检测磁位置θ的磁极位置传感器206。关于磁极位置传感器206,由铁心和绕组构成的旋转变压器更佳,但也可为gmr传感器等使用磁阻元件或霍耳元件的传感器。
17.来自磁极位置传感器206的信号被输入至磁极位置检测器207。磁极位置检测器207根据输入的信号来运算磁极位置θ。再者,磁极位置检测器207也可不使用来自磁极位置传感器206的输入信号而是使用流至马达300的2个系统的三相交流电流iu1、iv1、iw1、iu2、iv2、iw2或者从逆变电路201、202施加至马达300的2个系统的三相交流电压vu1、vv1、vw1、vu2、vv2、vw2来推断磁位置θ。
18.来自第1电流传感器204及第2电流传感器205的电流值和来自磁极位置检测器207的磁位置θ被输入至控制部208,进一步地,来自省略了图示的上位控制器等的与目标转矩相应的转矩指令值t*被输入至控制部208。磁位置θ在通过由控制部208根据马达300的感应电压的相位而生成门信号来进行的交流电的相位控制中加以利用。控制部208根据这些输入的信息来进行pwm控制,由此生成用于驱动马达300的pwm信号,并输出至pwm信号驱动电路209。
19.pwm信号驱动电路209根据从控制部208输入的pwm信号来生成用于控制第1逆变电路201及第2逆变电路202所具有的各开关元件的门信号,并输出至逆变电路201、202。
20.逆变电路201、202按照从pwm信号驱动电路209输入的门信号来分别控制开关元件,由此将从直流电源100供给的直流电转换为交流电而输出至马达300。平滑用电容器203使从直流电源100供给至逆变电路201、202的直流电平滑化。
21.马达300是由从逆变电路201、202供给的交流电加以旋转驱动的同步马达,具有定子及转子。马达300的定子中设置有第1系统绕组群301和第2系统绕组群302这2个系统的三相绕组。交流电从第1逆变电路201输入至第1系统绕组群301,对构成第1系统绕组群301的各绕组导通三相交流电流iu1、iv1、iw1,在各绕组中产生电枢磁通。
22.同样地,交流电从第2逆变电路202输入至第2系统绕组群302,对构成第2系统绕组群302的绕组导通三相交流电流iu2、iv2、iw2,在各绕组中产生电枢磁通。在这2个系统的各绕组中产生的电枢磁通的合成磁通与转子中配置的永磁铁的磁铁磁通之间产生吸引力和斥力,由此在转子中产生转矩,使得转子被旋转驱动。
23.图1中,控制部208、pwm信号驱动电路209各展示了一个,但也可按每一逆变电路201、202来具有pwm信号驱动电路并具有一个控制部208。进一步地,也可按每一逆变电路201、202来分别具有pwm信号驱动电路209和控制部208。
24.控制部208从省略了图示的上位控制器等接收转矩指令值t*,根据该转矩指令值t*来运算第1系统、第2系统各自的逆变电路201、202应通电的电流的电流相位。进一步地,控制部208以第1系统、第2系统各自的逆变电路201、202所通电的电流变为所期望的电流相位的方式运算电压指令值,根据第1系统、第2系统各自的三相电流指令值来生成pwm信号,并输出至pwm信号驱动电路209。pwm信号驱动电路209根据接收到的pwm信号来生成门信号,对逆变电路201、202的开关元件进行驱动。
25.此外,存储各种图谱的存储部218连接于控制部208。控制部208以马达300的磁路所引起的电磁力的脉动为基准来移动分别控制第1逆变电路201及第2逆变电路202的动作用的pwm信号的生成中使用的pwm载波信号的相位,详情于后文叙述。这时,参考预先存储在存储部218内的图谱来进行处理。控制部208例如为微型计算机。也可将存储部218设置在控制部208内部。
26.关于马达300的驱动,本来较理想为以正弦波电流进行驱动,但进行可变速运转的马达300须根据马达300的转速来控制从逆变电路201、202流至马达300的电流的频率,所以进行可变速运转的马达300大多由逆变电路201、202加以驱动。
27.控制部208所进行的pwm控制根据pwm信号的生成中使用的pwm载波信号的频率(载频)的控制形态的差异而分类为2个方式。具体而言,有与流至马达300的电流的频率无关而载频固定的非同步pwm控制和以载频相对于流至马达300的电流的频率而成整数倍的方式加以控制的同步pwm控制。在使用非同步pwm控制使马达300高转速驱动的情况下,流至马达300的电流波形不会成为三相对称波形,从而导致马达300的电磁力脉动。在使用同步pwm控制的情况下,流至马达300的电流波形成为三相对称波形,所以与非同步pwm控制相比,能期待马达300的电磁力脉动的减少效果。
28.马达300所产生的电磁力的脉动是由于从逆变电路201、202对马达300流通电流而在转子中产生的电磁力的变化。马达300所产生的电磁力的脉动大致分为马达300的周向上产生的脉动分量即转矩脉动和马达300的径向上产生的脉动分量即电磁激振力。作为马达300中的电磁力的脉动的产生因素,主要为依存于由马达300的定子的铁心、定子的线圈、转子的铁心、转子的磁铁构成的马达磁路的形状而产生的电磁力的变化和由于因逆变电路201、202的控制而包含在从逆变电路201、202通往马达300的线圈的电流中的谐波而产生的电磁力的变化这两者。
29.高转速的马达300通常会进行磁场削弱控制,所以,即便是同一转矩,磁路所引起的电磁力的脉动的大小和相位也不一样。进而,磁场削弱的大小还依存于直流电源100的直流电压。从逆变电路201、202通往马达300的线圈的电流中包含的谐波分量的产生的主要原因在于,逆变电路201、202的控制是通过pwm控制来进行,电压是借助pwm信号而非正弦波来施加。该pwm信号的脉冲振幅依存于直流电压。
30.此处,在对定子中配备有中性点303、304独立的2个系统的绕组的马达300连接2个系统的逆变电路201、202来进行驱动的马达驱动系统中,电磁力的脉动由配备有2个系统的绕组的马达300的磁路所引起的电磁力的脉动、第1逆变电路201的控制所引起的电磁力的
脉动、以及第2逆变电路202的控制所引起的电磁力的脉动这3个因素决定。
31.图2为在例子中展示不运用本实施方式的情况下的马达300的电磁力的脉动中的周向分量即转矩脉动的图。图2的(a)为表示作用于马达300的轴的转矩的图,图2的(b)为表示马达300的磁路所引起的电磁力的脉动的周向分量的图,图2的(c)为表示因第1逆变电路201的控制而在马达中产生的电磁力的脉动的周向分量的图,图2的(d)为表示因第2逆变电路202的控制而在马达中产生的电磁力的脉动的周向分量的图。横轴表示电角度,纵轴表示转矩。再者,图2的(b)、图2的(c)以及图2的(d)中展示的是马达300中的各因素造成的电磁力的脉动的周向分量即转矩脉动。
32.由于图2的(b)所示的马达300的磁路所引起的电磁力的脉动的周向分量、图2的(c)所示的第1逆变电路201的控制所引起的电磁力的脉动的周向分量、以及图2的(d)所示的第2逆变电路202的控制所引起的电磁力的脉动的周向分量的加入,如图2的(a)所示,产生马达300的轴的转矩脉动。该转矩脉动成为马达300的振动和噪音。
33.图3为在例子中展示运用本实施方式的情况下的马达300的电磁力的脉动中的周向分量即转矩脉动的图。图3的(a)为表示马达300的轴的转矩的图,图3的(b)为表示马达300的磁路所引起的电磁力的脉动的周向分量的图,图3的(c)为表示第1逆变电路201的控制所引起的电磁力的脉动的周向分量的图,图3的(d)为表示第2逆变电路202的控制所引起的电磁力的脉动的周向分量的图。横轴表示电角度,纵轴表示转矩。再者,与图2一样,图3的(b)、图3的(c)以及图3的(d)中也是展示的马达300中的各因素造成的电磁力的脉动的周向分量即转矩脉动。
34.在本实施方式中,通过后文叙述的控制来调整3个因素的电磁力的脉动的相位,由此谋求马达300最终产生的转矩脉动的减少。这3个要素的电磁力的脉动中的可控要素是第1逆变电路201的控制所引起的电磁力的脉动和第2逆变电路202的控制所引起的电磁力的脉动。控制部208以马达300的磁路所引起的电磁力的脉动为基准来调整第1逆变电路201的控制所引起的电磁力的脉动的相位θ
i1
还有第2逆变电路202的控制所引起的电磁力的脉动的相位θ
i2
。关于第1逆变电路201的控制所引起的电磁力的脉动的相位θ
i1
的调整,是调整用于控制第1逆变电路201的pwm信号的生成中使用的pwm载波信号的相位(载波相位θ
c1
)来进行。关于第2逆变电路202的控制所引起的电磁力的脉动的相位θ
i2
的调整,是调整用于控制第2逆变电路202的pwm信号的生成中使用的pwm载波信号的相位(载波相位θ
c2
)来进行。
35.如图3的(c)所示,例如将第1逆变电路201的控制所引起的电磁力的脉动相对于图3的(b)所示的马达300的磁路所引起的电磁力的脉动而移动例如20度。进一步地,例如将图3的(d)所示的第2逆变电路202的控制所引起的电磁力的脉动相对于图3的(b)所示的马达300的磁路所引起的电磁力的脉动而移动例如40度。由此,如图3的(a)所示,能够抑制马达300的轴的转矩中产生的脉动,从而能抑制马达300的振动和噪音。
36.再者,上文中对分别调整载波相位θ
c1、
θ
c2
而调整第1逆变电路201的控制所引起的电磁力脉动中的周向分量的相位θ
i1
和第2逆变电路202的控制所引起的电磁力脉动中的周向分量的相位θ
i2
、由此减少马达300中产生的电磁力脉动的周向分量即转矩脉动的情况进行了说明。此处,对于马达300中产生的电磁力脉动的径向分量即电磁激振力也能进行同样的控制。即,可以分别调整载波相位θ
c1、
θ
c2
而调整第1逆变电路201的控制所引起的电磁力脉动中的径向分量的相位和第2逆变电路202的控制所引起的电磁力脉动中的径向分量的相
位,由此减少马达300中产生的电磁力脉动的径向分量即电磁激振力。
37.图4的(a)、图4的(b)为表示马达脉动图的图。图4的(a)为马达300的周向分量用的电磁力的脉动图,图4的(b)为马达300的径向分量用的电磁力的脉动图。均预先存储在存储部218内。
38.如图4的(a)所示,马达300的周向分量用的电磁力的脉动图是将控制马达300时的电流指令值id、iq与马达300的磁路所引起的电磁力的脉动的相位θ
tr
关联而成的图谱。该图谱分别对应于直流电源100的直流电压vdc1、vdc2、vdc3加以设定。再者,为方便说明,图4的(a)中图示的是针对3个直流电压vdc1、vdc2、vdc3而设定周向分量用的马达脉动图的例子,但只要对应于多个直流电压而设定有周向分量用的马达脉动图即可,也可为3个以外。
39.如图4的(b)所示,马达300的径向分量用的电磁力的脉动图是将控制马达300时的电流指令值id、iq与马达300的磁路所引起的脉动的相位θ
tr
关联而成的图谱。该图谱分别对应于直流电源100的直流电压vdc1、vdc2、vdc3加以设定。再者,为方便说明,图4的(b)中图示的是针对3个直流电压vdc1、vdc2、vdc3而设定径向分量用的马达脉动图的例子,但只要对应于多个直流电压而设定有径向分量用的马达脉动图即可,也可为3个以外。
40.图4的(a)、图4的(b)所示的马达脉动图是预先使用实验值或设计值来存储好。例如,使图1所示的马达驱动系统动作,在直流电源100的直流电压vdc1的情况下,求出某一电流指令值id、iq和该情况下的马达300的磁路所引起的电磁力的脉动的相位θ
tr
并做成图谱。继而,将电流指令值id、iq作各种变更而求出各自的电磁力脉动的相位θ
tr
,并做成图谱。以下一样,变更直流电源100的直流电压并做成图谱。在该情况下,根据马达300的转速来选择减少电磁力脉动的周向分量和径向分量中的哪一者。例如,在马达300的转速低的情况下,做成图4的(a)所示的周向分量用的图谱。在马达300的转速高的情况下,做成图4的(b)所示的径向分量用的图谱。另外,马达脉动图还预先存储好基于电流指令值id、iq的马达300的磁路所引起的电磁力的脉动(周向上产生的转矩脉动和径向上产生的电磁激振力)的大小和针对马达300的电角度的基准相位。
41.控制部208在参考存储部218内的图谱时,在马达300的转速低的情况下,参考图4的(a)所示的周向分量用的图谱来求与电流指令值id、iq相对应的电磁力脉动的相位θ
tr
。在马达300的转速高的情况下,参考图4的(b)所示的径向分量用的图谱来求与电流指令值id、iq相对应的电磁力脉动的相位θ
tr
。
42.图5的(a)、图5的(b)为表示周向载波相位图的图。图5的(a)为第1逆变电路201的第1周向分量用的载波相位图,图5的(b)为第2逆变电路202的第2周向分量用的载波相位图。均预先存储在存储部218内。
43.如图5的(a)所示,第1逆变电路201的第1周向分量用的载波相位图是将控制马达300时的电流指令值id、iq与用于减少第1逆变电路201的控制所引起的电磁力脉动的周向分量的载波相位θ
c1
关联而成的图谱。如图5的(b)所示,第2逆变电路202的第2周向分量用的载波相位图是将控制马达300时的电流指令值id、iq与用于减少第2逆变电路202的控制所引起的电磁力脉动的周向分量的载波相位θ
c2
关联而成的图谱。这些图谱分别对应于直流电源100的直流电压vdc1、vdc2、vdc3加以设定。再者,为方便说明,图5的(a)、图5的(b)中图示的是针对3个直流电压vdc1、vdc2、vdc3而分别设定第1周向分量用的载波相位图和第2周向分量用的载波相位图的例子,但只要对应于多个直流电压而设定有这些图谱即可,也可为3
个以外。
44.图6的(a)、图6的(b)为表示径向载波相位图的图。图6的(a)为第1逆变电路201的第1径向分量用的载波相位图,图6的(b)为第2逆变电路202的第2径向分量用的载波相位图。均预先存储在存储部218内。
45.如图6的(a)所示,第1逆变电路201的第1径向分量用的载波相位图是将控制马达300时的电流指令值id、iq与用于减少第1逆变电路201的控制所引起的电磁力脉动的径向分量的载波相位θ
c1
关联而成的图谱。如图6的(b)所示,第2逆变电路202的第2径向分量用的载波相位图是将控制马达300时的电流指令值id、iq与用于减少第2逆变电路202的控制所引起的电磁力脉动的径向分量的载波相位θ
c2
关联而成的图谱。这些图谱分别对应于直流电源100的直流电压vdc1、vdc2、vdc3加以设定。再者,为方便说明,图6的(a)、图6的(b)中图示的是针对3个直流电压vdc1、vdc2、vdc3而分别设定第1径向分量用的载波相位图和第2径向分量用的载波相位图的例子,但只要对应于多个直流电压而设定有这些图谱即可,也可为3个以外。
46.另外,图5的(a)、图5的(b)的周向载波相位图以及图6的(a)、图6的(b)的径向载波相位图中的上述载波相位θ
c1
、θ
c2
是以图4的(a)、图4的(b)的马达脉动图中的相位θ
tr
为基准分别加以表示。即,马达300的磁路所引起的电磁力脉动与用于减少第1逆变电路201、第2逆变电路202的控制分别所引起的电磁力脉动的各pwm载波信号的相位差以图5的(a)、图5的(b)的周向载波相位图以及图6的(a)、图6的(b)的径向载波相位图分别加以表示。
47.图5的(a)、图5的(b)所示的周向分量的pwm载波相位图是预先使用实验值或设计值来存储好。例如,使图1所示的马达驱动系统动作,在直流电源100的直流电压vdc1的情况下,求出某一电流指令值id、iq以及减少该情况下的第1逆变电路201和第2逆变电路202的控制分别所引起的电磁力的脉动的周向分量的载波相位θ
c1
、θ
c2
并做成图谱。具体而言,不断挪动第1逆变电路201的pwm载波信号的相位,求出马达300的转矩脉动达到最小时的相位作为载波相位θ
c1
。第2逆变电路202也一样。即,只要将用于逆变电路201、202的pwm控制的pwm载波信号的相位挪到相位θ
c1
、θ
c2
,便意味着能使这些控制所引起的周向上的电磁力的脉动达到最小。继而,将电流指令值id、iq作各种变更而求出各情况下的载波相位θ
c1
、θ
c2
并做成图谱。以下一样,变更直流电源100的直流电压并做成图谱。
48.图6的(a)、图6的(b)所示的径向分量的pwm载波相位图也一样,是预先使用实验值或设计值来存储好。例如,使图1所示的马达驱动系统动作,在直流电源100的直流电压vdc1的情况下,求出某一电流指令值id、iq以及减少该情况下的第1逆变电路201和第2逆变电路202的控制分别所引起的电磁力的脉动的径向分量的载波相位θ
c1
、θ
c2
并做成图谱。继而,将电流指令值id、iq作各种变更而求出各情况下的载波相位θ
c1
、θ
c2
并做成图谱。以下一样,变更直流电源100的直流电压并做成图谱。
49.并且,在马达300的转速低的情况下,做成图5的(a)、图5的(b)所示的周向分量用的图谱。在马达300的转速高的情况下,做成图6的(a)、图6的(b)所示的径向分量用的图谱。
50.控制部208在参考存储部218内的图谱时,在马达300的转速低的情况下,参考图5的(a)、图5的(b)所示的周向分量用的图谱来求与电流指令值id、iq相对应的载波相位θ
c1
、θ
c2
。在马达300的转速高的情况下,参考图6的(a)、图6的(b)所示的径向分量用的图谱来求与电流指令值id、iq相对应的载波相位θ
c1
、θ
c2
。
51.接着,参考图7,对马达300的磁路所引起的径向的电磁力的脉动(电磁激振力)进行说明。在马达300为高转速的情况下,脉冲数/周期在高转速侧减少,所以本实施方式中使用同步pwm控制。在使用同步pwm控制的情况下,可以将马达300的磁路所引起的径向的电磁力脉动与逆变电路201、202的控制所引起的谐波电流造成的径向的电磁力脉动重叠而不管马达300的转速如何。
52.图7为表示马达300的转速与激振频率(径向的脉动的频率)的关系的图。横轴表示马达300的转速,纵轴表示激振频率。在马达300的转速达到12000rpm之前,使用非同步pwm控制,在马达300的转速超过了12000rpm的情况下,使用同步pwm控制。
53.图7中展示的是马达300为8极马达(极数p=8)的例子。此外,在图7的例子中,在非同步pwm控制下,载频fc=10khz。在同步pwm控制下,以在电压指令的每1周期形成9脉冲的pwm载波信号的方式调整载频fc。
54.首先,对马达300的磁路所引起的激振频率进行说明。将转动马达300的电角度(基波电流)设为频率f1[hz]。马达300的转速n[rpm]与电角度频率f1的关系由下式(1)表示。p为马达300的极数。f1=n/60
×
p/2[rpm]
···
(1)
[0055]
马达300的旋转6阶(电角度)的激振频率f6由下式(2)表示。马达300的旋转12阶(电角度)的激振频率f12由下式(3)表示。f6=6
×
f1[hz]
···
(2)f12=12
×
f1[hz]
···
(3)
[0056]
图7中,图示的f6为旋转6阶(电角度)的激振频率f6,图示的f12为旋转12阶(电角度)的激振频率f12。如图7所示,激振频率f6、f12从非同步pwm控制的区域跨及同步pwm控制的区域而呈直线状增加。再者,载频fc在非同步pwm控制中是固定的。
[0057]
接着,对逆变电路201、202所引起的谐波电流造成的激振频率(径向的脉动的频率)进行说明。载频fc和fc
±
3f1的边带波分量成为圆环0阶的激振频率。再者,所谓圆环0阶,是马达300的径向的脉动的旋转阶次。将因马达300的气隙而产生的电磁力的径向分量而且是在半径方向上一致地发生时间变化的径向分量称为圆环0阶模态。在本实施方式中,以圆环0阶的径向脉动为对象来减少马达300的径向上的电磁力的脉动。
[0058]
在非同步pwm控制的情况下,例如若马达300的转速为6000rpm,则fc
±
3f1成为下式(4)、下式(5)。fc 3f1=10000 3
×
6000/60
×
8/2=11200[hz]
···
(4)fc-3f1=10000-3
×
6000/60
×
8/2=8800[hz]
···
(5)
[0059]
在同步pwm控制的情况下,若在电压指令的每1周期设为9脉冲的pwm载波信号,则载频fc由下式(6)表示。因此,边带分量分别成为下式(7)、(8)。fc=9
×
f1[hz]
···
(6)fc 3f1=9
×
f1 3
×
f1=12
×
f1[hz]
···
(7)fc-3f1=9
×
f1-3
×
f1=6
×
f1[hz]
···
(8)
[0060]
如图7所示,在同步pwm控制的情况下,马达300的磁路所引起的径向上的电磁力的
脉动的频率f6、f12与逆变电路201、202的控制所引起的径向上的电磁力的脉动的频率fc 3f1、fc-3f1重叠。如此,马达300的磁路所引起的径向的电磁力脉动与逆变电路201、202的控制所引起的径向的电磁力脉动变为相同频率,所以,通过借助后文叙述的控制来移动逆变电路201、202的控制所引起的径向的电磁力脉动的相位,能够抵消马达300的磁路所引起的电磁激振力。
[0061]
图8为表示电压指令的频率和载频fc的图,图8的(a)展示第1逆变电路201的波形,图8的(b)展示第2逆变电路202的波形。各图的左侧展示马达300的转速为低转速的情况,各图的右侧展示马达300的转速为高转速的情况。
[0062]
图1所示的控制部208的控制为同步pwm控制,控制部208控制电压指令的频率和载频fc。电压指令的频率为转动马达300的电角度(基波电流)的频率f1[hz]。如图8的(a)、图8的(b)的左侧所示,在低转速下,以在电压指令的频率f1的每1周期形成9脉冲的pwm载波信号的方式控制载频fc。如图8的(a)、图8的(b)的右侧所示,在高转速下也一样,以在电压指令的频率f1的每1周期形成9脉冲的pwm载波信号的方式控制载频fc。第1逆变电路201的波形与第2逆变电路202的波形为同样的波形。该例中对在电压指令的频率f1的每1周期形成9脉冲的pwm载波信号的例子进行了说明,而pwm载波信号的频率只要为电压指令的频率的整数倍即可。尤其较佳为以该整数倍为奇数的整数倍的方式进行控制,此外,较佳为以成为3的倍数的整数倍的方式进行控制。
[0063]
即,控制部208与驱动马达300的电压指令的频率f1同步地以第1逆变电路201及第2逆变电路202的pwm控制中分别使用的pwm载波信号的频率变为驱动马达300的电压指令的频率的整数倍的方式调整载频fc。通过如此调整载频,在使用同步pwm控制的情况下,可以将马达300的磁路所引起的电磁力的脉动与逆变电路201、202的控制所引起的电磁力的脉动重叠而不管马达300的转速如何。于是,两种脉动变为相同频率,所以,通过借助后文叙述的控制来移动逆变电路201、202的控制所引起的电磁力的脉动的相位,能够抵消马达300的磁路所引起的电磁力的脉动。
[0064]
图9为表示马达控制装置200的控制部208的处理的流程图。图9所示的流程图是每隔一定时间或者每当输入转矩指令值t*时加以执行。再者,可以利用配备有cpu、存储器等的计算机来执行该流程图中展示的程序。也可利用硬件逻辑电路来实现全部处理或一部分处理。进一步地,该程序可以预先储存在马达控制装置200的存储介质中来加以提供。或者,也可以将程序储存在独立的存储介质中来加以提供,或者通过网络线路将程序记录、储存至马达控制装置200的存储介质。也能以数据信号(载波)等各种形态的计算机可读入的电脑程序产品的形式加以供给。
[0065]
在图9的步骤s901中,控制部208从上位控制器等接收转矩指令值t*。继而,在步骤s902中,控制部208利用收到的转矩指令值t*来制作电流指令值id、iq。
[0066]
接着,在步骤s903中,控制部208像参考图8的(a)、图8的(b)而说明过的那样以pwm载波信号的频率变为电压指令的频率的整数倍的方式进行调整。此时,例如整数倍较理想调整为奇数的整数倍,此外,较理想调整为3的倍数的整数倍。
[0067]
接着,在步骤s904中,控制部208选择要减少的脉动分量。即,在马达300的转速低于规定值的情况下选择周向分量,在马达300的转速为规定值以上的情况下选择径向分量。马达300的转速的值是根据来自磁极位置检测器207的旋转位置θ进行判定。换句话说,控制
部208根据马达300的转速,来选择马达300的磁路所引起的电磁力脉动中的周向上产生的转矩脉动和马达300的磁路所引起的电磁力脉动中的径向上产生的电磁激振力中的一方。
[0068]
继而,在步骤s905中,控制部208检索存储部218中存储的马达脉动图。像已说明过的那样,马达脉动图有图4的(a)所示的周向分量用的图谱和图4的(b)所示的径向分量用的图谱。由于在步骤s904中选择了要减少的脉动分量,所以检索与所选择的脉动分量相对应的图谱。在进行检索之前,控制部208利用电压检测器101来检测直流电源100的直流电压值。即,在转速低于规定值的情况下,根据电流指令值id、iq来检索图4的(a)所示的3个周向分量用的图谱当中与检测到的直流电源100的直流电压值相对应的图谱,获取马达300的磁路所引起的电磁力的脉动的相位θ
tr
。在转速为规定值以上的情况下,根据电流指令值id、iq来检索图4的(b)所示的3个径向分量用的图谱当中与检测到的直流电源100的直流电压值相对应的图谱,获取马达300的磁路所引起的电磁力的脉动的相位θ
tr
。通常而言,直流电源100的直流电压的变化会使得马达300的磁路所引起的电磁力的脉动的振幅发生变化。在本实施方式中,由于参考针对多个直流电压值预先设定的马达脉动图当中与由电压检测器101检测到的直流电压值相对应的图谱,所以也能应对振幅的变化。
[0069]
在步骤s906中,控制部208利用步骤s905中检索到的相位θ
tr
来推断马达300的磁路所引起的脉动的相位。下面,参考图10进行说明。
[0070]
图10为表示运用本实施方式的情况下的转矩脉动的图。图10的(a)为表示马达300的磁位置的图,横轴表示时间,纵轴表示电角度。图10的(b)为马达300的轴的转矩,横轴表示时间,纵轴表示转矩。图10的(c)为表示第1逆变电路201的pwm载波信号及电压指令的图,图10的(d)为表示第2逆变电路202的pwm载波信号及电压指令的图,横轴表示时间,纵轴表示电压。
[0071]
如图10的(a)所示,马达300的磁位置随着马达300的旋转而按电角度360度这一周期发生变化,旋转角0度成为基准位置。如图10的(b)所示,马达300的轴的转矩中出现的马达300的磁路所引起的电磁力的脉动在三相的马达300中是以电角度每1周期6n倍(n=6、12、18、
···
)的频率产生。马达300的磁路所引起的电磁力的脉动由电流指令值id、iq决定,所以须确认与马达300的基准位置的偏移量。
[0072]
控制部208使用马达300上安装的磁极位置检测器207的检测信号以及对马达300的电流指令值来推断马达300的磁路所引起的脉动的相位。由于可以推断出对应于马达300的旋转角的磁路所引起的电磁力的脉动,因此可以像后文叙述那样以此为基准而像图10的(c)、图10的(d)所示那样调整载波相位θ
c1
及θ
c2
。
[0073]
返回图9所示的流程图的说明。在图9的步骤s907中,控制部208检索存储部218中存储的载波相位图。像已说明过的那样,载波相位图有图5的(a)、图5的(b)所示的周向载波相位图和图6的(a)、图6的(b)所示的径向载波相位图。
[0074]
由于在步骤s904中选择了要减少的脉动分量,所以检索与所选择的脉动分量相对应的图谱。在进行检索之前,控制部208利用电压检测器101来检测直流电源100的直流电压值。即,在转速低于规定值的情况下,根据电流指令值id、iq来分别检索图5的(a)、图5的(b)分别所示的3个周向分量用的图谱当中与检测到的直流电源100的直流电压值相对应的图谱,获取载波相位θ
c1
、θ
c2
。在转速为规定值以上的情况下,根据电流指令值id、iq来分别检
索图6的(a)、图6的(b)分别所示的3个径向分量用的图谱当中与检测到的直流电源100的直流电压值相对应的图谱,获取载波相位θ
c1
、θ
c2
。
[0075]
通常而言,直流电源100的直流电压的变化会使得逆变电路201、202的控制所引起的电磁力的脉动的振幅发生变化。在本实施方式中,即便逆变电路201、202的控制所引起的电磁力的脉动的振幅发生变化,也可以通过调整它们的相位来确保与马达300的磁路所引起的电磁力的脉动叠合时的转矩脉动、电磁激振力的减少效果。即,根据施加至第1逆变电路201及第2逆变电路202的直流电压值而像后文叙述的那样调整pwm载波信号的相位的移动量。
[0076]
在图9的步骤s908中,控制部208以马达300的磁路所引起的电磁力的脉动为基准将针对第1逆变电路201的pwm载波信号作相位θ
c1
程度的移动。进而,以马达300的磁路所引起的电磁力的脉动为基准将针对第2逆变电路202的pwm载波信号作相位θ
c2
程度的移动。
[0077]
继而,在步骤s909中,控制部208驱动第1逆变电路201及第2逆变电路202而对马达300输出交流电压。
[0078]
如此,借助第1逆变电路及第2逆变电路所流通的各自的谐波电流的合成波、以马达300的磁路所引起的电磁力的脉动为基准来移动pwm载波信号的相位。结果,能够抑制马达300的磁路所引起的脉动。
[0079]
图3的(c)中展示了将第1逆变电路201的控制所引起的电磁力的脉动移动20度的例子,图3的(d)中展示了将第2逆变电路202的控制所引起的电磁力的脉动移动40度的例子。如此,第1逆变电路201的控制所引起的电磁力的脉动的相位θ
i1
的调整是调整第1逆变电路201的载波相位θ
c1
来进行。第2逆变电路202的控制所引起的电磁力的脉动的相位θ
i2
的调整是调整第2逆变电路202的载波相位θ
c2
来进行。由此,如图3的(a)所示,能够抑制马达300的轴向上产生的转矩脉动和马达300的径向上产生的电磁激振力,从而能抑制马达300的振动和噪音。
[0080]
在本实施方式中,根据马达300的转速来分别选择使用图4的(a)、图4的(b)所示的马达脉动图,图5的(a)、图5的(b)所示的周向载波相位图,图6的(a)、图6的(b)所示的径向载波相位图。即,根据马达300的转速来选择马达300的磁路所引起的脉动的周向上产生的转矩脉动和马达300的磁路所引起的脉动的径向上产生的电磁激振力中的一方,以使所选择的转矩脉动或电磁激振力减少的方式移动pwm载波信号的相位。由此,虽然因马达300的转速而使得周向上产生的转矩脉动和径向上产生的电磁激振力中的哪一方导致振动这一情况发生变化,但能够减少影响大的一方的脉动而减少振动。
[0081]
在本实施方式中,根据由电压检测器101检测到的直流电源100的直流电压值来分别选择使用图4的(a)、图4的(b)所示的马达脉动图,图5的(a)、图5的(b)所示的周向载波相位图,图6的(a)、图6的(b)所示的径向载波相位图。即,根据施加至第1逆变电路201及第2逆变电路202的直流电压来调整wm载波信号的相位的移动量。由此,虽然因直流电源100的直流电压的变化而使得第1逆变电路201及第2逆变电路202的控制所引起的电磁力的脉动的振幅发生变化,但即便这些振幅发生变化,也能确保与马达300的磁路所引起的电磁力的脉动叠合时的转矩脉动、电磁激振力的减少效果。
[0082]
接着,参考图11,对脉动的旋转阶次进行说明。图11的(a)为表示马达300的磁位置的图,横轴表示时间,纵轴表示电角度。图11的
(b)为马达300的轴的转矩脉动,横轴表示时间,纵轴表示转矩。图11的(c)为表示转矩脉动的电角度6阶分量的图,图11的(d)为表示转矩脉动的电角度12阶分量的图,横轴表示时间,纵轴表示转矩。
[0083]
图11的(b)所示的马达300的轴的转矩脉动展示了马达300的磁路所引起的电磁力的脉动。通过参考磁极位置检测器403,可以确认马达300的转子在电角度上处于几度的位置。若将图11的(b)所示的马达300的磁路所引起的电磁力的脉动切取图11的(a)所示的电角度一个周期(360度)来进行分量分析,则变为图11的(c)、图11的(d)的样子。即,图11的(c)的波形是电角度一周期(360度)内有6次电磁力的脉动、相对于电角度一圈而发生6次脉动,所以称为电角度6阶分量。图11的(d)的波形是电角度一周期(360度)内有12次电磁力的脉动、相对于电角度一圈而发生12次脉动,所以称为电角度12阶分量。
[0084]
接着,对减少电角度6阶分量的电磁力的脉动的控制进行说明。图12为表示运用本实施方式的情况下的脉动的图。图12的(a)为表示马达300的轴的转矩的图,图12的(b)为表示马达300的磁路所引起的电磁力的脉动的图,图12的(c)为表示第1逆变电路201的控制所引起的电磁力的脉动的图,图12的(d)为表示第2逆变电路202的控制所引起的电磁力的脉动的图。横轴表示电角度,纵轴表示转矩。
[0085]
在减少电角度6阶分量的电磁力的脉动的控制中,进行与参考图9而说明过的步骤s901~s907、s909同样的处理,而在图9的步骤s908中,进行以下处理。
[0086]
如图12的(c)所示,控制部208以马达300的磁路所引起的电磁力的脉动为基准将第1逆变电路201的控制所引起的电磁力的脉动的相位θ
i1
移动30度。进而,如图12的(d)所示,控制部208以马达300的磁路所引起的电磁力的脉动为基准将第2逆变电路202的控制所引起的电磁力的脉动的相位θ
i2
移动30度。
[0087]
由此,如图12的(a)所示,能够减少马达300的轴的转矩中产生的脉动的电角度6阶分量,从而能抑制马达300的振动和噪音。
[0088]
接着,对减少电角度6阶分量及电角度12阶分量的电磁力的脉动的控制进行说明。像已叙述过的那样,图3为表示运用本实施方式的情况下的马达300的电磁力的脉动的图。
[0089]
在减少电角度6阶分量及电角度12阶分量的电磁力的脉动的控制中,进行与参考图9而说明过的步骤s901~s907、s909同样的处理,而在图9的步骤s908中,进行以下处理。
[0090]
如图3的(c)所示,控制部208以马达300的磁路所引起的电磁力的脉动为基准将第1逆变电路201的控制所引起的电磁力的脉动的相位θ
i1
移动20度。进一步地,如图3的(d)所示,控制部208以马达300的磁路所引起的电磁力的脉动为基准将第2逆变电路202的控制所引起的电磁力的脉动的相位θ
i2
移动40度。
[0091]
由此,如图3的(a)所示,能够减少马达300的轴的转矩中产生的脉动的电角度6阶分量及电角度12阶分量,从而能抑制马达300的振动和噪音。
[0092]
图13为本实施方式中的电动车辆系统的构成图。如图13所示,电动车辆系统具有将马达300用作电动发电机的动力传动系,使用马达300的旋转驱动力来行驶。再者,电动车辆系统是以混合动力系统为例进行说明。
[0093]
图13中,在电动车辆800的前部可旋转地轴颈支承有前轮车轴801,在前轮车轴801的两端设置有前轮802、803。在电动车辆800的后部可旋转地轴颈支承有后轮车轴804,在后
轮车轴804的两端设置有后轮805、806。
[0094]
在前轮车轴801的中央部设置有作为动力分配机构的差速器811,将从发动机810经由变速器812传递的旋转驱动力分配给左右前轮车轴801。
[0095]
关于发动机810和马达300,设置在发动机810的曲轴上的带轮与设置在马达300的转轴上的带轮通过皮带而以机械方式连结在一起。由此,马达300的旋转驱动力能传递至发动机810,发动机810的旋转驱动力能传递至马达300。马达300中,由内置有逆变电路201、202的马达控制装置200控制的三相交流电被供给至定子的线圈,由此使得转子旋转而产生与三相交流电相应的旋转驱动力。马达控制装置200为本实施方式中于上文叙述过的装置。
[0096]
即,马达300由马达控制装置200控制而作为电动机进行动作,另一方面,接受发动机810的旋转驱动力而使得转子旋转,由此在定子的线圈中感应出电动势,从而作为产生三相交流电的发电机进行动作。
[0097]
马达控制装置200是将从作为高压电池的直流电源100供给的直流电转换为三相交流电的功率变换装置,按照运转指令值来控制与磁位置相应的、流至马达300的定子线圈的三相交流电流。
[0098]
由马达300发出的三相交流电被马达控制装置200转换为直流电而对直流电源100进行充电。直流电源100经由dc-dc转换器824与低压电池823电连接。低压电池823构成电动车辆800的低电压(14v)系电源,用于使发动机810初始起动(冷起动)的起动机825、收音机、灯等的电源。
[0099]
通常而言,马达300的振动、噪音是因电磁力而产生的激振力在马达300主体和所安装的结构物中传递而摇动各部、由此产生振动噪音。此外,在结构物的固有模态及频率与激振力的激振模态和频率相重叠的情况下,成为共振状态而导致振动噪音被放大。在本实施方式中,能够减少马达300的振动、噪音,进而减少搭载有马达300的电动车辆800的振动、噪音。
[0100]
根据以上说明过的实施方式,获得以下作用效果。(1)马达控制装置200具备控制马达300的冗余系统的第1逆变电路201及第2逆变电路202和控制第1逆变电路201及第2逆变电路202的控制部208,第1逆变电路201根据使用第1载波信号生成的pwm信号将直流电转换为交流电,第2逆变电路202根据使用第2载波信号生成的pwm信号将直流电转换为交流电,控制部208以马达300的磁路所引起的电磁力的脉动为基准来分别移动第1载波信号及第2载波信号的相位。由此,能够抑制马达中产生的振动和噪音。
[0101]
(2)马达控制方法是一种具备控制马达的冗余系统的第1逆变电路201及第2逆变电路202和控制第1逆变电路201及第2逆变电路202的控制部208的马达控制装置200中的马达控制方法,其中,由第1逆变电路201根据使用第1载波信号生成的pwm信号将直流电转换为交流电,由第2逆变电路202根据使用第2载波信号生成的pwm信号将直流电转换为交流电,由控制部以马达300的磁路所引起的电磁力的脉动为基准来分别移动第1载波信号及第2载波信号的相位。由此,能够抑制马达中产生的振动和噪音。
[0102]
本发明不限定于上述实施方式,只要不损害本发明的特征,在本发明的技术思想的范围内思索的其他形态也包含在本发明的范围内。符号说明
[0103]
100
…
直流电源、101
…
电压检测器、200
…
马达控制装置、201
…
第1逆变电路、202
…
第2逆变电路、203
…
平滑用电容器、204
…
第1电流传感器、205
…
第2电流传感器、206
…
磁极位置传感器、207
…
磁极位置检测器、208
…
控制部、209
…
pwm信号驱动电路、223
…
功率模块、300
…
马达、301
…
第1系统绕组群、302
…
第2系统绕组群。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。