1.本发明涉及海上火箭回收技术领域,具体涉及一种对降落在海上火箭回收平台上的火箭进行固定,并对火箭箭体内的残余燃料进行排除的火箭残余燃料回收系统。
背景技术:
2.为了促进运载火箭商业化发展,提高火箭的利用率和降低发射成本,火箭回收并重复利用是一种有效的技术手段。火箭回收的途径分为陆上回收和海上回收,相对于陆上回收,海上回收具有节省火箭燃料、回收失败影响范围小等优点。
3.火箭海上回收主要采用回收平台,回收的地点通常是在离岸较远的开敞海域,同时由于海上火箭回收失败后存在爆炸的可能,在火箭回收下落过程中不能有人员驻留在回收平台上。
4.火箭的可回收段在降落过程中,会展开自带的着陆支腿,用以缓冲降落至回收平台的冲击力并提供临时支撑。然而,由于火箭在降落过程中的不确定性,上述支腿系统可能受到损坏,存在失效的风险。同时,考虑到海上风浪的影响,在火箭降落至无人值守的回收平台后,需要使用可远程操作的封固装置迅速将其封固在回收甲板上,以防止回收平台返港过程中受风浪影响而引发火箭倾倒事故。
5.在当前技术条件下,在平台(船)上常用的封固方式为使用结构件限位或者将物体直接焊接在甲板上。但由于火箭降落的位置具有一定的偏差,并且降落过程中回收平台无人值守,因而上述封固方式均无法满足火箭回收作业的要求。并且着陆后的箭体内还存有残余的液体燃料,应及时将液体燃料泄放,以降低燃料泄漏造成火灾和爆炸的风险。现有技术中无法在无人平台上实现火箭残余推进燃料高效、安全泄放。
技术实现要素:
6.为解决上述问题,本发明提供一种海上回收火箭封固装置,旨在达到能够远程控制、自动完成对降落在海上回收平台的火箭箭体进行固定,自动且安全的将火箭箭体中的残余燃料进行排出、收集,进而对火箭箭体进行安全回收的目的,其所采用的技术方案是:
7.一种海上火箭残余燃料回收系统,其特征在于:有火箭回收平台,火箭回收平台的中心上方固定有回收甲板,箭体落在回收甲板上;回收甲板上设置有集中控制模块、封固装置及残余燃料处理系统,通过封固装置对火箭箭体封固后,利用残余燃料处理系统排出火箭箭体内残余的燃料,集中控制模块对封固装置、残余燃料处理系统进行控制;
8.封固装置带有装置平台,装置平台上固定有多个摄像头,装置平台带有电力驱动模块,装置平台的底部安装有全回转车轮,全回转车轮带有车轮驱动模块,装置平台侧壁固定有磁性固定桩;
9.装置平台上固定有一个以上的可伸缩机械臂,可伸缩机械臂通过承重轴承固定在装置平台上,承重轴承外部设置有保护壳体,承重轴承连接有旋转轴,旋转轴顶部固定连接有多级液压缸,多级液压缸的自由端连接有扶正构件;
10.在保护壳体顶部固定有大齿圈,大齿圈沿旋转轴周向设置,大齿圈与旋转轴之间存在间距,旋转轴外表面固定连接有电机,电机的电机轴与小齿圈连接,小齿圈与大齿圈齿啮合;
11.扶正构件有长方形的弧形板,弧形板中心与多级液压缸自由端连接,弧形板与多级液压钢连接处的两侧设置有开合液压,弧形板与多级液压缸连接处的下方设置有转动液压,开合液压的液压缸与多级液压缸连接,开合液压的液压杆与弧形板连接,转动液压的液压缸与多级液压缸连接,转动液压的液压缸与弧形板连接;
12.或者扶正构件有机械爪,机械爪与多级液压缸自由端连接;
13.弧形板的弧度与火箭箭体外表面弧度相适配,可伸缩机械臂带有机械臂驱动模块;集中控制模块对机械臂驱动模块、车轮驱动模块、电力驱动模块进行控制;
14.残余燃料处理系统带有氮气供给系统和煤油回收系统,煤油回收系统带有多个煤油软管卷筒,多个煤油软管卷筒沿回收甲板周向等间距设置,煤油软管卷筒上缠绕有第一煤油软管,第一煤油软管的一端依次与煤油输送泵、煤油泄放柜连接;
15.氮气供给系统带有多个氮气软管卷筒,多个氮气软管卷筒沿回收甲板周向等间距设置,氮气软管卷筒上缠绕有第一氮气软管,第一氮气软管的一端依次与氮气减压阀组、氮气瓶组连接;
16.回收甲板上设置有连接机器人,连接机器人通过集中控制模块控制,连接机器人可在回收甲板上自由移动,连接机器人带有辅助臂,辅助臂端部设置有抓手,抓手抓取第一煤油软管或第一氮气软管,第一煤油软管与箭体煤油贮箱的煤油泄放口煤油泄放口连接,第一氮气软管与箭体煤油贮箱的氮气注入口连接;
17.控制模块对氮气供给系统和煤油回收系统进行控制,集中控制模块带有的视频监控对火箭回收平台进行实时监控。
18.3.根据权利要求1所述的一种海上火箭残余燃料回收系统,其特征在于火箭残余燃料处理系统带有火箭回收平台,火箭回收平台的中心上方固定有六边形回收甲板,箭体落在回收甲板上;
19.火箭回收平台带有集中控制模块,集中控制模块对氮气供给系统和煤油回收系统进行控制,集中控制模块带有的视频监控对火箭回收平台进行实时监控,回收甲板上设置有连接机器人,连接机器人通过集中控制模块控制,连接机器人可在回收甲板上自由移动;
20.煤油回收系统带有多个煤油软管卷筒,多个煤油软管卷筒沿回收甲板周向等间距设置,煤油软管卷筒上缠绕有第一煤油软管,第一煤油软管的一端依次与煤油输送泵、煤油泄放柜连接;
21.氮气供给系统带有多个氮气软管卷筒,多个氮气软管卷筒沿回收甲板周向等间距设置,氮气软管卷筒上缠绕有第一氮气软管,第一氮气软管的一端依次与氮气减压阀组、氮气瓶组连接。
22.连接机器人带有辅助臂,辅助臂端部设置有抓手,抓手抓取第一煤油软管或第一氮气软管,第一煤油软管与箭体煤油贮箱的第二煤油软管连接,第一氮气软管与箭体煤油贮箱的第二氮气软管连接。
23.上述一种海上火箭残余燃料回收系统,更进一步地,所述磁性固定桩带有上桩体和下桩体,所述上桩体固定在所述底座侧壁上,所述上桩体内固定有液压缸,所述液压杆固
定在所述下桩体内,当所述液压杆全部缩回所述液压缸内时,所述上桩体与所述下桩体对接成一体。
24.上述一种海上火箭残余燃料回收系统,更进一步地,所述摄像头的数量是两个,分别固定在所述底座同一边的两端。
25.上述一种海上火箭残余燃料回收系统,更进一步地,所述摄像头将拍摄到的影像实时传送至集中控制模块,集中控制模块利用无线中继系统,通过海事卫星和vsat卫星与服务船控制站建立通讯。
26.上述一种海上火箭残余燃料回收系统,更进一步地,所述电力驱动模块带有外部充电接口。
27.上述一种海上火箭残余燃料回收系统,更进一步地,所述火箭封固装置位于火箭回收平台上,所述无线中继系统设置于所述火箭回收平台内。
28.上述一种海上火箭残余燃料回收系统,更进一步地,所述火箭封固装置成对使用。
29.上述一种海上火箭残余燃料回收系统,更进一步地,所述底座为长方形底座,所述磁性固定桩位于所述底座的四个底座角处,每个底座角处设置有两个所述磁性固定桩,两个所述磁性固定桩形成90
°
夹角。
30.上述一种海上火箭残余燃料回收系统,更进一步地,第一煤油软管自由端的端部、第一氮气软管自由端的端部均带有快速接头,第二煤油软管的端部、第二氮气软管的端部带有与快速接头相配合的接头阀。
31.上述一种海上火箭残余燃料回收系统,更进一步地,第一煤油软管上设置有第一遥控阀,第一氮气软管上设置有第二遥控阀,第一遥控阀、第二遥控阀通过集中控制模块控制。
32.上述一种海上火箭残余燃料回收系统,更进一步地,煤油软管卷筒上带有第一电机,氮气软管卷筒上带有第二电机,第一电机、第二电机通过集中控制模块控制。
33.上述一种海上火箭残余燃料回收系统,更进一步地,煤油软管卷筒和氮气软管卷筒的数量相同,一个煤气软管卷筒和一个氮气软管卷筒组成卷筒组,回收甲板上设置有三组卷筒组,三组卷筒组沿回收甲板周向等间距设置。
34.上述一种海上火箭残余燃料回收系统,更进一步地,煤油输送泵、煤油泄放柜、氮气减压阀组、氮气瓶组均固定在火箭回收平台上。
35.上述一种海上火箭残余燃料回收系统,更进一步地,煤油输送泵是两个,分别是第一煤油输送泵和第二煤油输送泵,煤油泄放柜是两个,分别是第一煤油泄放柜和第二煤油泄放柜。
36.第一煤油软管分别与第一煤油输送泵、第二煤油输送泵连接,第一煤油输送泵、第二煤油输送泵的输出管路汇总后依次与第一煤油泄放柜、第二煤油泄放柜连接。
37.上述一种海上火箭残余燃料回收系统,更进一步地,连接机器人带有底板,底板上固定有滑轮,底板上固定有辅助臂,辅助臂有多段机械臂,多段机械臂之间铰接,辅助臂的自由端固定有抓手。
38.本发明全程采用无线遥控方式,对降落到回收平台上的火箭箭体进行固定,固定好火箭箭体,以方便后续系列操作,无需人工行驶船舶在回收平台附近进行作业。火箭残余燃料煤油的回收在无人的火箭回收平台上遥控操作完成,避免了煤油泄漏引起火灾对人员
的伤害。煤油回收系统、氮气供给系统、软管卷筒和辅助臂设计电动遥控控制,并集成在平台集中控制模块,通过海事卫星和vsat卫星建立通讯,在服务船控制站一站式完成所有操作,系统操作效率高。
附图说明
39.图1为扶正构件是弧形板的封固装置的侧视图;
40.图2为图1的俯视图;
41.图3为大齿圈、小齿圈、旋转轴侧视结构示意图;
42.图4为大齿圈、小齿圈相配合的俯视结构示意图;
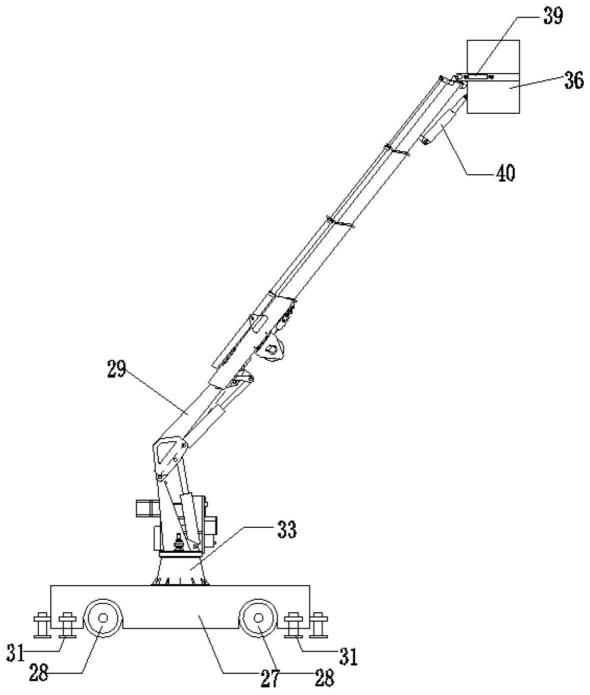
43.图5为扶正构件是机械爪的封固装置的侧视图;
44.图6为两个扶正构件是弧形板的封固装置协同工作示意图;
45.图7为扶正构件是机械爪的封固装置工作示意图;
46.图8是本发明回收火箭残余燃料处理系统图;
47.图9是本发明系统远程遥控系统图;
48.图10是本发明回收平台的俯视结构示意图;
49.图11是图10的侧视结构示意图;
50.图12是本发明软管卷筒覆盖区域示意图;
51.图13是本发明软管接头遥控连接示意图;
52.其中,1-火箭回收平台、2-回收甲板、3-箭体煤油贮箱、4
‑ꢀ
第一煤油泄放柜、5-第二煤油泄放柜、6-第一煤油输送泵、7-第二煤油输送泵、8-煤油软管卷筒、9-第一煤油软管、10-第二煤油软管、11-氮气瓶组、12-氮气减压阀组、13-第一氮气软管、14
‑ꢀ
第二氮气软管、15-氮气软管卷筒、16-箭体、17-辅助臂、18-抓手、 19-第一遥控阀、20-第二遥控阀、21-底座、22-全回转车轮、23
‑ꢀ
可伸缩机械臂、24-摄像头、25-磁性固定桩、26-扶正装置、27
‑ꢀ
装置平台、28-全回转车轮、29-可伸缩机械臂、30-限位垫圈、31
‑ꢀ
磁性固定桩、32-承重轴承、33-保护壳体、34-大齿圈、35-小齿圈、 36-扶正构件、37-旋转轴、38-电机、39-开合液压、40-转动液压。
具体实施方式
53.结合附图对本发明做进一步说明。
54.如图1、2所示,一种海上火箭残余燃料回收系统,有一个长方形装置平台,装置平台的底部安装有4个全回转车轮,四个全回转车轮分别位于装置平台的四个角处。在装置平台四角处的侧壁上,还固定有磁性固定桩,磁性固定桩带有上桩体和下桩体,上桩体固定在装置平台侧壁上,上桩体内固定有液压缸,液压杆固定在下桩体内,当液压杆全部缩回液压缸内时,上桩体与下桩体对接成一体。磁性固定桩由电力驱动,可沿垂向升降,其底部底部焊接有铁盒,盒内封装有钕铁硼磁铁,当下桩体下降并与回收甲板面接触时产生吸附力,将封固装置吸附在回收甲板上,进而利用磁力将本封固装置吸附在海上火箭回收平台的甲板上。
55.装置平台上表面中心处安装有可伸缩机械臂,可伸缩机械臂自由端的端部固定有扶正构件,扶正构件为长方形的弧形板,弧形板的弧度与火箭箭体外表面弧度相适配。弧形
板与可伸缩机械臂自由端连接处的两侧,设置有开合液压,弧形板与可伸缩机械臂自由端连接处的下方,设置有转动液压。开合液压可帮助调整弧形板横向方向上的位置,转动液压帮助调整弧形板纵向方向上的位置,进而帮助弧形板更好的与箭体外表面贴合,进而扶住箭体。
56.如图3、4所示,可伸缩机械臂固定在装置平台的中心,可伸缩机械臂带有的旋转轴通过承重轴承固定,承重轴承外设置有保护壳体,保护壳体固定在装置平台上,沿保护壳体周向等间距设置有多个加强肘板,保护壳体的顶部固定有大齿圈,大齿圈套在旋转轴外,与旋转轴存在间距,旋转轴与大齿圈之间设置有限位挡圈。旋转轴顶部固定有多级液压缸,多级液压缸的自由端固定有扶正构件。旋转轴上还固定连接有小齿圈,小齿圈带有电机,电机与旋转轴固定连接,电机的电机轴与小齿圈连接,大齿圈与小齿圈齿啮合,电机轴带动小齿圈转动,小齿圈在大齿圈外运动,进而带动旋转轴旋转,旋转轴的旋转带动多级液压缸可360
°
旋转,进而达到扶正构件可360
°
旋转,在此基础上,结合转动液压和开合液压,找准位置,对箭体进行扶正封固。
57.装置平台设置有集中控制模块和电力驱动模块,全回转车轮带有车轮驱动模块、可伸缩机械臂带有机械臂驱动模块。集成控制模块对机械臂驱动模块、车轮驱动模块、电力驱动模块进行控制。装置平台上固定有两个摄像头,两个摄像头位于装置平台的同一边的两端,对拍摄到的影响实时传送至集中控制模块。摄像头对封固装置在工作过程中的影像进行拍摄,传送到集中控制模块后,集中控制模块利用无线中继系统,通过海事卫星和vsat 卫星与服务船控制站建立通讯,将各信号传送至封固装置操作系统中,以方便工作人员在岸边远处的控制船内看见,并结合摄像头拍摄的影响对箭体扶正工作进行操作。工作人员也通过对封固装置操作系统的操作,对装置平台的移动、可伸缩机械臂的旋转和伸缩、扶正构件的转动进行操控,保证对箭体有效封固。
58.全回转车轮由各自独立的车轮驱动模块分别驱动,并能够绕垂向轴360
°
旋转;通过车轮的之间的配合,可以使得本封固装置在水平面内沿任意方向自由移动或转动。可伸缩机械臂带有的机械臂驱动模块,可完成旋转、升降及伸缩操作。进而可以全方位转动,找准角度,对箭体进行封固,帮助箭体进行后续回收工作。
59.电力驱动模块带有大容量蓄电池、配电板、变流器,可满足封固操作所需的电力供应,并且还设有外部充电接口,可以通过火箭回收平台的电力系统为蓄电池充电。
60.工作人员在服务船控制站通过封固装置操作系统发送遥控指令,经由海上火箭回收平台的无线中继系统传递至集中控制模块,从而实现对火箭封固装置上所有设备的集中控制。
61.如图6所示,本发明的火箭封固装置在使用时,需两个以上数量的火箭封固装置同时使用,具体操作步骤如下:
62.1)火箭可回收段降落到火箭回收平台之前,操作员从平台电力系统取电,完成对所有封固装置的蓄电池充电,并降下部分磁性固定桩将所有封固装置停驻在回收甲板边缘,等待火箭降落时所有操作员撤离。
63.2)火箭可回收段降落到火箭回收平台之后,通过平台的无线中继系统,向所有封固装置的控制模块发送远程指令,抬起磁性固定桩,并驱动全回转车轮按照指定路线分别移动至火箭周围。
64.3)切换至手动操作模式,在定位摄像头的辅助下,微调所有封固装置的位置和角度,使可伸缩机械臂对正火箭中部的可夹持部位。
65.4)伸出所有封固装置的可伸缩机械臂,操作扶正装置从不同方向夹持住火箭中部结构,并将机械臂锁定。
66.5)降下所有封固装置的磁性固定桩,使之与回收甲板紧密接触,完成回收火箭的封固操作。
67.完成封固操作后,利用残余燃料处理系统将火箭箭体内部残余的燃料排出,如图8-13所示,有火箭回收平台,火箭回收平台带有集中控制模块,集中控制模块利用交换机通过海事卫星和 vsat卫星与服务船控制站建立通讯。火箭回收平台的中心上方固定有六边形回收甲板,回收甲板周向等间距固定有三组卷筒组,每组卷筒组带有一个煤油软管卷筒和一个氮气软管卷筒,煤油软管卷筒上带有第一电机,氮气软管卷筒上带有第二电机,第一电机、第二电机通过集中控制模块控制。
68.沿回收甲板周向等间距设置三组卷筒组,将回收甲板等面积分成了三份,以至于无论火箭箭体降落在回收甲板上的任何位置,连接机器人都能以最快的速度抓取距离箭体最近的卷筒组的软管,与火箭箭体煤油贮箱上的软管进行对接。火箭箭体降落在回收甲板上,通过连接机器人将火箭箭体带有的煤油贮箱与回收甲板上的煤油软管连接,利用煤油输送泵将火箭箭体内的煤油进行泄放回收至煤油泄放柜,而此过程中的各动作均是通过远程遥控完成。通过火箭回收平台上设置的视频监控,对回收甲板上的情况进行监控,视频监控将回收甲板上的实时景象通过集中控制模块实时传送至远处的服务船,操作人员在远处的服务船上观察回收甲板上的各项动态。
69.煤油软管卷筒上缠绕有第一煤油软管,第一煤油软管的一端分别与第一煤油输送泵、第二煤油输送泵连接,第一煤油输送泵、第二煤油输送泵的输出管路汇总后依次与第一煤油泄放柜、第二煤油泄放柜连接,第一煤油软管另一端内部固定有快速接头。氮气软管卷筒上缠绕有第一氮气软管,第一氮气软管的一端依次与氮气减压阀组、氮气瓶组连接,另一端内部固定有快速接头。第一煤油输送泵、第二煤油输送泵、第一煤油泄放柜、第二煤油泄放柜、氮气减压阀组、氮气瓶组均固定在火箭回收平台上。
70.第一煤油软管上设置有第一遥控阀,第一氮气软管上设置有第二遥控阀,第一遥控阀、第二遥控阀通过集中控制模块控制。
71.回收甲板上设置有连接机器人,连接机器人可以在回收甲板上自由移动,连接机器人带有底板,底板上固定有滑轮,底板上固定有辅助臂,辅助臂有多段机械臂,多段机械臂之间铰接,辅助臂的自由端固定有抓手,抓手抓取第一煤油软管或第一氮气软管,将第一煤油软管与箭体煤油贮箱的煤油泄放口煤油泄放口连接、第一氮气软管与箭体煤油贮箱的氮气注入口连接,集中控制模块对连接机器人进行控制。辅助臂由多个机械臂铰接,可以进行上下升降、前后移动等动作,进而可以完成拾取回收甲板上的第一煤油软管或第一氮气软管,并利用抓手将第一煤油软管或第一氮气软管抓起,抓起后,连接机器人带着第一煤油软管或第一氮气软管向箭体方向移动,将煤油软管或氮气软管对接至火箭箭体煤油贮箱的相应位置。操作人员对此过程的实时景象均是通过视频监控来获悉,并通过传输到服务船的视频监控画面,对此过程进行监视及控制。
72.火箭箭体落在回收甲板上,通过封固装置对其封固后,通过视频监控判断出离火
箭箭体最近距离的卷筒组,控制连接机器人人前往离火箭箭体最近距离的卷筒组,连接机器人人带有的抓手先抓取第一氮气软管,抓取后,集成控制系统驱动第二电机工作,向外放第一氮气软管的长度,一边外放第一氮气软管的长度,一边抓手带着第一氮气软管前往火箭箭体,将第一氮气软管与火箭箭体煤油贮箱带有的氮气注入口快速对接。第一氮气软管与氮气注入口对接后返回至卷筒组,抓手抓取第一煤油软管前往火箭箭体,抓取后,集成控制系统驱动第一电机工作,向外放第一煤气软管的长度,一边外放第一煤气软管的长度,一边抓手带着第一煤气软管前往火箭箭体,将第一煤油软管与火箭箭体煤油贮箱带有的煤油泄放口煤油泄放口快速对接。
73.对接后,远程遥控打开第二遥控阀,对箭体煤油贮箱进行供气增压,增压后的氮气经由软管进入火箭箭体底部的煤油贮箱,将内部残余的煤油挤压出贮箱。当煤油贮箱内充满氮气后,远程遥控打开第一遥控阀门,并启动第一煤油输送泵,将箭体煤油贮箱内煤油驳运至第一煤油泄放柜和第二煤油泄放柜。第二煤油输送泵起到替换备用的作用。完成煤油泄放后,关闭相关的遥控阀和输送泵。
74.实施例2
75.根据实施例1所述的一种海上回收火箭封固装置,扶正构件还可以是机械爪,在装置平台上设置多个可伸缩机械臂,可伸缩机械臂带有的多级液压缸的自由端固定有机械爪。如图5所示,在装置平台上设置四个可伸缩机械臂,四个可伸缩机械臂分别位于装置平台四个边的中心,机械爪相对多级液压缸可360
°
旋转。
76.如图7所示,当使用带有机械爪的封固装置时,仅需一台封固装置即可,封固装置位于箭体下方,通过四个机械爪对箭体进行夹持封固。
77.本发明全程采用无线遥控方式,对降落到回收平台上并固定好的火箭箭体自动排除残余燃料、回收残余燃料,无需人工行驶船舶在回收平台附近进行作业。本发明在火箭降落至回收甲板后,可以迅速就位,完成火箭的封固作业;全程采用无线遥控方式,对降落到回收平台上的火箭箭体进行固定,固定好火箭箭体,以方便后续系列操作,无需人工行驶船舶在回收平台附近进行作业,大大提高回收火箭的安全性,采用磁性材料装置实现与回收甲板之间的稳定封固,大大降低回收平台返港图中发生火箭倾倒事故的风险。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。