1.本发明属于农、林业机械技术领域,特别是涉及一种可乘坐式榛子修枝疏叶机,应用于平原地区榛子园及丘陵地带榛树枝叶修剪作业。
背景技术:
2.目前,在榛树生长过程中,整形修剪是一项促进榛树结果、丰产的重要措施。随着榛子园区种植面积的不断开拓增大,剪枝作业量十分巨大,于此同时待修剪的榛子林枝繁叶茂,造成作业空间狭小、环境差,导致人工作业困难、劳动强度大、人工作业周期长等问题,普通远程遥控机具难以载人,遥控作业视线受限,作业质量难以保证。
技术实现要素:
3.针对上述存在的技术问题,提供一种可乘坐式榛子修枝疏叶机,采用圆盘式割台,能够通过液压控制调整切割锯作业姿态,实现切割台竖直升降、水平横向移动、俯仰角度的调节,采用遥控控制机具行走、转向、刀具转动等功能,根据园区榛子林的生长实际高度调节作业宽度和高度,达到修枝机最优的修剪效果。
4.本发明的目的是通过以下技术方案来实现的:
5.本发明一种可乘坐式榛子修枝疏叶机,包括圆盘式割台、u型臂、履带式行走底盘、竖直升降机构、割台横向伸缩机构、俯仰角度调节机构、左右倾斜调节机构及控制装置,在履带式行走底盘后部机架上设置驾驶员座椅,驾驶员座椅两侧设置支撑架,u型臂置于履带式行走底盘上方,开口端底部与支撑架顶部铰接,u型臂底部通过竖直升降机构连接在支撑架底部,u型臂封闭端通过俯仰角度调节机构连接割台横向伸缩机构,在割台横向伸缩机构的一侧通过左右倾斜调节机构连接圆盘式割台,控制装置设置在履带式行走底盘上,分别连接竖直升降机构、割台横向伸缩机构、俯仰角度调节机构、左右倾斜调节机构,调节割台位置及角度。
6.进一步地,所述竖直升降机构包括两u型臂升降液压杆,其一端连接在支撑架底部,另一端连接在u型臂的两臂底部,所述两u型臂升降液压杆分别连接液压油箱,通过控制两u型臂升降液压杆的伸缩,实现u型臂封闭端的升降。
7.进一步地,所述u型臂为伸缩臂,包括相互套置的两套筒和伸缩杆,在伸缩杆和套筒间连接u型臂伸缩液压杆,在两伸缩杆间连接连接杆,形成u型臂,其中,套筒连接支撑架和竖直升降机构的升降液压杆,通过u型臂伸缩液压杆的伸缩,推动u型臂内的伸缩杆伸缩,实现u型臂的水平纵向调节。
8.进一步地,所述割台横向伸缩机构包括横向伸缩臂和横向伸缩液压杆,横向伸缩液压杆两端分别连接横向伸缩臂的伸缩杆端和横向伸缩臂的套筒端;通过横向伸缩液压杆的伸缩,推动割台的横向位移。
9.进一步地,所述俯仰角度调节机构为俯仰角度调节液压杆,连接在u型臂连接杆和割台横向伸缩机构的横向伸缩臂套筒上,且横向伸缩臂的套筒与u型臂的两伸缩杆端铰接;
通过俯仰角度调节液压杆的伸缩,推动割台向前或向后侧倾斜。
10.进一步地,所述左右倾斜调节机构包括左右倾斜调节液压杆和连杆机构,所述圆盘式割台架和横向伸缩臂的伸缩杆上分别铰接有相互铰接的两组平行设置的连杆,两组连杆的中部通过铰接轴连接,形成四杆机构,在两组连杆的中部铰接轴和圆盘式割台架间就左右倾斜调节液压杆;通过左右倾斜调节液压杆的伸缩,推动割台的向左或向右侧倾斜。
11.进一步地,所述控制装置包括控制箱、液压油箱、各机构的液压阀,液压油箱设置在座椅下方,控制箱设置在履带式行走底盘中部,分别连接各伸缩液压杆的液压阀,控制其伸缩。
12.进一步地,所述控制箱由插入式钥匙控制启动和熄火;控制箱设有发动机一键启动按钮、电压表、电瓶充电插口及各个伸缩液压杆控制阀,通过控制箱控制各伸缩液压杆的伸缩。
13.进一步地,在所述履带式行走底盘上还设置有电启动汽油机,分别连接割台驱动电机、行走电机及车载蓄电池,通过启动电机发动汽油机,用汽油机发电的方式向履带式底盘电机及车载蓄电池供能。
14.进一步地,所述控制箱上还设置有遥控信号接收模块,控制箱分别连接履带式行走电机、割台驱动电机,通过接收遥控器的信号,开启或关闭履带式行走电机、割台驱动电机的运行。
15.本发明的有益效果为:
16.1.本发明车身上设计安装u型结构式升降臂。u型臂一端通过u型臂升降液压杆在下侧的托举连接机体,另一端通过与机架铰接连接。u型臂是通过u型臂升降液压杆的伸缩,发生绕定轴转动运动,实现将割台举起或降下动作。在u型臂上侧,装有u型臂伸缩液压杆,u型臂通过u型臂伸缩液压杆伸缩,推动u型臂内的伸缩臂的伸缩,实现将割台向前送或向后收的动作。
17.2.本发明的圆盘式割台通过割台横向伸缩液压杆、割台左右倾斜调节液压杆、割台俯仰角调节液压杆对圆盘式割台进行姿态调节控制。满足灵活修剪的目的。
18.3.本发明采用履带式行走方式适用于平原及丘陵地貌榛子园区作业,在系统中使用国家专利技术油电混动驱动技术,减少能源消耗,系统可按照整车实际运行工况要求而进行灵活调控,使得发动机始终保持在综合性能最佳的工作区域,可有效降低其油耗与排放。代替常规机械式或者液压驱动方式,增强工作续航能力。整机设计短小,转弯半径小,且设有遥控装置和信号接收装置,能够进行一定距离操作,避免人在空间狭小或有坡度地段的操作不便,提高了操作人员安全性,提高作业效率和作业质量,同时也降低了人的劳动强度。
19.4.本发明采用了电力切割装置,减轻了整机重量的同时增加了整体结构的稳定性。摆脱了采用人工作业的劳顿,大大减轻了劳动力用量,而且提高作业效率;增强设备的稳定性可控性,减轻了劳动强度。
附图说明
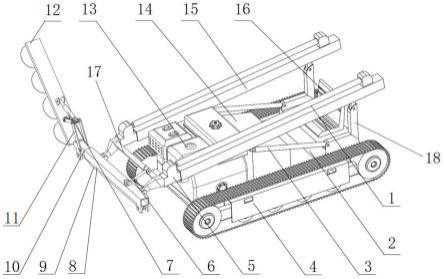
20.图1为本发明的结构示意图;
21.图2为图1中割台连接部分放大示意图。
22.图中:1.u型臂伸缩液压杆,2.液压油箱,3.u型臂升降液压杆,4.履带式行走底盘,5.伸缩杆,6.俯仰角调节液压杆,7.左右倾斜调节液压杆,8.横向伸缩臂,9.横向伸缩液压杆,10.横向伸缩杆,11.连杆,12.割台,13.汽油机,14.控制箱,15.u型臂,16.座椅,17.连接杆,18.支撑架。
具体实施方式
23.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。下面结合附图和实施例对本技术进行详细描述。
24.实施例:如图1、图2所示,一种可乘坐式榛子修枝疏叶机,包括圆盘式割台12、u型臂15、履带式行走底盘4、竖直升降机构、割台横向伸缩机构、俯仰角度调节机构、左右倾斜调节机构及控制装置,在履带式行走底盘4后部机架上设置驾驶员座椅16,驾驶员座椅16两侧设置支撑架18,u型臂15置于履带式行走底盘4上方,开口端底部与支撑架18顶部铰接,u型臂15底部通过竖直升降机构连接在支撑架18底部,u型臂15封闭端通过俯仰角度调节机构连接割台横向伸缩机构,在割台横向伸缩机构的一侧通过左右倾斜调节机构连接圆盘式割台12,控制装置设置在履带式行走底盘4上,分别连接竖直升降机构、割台横向伸缩机构、俯仰角度调节机构、左右倾斜调节机构,调节割台位置及角度。
25.进一步地,如图1所示,本例所述支撑架为直角形支架,一直角边水平设置在底盘4上,另一竖直直角边铰接u型臂15靠近座椅端底部。
26.所述竖直升降机构包括两u型臂升降液压杆3,其一端连接在支撑架18底部直角边端,另一端连接在u型臂15的底部,所述两u型臂升降液压杆3分别连接液压油箱2,由于u型臂15与支撑架18的竖直直角边顶部铰接,通过控制两u型臂升降液压杆3的伸缩,实现u型臂15的u口两端绕其连接轴升降的转动,进而实现u型臂15封闭端的升降。
27.进一步地,为了调节u型臂15的长度,以调节割台12相对驾驶员座椅16的长度,适应不同大小的榛子树,本例所述u型臂15为伸缩臂,包括相互套置的两套筒和伸缩杆5,在伸缩杆5和套筒间连接u型臂伸缩液压杆9,在两伸缩杆5间连接连接杆17,形成u型臂15,其中,套筒连接支撑架18和竖直升降机构的升降液压杆3,通过u型臂伸缩液压杆1的伸缩,推动u型臂15内的伸缩杆5伸缩,实现u型臂15的水平纵向调节。
28.进一步地,所述割台横向伸缩机构包括横向伸缩臂8和横向伸缩液压杆9,横向伸缩液压杆9两端分别连接横向伸缩臂8的横向伸缩杆10端和套筒端,通过横向伸缩液压杆9的伸缩,推动割台12的横向位移。
29.进一步地,本例所述俯仰角度调节机构为俯仰角度调节液压杆6,连接在u型臂连接杆17和割台横向伸缩机构的横向伸缩臂8的套筒上,且横向伸缩臂8的套筒与u型臂15的两伸缩杆5端铰接,通过俯仰角度调节液压杆6的伸缩,推动割台12的向前或向后侧倾斜一定角度。
30.进一步地,本例所述左右倾斜调节机构包括左右倾斜调节液压杆7和连杆机构,所述圆盘式割台12和横向伸缩臂8的横向伸缩杆10上分别铰接有相互铰接的两组平行设置的
连杆11,两组连杆11的中部通过铰接轴连接,形成四杆机构,在两组连杆11的中部铰接轴和圆盘式割台12间连接有左右倾斜调节液压杆7。通过左右倾斜调节液压杆7的伸缩,调节割台12向左或向右侧倾斜一定角度,实现作业姿态调节。
31.进一步地,所述控制装置包括控制箱14、液压油箱2、各机构的液压阀,液压油箱2设置在座椅16下方,控制箱14设置在履带式行走底盘4中部,分别连接各伸缩液压杆的液压阀,控制其伸缩。本例控制箱14由插入式钥匙控制启动和熄火;控制箱14设有发动机一键启动按钮、电压表、电瓶充电插口及各个伸缩液压杆控制阀,通过控制箱控制各伸缩液压杆的伸缩。
32.进一步地,在本例所述履带式行走底盘4上还设置有电启动汽油机13,分别连接割台驱动电机、行走电机及车载蓄电池,用汽油机发电的方式向履带式底盘行走电机及车载蓄电池供电。
33.进一步地,所述控制箱10上还设置有遥控信号接收模块,控制箱分别连接履带式行走电机、割台驱动电机进行信号传递,通过接收遥控器的信号,开启或关闭履带式行走电机、割台驱动电机的运行。
34.本发明修剪高度可从1.2米到3.5米。机械修剪能够剪1.5-2厘米以内的粗度。实现修剪角度可调节,依据树体情况,水平修剪直至垂直修剪可变。
35.本发明采用油电混动驱动技术,代替常规机械式或者液压驱动方式,可按照整车实际运行工况要求而进行灵活调控,使得发动机始终保持在综合性能最佳的工作区域,可有效降低其油耗与排放。
36.本发明采用了履带式行走底盘4,提高作业安全性、稳定性。
37.由于本实施例的榛子梳叶修枝机应用于空间狭小环境或者榛子园作业,或者同样适合在丘陵地区进行梳叶修枝作业。适合修剪高度可从1.2米到3.5米。
38.可以理解的是,以上关于本发明的具体描述,仅用于说明本发明而并非受限于本发明实施例所描述的技术方案,本领域的普通技术人员应当理解,仍然可以对本发明进行修改或等同替换,以达到相同的技术效果;只要满足使用需要,都在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
