1.本实用新型涉及玩具机器人技术领域,具体为一种玩具机器人。
背景技术:
2.玩具,泛指可用来玩的物品,通常是专门设计用于把玩娱乐的工具,玩玩具在人类社会中常常被作为一种寓教于乐的方式,而机器人作为各种影视作品中的常客,深受儿童喜欢,是儿童玩具中最常见的玩具形象
3.如申请号200720122474.9;本实用新型公开了一种玩具机器人,包括头部、身躯、手臂和脚部,所述头部的头顶上设有ic信号接收装置,头部的脸面上设有发射装置,头部的眼部处设有发光装置;所述身躯的胸部外表壳设有透光板,透光板后面设有发光装置,身躯内设置有驱动机构,驱动机构上连接有ic板;所述脚部内设置有行走机构,脚底设置有行走轮;手臂的手指上设有发光装置。本实用新型具有智能型仿真机器人功能,外观仿人体结构设计又逼真,深受儿童喜欢。
4.类似于上述玩具机器人目前还存在以下几点不足:
5.如上的玩具机器人,联动机构复杂,同时往往需要多个电机驱动,才能带动机器人运转,随着电机数量增加,容易发生损坏的概率也随之增加,且对电池的消耗量也相应增加,进而减少玩具机器人充电后的单次的使用时长,且传统的机器人规整的四肢造型,外观上也略显乏味。
6.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提出玩具机器人,以期达到更具有实用价值性的目的。
技术实现要素:
7.本实用新型的目的在于提供一种玩具机器人,以解决上述背景技术中提出的问题。
8.为实现上述目的,本实用新型提供如下技术方案:一种玩具机器人,包括:
9.躯干,为机器人的主体部分,所述躯干的上端固定安装有机器头,所述躯干的下端固定安装有驱动底座,所述躯干的正面开设有透明装饰仓,所述驱动底座的外侧设有多组仿真机械腿,所述躯干的左右两侧转动设置有摇摆手臂,所述摇摆手臂延伸至所述躯干的内侧,所述驱动底座的内部还设置有驱动行走器,所述驱动行走器延伸至所述驱动底座的下端。
10.优选的,支撑滑轮,其转动安装在所述驱动底座的下端,所述支撑滑轮关于所述驱动底座的竖直中心线对称设置两组;
11.连接封盖,其固定安装在所述驱动底座的上端,所述连接封盖设置在所述躯干与所述驱动底座的连接处;
12.驱动电机,其固定安装于所述驱动底座的内侧,所述驱动电机的输出轴外侧设有啮齿
13.传动齿轮组,其设置在所述驱动底座内部,所述传动齿轮组啮合于所述驱动行走器的上端,所述传动齿轮组还啮合于所述啮齿的外侧;
14.开关,其固定设置在所述驱动底座的内部,所述开关延伸至所述驱动底座的后端,所述开关与所述驱动电机之间的连接方式为电性连接;
15.传动轴,其转动安装于所述驱动底座的内侧,所述传动轴延伸至所述躯干的内侧,所述传动轴的下端设有啮合齿轮,所述啮合齿轮啮合于所述传动齿轮组的外侧。
16.优选的,所述传动轴的外侧设置有机械腿驱动盘,所述传动轴的上端设有连接齿轮。
17.优选的,所述仿真机械腿上还设置有联动杆,所述联动杆延伸至所述驱动底座的上端,所述联动杆延伸至所述机械腿驱动盘的下端。
18.优选的,所述仿真机械腿上还设置有联动杆,所述联动杆延伸至所述驱动底座的上端,所述联动杆延伸至所述机械腿驱动盘的下端。
19.优选的,所述躯干还包括有:
20.固定板,其固定安装在所述躯干的内侧,所述固定板的下端转动设置有延伸驱动轴,所述延伸驱动轴的末端啮合于所述连接齿轮的上端,所述延伸驱动轴的首端延伸至所述透明装饰仓的内部;
21.升降板,其滑动设置在所述躯干的内侧,所述升降板的滑动方向为上下滑动,所述升降板设置在所述延伸驱动轴的内侧,所述摇摆手臂设置在所述升降板的左右两侧;
22.所述延伸驱动轴外侧设有偏心轮,所述偏心轮贴合于所述升降板的内侧
23.优选的,所述透明装饰仓的内侧设置有装饰齿轮组,所述装饰齿轮组啮合于所述延伸驱动轴的首端。
24.与现有技术相比,本实用新型的有益效果是:该玩具机器人能够还原更为科幻的多足机器人的移动姿态的同时,也能模拟人类的摆臂动作,且通过机械结构进行装饰,大幅提高玩具的观赏性,可玩性,该玩具机器人外形可爱,且仅采用一组电机进行驱动,成本低廉,更加受到儿童的青睐。
25.1.通过传动轴的机械腿驱动盘,仿真机械腿通过联动杆进行转动连接,而联动杆则起到杠杆作用,将仿真机械腿抬起,而机械腿驱动盘下方设有三组凸起,当其转动时,便能使其下端的联动杆19上下摆动,由于联动杆19作为仿真机械腿4的杠杆,此每个仿真机械腿4都会跟随传动轴10的转动而上下摆动,从而还原多组机器人的行走姿态。
26.2.通过延伸驱动轴的偏心轮,延伸驱动轴在将动力传输到装饰齿轮组中时,其搭载的偏心轮便会带动升降板上下升降,进而使得安装在升降板两侧的摇摆手臂上下升降,进而还原肢体的摇摆动作。
27.3,通过透明装饰仓,透明装饰仓位于玩具机器人的正面,而内部则设有装饰齿轮组,装饰齿轮组则在内部机械的传动下,进行多组啮合转动,同时因为透明装饰仓具有透明特点,因此可以直接观察其内部传动的流程,从而起良好的装饰效果。
附图说明
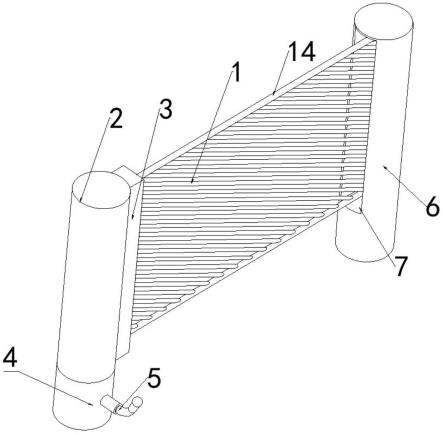
28.图1为本实用新型整体等轴侧结构示意图;
29.图2为本实用新型爆炸分解结构示意图;
30.图3为本实用新型拆除躯干后后方结构示意图;
31.图4为本实用新型拆除躯干后前方结构后结构示意图;
32.图5为本实用新型传动结构部分等轴侧后结构示意图。
33.图6为本实用新型延伸驱动轴部分立体结构示意图。
34.图中:1、躯干;2、驱动底座;3、机器头;4、仿真机械腿;5、透明装饰仓;6、摇摆手臂;7、支撑滑轮;8、驱动电机;9、传动齿;10、传动轴;11、啮合齿轮;12、机械腿驱动盘;13、驱动行走器;14、固定板;16、延伸驱动轴;15、啮齿;17、连接封盖;18、连接齿;19、联动杆;20、升降板;21、偏心轮;22、装饰齿轮组;23、开关。
具体实施方式
35.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
36.请参阅图1-6,一种玩具机器人,包括:躯干1,为机器人的主体部分,躯干1的上端固定安装有机器头3,躯干1的下端固定安装有驱动底座2,躯干1的正面开设有透明装饰仓5,驱动底座2的外侧设有多组仿真机械腿4,躯干1的左右两侧转动设置有摇摆手臂6,摇摆手臂6延伸至躯干1的内侧,驱动底座2的内部还设置有驱动行走器13,驱动行走器13延伸至驱动底座2的下端,通过驱动行走器13,能够使本机器人自由行走,同时驱动行走器13位于底部,且体积较小,能够使人误以为本机器人是有仿真机械腿4进行行走,支撑滑轮7,其转动安装在驱动底座2的下端,支撑滑轮7关于驱动底座2的竖直中心线对称设置两组;连接封盖17,其固定安装在驱动底座2的上端,连接封盖17设置在躯干1与驱动底座2的连接处;驱动电机8,其固定安装于驱动底座2的内侧,驱动电机8的输出轴外侧设有啮齿15,仅仅采用一个驱动电机8,即可带动整个机器人的机械结构运作,能够有效降低玩具功耗,节省电池需求。传动齿轮组9,其设置在驱动底座2内部,传动齿轮组9啮合于驱动行走器13的上端,传动齿轮组9还啮合于啮齿15的外侧;能够将动力输送给驱动行走器13的同时,也能带动传动轴10。开关23,其固定设置在驱动底座2的内部,开关23延伸至驱动底座2的后端,开关23与驱动电机8之间的连接方式为电性连接;传动轴10,其转动安装于驱动底座2的内侧,传动轴10延伸至躯干1的内侧,传动轴10的下端设有啮合齿轮11,啮合齿轮11啮合于传动齿轮组9的外侧,通过传动轴10,能够将动力输送到躯干1之中,带动躯干1内部的机构运作。
37.传动轴10的外侧设置有机械腿驱动盘12,传动轴10的上端设有连接齿轮18。仿真机械腿4上还设置有联动杆19,联动杆19延伸至驱动底座2的上端,联动杆19延伸至机械腿驱动盘12的下端。仿真机械腿4上还设置有联动杆19,联动杆19延伸至驱动底座2的上端,联动杆19延伸至机械腿驱动盘12的下端。通过传动轴10的机械腿驱动盘12,仿真机械腿4通过联动杆19进行转动连接,而联动杆19则起到杠杆作用,将仿真机械腿4抬起,当机械腿驱动盘12进行旋转时,便会使联动杆19上下升降,进而使仿真机械腿4能够上下活动,模拟行走姿态,而机械腿驱动盘12下方设有三组凸起,当其转动时,便能使其下端的联动杆19上下摆动,由于联动杆19作为仿真机械腿4的杠杆,因此每个仿真机械腿4都会跟随传动轴10的转动而上下摆动,从而还原多组机器人的行走姿态。躯干1还包括有:固定板14,其固定安装在
躯干1的内侧,固定板14的下端转动设置有延伸驱动轴16,延伸驱动轴16的末端啮合于连接齿轮18的上端,延伸驱动轴16的首端延伸至透明装饰仓5的内部;延伸驱动轴16外侧设有偏心轮21,偏心轮21贴合于升降板20的内侧,通过延伸驱动轴16的偏心轮21,延伸驱动轴16在将动力传输到装饰齿轮组22中时,其搭载的偏心轮21便会带动升降板20上下升降,进而使得安装在升降板20两侧的摇摆手臂6上下升降,进而还原肢体的摇摆动作,升降板20,其滑动设置在躯干1的内侧,升降板20的滑动方向为上下滑动,升降板20设置在延伸驱动轴16的内侧,摇摆手臂6设置在升降板20的左右两侧。透明装饰仓5的内侧设置有装饰齿轮组22,装饰齿轮组22啮合于延伸驱动轴16的首端,通过透明装饰仓5,透明装饰仓5位于玩具机器人的正面,而内部则设有装饰齿轮组22,装饰齿轮组22则在内部机械的传动下,进行多组啮合转动,同时因为透明装饰仓5具有透明特点,因此可以直接观察其内部传动的流程,从而起良好的装饰效果。
38.综上所述:该机器人分为躯干1以及驱动底座2两个部分,机器头3则仅起到装饰作用,玩具的行走实则是依靠驱动底座2的驱动行走器13,当按下开关23时,驱动电机8通电,驱动电机8通过啮齿15驱动传动齿轮组9,传动齿轮组9将动力输送到驱动行走器13上,在支撑滑轮7的支撑下,进而实现机器人的行走,同时传动齿轮组9也驱动着传动轴10的啮合齿轮11,带动传动轴10旋转,仿真机械腿4通过联动杆19转动连接在驱动底座2的外侧,联动杆19紧贴在机械腿驱动盘12的下端,机械腿驱动盘12的下表面有三组凸块,因此当机械腿驱动盘12进行旋转时,便会使联动杆19摆动,进而使仿真机械腿4能够上下活动,模拟行走姿态,驱动底座2通过连接封盖17固定,与躯干1相连,传动轴10利用连接齿18,将动力传输至延伸驱动轴16,延伸驱动轴16通过固定板14连接固定,延伸驱动轴16通过偏心轮21带动升降板20上下升降,进而使摇摆手臂6跟随动力上下升降,同时延伸驱动轴16也延伸到透明装饰仓5中,带动内部的装饰齿轮组22转动实现装饰目的,从而完成整个玩具机器人的结构工作流程。
39.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。