1.本发明属于空间在轨变构型机器人技术领域,特别是涉及一种空间多肢可变构机器人。
背景技术:
2.随着航天技术的发展,航天器平台的发展呈现大型化趋势,未来大型航天器将包括大型空间站、空间太阳能电站、大型空间望远镜、空间资源中转站等,其规模可达千米量级,整体体积和重量将远远超过现有运载火箭的运载能力,难以采取单次发射方式一次性入轨。
3.目前有效的解决方案是将大型航天器进行模块化分解,采用多次发射的方式分批入轨,在轨道上进行模块化组装和开展,同时要求组装方式灵活、效率高以及可靠性强。
4.目前大型航天器平台的主要采用空间机械臂进行辅助对接、组装、模块转移等(如国际空间站的),但传统的单个服务机械臂存在移动速度慢、工作范围受限、刚度低、组装效率低、功能单一且造价高等问题,无法满足未来大型航天器的在轨组装要求。因此针对未来大型航天器平台在轨组装、维修等日益复杂的空间任务需求,在满足低成本、易部署、易维修的同时,增加机器人的灵活性、可变构性、智能化、功能可拓展性是未来空间服务机器人的发展趋势。
技术实现要素:
5.有鉴于此,本发明旨在提出一种空间多肢可变构机器人,以解决上述背景技术中提到的问题。该空间多肢可变构机器人具有灵活变拓扑、灵巧移动、多功能操作、多臂协同操作、组网合作等能力,将用于未来的空间各类目标物的捕获、对接、组装、维修等复杂的任务中。
6.为实现上述目的,本发明采用以下技术方案:一种空间多肢可变构机器人,包括基体、若干机械臂、快装快换装置和末端工具,所述基体上连接有若干机械臂,每个机械臂上安装有末端工具,
7.机械臂和基体之间、机械臂和机械臂之间、机械臂和末端工具之间均设设置有快装快换装置,用于完成结构间的快速连接。
8.更进一步的,末端工具闲时储存于末端工具储存槽中,工作时由快装快换装置由槽中取出合适的工具,所述末端工具集包括一号夹爪、灵巧手、螺丝刀工具、剪钳工具、喷管工具、锤头工具和锯刀工具。
9.更进一步的,所述快装快换装置包括包括主动连接机构和被动连接机构,所述主动连接机构和被动连接机构连接或者主动连接机构和主动连接机构连接;
10.所述主动连接机构包括电机支撑套筒、上部连接盘、驱动电机、锁紧检测开关、锁紧检测开关支架、主动锁紧机构下盘、一号引导槽、多个快装快换夹爪、主动锁紧机构上盘、多个t型连接螺母、螺纹丝杠、多个夹爪驱动滑块、多个滑杆和上盘卡槽;
11.所述电机支撑套筒内置有驱动电机,用于驱动后端的螺纹丝杠转动,螺纹丝杠的转动带动与之相配合的t型连接螺母的上下平移运动,t型连接螺母与夹爪驱动滑块通过螺钉相固连,从而带动夹爪驱动滑块在滑杆上下平移运动,夹爪驱动滑块与快装快换夹爪铰接,进而带动快装快换夹爪收缩和打开,所述上部连接盘将电机支撑套筒与主动锁紧机构下盘相连接;所述快装快换夹爪用于与被动连接机构相互作用,实现夹持抓取对接功能。
12.更进一步的,所述锁紧检测开关用于检测螺纹丝杠的行程,当螺纹丝杠转动,快装快换夹爪闭合时,驱动夹爪驱动滑块下移当到达导轨滑杆底部时,夹爪驱动滑块上的金属触片与锁紧检测开关接触产生电信号传输给驱动电机,驱动电机停止转动并锁紧。
13.更进一步的,所述被动连接机构包括二号引导槽、被动连接机构电气接口、被动连接机构定位槽、被动连接机构定位销和被动连接机构法兰;主动锁紧机构上盘是对接时与被对接物体直接接触的部分,其上有主动连接机构定位销和主动连接机构定位槽,与被动连接机构定位槽和被动连接机构定位销相对应,主动连接机构电气接口和被动连接机构电气接口主要用于对接过程中电气通路的连接,通过串口的连接,使得电机和传感器的控制信号和数据能够在主动连接机构和被动连接机构之间传输,可以实现空间机械臂末端不同工具的更换和控制和机械臂构型的变换和控制。
14.更进一步的,主动连接机构搭载在空间机械臂末端,承担主动抓取和对接的功能;所述主动连接机构的通过主动连接机构底部法兰与空间机械臂末端固定连接。
15.更进一步的,三个快装快换夹爪采用并联的方式运动,快装快换夹爪在夹爪滑动槽中运动,夹爪滑动槽与夹爪支架为铰接,所以夹爪驱动滑块的平移运动被转化为快装快换夹爪的开合运动。
16.更进一步的,预紧弹簧位于夹爪驱动滑块后,用于提高夹持的应力,同时降低接触的刚度,使得机构免于直接接触而挤压变形损坏。
17.更进一步的,所述基体为正六边形几何体,内置铝合金框架结构。
18.更进一步的,所述基体内安装有控制系统、电路系统、通讯系统、热控系统、测量系统和工具储存槽,在选取工具时,由机械臂搭载快装快换装置从工具储存槽中夹持,选取合适的末端工具。
19.与现有技术相比,本发明所述的一种空间多肢可变构机器人的有益效果是:
20.1、本发明所述的空间多肢可变构机器人采用多条机械臂协同操作模式,相比传统的单机械臂,输出端口更多,对未来的各项复杂空间任务有良好的适应能力。
21.2、本发明所述的空间多肢可变构机器人具有可变拓扑的能力,利用快装快换模块可以实现构型的串/并联变化,极大拓展了工作空间,提升了系统驱动能力与刚度。
22.3、本发明所述的空间多肢可变构机器人是由自由漂浮基座基体、若干个可拆卸组装的机械臂和各类在轨末端操作工具构成,机械臂和基体之间、机械臂和机械臂之间、机械臂和末端操作工具之间等均通过快装快换装置连接,具备变拓扑、协同组网、空间灵巧移动和多功能组装等多种能力。
23.4、本发明所述的快装快换模块,具有机械、电源、通讯接口,使得空间多肢可变构机器人具有模块化、变拓扑、多功能等特点,适用于未来航天器各项在轨任务。
24.5、本发明的快装快换装置采用并联式的三爪锁紧机构设计,结构简单,可靠性高,适用于极端的空间工作环境。
25.6、本发明的快装快换装置采用v型引导槽设计,可以在对接过程中引导夹爪的运动,实现两个对接装置之间的姿态矫正,满足更精确的对接精度需求,适用于可视程度低、控制时延高的条件下的空间对接任务。
26.7、本发明的快装快换装置采用“异体同构”设计,不仅可以实现主动端和被动端的对接,还支持两个主动端相互对接,这样的设计可以让末端搭载快装快换装置的空间机械臂实现“多臂协同”、“灵活变构”等功能。
27.8、本发明的快装快换装置添加了预紧机构,即预紧弹簧机构,该机构可以实现对接碰撞过程中的“软接触”,既增加了缓冲避免刚性碰撞对机构的损坏,又可以利用弹簧施加更大的预紧力,使得对接更加牢固稳定。
28.9、本发明的快装快换装置具有机械连接可靠性高、支持快拔插的电气接口、大干扰条件下的自矫正能力强、模块化设计可拓展性高、异体同构的结构设计等特点,适用于未来航天器无人化在轨操作的任务要求。
29.10、本发明的快装快换装置作为一种在轨连接装置,具有独特的机械接口和电气接口,可以将各类在轨空间模块稳定、快速地连接在一起,形成具有机电一体化的整体,如在轨机械臂末端与另一机械臂末端之间、机械臂末端与各类在轨工具之间、机械臂末端与目标星体之间、两个对接的小型航天器之间等等。
附图说明
30.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
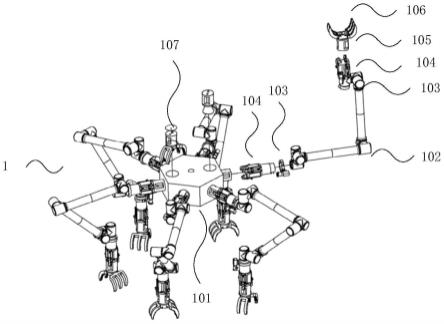
31.图1为空间多肢可变构机器人整体装置结构示意图;
32.图2为空间多肢可变构机器人末端工具集;
33.图3为空间多肢可变构机器人快装快换装置工作原理示意图;
34.图4为面向空间在轨服务的快装快换装置的爆炸结构示意图一;
35.图5为面向空间在轨服务的快装快换装置的爆炸结构示意图二;
36.图6为快装快换装置打开和闭合状态下的主剖视图和俯视图,其中(a)表示的是打开状态下的主剖视图,(b)表示的是打开状态下的俯视图,(c)表示的是闭合状态下的主剖视图,(d)表示的是闭合状态下的俯视图;
37.图7为两个快装快换装置主动端相互对接完成状态示意图;
38.图8为快装快换装置主动端与被动端(工具端)相互对接完成状态示意图;
39.图9为卫星利用快装快换装置连接末端工具进行在轨操作;
40.图10为两个卫星利用快装快换装置进行在轨对接;
41.图11为空间多肢可变构机器人搭载卫星平台示意图;
42.图12为空间多肢可变构机器人基于多相机的目标三维测量和重建示意图;
43.图13为空间多肢可变构机器人搂抱转移目标卫星示意图;
44.图14为空间多肢可变构机器人变拓扑抓取示意图一;
45.图15为空间多肢可变构机器人变拓扑抓取示意图二;
46.图16为空间多肢可变构机器人协同操作示意图;
47.图17为空间多肢可变构机器人爬行移动示意图;
48.图18为空间多肢可变构机器人组装操作示意图;
49.图19为多空间多肢可变构机器人协同组网工作示意图
50.附图标记:1-空间多肢可变构机器人,101-基体,102-机械臂,103-视觉测量系统,104-快装快换夹爪,105-快装快换接口,106-末端工具,107-末端工具储存槽;2-末端工具集,201-一号夹爪,202-灵巧手,203-螺丝刀工具,204-剪钳工具,205-喷管工具,206-锤头工具,207-锯刀工具;3-快装快换装置,1-1-主动连接机构底部法兰;1-2-电机支撑套筒;1-3-上部连接盘;1-4-驱动电机;1-5-锁紧检测开关;1-6-锁紧检测开关支架;1-7-主动锁紧机构下盘;1-8-一号引导槽;1-10-夹爪滑动槽;1-11-夹爪支架;1-12-主动锁紧机构上盘;1-13-螺纹丝杠轴承;1-14-t型连接螺母;1-15-螺纹丝杠;1-16-夹爪驱动滑块;1-17-滑杆;1-18-预紧弹簧;1-19-上盘卡槽;1-20-主动连接机构电气接口;1-21-主动连接机构定位销;1-22-主动连接机构定位槽;2-1-二号引导槽;2-2-被动连接机构电气接口;2-3-被动连接机构定位槽;2-4-被动连接机构定位销;2-5-被动连接机构法兰;4-相机。
具体实施方式
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地阐述。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
52.一、具体实施方式一,参见图1-19说明本实施方式,一种空间多肢可变构机器人,包括基体101、若干机械臂102、快装快换装置和末端工具106,所述基体101上连接有若干机械臂102,每个机械臂102上安装有末端工具106,
53.机械臂102和基体101之间、机械臂102和机械臂102之间、机械臂102和末端工具106之间均设设置有快装快换装置3,用于完成结构间的快速连接。
54.末端工具106闲时储存于末端工具储存槽107中,工作时由快装快换装置104由槽中取出合适的工具。
55.所述末端工具集2包括一号夹爪201、灵巧手202、螺丝刀工具203、剪钳工具204、喷管工具205、锤头工具206和锯刀工具207。。
56.所述基体101为正六边形几何体,内置铝合金框架结构。
57.末端工具集包括:1)夹爪装置:通过交错的夹齿设计,可以对不同直径圆柱型桁架的适应性抓取,以实现在桁架上的爬行,以及对各类物体的抓取、转移;2)灵巧手装置:通过仿生人手构造设计,具有15个自由度,可以灵巧精细地操作各类工具;3)螺丝刀工具装置:通过搭载各类型号的刀具,可以对空间目标上的螺丝进行拧紧、释放等操作,方便维修和拆解;4)喷管工具装置:通过连接基体上的压力容器罐,可以喷出气体,通过反作用力驱动机器人漂浮移动;5)剪钳工具、锤头工具、锯刀工具装置:对目标进行各种相应操作。
58.本发明所述的空间多肢可变构机器人的基体101为边长为0.3m,高度为0.2m的正六边形几何体,内置铝合金框架结构,具有良好的结构强度和较轻的质量。作为空间多肢可变构机器人的“躯干”,基体101的每个面上都装有快装快换模块接口,共分布了6个接口,最多可以连接6个机械臂分支,丰富的接口设置使得空间多肢可变构机器人具备运动灵巧性和功能拓展性。
59.同时基体101也作为空间多肢可变构机器人的“大脑”,是为空间多肢可变构机器
人的运行核心,搭载了控制系统、电路系统、通讯系统、热控系统、测量系统和工具储存库107等,在选取工具时,由机械臂搭载104快装快换装置从工具储存槽107中夹持,选取合适的末端工具。
60.控制系统主要负责依据上级控制指令,基于所设计的控制算法,生成决策和控制信号,向其搭载的多个空间机械臂系统下达控制指令,以执行各种空间任务。电路系统负责提供空间多肢可变构机器人运行时的电力配送和供给,由于太阳翼会对机械臂的工作空间造成极大的压缩,空间多肢可变构机器人采用可充电式电源,在电力耗尽前,可通过移动到基地空间站上的电站进行电能补充以实现长时间在轨工作。热控系统负责调节机器人运行时的工作温度,在空间极端环境中保证空间多肢可变构机器人单元正常工作。通讯系统负责机器人运行过程中各种信号的接受和发射,包括空间多肢可变构机器人单元内部数据传输、空间多肢可变构机器人单元与上级系统(地基控制平台、天基控制平台等)通讯、空间多肢可变构机器人单元相互间的通讯。测量系统是指在空间多肢可变构机器人上配备的数据传感器与采集器等机构进行数据的收集,并通过通讯系统传输给控制系统进行计算和分析。
61.移动工具储存库107是指空间多肢可变构机器人单元上搭载的用于存储各种在轨操作模块的工具库,如手爪、螺丝、剪钳等工具,方便执行各类空间操作任务。
62.可拆装机械臂102是由若干个具有七个自由度的冗余机械臂组成。首段和尾端通过快装快换装置与机器人基体101或者末端工具106相连,同时具有首尾同构的特点,保证了具有良好的构型拓展性。单个的可拆装机械臂102伸展长度为2m,具有七个旋转关节,每个关节由伺服电机驱动,具有良好的精度和动态性能,保证了空间操控的灵活性与精确性。
63.单目相机4分别安装于空间多肢可变构机器人机械臂系统的首末两端,采用eye-in0hand模式,利用多组单目相机实现对各类空间目标(如空间待组装桁架、待捕获星体、待维修目标等)的三维形貌特征重建、位姿估计等功能。
64.所述快装快换装置3包括包括主动连接机构和被动连接机构,所述主动连接机构和被动连接机构连接或者主动连接机构和主动连接机构连接;
65.所述主动连接机构包括电机支撑套筒1-2、上部连接盘1-3、驱动电机1-4、锁紧检测开关1-5、锁紧检测开关支架1-6、主动锁紧机构下盘1-7、一号引导槽1-8、多个夹爪104、主动锁紧机构上盘1-12、多个t型连接螺母1-14、螺纹丝杠1-15、多个夹爪驱动滑块1-16、多个滑杆1-17和上盘卡槽1-19;
66.所述电机支撑套筒1-2内置有驱动电机1-4,用于驱动后端的螺纹丝杠1-15转动,螺纹丝杠1-15的转动带动与之相配合的t型连接螺母1-14的上下平移运动,t型连接螺母1-14与夹爪驱动滑块1-16通过螺钉相固连,从而带动夹爪驱动滑块1-16在滑杆1-17上下平移运动,夹爪驱动滑块1-16与夹爪104铰接,进而带动夹爪104收缩和打开,所述上部连接盘1-3将电机支撑套筒1-2与主动锁紧机构下盘1-7相连接;所述夹爪104用于与被动连接机构相互作用,实现夹持抓取对接功能。
67.所述锁紧检测开关1-5用于检测螺纹丝杠1-15的行程,当螺纹丝杠1-15转动,夹爪104闭合时,驱动夹爪驱动滑块1-16下移当到达导轨滑杆1-17底部时,夹爪驱动滑块1-16上的金属触片与锁紧检测开关1-5接触产生电信号传输给驱动电机1-4,驱动电机1-4停止转动并锁紧。
68.所述被动连接机构包括二号引导槽2-1、被动连接机构电气接口2-2、被动连接机构定位槽2-3、被动连接机构定位销2-4和被动连接机构法兰2-5;主动锁紧机构上盘1-12是对接时与被对接物体直接接触的部分,其上有主动连接机构定位销1-21和主动连接机构定位槽1-22,与被动连接机构定位槽2-3和被动连接机构定位销2-4相对应,主动连接机构电气接口1-20和被动连接机构电气接口2-2主要用于对接过程中电气通路的连接,通过串口的连接,使得电机和传感器的控制信号和数据能够在主动连接机构和被动连接机构之间传输,可以实现空间机械臂末端不同工具的更换和控制和机械臂构型的变换和控制。
69.主动连接机构搭载在空间机械臂末端,承担主动抓取和对接的功能;所述主动连接机构的通过主动连接机构底部法兰1-1与空间机械臂末端固定连接。
70.三个夹爪104采用并联的方式运动,夹爪104在夹爪滑动槽1-10中运动,夹爪滑动槽1-10与夹爪支架1-11为铰接,所以夹爪驱动滑块1-16的平移运动被转化为夹爪104的开合运动。
71.预紧弹簧1-18位于夹爪驱动滑块1-16后,用于提高夹持的应力,同时降低接触的刚度,使得机构免于直接接触而挤压变形损坏。
72.所述驱动电机1-4为步进电机或者伺服电机。
73.主动锁紧机构下盘1-7与夹爪支架1-11、滑杆1-17和上部连接盘1-3相互连接。
74.主动锁紧机构上盘1-12与夹爪支架1-11、滑杆1-17以及螺纹丝杠轴承1-13相连接。
75.所述上盘凹卡槽1-19位于主动锁紧机构上盘1-12背部,用于对接时,夹爪1-9可以扣紧凹槽,增加对接的稳定性和可靠性。
76.本发明所述的一种面向空间在轨服务的快装快换装置的主动连接机构为异体同构设计,即没有“公母”之分,意味着不仅主动连接机构和被动连接机构可以对接,两个主动连接机构之间也可以相互对接(如图7所示),便于空间机械臂的变构型和任务拓展。
77.所述被动连接机构包括二号引导槽2-1、被动连接机构电气接口2-2、被动连接机构定位槽2-3、被动连接机构定位销2-4和被动连接机构法兰2-5。一号引导槽1-8为一v型铝合金板件,位于主动锁紧机构下盘1-7和主动锁紧机构上盘1-12之间,同时与夹爪支架1-11相固定,二号引导槽2-1与一号引导槽1-8作用相同,都是用于在对接夹持过程中帮助夹爪1-9更精确地定位,“v”型的设计可以在夹爪1-9接触时,便于将夹爪1-9引导到更狭窄的底部凹槽,通过姿态矫正从而实现精确的定位对接,这种设计适用于视觉条件差、控制时延大的复杂宇宙空间工作条件中,提高了对接的可靠性和精确性。
78.所述主动锁紧机构上盘1-12是对接时与被对接物体直接接触的部分,其上有主动连接机构定位销1-21和主动连接机构定位槽1-22,与被动连接机构定位槽2-3和被动连接机构定位销2-4相对应,对接时相互装配,起到限位作用。同时,定位槽和定位销的锥型设计也可以引导对接过程,使得对接更加可靠精准。
79.主动连接机构电气接口1-20和被动连接机构电气接口2-2主要用于对接过程中电气通路的连接,通过串口的连接,使得电机和传感器的控制信号和数据能够在主动端和被动端之间传输,可以实现空间机械臂末端不同工具的更换和控制和机械臂构型的变换和控制。
80.如此,通过快装快换装置的电气接口和快装快换夹爪104的锁紧和释放,可以实现
可拆卸组装的机械臂和基体101之间、机械臂102和机械臂102之间、机械臂102和末端工具106等之间的快装快换功能。
81.该快装快换装置同时具有电路和通讯接口,以实现两个装置之间电源和通讯的连接。快装快换模块使得空间多肢机器人拥有了任意变构、拓展组网、多功能操作的能力,是空间多肢可变构机器人的独特核心部分。
82.所述的空间多肢可变构机器人,可以实现多智能体之间的群体智能,具有多个空间多肢可变构机器人协同组网进行空间任务工作的特点。
83.所述空间多肢可变构机器人主要应用于空间环境中的各类任务中,如组装、捕获、对接、维修、攻击、转移等,也可应用在类似在有重力环境中(地球及其他行星等)的同种相似任务中。
84.本发明所述的空间多肢可变构机器人是依照仿生学原理,参考自然界中的蚂蚁、蜘蛛等多肢节动物的结构特点、运动方式、行为组织模式等的设计而出的一种空间机器人。该空间多肢可变构机器人包括机器人基体、若干个可拆装机械臂、快装快换模块、多功能空间操作工具集等部分。
85.本实施例公开了一种空间多肢可变构机器人,如图所示。
86.图1为空间多肢可变构机器人的系统示意图,包括了机器人基体,六组七自由度机械臂、快装快换装置和末端空间操作工具集。
87.图2为空间操作工具集合示意图,主要包括螺丝刀、剪钳、喷气喷管、锤头、锯刀、夹爪、灵巧手等,用于各类空间任务中如维修、捕获、拆解、组装和转运等。
88.图3为空间多肢可变构机器人快装快换装置工作原理示意图,快装快换装置由一个末端电机驱动丝杆,带动三个夹爪实现打开和收拢的功能。接口模块是由三个滑槽和位于底部的凹槽组成,夹爪通过滑槽滑到底部凹槽中,实现夹爪和接口之间牢固的锁定。更进一步地,滑槽设计成v型,可以引导夹爪滑到凹槽中,即使夹爪和接口的姿态存在一定偏差依然可以实现锁紧,具有一定的自校准能力。
89.图11为空间多肢可变构机器人搭载卫星平台示意图,该机器人可以“寄生”在传统的卫星平台上,利用卫星平台的电源和充气罐等,充当卫星的执行机构,配合卫星完成转移、组装等多种任务。
90.图12为空间多肢可变构机器人基于多相机的目标三维测量和重建示意图,在抵近目标后,安装于机械臂末端的多个视觉相机对目标进行全方位扫描,实现对各类空间目标的三维形貌特征重建、位姿估计等功能。
91.图14为空间多肢可变构机器人搂抱转移目标卫星示意图,利用其中三条机械臂搂抱目标星体,再利用末端搭载喷气喷管模块的机械臂进行姿态调整和轨道转移。将喷气执行器模块搭载在机械臂末端,相较置于星体上,优势在于相同条件下可以产生更大的姿态调整力矩,更加灵活调整方位和角度。
92.图15为空间多肢可变构机器人变拓扑抓取示意图,由于传统机械臂工作空间受限较大,在一些复杂的空间操作任务中无法胜任,如目标无法抵近、障碍物过多等特殊情况,而空间多肢可变构机器人可以通过快装快换模块,采用变拓扑方式,将机械臂工作空间进行极大地拓展,更加灵活地执行各类任务。
93.图16为空间多肢可变构机器人协同操作示意图,利用快装快换装置,该机器人可
以任意地组成串/并联拓扑结构,结合设计的控制策略和算法,能够实现多臂之间的协同操控,提升系统驱动能力与刚度。
94.图17为空间多肢可变构机器人爬行移动示意图,利用末端夹爪夹取桁架,同时几组机械臂配合交替运动,实现在空间桁架上的灵活移动。
95.图18为空间多肢可变构机器人组装操作示意图,利用末端空间操作工具,可以实现对大型航天器结构的在轨拼接和组装。
96.图19为多个空间多肢可变构机器人协同组网工作示意图。大型结构在组装过程中,由于尺寸较大,通常具有较大的柔性,容易在操作过程中发生振动甚至发生损坏,利用多个空间多肢可变构机器人协同对目标进行操作,可以极大地提升工作效率、操作安全性和精度。
97.以上公开的本发明实施例只是用于帮助阐述本发明。实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。