技术特征:
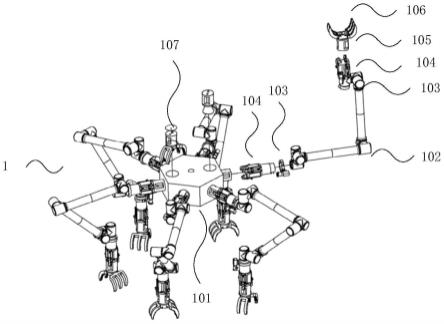
1.一种空间多肢可变构机器人,其特征在于:包括基体(101)、若干机械臂(102)、快装快换装置和末端工具(106),所述基体(101)上连接有若干机械臂(102),每个机械臂(102)上安装有末端工具(106),机械臂(102)和基体(101)之间、机械臂(102)和机械臂(102)之间、机械臂(102)和末端工具(106)之间均设设置有快装快换装置(3),用于完成结构间的快速连接。2.根据权利要求1所述的空间多肢可变构机器人,其特征在于:末端工具(106)储存于末端工具储存槽(107)中,工作时由快装快换装置(3)从槽中取出合适的工具。3.根据权利要求1所述的空间多肢可变构机器人,其特征在于:所述末端工具集(2)包括一号夹爪(201)、灵巧手(202)、螺丝刀工具(203)、剪钳工具(204)、喷管工具(205)、锤头工具(206)和锯刀工具(207)。4.根据权利要求1所述的空间多肢可变构机器人,其特征在于:所述快装快换装置(3)包括包括主动连接机构和被动连接机构,所述主动连接机构和被动连接机构连接或者主动连接机构和主动连接机构连接;所述主动连接机构包括电机支撑套筒(1-2)、上部连接盘(1-3)、驱动电机(1-4)、锁紧检测开关(1-5)、主动锁紧机构下盘(1-7)、一号引导槽(1-8)、多个快装快换夹爪(104)、主动锁紧机构上盘(1-12)、多个t型连接螺母(1-14)、螺纹丝杠(1-15)、多个夹爪驱动滑块(1-16)、多个滑杆(1-17)和上盘卡槽(1-19);所述电机支撑套筒(1-2)内置有驱动电机(1-4),用于驱动后端的螺纹丝杠(1-15)转动,螺纹丝杠(1-15)的转动带动与之相配合的t型连接螺母(1-14)的上下平移运动,t型连接螺母(1-14)与夹爪驱动滑块(1-16)通过螺钉相固连,从而带动夹爪驱动滑块(1-16)在滑杆(1-17)上下平移运动,夹爪驱动滑块(1-16)与快装快换夹爪(104)铰接,进而带动快装快换夹爪(104)收缩和打开,所述上部连接盘(1-3)将电机支撑套筒(1-2)与主动锁紧机构下盘(1-7)相连接;所述快装快换夹爪(104)用于与被动连接机构相互作用,实现夹持抓取对接功能。5.根据权利要求4所述的空间多肢可变构机器人,其特征在于:所述锁紧检测开关(1-5)用于检测螺纹丝杠(1-15)的行程,当螺纹丝杠(1-15)转动,快装快换夹爪(104)闭合时,驱动夹爪驱动滑块(1-16)下移当到达导轨滑杆(1-17)底部时,夹爪驱动滑块(1-16)上的金属触片与锁紧检测开关(1-5)接触产生电信号传输给驱动电机(1-4),驱动电机(1-4)停止转动并锁紧。6.根据权利要求4所述的空间多肢可变构机器人,其特征在于:所述被动连接机构包括二号引导槽(2-1)、被动连接机构电气接口(2-2)、被动连接机构定位槽(2-3)、被动连接机构定位销(2-4)和被动连接机构法兰(2-5);主动锁紧机构上盘(1-12)是对接时与被对接物体直接接触的部分,其上设置有主动连接机构定位销(1-21)和主动连接机构定位槽(1-22),与被动连接机构定位槽(2-3)和被动连接机构定位销(2-4)相对应,主动连接机构电气接口(1-20)和被动连接机构电气接口(2-2)用于对接过程中电气通路的连接,通过串口的连接,使得电机和传感器的控制信号和数据能够在主动连接机构和被动连接机构之间传输,可以实现空间机械臂末端不同工具的更换和控制和机械臂构型的变换和控制。7.根据权利要求4所述的空间多肢可变构机器人,其特征在于:主动连接机构搭载在空间机械臂末端,承担主动抓取和对接的功能;所述主动连接机构的通过主动连接机构底部
法兰(1-1)与空间机械臂末端固定连接。8.根据权利要求4所述的空间多肢可变构机器人,其特征在于:三个快装快换夹爪(104)采用并联的方式运动,快装快换夹爪(104)在夹爪滑动槽(1-10)中运动,夹爪滑动槽(1-10)与夹爪支架(1-11)为铰接,所以夹爪驱动滑块(1-16)的平移运动被转化为快装快换夹爪(104)的开合运动。9.根据权利要求4所述的空间多肢可变构机器人,其特征在于:预紧弹簧(1-18)位于夹爪驱动滑块(1-16)后,用于提高夹持的应力,同时降低接触的刚度,使得机构免于直接接触而挤压变形损坏。10.根据权利要求1所述的空间多肢可变构机器人,其特征在于:所述基体(101)为正六边形几何体,内置铝合金框架结构。
技术总结
本发明提出了一种空间多肢可变构机器人,属于空间在轨变构型机器人领域。解决了针对现有大型航天器平台在轨组装、维修等空间任务需求,如何满足低成本、易部署、易维修的同时,增加机器人的灵活性、可变构性、智能化、功能可拓展性的问题。该空间多肢可变构机器人包括基体、若干机械臂、快装快换装置和末端工具,所述基体上连接有若干机械臂,每个机械臂上安装有末端工具,机械臂和基体之间、机械臂和机械臂之间、机械臂和末端工具之间均设设置有快装快换装置,用于完成结构间的快速连接。本发明具有灵活变拓扑、灵巧移动、多功能操作、多臂协同操作、组网合作等能力,将用于未来的空间各类目标物的捕获、对接、组装、维修等复杂的任务中。中。中。
技术研发人员:魏承 魏庆生 岳程斐 曹喜滨
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.08.30
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。