技术特征:
1.一种具有输入死区约束的平面二连杆机械臂控制方法,其特征在于,包括以下步骤:s1:建立平面二连杆机械臂的动力学方程;s2:定义误差系统,设计第一虚拟控制律α
i,1
;s3:设计相对阈值事件触发机制;s4:设计第二虚拟律α
i,2
、自适应律和s5:基于matlab实验平台,进行仿真实验。2.根据权利要求1所述的具有输入死区约束的平面二连杆机械臂控制方法,其特征在于,所述步骤s1通过拉格朗日方法对平面二连杆机械臂建立动力学方程:其中,q=[q1,q2]
t
是关节角,是角速度,是角加速度,m(q)为惯性矩阵,为离心力和哥氏矢量,g(q)为重力矢量,d(u)=[d1(u1),d2(u2)]
t
为输入死区,u=[u1,u2]
t
是输入转矩;其中,是输入转矩;其中,是输入转矩;其中,是输入转矩;其中,θ2=m2l1l2,θ4=m2l2,θ5=(m1 m2)l1;m
i
和l
i
(i=1,2)分别代表连杆质量和连杆长度g为重力加速度;c
i
和s
i
(i=1,2)分别代表cos(q
i
)和sin(q
i
),c
12
代表cos(q1 q2)。3.根据权利要求2所述的具有输入死区约束的平面二连杆机械臂控制方法,其特征在于,所述步骤s1对所述动力学方程进行坐标变换得到:其中,x
i,1
=q
i
,则输入死区的数学表达式为:d
i
(u
i
)=h
i
u
i
g
ii
其中,h
i,1
>0是负半轴中直线的未知斜率,h
i,2
>0是正半轴中直线的未知斜率,g
i,1
<0和g
i,2
>0是未知转折点,u
i
是输入转矩,d
i
(u
i
)为输入死区的模型输
出。4.根据权利要求3所述的具有输入死区约束的平面二连杆机械臂控制方法,其特征在于,所述步骤s2中的误差系统用以下公式表示:其中,e
i,1
是跟踪误差,e
i,2
是虚拟误差,x
i,d
是系统的期望输出,α
i,1
是虚拟控制律,i=1,2;则第一虚拟控制律α
i,1
为:其中,a
i,1
和b
i,1
为正设计参数,5.根据权利要求4所述的具有输入死区约束的平面二连杆机械臂控制方法,其特征在于,所述步骤s3通过以下公式计算事件触发控制信号ω
i
(t):其中,控制律u
i
通过以下公式计算:其中,δ
i
>0、0<ρ
i
<1、o
i
>0、r为实数,inf{
·
}为下确界,k为整数,t
i,k
为第k个触发时刻,t
i,k 1
为第k 1个触发时刻,m(t)为测量误差,且m
i
(t)=ω
i
(t)-u
i
(t);其中,中间控制率通过以下公式计算:q
i
=[α
i,2
,1]
t
其中,其中,和分别为和的估计值,α
i,2
为第二虚拟控制律。6.根据权利要求5所述的具有输入死区约束的平面二连杆机械臂控制方法,其特征在于,所述步骤s4中的第二控制率α
i,2
通过以下公式计算:自适应率和通过以下公式计算:通过以下公式计算:其中,a
i,2
、b
i,2
、λ
i
、ν
i
、η
i
、κ
i
和ζ
i
为正设计参数,φ
i
(x
i
)=[φ
i,1
(x
i
),φ
i,2
(x
i
),...φ
i,n
(x
i
)]
t
是神经网络基函数向量,φ
i,j
(x
i
)是基函数,j=1,2,...,n,n是神经元的个数;)是基函数,j=1,2,...,n,n是神经元的个数;7.根据权利要求6所述的具有输入死区约束的平面二连杆机械臂控制方法,其特征在于,所述步骤s5在基于matlab实验平台的仿真实验中,选取机械臂参数:m1=4kg,m2=2kg,l1=l2=0.5m;系统的初始状态为状态1:x
11
(0)=0.2,x
12
(0)=0,x
21
(0)=0.2,x
22
(0)=0;
控制器参数为:a
11
=b
11
=9,a
12
=b
12
=10,a
21
=b
21
=6,a
22
=b
22
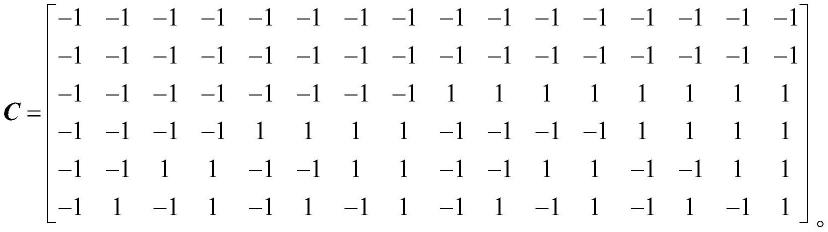
=10,κ1=κ2=0.5,μ1=μ2=1,λ1=λ2=ν1=ν2=1,ρ1=ρ2=0.1,o1=o2=0.1,η1=η2=ζ1=ζ2=0.1;采样周期为0.01s;神经网络高斯函数选取为:其中,j=1,2,...,16,由高斯函数的中心c
j
组成的矩阵c=[c1,c2,...,c
16
]如下:
技术总结
本发明公开了一种具有输入死区约束的平面二连杆机械臂控制方法,包括以下步骤:S1:建立平面二连杆机械臂的动力学方程;S2:定义误差系统,设计第一虚拟控制律α
技术研发人员:王建晖 王晨 张立 李咏华 吴宇深 张春良
受保护的技术使用者:广州大学
技术研发日:2022.08.31
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。