1.本技术涉及地质工程技术领域,特别涉及一种地质图的生成方法、装置、计算机设备和存储介质。
背景技术:
2.矿区所在地质区域的地质图,能够说明矿区所在地质区域的地质特征(如地层、构造、岩浆岩等)和成矿地质环境,反映该矿区的矿产远景,为进一步发现矿区的矿床提供指导。因此,地质区域的地质图对开采矿区十分重要。
3.相关技术中,在生成地质区域的地质图时,将该地质区域离散化,即将其分割为一个由多个矩形组成的正交网格,基于该地质区域的地质数据和该正交网格的每个节点,确定该地质区域的生成数据,基于该生成数据生成该地质区域的地质图。由于矩形组成的正交网格的形状规则,而地质区域的地质特征和成矿地质环境复杂多变,这样,基于该正交网格确定的生成数据不准确,进而使生成的地质图不符合地质区域的地质规律,从而导致地质图的准确度低。
技术实现要素:
4.本技术实施例提供了一种地质图的生成方法、装置、计算机设备和存储介质,能够提高地质图的准确度。所述技术方案如下:
5.一方面,提供了一种地质图的生成方法,所述方法包括:
6.获取待成图的目标地质区域的地质数据、边界数据和正交网格;
7.从所述边界数据中,确定所述目标地质区域的两组边界点,每组边界点包括间隔的多个第一节点;
8.对每组边界点进行组内节点插值;
9.基于组内节点插值之后的所述两组边界点,确定所述目标地质区域的多个条形网格,每个条形网格的上下边的两个端点为所述两组边界点中位置对应的两个第一节点;
10.对所述每个条形网格进行网格节点插值,得到多组插值点,每组插值点包括间隔的多个第一节点;
11.基于组内节点插值之后的所述两组边界点和所述多组插值点,生成所述目标地质区域的趋势网格;
12.基于所述地质数据,确定所述趋势网格的每个第一节点的种子点参数;
13.基于所述趋势网格的每个第一节点的种子点参数,确定所述正交网格的每个待插值点的插值参数,所述待插值点为所述正交网格的节点;
14.基于所述正交网格的每个待插值点的插值参数,生成所述目标地质区域的地质图。
15.在一种可能的实现方式中,所述基于组内节点插值之后的所述两组边界点和所述多组插值点,生成所述目标地质区域的趋势网格,包括:
16.将组内节点插值之后的每组边界点的相邻第一节点对应连接,以及将相邻的两组插值点中的每个插值点对应连接,生成所述目标地质区域的趋势网格。
17.在一种可能的实现方式中,所述基于所述趋势网格的每个第一节点的种子点参数,确定所述正交网格的每个待插值点的插值参数,包括:
18.对于每个待插值点,确定所述待插值点在所述趋势网格中的目标位置;
19.基于所述目标位置,确定所述趋势网格中与所述目标位置匹配的第一目标范围;
20.基于所述第一目标范围内的每个第一节点的种子点参数,确定所述待插值点的插值参数。
21.在一种可能的实现方式中,所述基于所述第一目标范围内的每个第一节点的种子点参数,确定所述待插值点的插值参数,包括:
22.对于所述第一目标范围内的每个第一节点,确定所述第一节点与所述待插值点的第一目标距离,所述第一目标距离为沿所述趋势网格的距离;
23.基于所述第一目标范围内的每个第一节点的种子点参数和第一目标距离,通过第一关系数据,得到所述待插值点的插值参数,所述第一关系数据为多个种子点参数、多个第一目标距离和插值参数之间的关系数据。
24.在一种可能的实现方式中,所述地质数据包括多个第二节点的种子点参数和每个第二节点的第一坐标;
25.所述基于所述地质数据,确定所述趋势网格的每个第一节点的种子点参数,包括:
26.对于任一第一节点,根据所述任一第一节点的第二坐标,从所述多个第二节点中,确定与所述任一第一节点匹配的第二节点,所述第二节点的第一坐标与所述任一第一节点的第二坐标匹配;
27.基于所述第二节点的种子点参数,确定所述任一第一节点的种子点参数。
28.在一种可能的实现方式中,所述基于所述第二节点的种子点参数,确定所述任一第一节点的种子点参数,包括:
29.在所述第二节点的第一坐标和所述任一第一节点的第二坐标相同的情况下,将所述第二节点的种子点参数赋值给所述任一第一节点的种子点参数;
30.在所述第二节点的第一坐标和所述任一第一节点的第二坐标不相同的情况下,确定所述任一第一节点在所述趋势网格中的第二目标范围,获取所述第二目标范围内的第一节点的种子点参数,确定所述任一第一节点与所述第二目标范围内的第一节点之间的第二目标距离,所述第二目标距离为直线距离;
31.基于所述第二目标范围内的第一节点的种子点参数和第二目标距离,通过第二关系数据,得到所述任一第一节点的种子点参数,所述第二关系数据为第二目标范围内的第一节点的种子点参数、第二目标距离和任一第一节点的种子点参数之间的关系数据。
32.在一种可能的实现方式中,所述基于所述正交网格的每个待插值点的插值参数,生成所述目标地质区域的地质图,包括:
33.连接所述正交网格中插值参数相同的待插值点,得到所述目标地质区域的地质图。
34.另一方面,提供了一种地质图的生成装置,所述装置包括:
35.获取模块,用于获取待成图的目标地质区域的地质数据、边界数据和正交网格;
36.第一确定模块,用于从所述边界数据中,确定所述目标地质区域的两组边界点,每组边界点包括间隔的多个第一节点;
37.第一插值模块,用于对每组边界点进行组内节点插值;
38.第二确定模块,用于基于组内节点插值之后的所述两组边界点,确定所述目标地质区域的多个条形网格,每个条形网格的上下边的两个端点为所述两组边界点中位置对应的两个第一节点;
39.第二插值模块,用于对所述每个条形网格进行网格节点插值,得到多组插值点,每组插值点包括间隔的多个第一节点;
40.第一生成模块,用于基于组内节点插值之后的所述两组边界点和所述多组插值点,生成所述目标地质区域的趋势网格;
41.第三确定模块,用于基于所述地质数据,确定所述趋势网格的每个第一节点的种子点参数;
42.第四确定模块,用于基于所述趋势网格的每个第一节点的种子点参数,确定所述正交网格的每个待插值点的插值参数,所述待插值点为所述正交网格的节点;
43.第二生成模块,用于基于所述正交网格的每个待插值点的插值参数,生成所述目标地质区域的地质图。
44.在一种可能的实现方式中,所述第一生成模块,包括:
45.将组内节点插值之后的每组边界点的相邻第一节点对应连接,以及将相邻的两组插值点中的每个插值点对应连接,生成所述目标地质区域的趋势网格。
46.在一种可能的实现方式中,所述第四确定模块,包括:
47.第一确定单元,用于对于每个待插值点,确定所述待插值点在所述趋势网格中的目标位置;
48.第二确定单元,用于基于所述目标位置,确定所述趋势网格中与所述目标位置匹配的第一目标范围;
49.第三确定单元,用于基于所述第一目标范围内的每个第一节点的种子点参数,确定所述待插值点的插值参数。
50.在一种可能的实现方式中,所述第三确定单元,包括:
51.第一确定子单元,用于对于所述第一目标范围内的每个第一节点,确定所述第一节点与所述待插值点的第一目标距离,所述第一目标距离为沿所述趋势网格的距离;
52.第二确定子单元,用于基于所述第一目标范围内的每个第一节点的种子点参数和第一目标距离,通过第一关系数据,得到所述待插值点的插值参数,所述第一关系数据为多个种子点参数、多个第一目标距离和插值参数之间的关系数据。
53.在一种可能的实现方式中,所述地质数据包括多个第二节点的种子点参数和每个第二节点的第一坐标;
54.所述第三确定模块,包括:
55.第四确定单元,用于对于任一第一节点,根据所述任一第一节点的第二坐标,从所述多个第二节点中,确定与所述任一第一节点匹配的第二节点,所述第二节点的第一坐标与所述任一第一节点的第二坐标匹配;
56.第五确定单元,用于基于所述第二节点的种子点参数,确定所述任一第一节点的
种子点参数。
57.在一种可能的实现方式中,所述第五确定单元,包括:
58.赋值子单元,用于在所述第二节点的第一坐标和所述任一第一节点的第二坐标相同的情况下,将所述第二节点的种子点参数赋值给所述任一第一节点的种子点参数;
59.第三确定子单元,用于在所述第二节点的第一坐标和所述任一第一节点的第二坐标不相同的情况下,确定所述任一第一节点在所述趋势网格中的第二目标范围,获取所述第二目标范围内的第一节点的种子点参数,确定所述任一第一节点与所述第二目标范围内的第一节点之间的第二目标距离,所述第二目标距离为直线距离,基于所述第二目标范围内的第一节点的种子点参数和第二目标距离,通过第二关系数据,得到所述任一第一节点的种子点参数,所述第二关系数据为第二目标范围内的第一节点的种子点参数、第二目标距离和任一第一节点的种子点参数之间的关系数据。
60.在一种可能的实现方式中,所述第二生成模块,包括:
61.连接单元,用于连接所述正交网格中插值参数相同的待插值点,得到所述目标地质区域的地质图。
62.另一方面,提供了一种计算机设备,所述计算机设备包括一个或多个处理器和一个或多个存储器,所述一个或多个存储器中存储有至少一条指令,所述至少一条指令由所述一个或多个处理器加载并执行以实现上述任一实现方式所述的地质图的生成方法所执行的操作。
63.另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储至少一条指令,所述至少一条指令由处理器加载并执行,以实现上述任一实现方式所述的地质图的生成方法所执行的操作。
64.另一方面,提供了一种计算机程序产品或计算机程序,所述计算机程序产品或所述计算机程序包括计算机程序代码,所述计算机程序代码存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取所述计算机程序代码,处理器执行所述计算机程序代码,使得所述计算机设备执行上述的地质图的生成方法所执行的操作。
65.本技术实施例提供的技术方案的有益效果至少包括:
66.本技术实施例提供了一种地质图的生成方法,由于趋势网格是根据边界数据确定的两组边界点进行插值得到的,这样,趋势网格能够代表目标地质区域的趋势走向和特征变化;进而通过趋势网格的种子点参数确定正交网格的插值参数,能够使正交网格的插值参数符合目标地质区域的趋势走向和特征变化,从而基于该插值参数生成的地质图能够符合目标地质区域的趋势走向和特征变化,该方法提高了生成的地质图的准确度。
附图说明
67.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
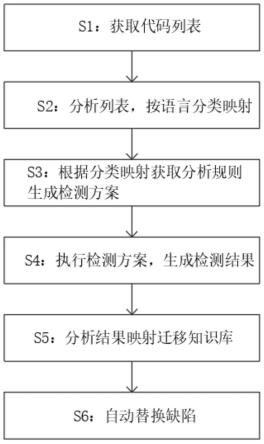
68.图1是本技术实施例提供的一种地质图的生成方法的流程图;
69.图2是本技术实施例提供的一种两组边界点的示意图;
70.图3是本技术实施例提供的一种插值之后的两组边界点的示意图;
71.图4是本技术实施例提供的一种条形网格的示意图;
72.图5是本技术实施例提供的一种插值之后的条形网格的示意图;
73.图6是本技术实施例提供的一种趋势网格的示意图;
74.图7是本技术实施例提供的一种组合网格的示意图;
75.图8是本技术实施例提供的一种第一目标距离的示意图;
76.图9是本技术实施例提供的一种地质图的示意图;
77.图10是本技术实施例提供的一种地质图的示意图;
78.图11是本技术实施例提供的一种地质图的生成装置的框图;
79.图12是本技术实施例提供的一种计算机设备的框图。
具体实施方式
80.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术实施方式作进一步地详细描述。
81.本技术的说明书和权利要求书及所述附图中的术语“第一”、“第二”、“第三”和“第四”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们的任意变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其他步骤或单元。
82.本技术实施例提供一种地质图的生成方法,参见图1,方法包括:
83.步骤101:计算机设备获取待成图的目标地质区域的地质数据、边界数据和正交网格。
84.其中,地质数据包括多个第二节点的种子点参数和每个第二节点的第一坐标;种子点参数可以为目标地质区域的地质高程值、地层孔隙度值或地下深度值等。
85.其中,边界数据包括目标地质区域的边界的多个第二节点的种子点参数和每个第二节点的第一坐标;边界数据的种子点参数的种类与地质数据的种子点参数的种类相同。
86.需要说明的是,正交网格为将目标地质区域进行离散化得到的网格,即将目标地质区域划分由多个矩形横向和纵向交互组成的正交网格;正交网格包括多个节点,正交网格还包括其包括的每个节点的第三坐标。正交网格的比例尺和矩形的尺寸可以根据需要进行设定并更改。
87.步骤102:计算机设备从边界数据中,确定目标地质区域的两组边界点。
88.其中,每组边界点包括间隔的多个第一节点。
89.需要说明的是,每组边界点的第一节点为基于目标地质区域的地质特征,选取的能够用于描述目标地质区域的边界形状的数据点。例如,目标地质区域为某一河道,则河道的每组边界点中的第一节点为河道的边界数据中能够用于描述河道走向趋势的数据点。
90.其中,两组边界点中的第一节点数目相同,即两组边界点中的第一节点一一对应。参见图2,图2包括两组边界点,两组边界点中的第一节点一一对应。
91.步骤103:计算机设备对每组边界点进行组内节点插值。
92.其中,计算机设备在每组边界点的两个第一节点之间进行插值,每两个第一节点
之间插值的节点的数量相同,得到组内节点插值之后的两组边界点。
93.其中,插值的方法为三次样条插值法,在每组边界点的每两个第一节点之间进行三次样条插值,则每两个第一节点之间得到4个插值的第一节点,如图3所示;由图3可知,进行组内节点插值之后的两组边界点中的每个第一节点一一对应,在每组边界点进行组内节点插值后,可得到目标地质区域的轮廓趋势。
94.在本技术实施例中,采用三次样条插值法在对每组边界点进行组内节点插值,得到的多个第一节点之间整体趋势相似,进而能够保证组内节点插值之后的两组边界点进行连接时,得到的网格线相对平滑。
95.步骤104:计算机设备基于组内节点插值之后的两组边界点,确定目标地质区域的多个条形网格。
96.需要说明的是,每个条形网格的上下边的两个端点为两组边界点中位置对应的两个第一节点。计算机设备将两组边界点中位置对应的第一节点两两对应连接,得到多个网格线,将相邻的两个网格线作为条形网格的上下边,组成条形网格,如图4所示;由图4可知,两组边界点中位置对应的两个第一节点一一对应连接后,得到了多个网格线,相邻的两个网格线分别作为条形网格的上下边,组成一个条形网格,由多个网格线得到了多个条形网格。
97.步骤105:计算机设备对每个条形网格进行网格节点插值,得到多组插值点。
98.其中,每组插值点包括间隔的多个第一节点;计算机设备对每个条形网格的上下边进行网格节点插值,得到多组插值点。每个条形网格包括上下边的两组插值点。
99.需要说明的是,网格节点插值的方法为线性插值,即每组插值点的个数相同,每组插值点的每个插值点之间的距离相同。以图5为例,图5中的每个条形网格的上下边上分别有6个插值点,且每个插值点之间的距离相同,进而能够使两组插值点之间的每个插值点一一对应。
100.步骤106:计算机设备基于组内节点插值之后的两组边界点和多组插值点,生成目标地质区域的趋势网格。
101.在一种可能的实现方式中,计算机设备将组内节点插值之后的每组边界点的相邻第一节点对应连接,以及将相邻的两组插值点中的每个插值点对应连接,生成目标地质区域的趋势网格。
102.在另一种可能的实现方式中,计算机设备将相邻的两组插值点中的每个插值点对应连接,未连接组内节点插值之后两组边界点,生成目标地质区域的趋势网格,如图6所示;图6中每组插值点包括6个插值点,将相邻两组插值点中的每个插值点对应连接,则可以得到组成趋势网格的6条连接线,再结合组内节点插值之后的两组边界点,生成目标地质区域的趋势网格。从图6中可以看出,趋势网格中的第一节点的趋势走向符合目标地质区域的趋势走向。
103.步骤107:计算机设备基于地质数据,确定趋势网格的每个第一节点的种子点参数。
104.其中,地质数据包括多个第二节点的种子点参数和每个第二节点的第一坐标。
105.该步骤可以通过以下步骤(1)-(2)实现:
106.(1)计算机设备对于任一第一节点,根据任一第一节点的第二坐标,从多个第二节
点中,确定与任一第一节点匹配的第二节点,第二节点的第一坐标与任一第一节点的第二坐标匹配。
107.(2)计算机设备基于所述第二节点的种子点参数,确定所述任一第一节点的种子点参数。
108.该步骤包括以下两种实现方式:
109.a1:计算机设备在第二节点的第一坐标和任一第一节点的第二坐标相同的情况下,将第二节点的种子点参数赋值给任一第一节点的种子点参数。
110.a2:计算机设备在第二节点的第一坐标和任一第一节点的第二坐标不相同的情况下,确定任一第一节点在趋势网格中的第二目标范围,获取第二目标范围内的第一节点的种子点参数,确定任一第一节点与第二目标范围内的第一节点之间的第二目标距离,第二目标距离为直线距离。计算机设备基于第二目标范围内的第一节点的种子点参数和第二目标距离,通过第二关系数据,得到该任一第一节点的种子点参数。
111.其中,第二关系数据为第二目标范围内的第一节点的种子点参数、第二目标距离和任一第一节点的种子点参数之间的关系数据。第二关系数据为克里金插值公式。
112.计算机设备将第二目标范围内的第一节点的种子点参数、第二目标距离代入第二关系数据中,得到该任一节点的种子点参数。
113.需要说明的是,当第二目标范围内的第一节点的种子点参数可直接由第二节点的种子点参数赋值得到时,第一节点的种子点参数为步骤a1中的得到的种子点参数。当第二目标范围内的第一节点的种子点参数不能直接由第二节点的种子点参数赋值得到时,则基于步骤a2,搜索该第一节点的第二目标范围内的第一节点,基于该目标范围内的第一节点的种子点参数和第二目标距离,通过第二关系数据,得到该第一节点的种子点参数。
114.步骤108:计算机设备基于趋势网格的每个第一节点的种子点参数,确定正交网格的每个待插值点的插值参数,待插值点为正交网格的节点。
115.该步骤可以通过以下步骤(1)-(3)实现:
116.(1)计算机设备对于每个待插值点,确定该待插值点在趋势网格中的目标位置。
117.其中,正交网格和趋势网格的比例尺相同,正交网格相对致密,趋势网格相对稀疏,则可以将趋势网格组合到正交网格上;将正交网格作为第一层网格,趋势网格可以位于正交网格之上,作为第二层网格,进而通过该组合的网格确定该待插值点在趋势网格中的目标位置。
118.参见图7,图7为一种组合的网格的示意图;图中的第一节点1,2
…
15,16组成的网格为趋势网格,下层的相对致密的网格为正交网格,点a为正交网格的一个待插值点。
119.(2)计算机设备基于目标位置,确定趋势网格中与目标位置匹配的第一目标范围。
120.其中,计算机设备事先设置了该目标位置的第二预设距离,确定以该目标位置为原点,以第二预设距离为半径的圆的范围,作为该目标位置的第一目标范围。
121.(3)计算机设备基于第一目标范围内的每个第一节点的种子点参数,确定待插值点的插值参数。
122.该步骤可以通过以下步骤a1-a2实现:
123.a1:计算机设备对于第一目标范围内的每个第一节点,确定该第一节点与待插值点的第一目标距离。
124.需要说明的是,第一目标距离为沿趋势网格的距离。
125.例如,参见图8,图8中的点b为待插值点,第一节点1,2
…
15,16组成的网格为趋势网格第一目标范围内包括的第一节点。以点b与第一节点1为例,点b到第一节点1沿趋势网格的横向距离为d2,纵向距离为d1与d3的和,则点b到第一节点1的第一目标距离为d1与d3的和的平方值,加上d2的平方值后,再开根号得到的值。依此类推,可得到其它第一节点到点b的第一目标距离。
126.a2:计算机设备基于第一目标范围内的每个第一节点的种子点参数和第一目标距离,通过第一关系数据,得到待插值点的插值参数。
127.其中,第一关系数据为多个种子点参数、多个第一目标距离和插值参数之间的关系数据;第一关系数据为克里金插值公式。
128.其中,计算机设备将多个种子点参数和多个第一目标距离代入第一关系数据,得到该待插值点的插值参数。
129.在本技术实施例中,确定的趋势网格中的节点与待插值点之间的第一目标距离为沿趋势网格的趋势距离,并不是传统的欧式距离,这样,在确定待插值点的插值参数时,结合了趋势网格对目标地质区域的地质曲面特征,进而使得到的插值参数与目标地质区域的情况更加吻合,使插值参数更加准确。
130.步骤109:计算机设备基于正交网格的每个待插值点的插值参数,生成目标地质区域的地质图。
131.其中,计算机设备连接正交网格中插值参数相同的待插值点,得到目标地质区域的地质图。
132.在本技术实施例中,地质图为等值线图,以地质数据的种子点参数为地质高程值为例,则地质图为地质高程的等值线图,参见图9。
133.参见图10,图10为与图9对应、基于正交网格确定的待插值点的插值参数,生成的地质高程的等值线图;对比图9和图10可知,通过本技术实施例生成的地质图能更好的描述目标地质区域的趋势走向和变化特征,更符合地质规律,即基于趋势网格确定的待插值点的插值参数生成的地质图更加准确。而图10中未基于趋势网格生成的地质图含有较多的噪点,不能很好的描述目标地质区域的趋势走向和变化特征,准确度低,不符合地质规律。
134.本技术实施例提供了一种地质图的生成方法,由于趋势网格是根据边界数据确定的两组边界点进行插值得到的,这样,趋势网格能够代表目标地质区域的趋势走向和特征变化;进而通过趋势网格的种子点参数确定正交网格的插值参数,能够使正交网格的插值参数符合目标地质区域的趋势走向和特征变化,从而基于该插值参数生成的地质图能够符合目标地质区域的趋势走向和特征变化,该方法提高了生成的地质图的准确度。
135.本技术实施例还提供了一种地质图的生成装置,参见图11,装置包括:
136.获取模块1101,用于获取待生成的目标地质区域的地质数据、边界数据和正交网格;
137.第一确定模块1102,用于从边界数据中,确定目标地质区域的两组边界点,每组边界点包括间隔的多个第一节点;
138.第一插值模块1103,用于对每组边界点进行组内节点插值;
139.第二确定模块1104,用于基于组内节点插值之后的两组边界点,确定目标地质区
域的多个条形网格,每个条形网格的上下边的两个端点为两组边界点中位置对应的两个第一节点;
140.第二插值模块1105,用于对每个条形网格进行网格节点插值,得到多组插值点,每组插值点包括间隔的多个第一节点;
141.第一生成模块1106,用于基于组内节点插值之后的两组边界点和多组插值点,生成目标地质区域的趋势网格;
142.第三确定模块1107,用于基于地质数据,确定趋势网格的每个第一节点的种子点参数;
143.第四确定模块1108,用于基于趋势网格的每个第一节点的种子点参数,确定正交网格的每个待插值点的插值参数,待插值点为正交网格的节点;
144.第二生成模块1109,用于基于正交网格的每个待插值点的插值参数,生成目标地质区域的地质图。
145.在一种可能的实现方式中,第一生成模块1106,包括:
146.将组内节点插值之后的每组边界点的相邻第一节点对应连接,以及将相邻的两组插值点中的每个插值点对应连接,生成目标地质区域的趋势网格。
147.在一种可能的实现方式中,第四确定模块1108,包括:
148.第一确定单元,用于对于每个待插值点,确定待插值点在趋势网格中的目标位置;
149.第二确定单元,用于基于目标位置,确定趋势网格中与目标位置匹配的第一目标范围;
150.第三确定单元,用于基于第一目标范围内的每个第一节点的种子点参数,确定待插值点的插值参数。
151.在一种可能的实现方式中,第三确定单元,包括:
152.第一确定子单元,用于对于第一目标范围内的每个第一节点,确定第一节点与待插值点的第一目标距离,第一目标距离为沿趋势网格的距离;
153.第二确定子单元,用于基于第一目标范围内的每个第一节点的种子点参数和第一目标距离,通过第一关系数据,得到待插值点的插值参数,第一关系数据为多个种子点参数、多个第一目标距离和插值参数之间的关系数据。
154.在一种可能的实现方式中,地质数据包括多个第二节点的种子点参数和每个第二节点的第一坐标;
155.第三确定模块,包括:
156.第四确定单元,用于对于任一第一节点,根据任一第一节点的第二坐标,从多个第二节点中,确定与任一第一节点匹配的第二节点,第二节点的第一坐标与任一第一节点的第二坐标匹配;
157.第五确定单元,用于基于第二节点的种子点参数,确定任一第一节点的种子点参数。
158.在一种可能的实现方式中,第五确定单元,包括:
159.赋值子单元,用于在第二节点的第一坐标和任一第一节点的第二坐标相同的情况下,将第二节点的种子点参数赋值给任一第一节点的种子点参数;
160.第三确定子单元,用于在第二节点的第一坐标和任一第一节点的第二坐标不相同
的情况下,确定任一第一节点在趋势网格中的第二目标范围,获取第二目标范围内的第一节点的种子点参数,确定任一第一节点与第二目标范围内的第一节点之间的第二目标距离,第二目标距离为直线距离,基于第二目标范围内的第一节点的种子点参数和第二目标距离,通过第二关系数据,得到任一第一节点的种子点参数,第二关系数据为第二目标范围内的第一节点的种子点参数、第二目标距离和任一第一节点的种子点参数之间的关系数据。
161.在一种可能的实现方式中,第二生成模块1109,包括:
162.连接单元,用于连接正交网格中插值参数相同的待插值点,得到目标地质区域的地质图。
163.图12示出了本技术一个示例性实施例提供的计算机设备1200的结构框图。该计算机设备1200可以是便携式移动计算机设备,比如:智能手机、平板电脑、mp3播放器(moving picture experts group audio layer iii,动态影像专家压缩标准音频层面3)、mp4(moving picture experts group audio layer iv,动态影像专家压缩标准音频层面4)播放器、笔记本电脑或台式电脑。计算机设备1200还可能被称为用户设备、便携式计算机设备、膝上型计算机设备、台式计算机设备等其他名称。
164.通常,计算机设备1200包括有:处理器1201和存储器1202。
165.处理器1201可以包括一个或多个处理核心,比如4核心处理器、8核心处理器等。处理器1201可以采用dsp(digital signal processing,数字信号处理)、fpga(field-programmable gate array,现场可编程门阵列)、pla(programmable logic array,可编程逻辑阵列)中的至少一种硬件形式来实现。处理器1201也可以包括主处理器和协处理器,主处理器是用于对在唤醒状态下的数据进行处理的处理器,也称cpu(central processing unit,中央处理器);协处理器是用于对在待机状态下的数据进行处理的低功耗处理器。在一些实施例中,处理器1201可以集成有gpu(graphics processing unit,图像处理器),gpu用于负责显示屏所需要显示的内容的渲染和绘制。一些实施例中,处理器1201还可以包括ai(artificial intelligence,人工智能)处理器,该ai处理器用于处理有关机器学习的计算操作。
166.存储器1202可以包括一个或多个计算机可读存储介质,该计算机可读存储介质可以是非暂态的。存储器1202还可包括高速随机存取存储器,以及非易失性存储器,比如一个或多个磁盘存储设备、闪存存储设备。在一些实施例中,存储器1202中的非暂态的计算机可读存储介质用于存储至少一个指令,该至少一个指令用于被处理器1201所执行以实现本技术中方法实施例提供的地质图的生成方法。
167.在一些实施例中,计算机设备1200还可选包括有:外围设备接口1203和至少一个外围设备。处理器1201、存储器1202和外围设备接口1203之间可以通过总线或信号线相连。各个外围设备可以通过总线、信号线或电路板与外围设备接口1203相连。具体地,外围设备包括:射频电路1204、显示屏1205、摄像头组件1206、音频电路1207、定位组件1208和电源1209中的至少一种。
168.外围设备接口1203可被用于将i/o(input/output,输入/输出)相关的至少一个外围设备连接到处理器1201和存储器1202。在一些实施例中,处理器1201、存储器1202和外围设备接口1203被集成在同一芯片或电路板上;在一些其他实施例中,处理器1201、存储器
1202和外围设备接口1203中的任意一个或两个可以在单独的芯片或电路板上实现,本实施例对此不加以限定。
169.射频电路1204用于接收和发射rf(radio frequency,射频)信号,也称电磁信号。射频电路1204通过电磁信号与通信网络以及其他通信设备进行通信。射频电路1204将电信号转换为电磁信号进行发送,或者,将接收到的电磁信号转换为电信号。可选地,射频电路1204包括:天线系统、rf收发器、一个或多个放大器、调谐器、振荡器、数字信号处理器、编解码芯片组、用户身份模块卡等等。射频电路1204可以通过至少一种无线通信协议来与其它计算机设备进行通信。该无线通信协议包括但不限于:万维网、城域网、内联网、各代移动通信网络(2g、3g、4g及5g)、无线局域网和/或wifi(wireless fidelity,无线保真)网络。在一些实施例中,射频电路1204还可以包括nfc(near field communication,近距离无线通信)有关的电路,本技术对此不加以限定。
170.显示屏1205用于显示ui(user interface,用户界面)。该ui可以包括图形、文本、图标、视频及其它们的任意组合。当显示屏1205是触摸显示屏时,显示屏1205还具有采集在显示屏1205的表面或表面上方的触摸信号的能力。该触摸信号可以作为控制信号输入至处理器1201进行处理。此时,显示屏1205还可以用于提供虚拟按钮和/或虚拟键盘,也称软按钮和/或软键盘。在一些实施例中,显示屏1205可以为一个,设置在计算机设备1200的前面板;在另一些实施例中,显示屏1205可以为至少两个,分别设置在计算机设备1200的不同表面或呈折叠设计;在另一些实施例中,显示屏1205可以是柔性显示屏,设置在计算机设备1200的弯曲表面上或折叠面上。甚至,显示屏1205还可以设置成非矩形的不规则图形,也即异形屏。显示屏1205可以采用lcd(liquid crystal display,液晶显示屏)、oled(organic light-emitting diode,有机发光二极管)等材质制备。
171.摄像头组件1206用于采集图像或视频。可选地,摄像头组件1206包括前置摄像头和后置摄像头。通常,前置摄像头设置在计算机设备的前面板,后置摄像头设置在计算机设备的背面。在一些实施例中,后置摄像头为至少两个,分别为主摄像头、景深摄像头、广角摄像头、长焦摄像头中的任意一种,以实现主摄像头和景深摄像头融合实现背景虚化功能、主摄像头和广角摄像头融合实现全景拍摄以及vr(virtual reality,虚拟现实)拍摄功能或者其它融合拍摄功能。在一些实施例中,摄像头组件1206还可以包括闪光灯。闪光灯可以是单色温闪光灯,也可以是双色温闪光灯。双色温闪光灯是指暖光闪光灯和冷光闪光灯的组合,可以用于不同色温下的光线补偿。
172.音频电路1207可以包括麦克风和扬声器。麦克风用于采集用户及环境的声波,并将声波转换为电信号输入至处理器1201进行处理,或者输入至射频电路1204以实现语音通信。出于立体声采集或降噪的目的,麦克风可以为多个,分别设置在计算机设备1200的不同部位。麦克风还可以是阵列麦克风或全向采集型麦克风。扬声器则用于将来自处理器1201或射频电路1204的电信号转换为声波。扬声器可以是传统的薄膜扬声器,也可以是压电陶瓷扬声器。当扬声器是压电陶瓷扬声器时,不仅可以将电信号转换为人类可听见的声波,也可以将电信号转换为人类听不见的声波以进行测距等用途。在一些实施例中,音频电路1207还可以包括耳机插孔。
173.定位组件1208用于定位计算机设备1200的当前地理位置,以实现导航或lbs(location based service,基于位置的服务)。定位组件1208可以是基于美国的gps
(global positioning system,全球定位系统)、中国的北斗系统或俄罗斯的伽利略系统的定位组件。
174.电源1209用于为计算机设备1200中的各个组件进行供电。电源1209可以是交流电、直流电、一次性电池或可充电电池。当电源1209包括可充电电池时,该可充电电池可以是有线充电电池或无线充电电池。有线充电电池是通过有线线路充电的电池,无线充电电池是通过无线线圈充电的电池。该可充电电池还可以用于支持快充技术。
175.在一些实施例中,计算机设备1200还包括有一个或多个传感器1210。该一个或多个传感器1210包括但不限于:加速度传感器1211、陀螺仪传感器1212、压力传感器1213、指纹传感器1214、光学传感器1215以及接近传感器1216。
176.加速度传感器1211可以检测以计算机设备1200建立的坐标系的三个坐标轴上的加速度大小。比如,加速度传感器1211可以用于检测重力加速度在三个坐标轴上的分量。处理器1201可以根据加速度传感器1211采集的重力加速度信号,控制显示屏1205以横向视图或纵向视图进行用户界面的显示。加速度传感器1211还可以用于游戏或者用户的运动数据的采集。
177.陀螺仪传感器1212可以检测计算机设备1200的机体方向及转动角度,陀螺仪传感器1212可以与加速度传感器1211协同采集用户对计算机设备1200的3d动作。处理器1201根据陀螺仪传感器1212采集的数据,可以实现如下功能:动作感应(比如根据用户的倾斜操作来改变ui)、拍摄时的图像稳定、游戏控制以及惯性导航。
178.压力传感器1213可以设置在计算机设备1200的侧边框和/或显示屏1205的下层。当压力传感器1213设置在计算机设备1200的侧边框时,可以检测用户对计算机设备1200的握持信号,由处理器1201根据压力传感器1213采集的握持信号进行左右手识别或快捷操作。当压力传感器1213设置在显示屏1205的下层时,由处理器1201根据用户对显示屏1205的压力操作,实现对ui界面上的可操作性控件进行控制。可操作性控件包括按钮控件、滚动条控件、图标控件、菜单控件中的至少一种。
179.指纹传感器1214用于采集用户的指纹,由处理器1201根据指纹传感器1214采集到的指纹识别用户的身份,或者,由指纹传感器1214根据采集到的指纹识别用户的身份。在识别出用户的身份为可信身份时,由处理器1201授权该用户执行相关的敏感操作,该敏感操作包括解锁屏幕、查看加密信息、下载软件、支付及更改设置等。指纹传感器1214可以被设置在计算机设备1200的正面、背面或侧面。当计算机设备1200上设置有物理按键或厂商logo时,指纹传感器1214可以与物理按键或厂商logo集成在一起。
180.光学传感器1215用于采集环境光强度。在一个实施例中,处理器1201可以根据光学传感器1215采集的环境光强度,控制显示屏1205的显示亮度。具体地,当环境光强度较高时,调高显示屏1205的显示亮度;当环境光强度较低时,调低显示屏1205的显示亮度。在另一个实施例中,处理器1201还可以根据光学传感器1215采集的环境光强度,动态调整摄像头组件1206的拍摄参数。
181.接近传感器1216,也称距离传感器,通常设置在计算机设备1200的前面板。接近传感器1216用于采集用户与计算机设备1200的正面之间的距离。在一个实施例中,当接近传感器1216检测到用户与计算机设备1200的正面之间的距离逐渐变小时,由处理器1201控制显示屏1205从亮屏状态切换为息屏状态;当接近传感器1216检测到用户与计算机设备1200
的正面之间的距离逐渐变大时,由处理器1201控制显示屏1205从息屏状态切换为亮屏状态。
182.本领域技术人员可以理解,图12中示出的结构并不构成对计算机设备1200的限定,可以包括比图示更多或更少的组件,或者组合某些组件,或者采用不同的组件布置。
183.本技术实施例还提供了一种计算机可读存储介质,计算机可读存储介质中存储至少一条指令,至少一条指令由处理器加载并执行,以实现上述任一实现方式的地质图的生成方法所执行的操作。
184.本技术实施例还提供了一种计算机程序产品或计算机程序,计算机程序产品或计算机程序包括计算机程序代码,计算机程序代码存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取计算机程序代码,处理器执行计算机程序代码,使得计算机设备执行上述的地质图的方法所执行的操作。
185.在一些实施例中,本技术实施例所涉及的计算机程序可被部署在一个计算机设备上执行,或者在位于一个地点的多个计算机设备上执行,又或者,在分布在多个地点且通过通信网络互连的多个计算机设备上执行,分布在多个地点且通过通信网络互连的多个计算机设备可以组成区块链系统。
186.本技术实施例提供了一种地质图的生成方法,由于趋势网格是根据边界数据确定的两组边界点进行插值得到的,这样,趋势网格能够代表目标地质区域的趋势走向和特征变化;进而通过趋势网格的种子点参数确定正交网格的插值参数,能够使正交网格的插值参数符合目标地质区域的趋势走向和特征变化,从而基于该插值参数生成的地质图能够符合目标地质区域的趋势走向和特征变化,该方法提高了生成的地质图的准确度。
187.以上仅为本技术的可选实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。