技术特征:
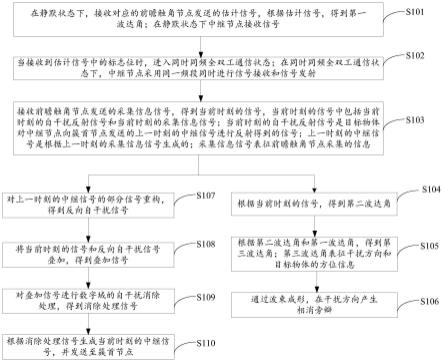
1.一种中继方法,其特征在于,应用于中继节点,所述方法包括:在静默状态下,接收对应的前瞻触角节点发送的估计信号,根据所述估计信号,得到第一波达角;在所述静默状态下所述中继节点接收信号;当接收到所述估计信号中的标志位时,进入同时同频全双工通信状态;在所述同时同频全双工通信状态下,所述中继节点采用同一频段同时进行信号接收和信号发射;接收所述前瞻触角节点发送的采集信息信号,得到当前时刻的信号;所述当前时刻的信号中包括当前时刻的自干扰反射信号和当前时刻的采集信息信号;所述当前时刻的自干扰反射信号是目标物体对所述中继节点向簇首节点发送的上一时刻的中继信号进行反射得到的信号;所述上一时刻的中继信号是根据上一时刻的采集信息信号生成的;采集信息信号表征所述前瞻触角节点采集的信息;根据所述当前时刻的信号,得到第二波达角;根据所述第二波达角和所述第一波达角,得到第三波达角;所述第三波达角表征干扰方向和所述目标物体的方位信息;通过波束成形,在所述干扰方向产生相消旁瓣;对所述上一时刻的中继信号的部分信号重构,得到反向自干扰信号;将所述当前时刻的信号和所述反向自干扰信号叠加,得到叠加信号;对所述叠加信号进行数字域的自干扰消除处理,得到消除处理信号;根据所述消除处理信号生成当前时刻的中继信号,并发送至所述簇首节点。2.根据权利要求1所述的中继方法,其特征在于,所述第二波达角包含所述当前时刻的自干扰反射信号对应的波达角与所述第一波达角;所述根据所述第二波达角和所述第一波达角,得到第三波达角,包括:根据所述第一波达角,从所述第二波达角中识别出所述第三波达角;所述第三波达角表征所述当前时刻的自干扰反射信号对应的波达角。3.根据权利要求1或2所述的中继方法,其特征在于,所述根据所述当前时刻的信号,得到第二波达角,包括:对所述当前时刻的信号进行空间平滑处理,得到平滑处理信号;对所述平滑处理信号进行雷达感知处理,得到所述第二波达角。4.根据权利要求1所述的中继方法,其特征在于,所述对所述上一个中继信号的部分信号重构,得到反向自干扰信号,包括:对所述部分信号进行调相处理,得到调相信号;对所述调相信号进行调幅处理,得到所述反向自干扰信号。5.根据权利要求1所述的中继方法,其特征在于,在所述根据所述估计信号,得到第一波达角之后,且所述对所述上一时刻的中继信号的部分信号重构,得到反向自干扰信号之前,所述方法还包括:对所述上一时刻的中继信号进行拷贝处理,得到所述部分信号。6.一种中继节点,其特征在于,包括:接收阵列天线,用于在静默状态下,接收对应的前瞻触角节点发送的估计信号;当接收到所述估计信号中的标志位时,通过物理信道实时接收所述前瞻触角节点在所述估计信号之后实时发送的采集信息信号,得到当前时刻的信号;采集信息信号表征所述前瞻触角节
点采集的信息;所述当前时刻的信号中包括当前时刻的自干扰反射信号和当前时刻的采集信息信号;所述当前时刻的自干扰反射信号是目标物体对所述中继节点向簇首节点发送的上一时刻的中继信号进行反射得到的信号;所述上一时刻的中继信号是根据上一时刻的采集信息信号生成的;雷达信号处理模块,用于根据所述估计信号,得到第一波达角;根据所述当前时刻的信号,得到第二波达角;根据所述第二波达角和所述第一波达角,得到第三波达角;所述第三波达角表征干扰方向和所述目标物体的方位信息;所述接收阵列天线,还用于通过波束成形,在所述干扰方向产生相消旁瓣;功分器,用于获取所述上一时刻的中继信号的部分信号;模拟域自干扰消除模块,用于对所述部分信号进行重构,得到反向自干扰信号,将所述当前时刻的信号和所述反向自干扰信号进行叠加,得到叠加信号;数字域处理与干扰消除模块,用于对所述叠加信号进行自干扰消除处理,得到消除处理信号;基带处理与转换模块,用于根据所述消除处理信号生成功率放大信号;所述功分器,还用于对所述功率放大信号进行功率分配处理,得到当前时刻的中继信号;发射阵列天线,用于采用与所述发射阵列天线对应的物理信道,向所述簇首节点发送所述当前时刻的中继信号。7.根据权利要求6所述的中继节点,其特征在于,所述模拟域自干扰消除模块,包括:至少一组重构器,每组重构器包括一个调相器和一个调幅器;所述调相器,用于对所述部分信号进行调相处理,得到调相信号;所述调幅器,用于对所述调相信号进行调幅处理,得到所述反向自干扰信号;合成器,用于将所述当前时刻的信号和所述反向自干扰信号进行叠加,得到叠加信号。8.根据权利要求6或7所述的中继节点,其特征在于,所述数字域处理与干扰消除模块,包括:第一处理转换模块,用于对所述叠加信号进行带通滤波处理、放大处理、变频处理、低通滤波处理和信号转换处理,得到数字叠加信号;数字域自干扰消除模块,用于对所述数字叠加信号进行自干扰消除处理,得到消除处理信号。9.根据权利要求6或7所述的中继节点,其特征在于,所述基带处理与转换模块,包括:基带处理模块,用于将所述消除处理信号进行解调解码,得到解码信号,对所述解码信号进行编码调制,得到编码调制信号;第二处理转换模块,用于对所述编码调制信号转换为模拟信号,对所述模拟信号进行变频处理和功率放大处理,得到所述功率放大信号。10.一种无人机通信雷达一体全双工中继传输系统,其特征在于,包括:簇首节点、至少一个簇内节点、至少一个前瞻触角节点,以及与所述至少一个前瞻触角节点对应的至少一个中继节点;所述簇首节点分别与所述至少一个中继节点,以及所述至少一个簇内节点通信连接;前瞻触角节点,用于生成估计信号,以及通过信息采集,得到采集信息信号;向对应的
中继节点发送所述估计信号,在发送所述估计信号之后,向所述对应的所述中继节点实时发送采集信息信号;采集信息信号表征所述前瞻触角节点采集的信息;所述中继节点,用于在静默状态下,接收对应的前瞻触角节点发送的估计信号,根据所述估计信号,得到第一波达角;当接收到所述估计信号中的标志位时,进入同时同频全双工通信状态,实时接收所述前瞻触角节点实时发送的采集信息信号,得到当前时刻的信号,根据所述当前时刻的信号,得到第二波达角;所述当前时刻的信号中包括当前时刻的自干扰反射信号和当前时刻的采集信息信号;所述当前时刻的自干扰反射信号是目标物体对所述中继节点向簇首节点发送的上一时刻的中继信号进行反射得到的信号;所述上一时刻的中继信号是根据上一时刻的采集信息信号生成的;在所述同时同频全双工通信状态下,所述中继节点采用同一频段同时进行信号接收和信号发射;根据所述第二波达角和所述第一波达角,得到第三波达角;所述第三波达角表征干扰方向和所述目标物体的方位信息;通过波束成形,在所述干扰方向产生相消旁瓣;对所述上一时刻的中继信号的部分信号进行重构,得到反向自干扰信号;将所述当前时刻的信号和所述反向自干扰信号叠加,得到叠加信号;对所述叠加信号进行数字域的自干扰消除处理,得到消除处理信号;根据所述消除处理信号生成当前时刻的中继信号,并发送至所述簇首节点;所述簇首节点,用于根据所述当前中继信号生成控制信号,并通过将所述控制信号发送至所述至少有一个簇内节点中的至少部分节点,对所述至少部分节点进行控制。
技术总结
本发明公开了一种无人机通信雷达一体全双工中继传输系统、中继方法及节点,该方法包括:在静默状态下接收前瞻触角节点发送的估计信号,根据估计信号得到第一波达角;在同频全双工通信状态下接收前瞻触角节点发送的采集信息信号,得到当前时刻的信号;根据当前时刻的信号得到第二波达角;当前时刻的信号包含自干扰反射信号和采集信息信号;根据第二波达角和第一波达角,得到表征干扰方向的第三波达角;在干扰方向产生相消旁瓣;对上一时刻的中继信号的部分信号重构得到反向自干扰信号;将当前时刻的信号和反向自干扰信号叠加;对叠加后的信号进行数字域自干扰消除处理,根据消除处理后的信号生成当前时刻的中继信号,并发送至簇首节点。至簇首节点。至簇首节点。
技术研发人员:刘毅 杨普 王涵 张颖薇 师瑞洋 高思佳
受保护的技术使用者:西安电子科技大学
技术研发日:2022.08.29
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。