1.本发明属于骨科外固定技术领域,具体涉及一种骨外固定式动态载荷负重比监测系统及检测方法。
背景技术:
2.骨外固定是一种介于非侵入性外固定和内固定之中的方法,使用六轴并联骨外固定装置的骨科外固定技术,创伤小,操作简单并为骨折断端提供了稳定的固定,具有广阔的应用前景。目前,以taylorspatialframe和truelokhexapodsystem等外固定器为代表的六轴外固定支架已在临床上得到了大量的应用。
3.患者骨折处手术安装六轴并联骨外固定装置,实现骨折畸形矫正后继续携带外固定装置固定骨折。在康复时期,遵循医嘱进行功能锻炼,刺激骨折处愈伤组织生长。患者的骨折愈合达到足够的力学性能后,由医生及时拆除外固定装置并进行后续康复,减少对患者日常生活的负担和对骨生长的影响。如何有效分析患者的骨骼力学性能,进而准确掌握骨折愈合状况,是确定患者是否满足骨外固定装置拆除条件的关键。临床拆除骨外固定器的一般条件为:1、dr影像骨折线消失;2、外固定器关节放松后,患者完全负重功能锻炼一段时间无不适;3、达到特定骨愈合时间。这种拆除条件属于定性标准;使用反映骨骼力学性能的定量标准作为拆除外固定的条件,具有更好的准确性和安全性。例如,专利us5873843和us5437668提出了一类使用计算骨骼承担的载荷的方法,主要包括:将原始固定骨折的外固定装置替换为专用的力检测装置,测量患者患侧骨承担的总载荷,减去力传感装置计算得到的外固定装置承担载荷,计算骨骼承担的载荷;使用患侧骨承担载荷和患侧肢体承担总载荷的比值,反映骨骼的承载能力,评价康复效果。专利cn109077785提出一种基于六轴并联骨外固定装置的骨载荷检测方法,将骨痂轴向变形能与外界载荷做功的比值作为轴向承载性能指标,将骨痂侧向变形能与外界载荷做功的比值作为侧向承载性能指标。
4.现有定量分析骨骼力学性能的方法尚存在如下问题:
5.其一、使患者处于特定姿势,在静态下测量骨折康复评价指标,而骨痂组织的力学性能表现受加载速率等条件的影响较大,因此静态下测量得到的骨折康复评价指标不能直接反应患者日常行走中的骨承载能力。
6.其二、静态测量时施加的骨载荷小于患者日常行走时所受到的骨载荷,静态下骨载荷测量的评价达标后,日常行走时患侧骨受到较大载荷仍可能造成二次骨折。
7.上述问题使骨折后骨骼力学性能的定量检测方法难以评估患者日常行走时的骨承载能力。
技术实现要素:
8.本发明为解决现有技术存在的问题而提出,其目的是提供一种骨外固定式动态载荷负重比监测系统及检测方法。
9.本发明的技术方案是:一种骨外固定式动态载荷负重比监测系统,包括力传感器,
支链载荷传感器模块与采集支链力的力传感器相连,支链载荷传感器模块与支链载荷监测系统相连;地面反力传感模块与采集足底力的足底压力鞋垫相连,地面反力传感模块与地面反力监测系统相连,支链载荷监测系统、地面反力监测系统均接入到动态载荷负重比监测系统中。
10.更进一步的,所述支链载荷监测系统还与支链载荷数据模块相连,支链载荷数据模块读取支链载荷传感器模块和骨痂部位所受的六维外载荷。
11.更进一步的,所述地面反力监测系统还与地面反力数据模块相连,地面反力数据模块读取足底压力信息并进行显示。
12.更进一步的,所述支链载荷传感器模块与信号变送采集模块相连,信号变送采集模块实现数字信号的转换以及上行通讯。
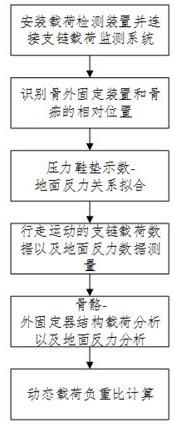
13.一种骨外固定式动态载荷负重比监测系统的检测方法,包括以下步骤:
14.ⅰ
.安装载荷检测装置并连接支链载荷监测系统;
15.ⅱ
.识别骨外固定装置和骨痂的相对位置;
16.ⅲ
.压力鞋垫示数-地面反力关系拟合;
17.ⅳ
.进行行走运动的支链载荷数据以及地面反力数据测量;
18.ⅴ
.进行骨骼-外固定器结构载荷分析;
19.ⅵ
.进行动态载荷负重比计算。
20.更进一步的,步骤
ⅰ
安装载荷检测装置并连接支链载荷监测系统,具体过程如下:
21.首先,拆除原始六轴并联骨外固定装置的六个支链;
22.然后,安装装测力支链,组成载荷检测装置;
23.最后,将载荷检测装置接入到支链载荷监测系统。
24.更进一步的,步骤
ⅲ
压力鞋垫示数-地面反力关系拟合,具体过程如下:
25.首先,用线性函数对所述足底压力鞋垫的测点的压力值与真实地面反力进行拟合;
26.然后,将患者的足底贴上足底压力鞋垫后,分别采用足跟、全足和足尖着地的三种不同姿态,对应足底着地时足跟-全足-足尖接触的三种时间区域;
27.再后,使用体重秤分别对三种时间区域进行地面反力的测量;
28.最后,通过足底压力鞋垫的测点压力值和体重秤示数,拟合三种姿态的映射函数关系。
29.更进一步的,步骤
ⅳ
进行行走运动的支链载荷数据以及地面反力数据测量,具体过程如下:
30.首先,患者在平地采取正常步态行走,使用支链载荷监测系统和地面反力监测系统同步记录六支链的支链载荷数据和足底压力鞋垫的测点压力值;
31.然后,选择确定通讯周期,形成以通讯周期为间隔的离散化载荷数据表;
32.最后,数据表的每一帧对应每次同步测量时刻的支链载荷和足底鞋垫测点压力。
33.更进一步的,步骤
ⅴ
进行骨骼-外固定器结构载荷分析,具体过程如下:
34.首先,根据支链载荷数据,计算骨痂部位所受的六维外载荷;
35.然后,提取线性力沿骨轴线方向的分量f
fr,i
,得到外固定器总载荷的动态变化序列[f
fr,1 f
fr,2 ··· f
fr,m
];
[0036]
再后,根据数据表中的测点压力值,定位肢体每次着地期的脚跟接触至脚尖离地对应的帧位置;
[0037]
再后,确定行走步态每次着地时期的足跟、全足和足尖着地时间区域;
[0038]
最后,分别使用三种姿态的映射函数计算对应时间区域的地面反力,获得数据表每一帧的地面反力,作为结构轴向外载荷的动态变化序列[f
load,1 f
load,2 ··· f
load,m
]。
[0039]
更进一步的,步骤
ⅵ
进行动态载荷负重比计算,具体过程如下:
[0040]
首先,记录测量中外固定器总载荷的动态序列和骨骼-外固定器结构轴向外载荷的动态序列;
[0041]
然后,按照以下公式计算动态序列每一帧j处的载荷负重比η
lbr,j
。
[0042][0043]
本发明的有益效果如下:
[0044]
本发明满足小型化、便携性要求且开发难度和成本低:硬件设计集成度高,满足小型化、便捷性要求。同时其开发难度低,上位机与通讯模块之间通过简单的串口协议进行通讯。
[0045]
本发明与已有的静态条件下的分担比测量方法相比,在行走过程中测量骨的负载与地面反力的比值,可以评价患者日常行走中的骨负载能力。
附图说明
[0046]
图1是本发明的系统框架示意图;
[0047]
图2是本发明的方法流程图;
[0048]
其中:
[0049]
1 动态载荷负重比监测系统
ꢀꢀꢀꢀꢀꢀꢀ
2 支链载荷监测系统
[0050]
3 地面反力监测系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4 支链载荷传感器模块
[0051]
5 支链载荷数据模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6 地面反力传感模块
[0052]
7 地面反力数据模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8 力传感器
[0053]
9 信号变送采集模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10 信号传送模块
[0054]
11 数据分析模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12 图形显示模块a
[0055]
13 足底压力鞋垫
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14 数字转换模块
[0056]
15 信号接收处理模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16 图形显示模块b
[0057]
17 数据记录模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18 信号采集模块
[0058]
19 通讯模块。
具体实施方式
[0059]
以下,参照附图和实施例对本发明进行详细说明:
[0060]
如图1至图2所示,一种骨外固定式动态载荷负重比监测系统,包括力传感器8,支链载荷传感器模块4与采集支链力的力传感器8相连,支链载荷传感器模块4与支链载荷监测系统2相连;地面反力传感模块6与采集足底力的足底压力鞋垫13相连,地面反力传感模块6与地面反力监测系统3相连,支链载荷监测系统2、地面反力监测系统3均接入到动态载
荷负重比监测系统1中。
[0061]
所述支链载荷监测系统2还与支链载荷数据模块5相连,支链载荷数据模块5读取支链载荷传感器模块4和骨痂部位所受的六维外载荷。
[0062]
所述地面反力监测系统3还与地面反力数据模块7相连,地面反力数据模块7读取足底压力信息并进行显示。
[0063]
所述支链载荷传感器模块4与信号变送采集模块9相连,信号变送采集模块9实现数字信号的转换以及上行通讯。
[0064]
具体的,所述地面反力传感模块6与数字转换模块14相连,数字转换模块14记录足底压力鞋垫13的足底压力信息并传送到地面反力数据模块7。
[0065]
具体的,所述支链载荷数据模块5包括用于通讯的信号传送模块10、用于数据分析的数据分析模块11、进行显示的图形显示模块a12。
[0066]
具体的,地面反力数据模块7包括用于接收通讯的信号接收处理模块15、进行图形显示的图形显示模块b16、进行记录的数据记录模块17。
[0067]
一种骨外固定式动态载荷负重比监测系统的检测方法,包括以下步骤:
[0068]
ⅰ
.安装载荷检测装置并连接支链载荷监测系统;
[0069]
ⅱ
.识别骨外固定装置和骨痂的相对位置;
[0070]
ⅲ
.压力鞋垫示数-地面反力关系拟合;
[0071]
ⅳ
.进行行走运动的支链载荷数据以及地面反力数据测量;
[0072]
ⅴ
.进行骨骼-外固定器结构载荷分析;
[0073]
ⅵ
.进行动态载荷负重比计算。
[0074]
步骤
ⅰ
安装载荷检测装置并连接支链载荷监测系统,具体过程如下:
[0075]
首先,拆除原始六轴并联骨外固定装置的六个支链;
[0076]
然后,安装装测力支链,组成载荷检测装置;
[0077]
最后,将载荷检测装置接入到支链载荷监测系统。
[0078]
步骤
ⅲ
压力鞋垫示数-地面反力关系拟合,具体过程如下:
[0079]
首先,用线性函数对所述足底压力鞋垫13的测点的压力值与真实地面反力进行拟合;
[0080]
然后,将患者的足底贴上足底压力鞋垫13后,分别采用足跟、全足和足尖着地的三种不同姿态,对应足底着地时足跟-全足-足尖接触的三种时间区域;
[0081]
再后,使用体重秤分别对三种时间区域进行地面反力的测量;
[0082]
最后,通过足底压力鞋垫13的测点压力值和体重秤示数,拟合三种姿态的映射函数关系。
[0083]
步骤
ⅳ
进行行走运动的支链载荷数据以及地面反力数据测量,具体过程如下:
[0084]
首先,患者在平地采取正常步态行走,使用支链载荷监测系统2和地面反力监测系统3同步记录六支链的支链载荷数据和足底压力鞋垫的测点压力值;
[0085]
然后,选择确定通讯周期,形成以通讯周期为间隔的离散化载荷数据表;
[0086]
最后,数据表的每一帧对应每次同步测量时刻的支链载荷和足底鞋垫测点压力。
[0087]
步骤
ⅴ
进行骨骼-外固定器结构载荷分析,具体过程如下:
[0088]
首先,根据支链载荷数据,计算骨痂部位所受的六维外载荷;
[0089]
然后,提取线性力沿骨轴线方向的分量f
fr,i
,得到外固定器总载荷的动态变化序列[f
fr,1 f
fr,2 ··· f
fr,m
];
[0090]
再后,根据数据表中的测点压力值,定位肢体每次着地期的脚跟接触至脚尖离地对应的帧位置;
[0091]
再后,确定行走步态每次着地时期的足跟、全足和足尖着地时间区域;
[0092]
最后,分别使用三种姿态的映射函数计算对应时间区域的地面反力,获得数据表每一帧的地面反力,作为结构轴向外载荷的动态变化序列[f
load,1 f
load,2 ··· f
load,m
]。
[0093]
步骤
ⅵ
进行动态载荷负重比计算,具体过程如下:
[0094]
首先,记录测量中外固定器总载荷的动态序列和骨骼-外固定器结构轴向外载荷的动态序列;
[0095]
然后,按照以下公式计算动态序列每一帧j处的载荷负重比η
lbr,j
。
[0096][0097]
又一实施例
[0098]
一种骨外固定式动态载荷负重比监测系统,包括支链载荷监测系统2和地面反力监测系统3。所述支链载荷监测系统2用于监测支链的力学信息,并计算得到骨痂部位的外载荷,主要包括支链载荷传感模块4以及支链载荷数据模块5;所述地面反力监测系统3用于监测行走过程中的地面反力信息,主要包括地面反力传感模块6以及地面反力数据模块7。
[0099]
所述支链载荷传感模块4用于将六轴并联骨外固定装置支链力信息转换成数字信号传输给所述支链载荷数据模块,包括力传感器8与信号变送采集模块9。
[0100]
所述力传感器模块8用于在电源激励下将力学信息转换为电流信息。
[0101]
具体的,六轴并联骨外固定装置的六个测力支链分别安装有力传感器8。
[0102]
所述信号变送采集模块9包括信号采集模块18以及通讯模块19。
[0103]
所述信号采集模块19用于将电流信息进行采集和放大,并转化为16位的数字信号,以modbus协议通过rs485串口将数字信号发送给所述通讯模块,进而与上位机进行通讯。
[0104]
所述通讯模块19由rs485转ttl模块及蓝牙模块构成。rs485转ttl模块将信号采集模块发送的rs485信号转换成ttl信号发送给所述蓝牙模块,或将蓝牙模块发送的ttl信号转换成rs485信号发送给信号采集模块。
[0105]
所述支链载荷数据模块5用于读取六支链力传感器模块信息以及骨痂部位所受的六维外载荷,主要包括信号传输模块10、数据分析模块11以及图形显示模块a12。
[0106]
所述支链载荷数据模块5的信号传输模块10采用蓝牙通讯方式发送modbus指令报文至信号变送采集模块,并接收信号变送采集模块返回的modbus应答报文,提取modbus应答报文的特定位,得到六支链的力信息。
[0107]
所述支链载荷数据模块5的数据分析模块11内部嵌入人机耦合力位模型以及骨骼-机器人的坐标系变换模型,可以通过六支链的力信息实时解算骨痂部位所受的六维外载荷。
[0108]
所述支链载荷数据模块5的图形显示模块a12通过图形化仿真显示外固定测力装置的受力状态。
[0109]
所述地面反力传感模块6用于将地面反力信息转换成数字信号传输给所述地面反力数据模块7,包括足底压力鞋垫13及数字转换模块14。
[0110]
所述足底压力鞋垫13由一对压阻鞋垫组成,用于在电源激励下将足底压力信息转换为电流信息。
[0111]
优选的,每只鞋垫在足尖、跖骨区和跟骨区的压力集中区域共设有8个测点。
[0112]
所述数字转换模块14将压阻鞋垫的8个测点压力信号转换为ad值记录在modbus报文中,并通过蓝牙通讯的方式将modbus报文发送至地面反力数据模块7。
[0113]
所述地面反力数据模块7用于接收modbus报文并转换成压力值显示在上位机界面中,主要包括信号接收处理模块15、图形显示模块b16以及数据记录模块17。
[0114]
所述地面反力数据模块7的信号接收处理模块15用于实时接收modbus报文,并提取modbus报文的特定位得到压阻鞋垫的8个测点的ad值,并通过压力-ad值对应数据表得到所述压阻鞋垫的8个测点的压力值。
[0115]
所述地面反力数据模块7的图形显示模块b16通过图形化显示压阻鞋垫的8个测点的压力值。
[0116]
所述地面反力数据模块7的数据记录模块17用于记录行走一段时间内压阻鞋垫的8个测点的压力值。
[0117]
一种骨外固定式动态载荷负重比监测系统的检测方法,包括以下步骤:
[0118]
ⅰ
.安装载荷检测装置并连接支链载荷监测系统;
[0119]
ⅱ
.识别骨外固定装置和骨痂的相对位置;
[0120]
ⅲ
.压力鞋垫示数-地面反力关系拟合;
[0121]
ⅳ
.进行行走运动的支链载荷数据以及地面反力数据测量;
[0122]
ⅴ
.进行骨骼-外固定器结构载荷分析;
[0123]
ⅵ
.进行动态载荷负重比计算。
[0124]
步骤
ⅰ
中,要拆除原始六轴并联骨外固定装置的六个支链并安装测力支链,每条所述测力支链的轴向方向安装有力传感器8,连接力传感器8和支链载荷传感模块4的信号变送采集模块9。
[0125]
步骤
ⅱ
中,要通过在dr影像中划线测量骨痂相对近端固定环与远端固定环的位置。
[0126]
步骤
ⅲ
压力鞋垫示数-地面反力关系拟合,具体过程如下:
[0127]
首先,将患者的足底贴好足底压力鞋垫,打开地面反力数据模块7,连接地面反力传感模块6。
[0128]
然后,被试患肢踩踏体重秤,健肢踩踏与体重秤等高的支撑板。被试扶拐或弃拐站立,患肢分别采用足跟、全足和足尖着地的三种不同姿态,体重秤示数稳定在10kg、15kg、20kg、25kg、30kg、35kg
……
(直到被试能施加的最大值)时,采集每个体重秤载荷示数下,对应的所述压阻鞋垫的8个测点的压力值。
[0129]
再后,用线性函数对足底压力鞋垫的8个测点的压力值与真实地面反力进行拟合。通过所述足底压力鞋垫的8个测点的压力值和体重秤的示数,拟合三种姿态的映射函数关系。
[0130][0131]
由于足底不同接触地面姿态的压力分布区域和大小具有较大差异,不宜采用同一组参数进行测点力值与地面反力的拟合,故按照足跟、全足和足尖接触时间区域设置三组拟合参数。
[0132]
式中,f
ground,s
表示足跟/全足/足尖接触时间区域的体重秤载荷示数,分别对应s=1,2,3;
[0133]
i表示测点1至测点8;αi和pi分别表示测点i的压力权重系数和所述压阻鞋垫的第i个测点的压力值;
[0134]
参数β为线性方程的常数项。
[0135]
对多组测量结果进行上述线性方程的拟合,最终得到足跟、全足和足尖三种触地时间区域内,压力鞋垫测量值与地面反力的映射关系。
[0136]
步骤
ⅳ
进行行走运动的支链载荷数据以及地面反力数据测量,具体过程如下:
[0137]
首先,打开支链载荷数据模块5,连接支链载荷传感模块4,打开地面反力数据模块7,连接地面反力传感模块6。
[0138]
然后,被试者在平地采取正常步态行走,使用支链载荷数据模块5与地面反力数据模块7同步记录骨痂部位所受的六维外载荷和压阻鞋垫的8个测点的压力值,选择100ms作为通讯周期,形成以通讯周期为间隔的离散化载荷数据表。
[0139]
最后,两次测量数据帧之间的间隔δt=100ms。基于数据帧间隔δt,测量总时长为t的数据表共包含m个数据帧,满足关系t=m
·
δt。
[0140]
步骤
ⅴ
进行骨骼-外固定器结构载荷分析,具体过程如下:
[0141]
支链载荷数据模块5的数据分析模块内部嵌入人机耦合力位模型以及骨骼-机器人的坐标系变换模型,通过六支链的力信息实时解算骨痂部位所受的六维外载荷。
[0142]
人机耦合力位模型基于旋量理论,建立支链轴向内力与机器人所受外力的静力映射模型,力平衡方程为:
[0143][0144]
式(3)左侧的fi表示支链i的内力,表示支链i内力的单位力螺旋,右侧fo和mo分别为机器人o点所受合外力的线性力矢量和力矩矢量;∈为对偶标记。
[0145]
骨骼-机器人的坐标系变换模型将o点坐标系变换至骨痂坐标系
[0146]fh
=t
$
(fo ∈mo)
ꢀꢀꢀ
(4)
[0147]
其中,t
$
为旋量参考系变换矩阵。
[0148]
据此,根据支链1-6的轴向内力fs,计算机器人以骨痂部位h-ijk为参考的所受六维外载荷,包括线性力fh和力矩mh。提取线性力沿轴线hk方向的分量f
fr,i
,得到外固定器总载荷的动态变化序列[f
fr,1 f
fr,2 ··· f
fr,m
]。
[0149]
根据数据表中的测点压力值,定位肢体每次着地期的脚跟接触至脚尖离地对应的帧位置,进而确定行走步态每次着地时期的足跟、全足和足尖着地时间区域。
[0150]
基于拟合得到的患者个体化映射函数,分别使用三种姿态的映射函数与计算对应
时间区域的地面反力,获得数据表每一帧的地面反力,作为结构轴向外载荷的动态变化序列[f
load,1 f
load,2 ··· f
load,m
]。
[0151]
步骤
ⅵ
进行动态载荷负重比计算,作为更为精确的实施,具体过程如下:
[0152]
首先,患者重复进行三次行走测量,分析记录每次测量中外固定器总载荷的动态序列和骨骼-外固定器结构轴向外载荷的动态序列。
[0153]
然后,按照式(1)计算动态序列每一帧j处的载荷负重比η
lbr,j
。
[0154][0155]
行走过程的动态载荷负重比为周期性波动曲线,提取每个波动周期k中的负重比峰值η
lbr-peak,k
,选择单次测量过程中的10个最大峰值,再计算其平均数为减小误差,统计三次测量的平均数。
[0156]
动态载荷负重比峰值均数代表患者行走过程中骨痂处的最大载荷承担状态,可反映骨再生组织承担最大动态载荷的力学性能。
[0157]
本发明满足小型化、便携性要求且开发难度和成本低:硬件设计集成度高,满足小型化、便捷性要求。同时其开发难度低,上位机与通讯模块之间通过简单的串口协议进行通讯。
[0158]
本发明与已有的静态条件下的分担比测量方法相比,在行走过程中测量骨的负载与地面反力的比值,可以评价患者日常行走中的骨负载能力。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。