致动器组件
1.领域
2.本技术涉及一种致动器组件,特别是一种包括多段形状记忆合金(sma)线的致动器组件。
3.背景
4.这种致动器组件可用于例如相机中,以在垂直于光轴的方向上移动透镜组件,以提供光学图像稳定(ois)。在这样的相机要被结合到诸如移动电话的便携式电子设备中的情况下,小型化可能是重要的。
5.wo 2013/175197a1描述一种sma致动装置,其使用总共四根sma致动器线来使可移动元件相对于支撑结构在两个正交方向上移动,每根sma致动器线在其两端连接在可移动元件和支撑结构之间并垂直于主轴线延伸。sma致动器线都不是共线的,但是sma致动器线具有这样的布置,在该布置中,sma致动器线能够被选择性地驱动以将可移动元件相对于支撑结构移动到所述移动范围内的任何位置,而不会在围绕主轴线的两个正交方向的平面内对可移动元件施加任何净扭矩。
6.wo2019/243849a1描述了一种形状记忆合金致动装置,其包括支撑结构和可移动元件。将可移动元件支撑在支撑结构上的螺旋支承装置引导可移动元件相对于支撑结构围绕螺旋轴线的螺旋移动。至少一个形状记忆合金致动器线在正交于螺旋轴线的平面内或以与该平面成锐角的方式连接在支撑结构和可移动元件之间,以便驱动可移动元件围绕螺旋轴线旋转,螺旋支承装置将该旋转转换成所述螺旋移动。
7.wo2019/086855a1描述了一种具有致动器组件的相机,该致动器组件包括支撑平台、支撑透镜组件的移动平台、连接到支撑平台和移动平台的sma线、将移动平台支承在支撑平台上的支承件以及在支撑平台和移动平台之间延伸的两个臂。
8.概述
9.根据本发明的第一方面,提供了一种致动器组件。致动器组件包括第一部分、第一支承装置和平台。第一支承装置将平台支撑在第一部分上。平台可围绕第一轴线和/或第二轴线倾斜,第一轴线和/或第二轴线不平行并且垂直于穿过致动器组件的主轴线。致动器组件还包括第二支承装置和第二部分。第二支承装置将第二部分支撑在平台上,使得第二部分与平台一起倾斜。致动器组件还包括驱动装置,该驱动装置包括四段形状记忆合金线。四段形状记忆合金线连接(或“联接”)在致动器组件的第二部分和第一部分之间。第一支承装置被配置为引导平台绕第一轴线和/或第二轴线的倾斜,并约束平台绕主轴线的旋转。该平台限定第一平面,该第一平面是可倾斜的并且具有法线,使得倾斜平台使法线远离主轴线倾斜。第二支承装置被配置为约束第二部分相对于平台的倾斜,约束第二部分垂直于法线的侧向移动,以及引导第二部分相对于平台沿法线的轴向移动。
10.因此,致动器组件可用于使用利用四段形状记忆合金线进行的模块倾斜来提供ois和af。
11.第二支承装置可配置为允许第二部分绕法线旋转。
12.驱动装置可以由四段形状记忆合金线组成。该四段形状记忆合金线可以直接将第
二部分连接或联接到第一部分。
13.四段形状记忆合金线可以被配置为响应于所施加的输入信号而产生平行于第一轴线的第一力、平行于第二轴线的第二力和/或围绕法线的扭矩。
14.每段形状记忆合金线对应于形状记忆合金线的一个区段,在该区段上驱动电流可以被独立地控制。例如,一对形状记忆合金线段可以由单根物理线提供,该物理线具有连接到一端的第一电流源、连接到另一端的第二电流源和在两端之间的点处的电流返回连接。
15.每段形状记忆合金线可以被布置成向具有不平行于(例如大体上垂直于)主轴线的分量的部分施加力。
16.法线可以穿过枢轴点。枢轴点不一定是物理点(例如物体表面上的点),而是可以位于空间中。例如,枢轴点可以响应于第一支承装置的移动和/或变形而移动。
17.平台可以限定第一平面,且第二部分可以限定第二平面。
18.第一轴线和第二轴线可以垂直于主轴线。第一轴线可以垂直于第二轴线。
19.第一支承装置可以包括挠曲装置。挠曲装置可包括从平台延伸的第一对挠曲件,该第一对挠曲件约束所述平台沿第一轴线的移动;以及从平台延伸的第二对挠曲件,该第二对挠曲件约束平台沿第二轴线的移动。
20.平台可以是平坦的。平台可以是大致圆形(即盘)、椭圆形(即椭圆盘或板)或多边形(即多边形板),例如矩形(即矩形板),特别是正方形(即正方形板)。平台可以是刚性的或比挠曲件更刚性的。
21.一个或更多个或所有的挠曲件可以是平坦的。一个或更多个或所有的挠曲件可包括至少一个弯曲部(或“转弯部”或“肘弯”)。一个或更多个或所有的挠曲件可包括相应的臂,该臂可包括至少一个弯曲部。一个或更多个或所有的臂可包括远离平台延伸的第一区部和沿着平台的相应侧延伸的第二区部。第一区部和第二区部可以是直的。
22.当挠曲件未挠曲时,平台和挠曲装置可以是共面的。平台和挠曲装置可以是单个件。
23.第一对挠曲件可从第二部分的相对侧的中点延伸。第二对挠曲件可从第二部分的相对侧的中点延伸。
24.挠曲装置还可以包括四个长形构件,每个挠曲件具有连接到相应的长形构件的相应的远端,在长形构件的第一端和第二端之间(例如在中点处)横向于(例如垂直于)长形构件延伸。因此,挠曲件和对应的长形构件可以形成具有短的柄(挠曲件)和长的顶部杆(长形构件)的“t”形。长形构件可以比挠曲件长且细。例如,长形构件的长度可达到第二部分的侧面的长度。挠曲件和长形构件可以是共面的。
25.第一支承装置可以包括枢轴支承件。枢轴支承件可以包括基座和从基板或第一部分直立的枢轴,枢轴具有远端,其中枢轴的远端被布置成接触平台。相反,枢轴可悬置在第二部分上。枢轴可以包括硅树脂或另一柔性材料。例如,枢轴可以由诸如硅树脂的柔性材料的涂层包围或嵌入诸如硅树脂的柔性材料的块中。
26.第一支承件可以包括导热连杆。
27.枢轴可以是锥形的。枢轴可以是圆柱形的。枢轴可以从基座的中心直立。基座可以是平坦的。基板可以是板。基座可以是框架。例如,框架可以包括网状物(web),该网状物例如包括环形周边框架、中心垫状物和连结周边框架和中心垫状物的构件。基座可以是环形
的。例如,枢轴可以包括环形基座和从环形基座延伸的锥体或棱锥(例如,形成具有围绕其基座的凸缘的锥体或棱锥)。
28.该平台可以成形为向枢轴的远端提供支座。例如,平台可包括用于安置枢轴的远端的盲孔(或“凹部”)、通孔或凹口。平台可包括限定盲孔或凹口的环形凸起。如果枢轴悬置在第二部分上,那么第一部分可以被成形成为枢轴的远端提供支座。
29.第一支承装置可以包括万向架。万向架可包括薄网状物。薄网状物可以是平坦的。网状物(或“网格”)可包括外环、位于外环内的内环以及连结外环和内环以允许内环相对于外环绕给定轴线旋转的第一共线构件和第二共线构件(或“连杆”)。网状物可以包括中心部分以及第三共线构件和第四共线构件,第三共线构件和第四共线构件与第一构件和第二构件不共线,第三共线构件和第四共线构件连结内环和中心部分,以允许中心部分相对于内环绕另一不同轴线旋转。给定轴线可以是第一轴线和第二轴线中的一个,而另一个轴线可以是第一轴线和第二轴线中的另一个。
30.外环可以是圆形、椭圆形或多边形,例如矩形,例如正方形。内环可以是圆形、椭圆形或多边形,例如矩形,例如正方形。中心部分可以是圆形、椭圆形或多边形,例如矩形,如正方形。
31.第二支承装置可配置为将由驱动装置围绕法线施加的扭矩转换为第二部分相对于平台沿法线的移动。
32.第二支承装置可包括螺旋挠曲件。
33.螺旋挠曲件可包括至少三个挠曲臂。可以有四个、五个或更多的挠曲臂。挠曲臂可以在平行于法线的方向上延伸,并在相同方向上围绕法线延伸。螺旋挠曲件可以包括环,并且至少三个挠曲件(例如,五个或更多个挠曲件)可以从环延伸。挠曲臂可以围绕法线以等间距的角度定位。环和挠曲臂可以是单个件。
34.第二支承装置可以包括螺旋支承件。
35.螺旋支承件可以包括限定螺旋路径的支承表面。螺旋支承件可以包括滑动表面,该滑动表面被配置为与支承表面配合并由支承表面引导。螺旋支承件可以包括滚动支承元件,滚动支承元件被布置成由支承表面引导。
36.螺旋支承件可以包括具有内螺纹的外筒体或外环和具有外螺纹的内筒体或内环,其中外筒体或外环和内筒体或内环被螺纹连接。外筒体可由平台固定地支撑,使得内筒体可相对于平台移动。螺旋支承件还可包括从内筒体或内环向外突出超过外筒体或外环的第一臂和第二臂。第一臂和第二臂可以从筒体或环的在直径上相对的侧伸出。第一臂和第二臂可以径向伸出。臂可以采取杆或棒的形式。第一臂和第二臂以及内筒体或内环可以例如通过使分离的部件(即,臂和内筒体)在结构上集成或通过形成为单个件而一体形成。外筒体或外环可包括第一周向扇形槽(或“狭缝”)和第二周向扇形槽(或“狭缝”),第一臂和第二臂分别穿过第一周向扇形槽和第二周向扇形槽。为了便于螺旋支承件的装配,外筒体或外环可以由一个以上的件(例如两个件)形成并围绕内筒体装配。例如,外筒体或外环可以包括两个区段(或“段”),该两个区段在每个区段的一端处连结。一个或两个端部可以设置有(相应的)缺口,使得当端部连结时,形成槽。第一臂和第二臂可以从内筒体的端部伸出或靠近内筒体的端部伸出,在外筒体的外部(换句话说,超出外筒体的端部)。内筒体可由平台固定地支撑,使得外筒体可相对于平台移动。因此,第一臂和第二臂可以从外筒体向外伸出。
第一臂和第二臂可以分别具有相应的远端,并且其中四根形状记忆合金线中的第一形状记忆合金线和第二形状记忆合金线连接到第一臂的远端,且四根形状记忆合金线中的第三形状记忆合金线和第四形状记忆合金线连接到第二臂的远端。形状记忆合金线可以通过压接部连接到臂。
37.一对形状记忆合金线可以由一根形状记忆合金线提供,该形状记忆合金线锚固在其端部之间的点(例如,中点)处,并且具有三个电连接,在每个端部处有一个,并且在端部之间有一个,以便提供两段形状记忆合金线,其中电流是独立可控的。
38.四段形状记忆线中的每一个可以与第一轴线和第二轴线共面。
39.四段形状记忆线中的每一个都不与第一轴线和第二轴线共面。
40.因此,四段形状记忆线可以位于平行于第一平面并且沿着主轴线与第一平面相偏离的第三平面中。
41.使用共面的四根形状记忆线可以帮助降低致动器组件的高度(或“降低”致动器组件的“轮廓”)。使形状记忆线的平面偏离可以允许力在不同的平面中施加到第一平面,从而允许形状记忆线引起平台的倾斜。
42.四段形状记忆合金线可以被配置为响应于所施加的输入信号而产生平行于第一轴线的第一力、平行于第二轴线的第二力和/或围绕法线的扭矩。
43.四段形状记忆线可以相对于垂直于主轴线z的第一平面倾斜。例如,四段形状记忆线可以以10
°
和25
°
之间的角度相对于第一平面倾斜。
44.这可以帮助实现更高的冲程,但可能会导致更少的力。
45.第二支承装置可以被配置为约束第二部分围绕法线的旋转。第二支承装置可以包括线性支承件。
46.线性支承件可以包括平行于法线延伸的一组一个或更多个支承表面,以及一组一个或更多个滑动表面,该滑动表面被配置为由该组一个或更多个支承件引导,其中一个或更多个支承表面和一个或更多个滑动表面仅允许平行于法线的移动。线性支承件可从法线侧向地偏移。例如,线性支承件可以被支撑在平台的拐角处。
47.第二支承装置可包括第一挠曲装置和第二挠曲装置。第一挠曲装置可以包括从第一中心部分平台延伸的第一对挠曲臂和从第一中心部分延伸的第二对挠曲臂,第一对挠曲臂约束平台沿垂直于法线的第三轴线的移动,第二对挠曲臂约束平台沿垂直于法线的第四轴线的移动。第二挠曲装置可以包括从第二中心部分平台延伸的第三对挠曲臂和从第二中心部分延伸的第四对挠曲臂,第三对挠曲臂约束平台沿垂直于法线的第五轴线的移动,第四对挠曲臂约束平台沿垂直于法线的第六轴线的移动,其中第一中心部分和第二中心部分沿法线偏离并且刚性地联接以便一起移动。
48.四段形状记忆线中的每一个可以相对于主轴线倾斜。
49.四段形状记忆线被配置为使得绕第一轴线的旋转和沿第一轴线的移动耦合、绕第二轴线的旋转和沿第二轴线的移动耦合、以及绕主轴线的旋转和沿主轴线的移动耦合。
50.致动器组件还可以包括图像传感器和透镜。图像传感器可以被支撑在平台上或安装到平台,并且透镜可以被支撑在第二部分上或安装到第二部分。可选择地,透镜可以被支撑在平台上或安装到平台,并且图像传感器可以被支撑在第二部分上或安装到第二部分。
51.根据本发明的第二方面,提供了一种系统,该系统包括第一方面的致动器组件、用
于输送驱动电压的电源干线(supply rail)、用于在驱动电压下向相应的形状记忆合金线或相应的成对的形状记忆合金线施加驱动信号的一组开关设备、和用于单独控制开关设备的控制器。
52.控制器可以被配置成分别响应于沿第二轴线和第一轴线的移动而通过施加反旋转来补偿平台围绕第一轴线和第二轴线的旋转。
53.根据本发明的第三方面,提供了一种光学设备。该光学设备包括主体、第一光学元件、第二光学元件和第一方面的致动器组件或第二方面的系统。第一光学元件和第二光学元件大致沿着光轴对准。致动器元件的第一部分相对于主体固定,并且第一光学元件、第二光学元件和第二部分由致动器组件支撑。
54.根据本发明的第四方面,提供了一种方法,包括使用第一方面的致动器组件用于光学图像稳定和/或自动聚焦。
55.根据本发明的第五方面,提供了一种致动器组件。该致动器组件包括第一部分、可相对于第一部分倾砖的平台、被布置成可与平台一起倾斜并可相对于可倾斜部分沿轴线(或“倾斜的轴线”)往复运动(或“可平移”)的第二部分和四段形状记忆合金线,该形状记忆合金线布置成响应于驱动信号而引起平台和第二部分相对于第一部分的倾斜和/或引起第二部分相对于可倾斜部分的往复运动。
56.第二部分可以在其往复运动时绕轴线旋转。
57.根据本发明的第六方面,提供一种相机系统,包括第五方面的致动器组件、图像传感器和透镜系统。图像传感器由平台和第二部分中的一个支撑或被安装到平台和第二部分中的一个,并且透镜系统由平台和第二部分中的另一个支撑或被安装到平台和第二部分中的另一个。因此,图像传感器和透镜系统可相对于彼此移动。
58.根据本发明的第七方面,提供了一种电子设备,例如手持通信设备,包括第一方面的致动器组件、第二方面的系统、第三方面的光学设备、第五方面的致动器组件和/或第六方面的相机系统。
59.术语“形状记忆合金(sma)线”(或“sma线段”)可以指任何包括sma的元件。sma线可以具有适合于本文所述目的的任何形状。sma线可以是长形的,并且可以具有圆化的(round)横截面或任何其他形状的横截面。横截面可以沿sma线的长度变化。还可能的是,sma线的长度(无论定义如何)也可以与其其他尺寸中的一个或更多个相似。sma线可以是柔顺的,或者换句话说,是柔性的。在一些示例中,当在两个元件之间以直线连接时,sma线只能施加将两个元件推到一起的拉力。在其他示例中,sma线可以围绕元件弯曲,并且当sma线在张力下趋于伸直时,可以向元件施加力。sma线可以是梁状的或刚性的,并且能够对元件施加不同的(例如非拉伸)力。sma线可以包括也可以不包括非sma的材料和/或部件。例如,sma线可以包括sma芯和非sma材料的涂层。除非上下文另有要求,否则术语“sma线”可指充当单个致动元件的sma线的任何构型,例如,该致动元件可被单独控制以在元件上产生力。例如,sma线可以包括机械地并联和/或串联布置的两个或更多个sma线部分。在一些布置中,sma线可以是较大的一根sma线的一部分。该较大的一根sma线可以包括单独可控的两个或更多个部分,从而形成两根或更多根sma线。
60.附图简述
61.现在将参考附图仅以示例的方式描述本发明的某些实施例,在附图中:
62.图1是包含形状记忆合金(sma)致动器组件的相机的示意图;
63.图2示意性地示出了可由sma致动器组件提供的可能的自由度;
64.图3是可用于sma致动器组件中的第一类型的驱动装置的示意性平面图;
65.图4是采用图3所示的第一类型的驱动装置的第一sma致动器组件的透视图;
66.图5a是可用于sma致动器组件中的第二类型的驱动装置的示意性平面图;
67.图5b和5b是图5a'中所示的第二类型的驱动装置的示意性侧视图和端视图;
68.图6是两杆式连杆支承件的示意性侧视图;
69.图7a是第一平行二乘二杆连杆支承件(或“单一挠曲件”)的平面图;
70.图7b是在图7a中示出的单一挠曲件的侧视图;
71.图8是第二单一挠曲件的平面图;
72.图9是z形挠曲件的分解投影;
73.图10是第一枢轴支承件的投影;
74.图11a是在图10中示出的第一枢轴支承件的侧视图;
75.图11b是第二枢轴支承件的侧视图;
76.图11c是第三枢轴支承件的侧视图;
77.图11d是第四枢轴支承件的侧视图;
78.图12a是第一平面支承件的侧视图;
79.图12b是图12a所示的第一平面支承件的分解投影图;
80.图13是第二平面支承件的侧视图;
81.图14是第一万向架支承件的平面图;
82.图15是第二万向架支承件的平面图;
83.图16a是z形平移支承件的分解投影;
84.图16b是图16a所示的块和支承件的横截面图;
85.图17是螺旋挠曲支承件的透视图;
86.图18a是螺旋支承件的分解投影;
87.图18b是图18a所示的螺旋支承件的投影;
88.图19是第一致动器组件的示意性分解投影;
89.图20是图19所示的第一致动器组件的示意性平面图;
90.图21是图20所示的第一致动器组件的沿a-a'线截取的示意性横截面图;
91.图22是图19所示的第一致动器组件的示意性框图;
92.图23是第二致动器组件的示意性框图;
93.图24示意性地示出平台所在的第一平面的倾斜和第二部分所在的第二平面的倾斜;
94.图25示意性地示出了当倾斜时图24所示的第二平面沿第一平面的法线的移动;
95.图26是第三致动器组件的示意性分解投影;
96.图27是图24所示的第三致动器组件的示意性侧视图;
97.图28是图24所示的第三致动器组件的示意性框图;和
98.图29是第四致动器组件的示意性分解投影。
99.详细描述
100.相机
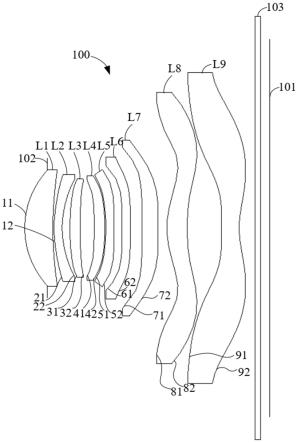
101.参照图1,示出了结合了sma致动器组件2(这里也称为“sma致动器”或简称为“致动器”)的相机1。
102.相机1包括第一部分3和第二部分4。
103.相机的第一部分3采取支撑结构的形式并且包括基座5。相机的第二部分4采取由sma致动器组件2悬置在相机1的第一部分3上的透镜组件的形式。
104.图像传感器6设置在基座5的前侧的前方,即图像传感器6介于透镜组件4和基座5之间。
105.sma致动器组件2以允许透镜组件4相对于支撑结构3的一个或更多个自由度的方式支撑透镜组件4和图像传感器6。透镜组件4具有光轴o。
106.相机1包括实施控制电路的集成电路(ic)7,并且还包括陀螺仪传感器(未示出)。支撑结构3还包括从基座5向前突出的包壳(can)8,以包住和保护相机1的其他部件。
107.透镜组件4包括支撑沿光轴o布置的两个透镜10的呈圆柱形主体形式的透镜托架9。通常可以包括任何数量的一个或更多个透镜10。优选地,每个透镜10具有高达约20mm的直径。因此,相机1可以称为微型相机。
108.透镜组件4被布置成将图像聚焦到图像传感器6上。图像传感器6捕捉图像并且可以是任何合适的类型,例如电荷耦合设备(charge-coupled device,ccd)或互补金属氧化物半导体(complementary metal-oxide-semiconductor,cmos)设备。
109.透镜10被支撑在透镜托架9上,并且透镜托架9由sma致动器组件2支撑,使得透镜组件4可相对于支撑结构3沿光轴o移动,例如以提供聚焦或变焦。虽然在本示例中所有透镜10都固定到透镜托架9,但通常,透镜10中的一个或更多个可以安装到除透镜托架9以外的部件,并且可以相对于图像传感器6固定在适当的位置,使透镜10中的至少一个附接到透镜托架并相对于图像传感器6沿着光轴o可移动。
110.通常,在使用中,透镜组件4可相对于图像传感器6正交于光轴o移动,其效果是图像传感器6上的图像被移动。例如,如果一组右手正交轴线x、y、z排列成使得第三轴线z大体上平行于光轴o定向,则透镜组件4可在平行于第一轴线x的方向和/或平行于第二轴线y的方向上可移动。这用于提供光学图像稳定(ois),补偿可能由手抖等引起的相机1的移动。提供ois的移动不需要被限制于x-y平面。另外或可选择地,可以通过围绕平行于第一轴线x的轴线和/或围绕平行于第二轴线y的轴线倾斜透镜组件4或透镜组件4和图像传感器6两者来提供ois功能。此外,透镜组件4或其至少一个透镜10可平行于光轴o(平行于第三轴线z)移动,以提供形成在图像传感器6上的图像的聚焦,例如作为自动聚焦(af)功能的一部分。
111.本说明书涉及sma致动器组件2的示例,其提供基于相对于支撑结构3倾斜透镜组件4和图像传感器6的自动聚焦(af)和光学图像稳定(ois)的组合。
112.自由度
113.还参考图2,示出了可由sma致动器组件2提供的可能的移动类型(或自由度)。
114.第一自由度(dof)tx对应于平行于第一轴线x的移动。第二dof ty对应于平行于第二轴线y的移动。第三dof tz对应于平行于第三轴线z的移动,第三轴线z大体上平行于光轴o定向。第三dof tz对应于透镜组件3朝向或远离图像传感器6的移动。第一轴线x、第二轴线y和第三轴线z形成右手笛卡尔坐标系。第四dof rx对应于围绕平行于第一轴线x的轴线的
旋转。第五dof ry对应于围绕平行于第二轴线y的轴线的旋转。第六dof rz对应于围绕平行于第三轴线z的轴线的旋转。在一些示例中,轴线中的一个或更多个可附属于sma致动器组件2或相机1的第一部分、第二部分或任何其他元件(并与sma致动器组件2或相机1的第一部分、第二部分或任何其他元件一起移动和/或旋转/倾斜)。例如,原点可以是相机1的元件,例如图像传感器6或透镜组件4的透镜10。
115.透镜组件4相对于支撑结构3的运动可分解为第一至第六dof(移动)tx、ty、tz、rx、ry、rz中的任一种或全部的分量。虽然被描述为自由度,但在某些情况下,平移和旋转可以是关联的。例如,沿着第三轴线z的给定平移tz可以与对应的旋转rz相联系,使得透镜组件4的运动是螺旋的。可以使用方括号括起来的一对来指代这种关联运动,以避免与更独立的运动混淆,例如[tz,rz]将表示下文所述的螺旋运动。
[0116]
本说明书涉及sma致动器组件2,其提供对应于第四dof rx和第五dof ry的运动和关联的螺旋运动[tz,rz]。第四dof rx和第五dof ry在本文提供ois功能,而平行于第三轴线z的运动[tz,rz]提供af功能。其它运动受本文所述的sma致动器组件2的约束。
[0117]
形状记忆合金驱动组件
[0118]
还参考图3,示意性地示出了可包括在sma致动器组件2中的第一类型的驱动装置11。
[0119]
第一驱动装置11包括第一结构12和第二结构13。第二结构13通常被支撑在由第一结构12限定的边界内,例如使用下文所述的一个或更多个支承件。第二结构12通常不需要提供完整的或不间断的边界。第一结构12和第二结构13可以采取相应的图案化金属片材(例如蚀刻或机械加工的不锈钢)的形式,并且其可以涂覆有电绝缘介电材料。
[0120]
四根sma线141、142、143、144(以点划线示出以有助于可见性)围绕第二结构13形成一圈。第一sma线141和第三sma线143大体上平行于第一轴线x延伸并且在平行于第二轴线y的方向上间隔开。第一sma线141的收缩将在负-x方向上对第二结构13施加力,而第三sma线143的收缩将在正 x方向上对第二结构13施力。第二sma线142和第四sma线144大体上平行于第二轴线y延伸并且在平行于第一轴线x的方向上间隔开。第二sma线142的收缩将在负-y方向上对第二结构13施加力,而第四sma线144的收缩将在正 y方向上对第二结构13施加力。
[0121]
可以使用其他示例构型,并且在wo 2017/055788a1和wo2019/086855a1中提供了进一步的细节,这些申请通过该引用以其整体并入本文。
[0122]
通过选择性地改变sma线141、142、143、144的温度来控制第二结构13相对于第一结构12的垂直于光轴o的位置。这是通过将选择性驱动信号传送经过sma线141、142、143、144从而提供电阻加热来实现的。加热通过驱动电流来直接提供。冷却通过减小或停止驱动电流来提供,以允许sma线141、142、143、144通过与其周围环境的传导、对流和辐射来冷却。
[0123]
在操作中,sma线141、142、143、144被选择性地驱动以使第二结构13相对于第一结构12(或第一结构12相对于第二结构13)在任何侧向方向(即,在平行于第一轴线x和第二轴线y且垂直于光轴o和第三轴线z的平面内的方向)上移动。
[0124]
进一步的细节也在wo 2013/175197a1中提供,其通过该引用并入本文。
[0125]
以一组四根sma线141、142、143、144为例,sma线141、142、143、144在围绕光轴o(这里对应于第三轴线z)的不同角度位置处布置成一圈,以提供大体上相互垂直的两对相对的sma线141&143、142&144。因此,每对相对的sma线141&143、142&144能够选择性地驱动第二结构
13在与光轴o正交的两个垂直方向中的一个方向上移动。因此,sma线141、142、143、144能够被选择性地驱动,以将第二结构13相对于第一结构12移动到与光轴o正交的平面内的移动范围内的任何位置。观察该移动的另一种方式是任何一对相邻sma线(例如,sma线143、144)的收缩将使第二结构13在平分该对sma致动器线的方向上(在图3中对角地)移动。此外,sma线141、142、143、144能够被驱动以产生绕平行于主轴线z的轴线的扭矩。特别地,一对相对的sma线(例如,sma线141、143)的收缩将在第二结构13上在一个方向上产生绕平行于主轴线z的轴线的扭矩,并且另一对相对的sma线(例如,sma线142、144)的收缩将产生另一个方向上的扭矩。扭矩的产生和由此产生的旋转可以至少在驱动装置11的运动范围的一部分上大体上独立于沿平行于第一轴线x和/或第二轴线y的方向的平移。运动范围的大小取决于sma线141、142、143、144在其正常操作参数内的几何形状和收缩范围。
[0126]
在加热sma线141、142、143、144之一时,sma线141、142、143、144中的应力增加并且sma线收缩,导致第二结构13相对于第一结构12移动。随着sma的温度在发生sma材料从马氏体相向奥氏体相转变的温度范围内增加,会出现一系列移动。相反,在冷却sma线141、142、143、144中的一个使得sma线141、142、143、144中的应力减小时,该sma线在来自sma线141、142、143、144中的相对的sma线的力(在一些例子中,还有来自一个或更多个诸如弹簧、电枢等的偏置装置的偏置力)的作用下扩张。这允许第二结构13相对于第一结构12在相反的方向上移动。
[0127]
sma线141、142、143、144可以由任何合适的sma材料(例如镍钛诺或另一种钛合金sma材料)制成。
[0128]
用于sma线141、142、143、144的驱动信号由在ic 7中实施的控制电路产生和提供。例如,如果第一结构12固定到支撑结构3(或支撑结构3的一部分)并且第二结构13固定到透镜组件4(或透镜组件4的一部分),则由控制电路响应于陀螺仪传感器(未示出)的输出信号产生驱动信号,以驱动透镜组件4移动,以稳定由透镜组件4聚焦在图像传感器6上的图像,从而提供ois。驱动信号可以使用电阻反馈控制技术来产生,例如,如wo2014/076463a1中所描述的,wo2014/076463a1通过该引用并入本文。
[0129]
还参考图4,示出了实施第一驱动装置11的“平”sma致动器组件15的示例。
[0130]
在平致动器组件15中,第一结构12采取具有矩形外周界(或“外边缘”)和圆形内周界(或“内边缘”)的平环形板16的形式,而第二结构13采取具有矩形外周界和圆形内周界的平的薄环形片材17的形式。板16形式的第一结构12被支撑在矩形板形式的基座5上。四根sma线141、142、143、144各自在一端处附接到相应的第一压接部(crimp)181、182、183、184(也称为“静态”压接部),该第一压接部固定地附接到第一结构12、16(或形成为第一结构12、16的一部分)。每根sma线141、142、143、144的另一端附接到相应的第二压接部191、192、193、194(也称为“移动”压接部),该第二压接部固定地附接到第二结构13、17(或形成为第二结构13、17的一部分)。
[0131]
板16和片材17可以各自采取相应的图案化金属片材(例如蚀刻或机械加工的不锈钢)的形式,并且可以涂覆有电绝缘介电材料。板16和片材17各自设置有与光轴o对准的相应中心孔,允许光从安装到片材17的透镜组件4传递到支撑在基座5上的图像传感器6(图4中未示出-参见图1)。
[0132]
四根sma线141、142、143、144可以垂直于光轴o或以小角度相对于垂直于光轴o的平面倾斜。通常,在一组中,四根sma线141、142、143、144是非共线的。
[0133]
平致动器组件15包括围绕光轴o间隔开的多个滑动支承件(图4中未示出),以将第二结构13、17支承在第一结构12、16上。优选地,使用至少三个支承件以帮助提供稳定的支撑,但是通常可以使用不同数量的支承件。每个滑动支承件(图4中未示出)可以采取圆柱体形式的支承构件的形式,并且可以附接到第一结构12或形成为第一结构12的一部分。滑动支承件(图4中未示出)可以由适当的金属或合金(例如具有类金刚石碳涂层的磷青铜或不锈钢)制成。滑动支承件(图4中未示出)可以由聚合物制成,或者可以包括聚合物的上层涂层,聚合物诸如聚甲醛(pom,缩醛)、聚四氟乙烯(ptfe)或ptfe浸渍的pom。
[0134]
平致动器组件15通常还将包括偏置装置(未示出),诸如一个或更多个弹簧或挠曲臂,其被布置和配置为当sma线141、142、143、144未被通电时保持第一结构12和第二结构13接触(经由滑动支承件)和/或朝向中立的(例如中央)相对位置推动第一结构12和第二结构13。
[0135]
与制造类似于平致动器组件15的致动器组件相关的细节可以在wo2016/189314a1中找到,wo2016/189314a1通过引用以其整体并入本文。
[0136]
虽然在图4中未示出,但是平致动器组件15可以设置有端部止挡件,以提供对第二结构13相对于第一结构12的侧向移动的限制。以这种方式,可以保护sma线141、142、143、144免于由例如结合有平致动器组件15的设备(未示出)可能受到(例如掉落)的撞击而导致的过度伸展。
[0137]
第一驱动装置11可以驱动沿第一轴线x和/或第二轴线y的平移tx、ty以及绕平行于第三轴线z(第三轴线z大体上平行于光轴o)的轴线的旋转rz。然而,为了提供平行于第三轴线z的平移tz,第一驱动装置11必须与至少一个支承件组合,该支承件能够将围绕光轴o施加的扭矩转换为旋转rz和平移tz的组合(螺旋移动)。
[0138]
还参考图5a至图5c,示意性地示出了可包括在sma致动器组件2中的第二类型的驱动装置20。
[0139]
第二驱动装置20类似于第一驱动装置11,除了第一结构12包括基座21和一对第一直立支柱221和第二直立支柱222且sma线141、142、143、144大体上不局限于垂直于第三轴线z的平面。
[0140]
图5a示出了沿着平行于第三轴线z的方向从上方观察的第二驱动装置20。
[0141]
图5b示出了沿着平行于第一轴线x的方向从侧面观察的第二驱动装置20。注意,尽管第四sma线144在很大程度上被遮挡在第二结构13的后面,但是出于视觉目的,第四sma线144已经叠加在图5b上。
[0142]
图5c示出了沿着平行于第二轴线y的方向从侧面观察的第二驱动装置20。注意,尽管第一sma线141在很大程度上被遮挡在第二结构13的后面,但是出于视觉目的,第一sma线141已经叠加在图5b上。
[0143]
当沿着第三轴线观察时(图5a),基座21延伸超过第二结构13的边缘,并且在该示例中为矩形(或正方形)。第一支柱221从基座21的第一拐角直立且第二支柱222从第二拐角直立,第一支柱221和第二支柱222在横跨第二结构13的斜对角上相对。
[0144]
第一sma线141从第二结构13的下部(沿着z轴线较低)连接到第一支柱221的上部(沿着z轴线较高)。第二sma线142从第二结构13的上部连接到第二支柱222的下部。第三sma线143从第二结构13的下部连接到第二支柱222的上部。第四sma线142从第二结构13的上部
连接到第一支柱221的下部。
[0145]
以这种方式,第一sma线141与第三sma线143在平行于第一轴线x的方向上相对,第二sma线142与第四sma线144在平行于第二轴线y的方向上相对,并且第一sma线141和第三sma线143与第二sma线142和第四sma线144在平行于第三轴线z的方向上相对。
[0146]
以这种方式,第二驱动装置20使用四个成角度的(非共面的)sma线141、142、143、144可以提供对应于tx、ty、tz、rx、ry、rz运动的驱动。运动不是完全独立的自由度,并且通常平移将与旋转相关联,例如[tx,rx]、[ty,ry]和[tz,rz],具体的联接取决于sma线141、142、143、144的角度。
[0147]
sma线141、142、143、144优选地相对于垂直于主轴线z的平面以10
°
和25
°
之间的角度倾斜。
[0148]
第一结构12、21和第二结构13中的任一个或两者可以包括中心孔,以允许来自透镜组件4的光在图像传感器6上形成图像。
[0149]
由第一驱动装置11或第二驱动装置20驱动的运动中的一个或更多个可以通过联接第一结构12和第二结构13之间的一个或更多个支承件来完全或部分地约束。
[0150]
支承件
[0151]
一般而言,根据本说明书的sma致动器2将包括第一驱动装置11和第二驱动装置20中的至少一个,以及一个或更多个机械支承件的装置(也称为“支承装置”),用于支撑、约束和/或转换由第一驱动装置11或第二驱动装置20产生的移动。
[0152]-两杆式连杆支承件-[0153]
还参考图6,示出了两杆式连杆支承件1001。
[0154]
两杆式连杆支承件1001包括第一刚性部分10021和第二刚性部分10022,该第一刚性部分10021和第二刚性部分10022通过第一梁部分10031和第二梁部分10032(也称为挠曲件)连接。刚性部分10021、10022各自在平行于第一轴线x的方向上是长形的,并且在平行于第二轴线y的方向上彼此间隔开。梁部分10031、10032各自在平行于第二轴线y的方向上是长形的,并且在平行于第一轴线x的方向上彼此间隔开。梁部分10031、10032被示出为垂直于刚性部分10021、10022,然而,这不是必须的,并且任何角度都可起作用,只要梁部分10031、10032彼此平行。梁部分10031、10032不能围绕与刚性部分10021、10022的接头旋转,例如,连接不是销接的或类似的连接。
[0155]
梁部分10031、10032和刚性部分10021、10022的相对抗弯刚度选择成(主要使用横截面的尺寸和形状)使得如果第一刚性部分10021被夹紧,则第二刚性部分10022可以经由梁部分10031、10032在x-y和/或x-z平面中的弯曲相对于第一刚性部分10021移动。以这种方式,两杆式连杆1001能够提供相对移动tx、tz、rx和/或ry,以用于第一刚性部分10021和第二刚性部分10022之间的相对运动。第二刚性部分10022被平行于第一轴线移位距离d的变形状态也在图6中用虚线示出。两杆式连杆支承件1001可以旋转90度以提供平行于第二轴线y的移动ty而不是tx。
[0156]
可以通过使用梁部分10031、10032的横截面形状以选择相对抗弯刚度来控制x-y与y-z平面中的相对弯曲阻力。
[0157]-单一挠曲件-[0158]
还参考图7a,示出了二乘二平行杆连杆支承件1004(也称为单一挠曲件)。
[0159]
单一挠曲件1004包括中心部分1005和两对梁部分(或挠曲件)10061、10062、10063、10064。每个梁部分(或挠曲件)10061、10062、10063、10064在一端刚性地连接到中心部分1005,并且具有第二自由端10071、10072、10073、10074。在一些示例中,中心部分1005还可以具有中心孔1009(图8)。第一梁部分(挠曲件)10061和第三梁部分(挠曲件)10063在平行于第一轴线x的方向上是长形的,并且能够例如通过在x-z平面中的梁弯曲而变形。类似地,第二梁部分(挠曲件)10062和第四梁部分(挠曲件)10064在平行于第二轴线y的方向上是长形的,并且能够例如通过在y-z平面中的梁弯曲而变形。梁部分(或挠曲件)10061、10062、10063、10064侧向(垂直于第三轴线z)的偏转由所有梁部分(或挠曲件)10061、10062、10063、10064到中心部分1005的连接和/或通过梁部分10061、10062、10063、10064的横截面形状来约束。
[0160]
以这种方式,如果自由端1007被夹紧,则单一挠曲件1004能够在中心部分1005和夹紧的自由端1007之间提供相对移动tz、rx和/或ry。
[0161]
还参考图7b,示出了图7a的单一挠曲件的变形状态1004b,其中,中心部分1005平行于第三轴线z移位距离d。
[0162]
还参考图8,示出了第二单一挠曲件(可倾斜的z形挠曲件)1008。
[0163]
第二单一挠曲件1008与单一挠曲件1004相同,除了中心部分1005包括中心孔1009且梁部分10061、10062、10063、10064的未连接到中心部分1005的端部连接到外环1010并且梁部分10061、10062、10063、10064是弯曲的而不是直的。第二单一挠曲件1008以与单一挠曲件1004大体相同的方式起作用。特别地,如果外环被夹紧,那么中心部分1005可以以tz、rx和/或ry移动。
[0164]
第二单一挠曲件1008或单一挠曲件1004中的中心孔1009的存在或不存在可取决于设备(例如相机1)内的位置。位于图像传感器6下方的单一挠曲件1004、1008通常不需要中心孔1009,而位于图像传感器6上方的单一挠曲件1004、1008通常需要中心孔1009。
[0165]-z形挠曲件-[0166]
还参考图9,示出了z形挠曲件1011。
[0167]
z形挠曲件包括一对单一挠曲件10041、10042,该对单一挠曲件10041、10042垂直于第三轴线z设置(当未变形时),并且通过夹置在该对单一挠曲件10041、10042之间的刚性结构1012在平行于第三轴线z的方向上间隔开。单一挠曲件10041、10042固定到刚性结构1012的相对的面。单一挠曲件10041、10042各自包括中心孔1009。图9中的图示为了视觉的目的示出了固定到单一挠曲件中的一个挠曲件10041并且与另一个单一挠曲件10042分离的刚性结构1012,然而在使用中两个单一挠曲件10041、10042都固定到刚性结构1012。图9中的虚线示出刚性结构1012的投影轮廓。
[0168]
以这种方式,每个单一挠曲件10041、10042的每个单独的梁部分1006可偏转。然而,单一挠曲件10041、10042平行于第三轴线z的分离开和经由刚性结构1012的固定连接约束除了平行于第三轴线z的移动tz之外的所有移动tz、rx、ry。
[0169]
在该示例中,刚性结构1012是具有等于中心孔1009的直径的内径的中空圆柱体。然而,刚性结构1012可以具有适合于平行于第三方向z将单一挠曲件隔开并且与致动器的预期应用可兼容的任何形状。
[0170]-枢轴支承件-[0171]
还参考图10和图11a,示出了第一枢轴支承件1050。
[0172]
图10示出了第一枢轴支承件1050的第一板1051的投影图,并且图11a示出了第一枢轴支承件1050的侧视图。
[0173]
第一板1051包括平行于第一轴线x和第二轴线y延伸的矩形基板1052,锥形突起1053从该基板沿平行于第三轴线z的方向直立。锥形突起1053被示出为位于基板1052的中心,但实际上这并不是必须的,锥形突起1053放置在对于特定应用所需要的枢转原点的任何地方。第一枢轴支承件1050由接触锥形突起1053的第二板1054完成。偏置装置(未示出)将第一板1051和第二板1054推动到一起,以保持锥形突起1053和第二板1054之间的接触。第二板1054可以平行于第一轴线x和/或第二轴线y相对于锥形突起1053滑动,并且可以围绕任何轴线x、y、z旋转(倾斜),其中原点由锥形突起的尖端提供。
[0174]
以这种方式,第一板1051和第二板1054之间的相对运动对应于tx、ty、rx、ry和rz,而约束平行于第三轴线z的移动tz。
[0175]
锥形突起1053不是必需的,并且代替地可以使用适合提供枢轴点的任何形状的突起。
[0176]
还参考图11b,示出了第二枢轴支承件1055的侧视图。
[0177]
第二枢轴支承件1055包括第一板1051,但是用第三板1056代替第二板1054。第三板1056包括环形突起1057,环形突起1057限定接收锥形突起1053的尖端的凹部。环形突起1057约束第三板1056相对于第一板1051的侧向滑动。以这种方式,第一板1051和第三板1056之间的相对运动对应于rx、ry和rz,而约束移动tx、ty和tz。
[0178]
还参考图11c,示出了第三枢轴支承件1058的侧视图。
[0179]
第三枢轴支承件1058包括第一板1051,但是用第四板1059代替第二板1054。第四板1059包括锥形凹陷1060,其限定接收锥形突起1053的尖端的凹部。锥形凹陷1060约束第四板1059相对于第一板1051的侧向滑动。以这种方式,第一板1051和第四板1059之间的相对运动对应于rx、ry和rz dof,而约束移动tx、ty和tz。
[0180]
还参考图11d,示出了第四枢轴支承件1061的侧视图。
[0181]
第四枢轴支承件1061包括第一板1051,但是用第五板1062代替第二板1054。第五板1062包括接收锥形突起1053的尖端的通孔1063。通孔1063约束第五板1061相对于第一板1051的侧向滑动。以这种方式,第一板1051和第五板1062之间的相对运动对应于rx、ry和rz,而约束移动tx、ty和tz。与第三板1056或第四板1059相比,第五板1062的制造可能相对简单。
[0182]
枢轴支承件1050、1055、1058、1061可以被颠倒过来。因此,锥形(或其它形状的)突起1053可以悬垂在(上)板1054、1056、1059、1062上,并且如果存在,则相面对的突起1057、凹陷160或凹部1063可设置在(下)板1051、1052中。
[0183]-平面支承件-[0184]
还参考图12a和图12b,示出了第一平面支承件1064(也称为三点支承件)。
[0185]
图12a是侧视图,并且图12b是分解投影图。
[0186]
第一平面支承件1064包括与第二板1066接触地滑动的第一板1065。第一板1065支撑至少三个圆柱形突起1067,包括至少第一圆柱形突起10671、第二圆柱形突起10672和第三圆柱形突起10673,这些圆柱形突起不共线,例如布置在三角形的点处。第二板1066通过偏置装置(图12a和图12b中未示出)被推动成与圆柱形突起1067的平坦表面接触,并在平行于
第一轴线x和第二轴线y的平面中自由滑动,并绕平行于第三轴线z的轴线旋转。以这种方式,第一板1065和第二板1066之间的相对运动对应于tx、ty和/或rz。除非克服将板1065、1066推动到一起的偏置力,否则tz、rx和ry移动被约束。
[0187]
在图12a和图12b所示的示例中,两个板1065、1066都采取具有矩形外周界和限定中心孔1009的圆形内周界的环的形式。然而,板1065、1066的形状与第一平面支承件1064的功能无关,并且代替地可以使用任何形状的板。虽然在图12a和图12b中示出了三个圆柱形突起10671、10672、10673,但是可以使用任意数目的大于或等于三个的圆柱形突起。
[0188]
还参考图13,示出了第二平面支承件1068。
[0189]
第二平面支承件1068与第一平面支承件1064相同,除了圆柱形突起67被滚珠支承件10301、10302、10303代替。第一板1065也可以被替换为第三板1069,第三板1069包括凹部10701、10702、10703,例如圆形凹口,用于接收对应的滚珠支承件10301、10302、10303。除了第二平面支承件1068是滚动支承件而不是滑动支承件之外,第二平面支承件1068以与第一平面支承件1064相同的方式起作用。
[0190]-万向架-[0191]
还参考图14,示出了第一万向架支承件1071。
[0192]
第一万向架支承件1071包括外框架1072、内框架1073和中心部分1074。外框架1072和内框架1073通过第一扭转梁部分10751和第二扭转梁部分10752连接,第一扭转梁部分10751和第二扭转梁部分10752平行于第一轴线x间隔开定位并且位于内框架1073的相对侧上。第一扭转梁部分10751和第二扭转梁部分10752彼此共线并与中心部分1074的中心点共线。除了扭转梁部分10751、10752之外,内框架1073通过第一间隙10761与外框架1072分开。
[0193]
内框架1073和中心部分1074通过第三扭转梁部分10753和第四扭转梁部分10754连接,第三扭转梁部分10753和第四扭转梁部分10754平行于第二轴线y间隔开定位并且位于中心部分1074的相对侧上。第三扭转梁部分10753和第四扭转梁部分10754彼此共线并且与中心部分1074的中心点共线。除了扭转梁部分10753、10754之外,内框架1073通过第二间隙10762与中心部分分开。
[0194]
如果外框架1072被夹紧,则中心部分1074可以通过第一扭转梁部分10751和第二扭转梁部分10752的扭转绕第一轴线x旋转rx和/或通过第三扭转梁部分10753和第四扭转梁部分10754的扭转绕第二轴线y旋转ry。以这种方式,中心部分1074和外框架1072之间的相对运动对应于rx和ry,而其他移动tx、ty、tz和rz受到约束。
[0195]
扭转梁部分1075的宽度和贯穿厚度应该足够小,以响应于使用sma驱动装置11、20可施加的力而通过扭转实现足够的(即所设计的)旋转。
[0196]
还参考图15,示出了第二万向架支承件1077。
[0197]
第二万向架支承件1077包括连接到四个长形扭转梁部分10791、10792、10793、10794的中心部分1078。第一长形扭转梁部分10791和第二长形扭转梁部分10792平行于第一方向x间隔开并且位于中心部分1078的相对侧上。第一长形扭转梁部分10791和第二长形扭转梁部分10792彼此共线并且与中心部分1078的中心点共线。第三长形扭转梁部分10793和第四长形扭转梁部分10794平行于第二方向y间隔开并且位于中心部分1078的相对侧上。第三长形扭转梁部分10793和第四长形扭转梁部分10794彼此共线并且与中心部分1078的中心
点共线。
[0198]
如果扭转梁部分1079的自由端1080被夹紧,则中心部分1078可以通过第一扭转梁部分10791和第二扭转梁部分10792的扭转以及第三扭转梁部分10793和第四扭转梁部分10794的弯曲(例如,一个向上偏转,另一个向下偏转)而绕第一轴线x旋转rx。附加地或可选择地,中心部分1078可通过第三扭转梁部分10793和第四扭转梁部分10794的扭转以及第一扭转梁部分10791和第二扭转梁部分10792的弯曲而绕第二轴线y旋转ry。
[0199]-z形平移支承件-[0200]
还参考图16a和图16b,示出了z形平移支承件1081。
[0201]
图16a示出了分解投影图,并且图16b示出了通过组装的z形平移支承件1081的块1084截取的截面。
[0202]
z形平移支承件1081包括第一板1082和第二板1083。两个板1082、1083都采取具有矩形外周界和限定中心孔1009的圆形内周界的环的形式。块1084垂直于第一板1082的表面延伸。如图16a中所绘制的,第一板1082和第二板1083平行于第一轴线x和第二轴线y,且块1084在平行于第三轴线z的方向上延伸。块1084大致是立方体形的,块1084的第一面和第二面包括v形通道10861、10862,v形通道10861、10862与第三轴线z大体上平行地定向。
[0203]
一对滚珠支承件1030被接纳到每个v形通道10861、10862中,并且滚珠支承件1030通过从第二板1083延伸的相应的立方形突起10891、10892保持在v形通道10861、10862中。通常还包括用于加载支承件的偏置装置(未示出)和保持滚珠的装置(未示出)。
[0204]
以这种方式,第一板1082和第二板1083之间允许的相对运动对应于tz,而所有其他移动tx、ty、rx、ry、rz都受到约束。
[0205]
尽管在图16a和图16b中示出了单个块1084和对应的突起1087、10891、10892,但是在一些示例中,更多的块1084中的两个可以与对应组的对应的突起1087、10891、10892结合使用。
[0206]-螺旋挠曲支承件-[0207]
还参考图17,示出了螺旋挠曲支承件1090的示例。
[0208]
螺旋挠曲支承件1090包括圆形环1091,圆形环1091具有中心孔1009并且连接到三个、四个或更多个、优选五个或更多个螺旋梁部分1092。在图17所示的示例中,有四个螺旋梁部分10921、10922、10923、10924。在未连接到圆形环的端部处,每个螺旋梁部分10921、10922、10923、10924连接到垫状物10931、10932、10933、10934,例如用于连接到圆形环1091下面(相对于所绘制的第三轴线z)的层或结构。
[0209]
每个螺旋梁部分10921、10922、10923、10924与圆形环1091大致相切(在相同的方向上),且其跨度包括平行于包含第一轴线x和第二轴线y的平面的第一分量和平行于第三轴线z的第二分量。如果垫状物10931、10932、10933、10934被夹紧并且对圆形环1091施加向上(正z方向)的力,则作为响应,螺旋梁部分10921、10922、10923、10924会在该力的方向上偏转。然而,在这样做时,连接到圆形环的端部也偏转成更靠近相应的垫状物10931、10932、10933、10934,导致圆形环1091绕平行于第三轴线z的轴线顺时针旋转。相反,对圆形环1091施加向下(负z方向)的力将导致圆形环1091的向下移动和圆形环1091的逆时针(反时针)旋转。
[0210]
以这种方式,螺旋挠曲支承件1090起到将绕第三轴线z的旋转转换为平行于第三
轴线z的相对位移以及反之将平行于第三轴线z的相对位移转换为绕第三轴线z的旋转的作用。然而,这些移动不是相互独立的,并且相对于夹紧的垫状物10931、10932、10933、10934,圆形环1091被约束成沿近似螺旋的路径移动。由于这不反映独立的自由度,因此运动将表示为[tz,rz],以突出这种支承件类型的平行于第三轴线z的平移tz和绕第三轴线z的旋转rz之间的关系。
[0211]
尽管图17中所示的螺旋梁部分10921、10922、10923、10924是弯曲的,然而,在螺旋挠曲支承件1090的其他示例中,螺旋梁部分1091可以是直的。在wo2019/243849a1中描述了螺旋挠曲支承件1090的另外的示例,其内容通过引用以其整体并入本文。wo2019/243849a1的图19至图22和第22页第23行至第23页第24行的随附描述与螺旋挠曲支承件1090特别相关。下文还示出并描述了实施螺旋挠曲支承件1090的另外的示例。
[0212]-螺旋支承件-[0213]
还参考图18a和图18b,示出了螺旋支承件1094的示例。
[0214]
图18a是分解投影图,并且图18b是组装的螺旋支承件1094的投影。图18a中用虚线显示了被遮挡的特征。
[0215]
螺旋支承件1094包括第一结构1095和第二结构1096,第一结构1095和第二结构1096被配置成配合在一起以在第一结构1095的螺旋表面10971、10972和第二结构1096的螺旋表面10981、10982之间进行滑动运动。偏置装置(未示出)将第一结构1095和第二结构1096推动到一起以维持成对的螺旋表面10971和10981、10972、10982接触。以这种方式,第一结构1095和第二结构1096之间的相对运动被约束到螺旋路径[tz,rz]。
[0216]
图18a和图18b中所示的示例优先考虑了螺旋支承件功能的视觉清晰度而不是实施的可行性,并且下文描述的特定实施例包括更适合于结合到设备(诸如相机1)中的附加示例。特别地,尽管螺旋表面1097、1098可以弯曲以遵循如图18a和图18b所示的螺旋路径,但在其他示例中,螺旋表面1097、1098可以大体上是平面的,例如斜坡。尽管图18a和图18b所示的螺旋支承件1094是滑动支承件,但也可以采用滚动支承件形式的其他螺旋支承件。螺旋支承件1094的进一步示例可以在wo 2019/243849a1(已经通过引用并入)中找到。具体参见wo 2019/243849a1的图1至图18以及第7页第10行至第22页第21行的对应描述。
[0217]
尽管为了参考,以相对于一组右手笛卡尔轴线x、y、z的特定定向来示出和描述,但上文所述的任何支承件都可以以任意角度定向。
[0218]
上文所述的支承件可以由任何合适的材料和使用任何合适的制造方法形成。例如,板状或片状部件可以由金属片材(例如不锈钢)制造,并通过化学或激光蚀刻提供图案化。可以使用铣削或冲压,只要这不会不可接受地引入导致零件变形的残余应变。在图案化之后,这些零件可以根据需要弯曲或预变形。复杂的三维零件可以通过将零件附接到板、片材或其他零件来构建,例如使用粘合剂、焊接、铜焊、软焊等。可选择地,复杂的三维零件可以通过例如金属的烧结或压铸或者通过聚合物的注射模制来形成。任何支承表面都可以由聚合物(例如pom(缩醛)、ptfe或ptfe浸渍的pom)形成。
[0219]
第一致动器组件
[0220]
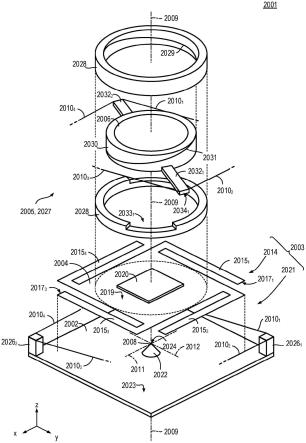
参考图19、图20、图21和图22,示意性地示出了第一致动器组件2001。
[0221]
致动器组件2001采用四sma线致动器的形式。致动器组件2001包括第一部分2002、第一支承装置2003、可倾斜平台2004、第二支承装置2005、第二部分2006和四sma线驱动系
统2007。
[0222]
第一支承装置2003将平台2004支撑在致动器组件2001的第一部分2002上。平台2004可围绕枢轴点2008倾斜,枢轴点2008位于穿过致动器组件2001的光轴2009(或“主轴线”)上。
[0223]
第二支承装置2005将致动器组件2001的第二部分2006支撑在平台2004上,使得第二部分2006与平台2004一起倾斜。
[0224]
驱动系统2007包括总共四根形状记忆合金线20101、20102、20103、20104(这里也称为“段”)。四根形状记忆合金线20101、20102、20103、20104将致动器组件的第二部分2006机械地连接(或“联接”)到致动器组件的第一部分2002。形状记忆合金线20101、20102、20103、20104由铜铝镍合金、镍钛合金或其他合适的形状记忆合金形成。
[0225]
形状记忆合金线20101、20102、20103、20104大体上是共面的,被称为“平四线sma线布置”。然而,形状记忆合金线20101、20102、20103、20104可以布置成不是共面的(在“有角度的四线sma线布置”中)。
[0226]-第一支承装置2003-[0227]
第一支承装置2003被配置为引导平台2004绕第一轴线2011和/或第二轴线2012的倾斜(即,绕第一轴线2011、绕第二轴线2012以及绕第一轴线2011和第二轴线2012的倾斜的组合),并约束平台2004绕主轴线2008的旋转。第一轴线2013和第二轴线2014彼此不平行,并且垂直于主轴线2009。在本示例中,第一轴线2011和第二轴线2012也彼此垂直。第一轴线2011和第二轴线2012穿过枢轴点2008。
[0228]
第一支承装置2003包括单一挠曲件2014,其大体上如上文参考图7a和图7b所述的。
[0229]
单一挠曲件2014包括两对梁部分(以下称为“挠曲件”)20151、20152、20153、20154。每个挠曲件20151、20152、20153、20154在一端(“第一端”)处刚性地连接到平台2004,并且具有与第一部分2002刚性连接的第二自由端20171、20172、20173、20174。
[0230]
平台2004和挠曲件20151、20152、20153、20154形成一个单件。例如,平台2004和挠曲件20151、20152、20153、20154可通过蚀刻或加工金属或金属合金(如不锈钢)的片材而形成。
[0231]
第一挠曲件20151和第三挠曲件20153平行于第一轴线x是长形的,并且能够通过在x-z平面中的梁弯曲而变形。同样,第二挠曲件20152和第四挠曲件20154平行于第二轴线y是长形的,并且能够通过在y-z平面中的梁弯曲而变形。挠曲件20151、20152、20153、20154的侧向(垂直于第三轴线z)偏转受到所有挠曲件20151、20152、20153、20154与平台2004的连接的约束。
[0232]
平台2004是大致薄且平坦的,且具有相对的第一面2018和第二面2019。第一面2018面对基座2002,且第二面2019背对基座2002。第二面2019(以下称为“上部面”)支撑图像传感器2020,例如ccd或cmos设备。
[0233]
第一支承装置2003包括与上文参考图10和图11a至图11d所描述的大体上相同的枢轴支承件2021。
[0234]
枢轴支承件2021包括从致动器组件的第一部分2002的上部面2023直立的构件2022(或“突起”),该突起2022用作枢轴的基座。在一些示例中,枢轴支承件2021可包括由致
[0250]
再次参考图19、图20、图21和图22,第一致动器组件2001能够通过使平台2004和第二部分2006一起围绕第一轴线2011和第二轴线2012倾斜来提拱ois且通过使第二部分2006沿着法线2501相对于平台2004移动来提拱af(图24)。
[0251]
不同的移动是由加热和冷却不同组合的sma线20101、20102、20103、20104引起的。正如前面所解释的,加热可以由驱动电流通过sma线引起,这导致sma线收缩。
[0252]
第二部分2006和平台2004之间的分离的改变是通过增加对相对侧上的两根线(例如第一线20101和第三线20103)的功率并因此使该两根线收缩同时降低对另外两根线(即第二线20102和第四线20104)的功率并因此允许该另外两根线扩展而引起的。存在围绕法线的扭矩变化,该扭矩由第一支承装置2003抵抗并由第二支承装置2005转换成螺旋移动。
[0253]
平台2004关于对角线(例如,关于线y=-x)的倾斜的变化是通过以下引起的:增加对两根相邻线(例如第四线20104和第一线20101)的功率并因此使该两根线收缩同时降低对另外两根线(在该例中为第二线20102和第三线20103)的功率并因此允许该另外两根线扩展,从而在第二部分2004上产生力,在这种情况下,沿着线y=x。
[0254]
合适的倾斜可以作为对角线倾斜变化的线性组合产生。
[0255]
第二部分2006的平移移动以及由此透镜装置(未示出)的平移移动可导致第二部分2006围绕法线2501的旋转移动(图24)。
[0256]
如果sma线布置与第一支承件竖直地间隔开且第一支承件和第二支承件抵抗x/y平面中的运动,则来自sma线布置的平移被第一支承件转换为倾斜。围绕第二轴线的旋转(即,ry)被添加到沿着第一轴线的运动(即tx),并且围绕第一轴线的旋转(即,rx)被添加到沿着第二轴线的运动(即,ty)。
[0257]
第一致动器组件的变型
[0258]
参考图23,示意性地示出了第一致动器组件2001(图22)的变型2001'。
[0259]
在变型2001'中,第一支承装置2003采取类似于图14所述的万向架2040的形式。
[0260]
万向架2040悬置在致动器组件的第一部分2002上方,其中外框架1072(图14)相对于第一部分2002固定,并且中心部分1074(图14)用作平台2004。
[0261]
万向架2040通过蚀刻或加工金属或金属合金(诸如不锈钢)的片材而形成。
[0262]
第二致动器组件
[0263]
参考图24、图25和图26,示意性地示出了第二致动器组件3001。
[0264]
致动器组件3001采取四sma线致动器的形式。致动器组件2001包括第一部分3002、第一支承装置3003、可倾斜平台3004、第二支承装置3005、第二部分3006、以及四sma线驱动系统3007。
[0265]
第一支承装置3003将平台3004支撑在致动器组件3001的第一部分3002上。平台3004可围绕枢轴点3008倾斜,枢轴点3008位于穿过致动器组件3001的光轴3009(或“主轴”)上。
[0266]
第二支承装置3005将致动器组件3001的第二部分3006支撑在平台3004上,使得第二部分3006与平台3004一起倾斜。
[0267]
驱动系统3007包括总共四根形状记忆合金线30101、30102、30103、30104(这里也称为“段”)。四根形状记忆合金线30101、30102、30103、30104将致动器组件的第二部分3006机械地连接(或“联接”)到致动器组件的第一部分3002。形状记忆合金线材30101、30102、
30103、30104由铜铝镍合金、镍钛合金或其他合适的形状记忆合金形成。
[0268]
第二致动器组件3001类似于第一致动器组件2001(图19),但主要在两个方面不同。
[0269]
第一,形状记忆线30101、30102、30103、30104与第一轴线3011和第二轴线3012大体上不共面,并且以称为“成角度的四线sma线布置”的布置倾斜。
[0270]
第二,在第二支承装置3005中使用了不同的支承装置。
[0271]-第一支承装置3003-[0272]
第一支承装置3003被配置为引导平台3004绕第一轴线3011和/或第二轴线3012的倾斜(即,绕第一轴线3011、绕第二轴线3012以及绕第一轴线3011和第二轴线3012的倾斜的组合),并约束平台3004绕主轴线3008的旋转。第一轴线3013和第二轴线3014彼此不平行,并且垂直于主轴线3009。在该示例中,第一轴线3011和第二轴线3012也彼此垂直。第一轴线3011和第二轴线3012穿过枢轴点3008。
[0273]
第一支承装置3003包括单一挠曲件3014,其大体上如上文参考图7a和图7b所描述的。
[0274]
单一挠曲件3014包括两对梁部分(以下称为“挠曲件”)30151、30152、30153、30154。每个挠曲件30151、30152、30153、30154在一端(“第一端”)处刚性地连接到平台3004,并且具有与第一部分3002刚性连接的第二自由端30171、30172、30173、30174。
[0275]
平台3004和挠曲件30151、30152、30153、30154形成一个单件。例如,平台3004和挠曲件30151、30152、30153、30154可通过蚀刻或加工金属或金属合金(如不锈钢)的片材而形成。
[0276]
第一挠曲件30151和第三挠曲件30153平行于第一轴线x是长形的,并且能够通过在x-z平面中的梁弯曲而变形。类似地,第二挠曲件30152和第四挠曲件30154平行于第二轴y是长形的,并且能够通过在y-z平面中的梁弯曲而变形。挠曲件30151、30152、30153、30154的侧向(垂直于第三轴线z)偏转受到所有挠曲件30151、30152、30153、30154与平台3004的连接的约束。
[0277]
平台3004是大致薄且平坦的,并且具有相对的第一面3018和第二面3019。第一面3018面对基座3002,且第二面3019背对基座3002。第二面3019(以下称为“上部面”)支撑图像传感器3020,例如ccd或cmos设备。
[0278]
第一支承装置3003包括枢轴支承件3021,枢轴支承件3021大体上与上文参考图10和图11a至图11d所描述的相同。
[0279]
枢轴支承件3021包括从致动器组件的第一部分3002的上部面3023直立的构件3022(或“突起”),该突起3022用作枢轴的基座。在一些示例中,枢轴支承件3021可以包括由致动器组件的第一部分3002支撑的单独的基座。
[0280]
突起3022具有远端3024,该远端3024接触平台3004,特别是接触平台3004的第一面3018(下文称为“底面”或“下侧”)上的接触点(或区域)。突起3022的远端3024和接触点限定枢轴点3008。
[0281]
挠曲件30151、30152、30153、30154的自由端30171、30172、30173、30174连接到组件3001的第一部分3002的上部面3023或枢轴支承件3021。这将组件的第一部分3002和平台3004推动到一起,以维持突起3022和平台3004之间的接触。
[0282]
用于形状记忆合金线材30101、30102、30103、30104的锚固构件30261、30262刚性地附接到第一部分3002。锚固构件30261、30262可以采取从致动器组件3001的第一部分3002直立的柱或其它结构的形式。在该示例中,设置了两个锚固构件30261、30262,其位于第一部分3002的相对的拐角处。但是,可以设置多于两个锚固构件30261、30262。压接部(未示出)用于将形状记忆合金线30101、30102、30103、30104附接到锚固构件30261、30262。
[0283]
致动器组件的第一部分3002由金属或金属合金(如不锈钢)形成。
[0284]-第二支承装置3005-[0285]
还参考图23和图24,平台3002位于可倾斜且具有法线3501(这里也称为“倾斜的轴线”或“倾斜轴线”)的第一平面3500中,使得使平台3002倾斜使法线3501远离主轴线倾斜。
[0286]
第二支承装置3005被配置为约束第二部分3006相对于平台3002的倾斜,以约束(即,抵抗或甚至防止或阻碍)第二部分3006在平行于第一平面的第二平面3502中的侧向移动,以及引导第二部分3006相对于平台3002沿法线3501的轴向移动。
[0287]
不同于第一致动器组件2001(图17),第二支承装置3005还约束第二部分3006围绕法线2501的旋转。
[0288]
第二支承装置3005包括类似于上文关于图16a描述的z形平移支承件3081。
[0289]
块3084垂直于平台3004的上表面3019延伸。块3084大致是立方形的,除了具有大体上平行于第三轴线的轴线的圆孔3085和块3084的第一面和第二面包括与第三轴线z大体上平行地定向的v形通道30861、30862之外。
[0290]
一对滚珠支承件3030被接纳到每个v形通道30861、30862中,且滚珠支承件3030通过从第二板8083延伸的相应的立方形突起30891、30892保持在v形通道30861、30862中。
[0291]
尽管示出了单个块3084和对应的突起3087、30891、30892,但是在一些示例中,更多块3084中的两个可以与对应组的对应的突起3087、30891、30892结合使用。
[0292]
第二部分3006包括孔3090。第一块31001、第二块31002、第三块31003和第四块31004向外伸出且从第二部分3006的两个相对的拐角31011、31012伸出且向上或向下伸出。第二部分3006可以由金属或金属合金(如不锈钢)形成。
[0293]
第一形状记忆合金线30101连接在第一块31001的远端和第一锚固点30261之间且第二形状记忆合金线30102连接在第一锚固点30261和第二块31002的远端之间。第三形状记忆合金线30103连接在第三块31003的远端和第二锚固点30262之间且第四形状记忆合金线30104连接在第二锚固点3026s以及第四块31004的远端之间。
[0294]
特别参考图27,透镜装置3200由第二部分3006支撑。
[0295]-移动-[0296]
再次参考图26、图27和图28,第一致动器组件3001能够通过使平台3004和第二部分3006围绕第一轴线3011和第二轴线3012一起倾斜来提拱ois且通过使第二部分3006沿着法线3501相对于平台3004移动来提拱af(图24)。
[0297]
不同的移动是由加热和冷却不同组合的sma线30101、30102、30103、30104引起的。正如前面所解释的,可以通过驱动电流通过sma线来加热sma,这导致sma线收缩。
[0298]
第二部分3006和平台3004之间的分离的改变是通过增加对相对侧上的两根线(例如第一线30101和第三线30103)的功率并因此使该两根线收缩同时降低对另外两根线(即第二线30102和第四线30104)的功率并因此允许该另外两根线扩展而引起的。这导致线30101、
30102、30103、30104在第二部分3006上产生螺旋力。第一支承装置3003抵抗绕z的旋转,第二支承装置3005将螺旋力转换为第二部分的竖直运动。
[0299]
平台3004关于对角线(例如,关于线y=-x)的倾斜的变化是通过以下引起的:增加对两根相邻线(例如第四线30104和第一线30101)的功率并因此使该两根线收缩同时降低对另外两根线(在该例中为第二线30102和第三线30103)的功率并因此允许该另外两根线扩展,从而在第二部分3004上产生力,在这种情况下,沿着线y=x。
[0300]
合适的倾斜可以作为对角线倾斜变化的线性组合产生。
[0301]
第二部分3006的平移移动以及由此透镜装置(未示出)的平移移动可导致第二部分3006围绕法线3501的旋转移动(图24)。
[0302]
如果sma线布置与第一支承件竖直地间隔开且第一支承件和第二支承件抵抗x/y平面中的运动,则来自sma线布置的平移被第一支承件转换为倾斜。围绕第二轴线的旋转(即,ry)被添加到沿着第一轴线的运动(即tx),并且围绕第一轴线的旋转(即,rx)被添加到沿着第二轴线的运动(即,ty)。
[0303]
传感器和透镜托架的位置互换
[0304]
在上述示例中,传感器2020(图21)、3020(图27)安装在平台2004(图21)、3004(图27)上,且透镜装置2030(图21)、3200(图27)安装在第二部分2006(图21)、3006(图27)上。换种表达,传感器2020(图21)、3020(图27)倾斜,透镜装置2030(图21)、3200(图27)也随之倾斜,并且透镜装置2030(图21)、3200(图27)的位置相对于传感器2020(图21)、3020(图27)变化。
[0305]
参照图29,使用第一致动器组件的另一变型2001'作为示例,传感器2020和透镜装置2030的位置可以互换,使得透镜装置2030安装在平台2004'上,并且传感器2020安装在第二部分2006上。同样,换种表达,透镜装置2030倾斜,传感器2020也随之倾斜,并且传感器2020的位置相对于传感器透镜装置2030变化。
[0306]
在该布置中,第一部分2002设置有孔2041,光可以穿过孔2041,并且使用适当的第一支承件2003,例如万向架形式的第一支承件2003,该第一支承件2003可以保持透镜装置2030,并且可以允许光朝向传感器2020穿过透镜装置2030。万向架2003可支撑在一组块20251、20252、20253、20254上并固定到该组块,该组块从组件的第一部分2002'直立。
[0307]
可以以类似的方式修改上文描述的第二致动器组件3001(图26)。
[0308]
修改
[0309]
应理解,可以存在上述实施例的许多其他变型。
[0310]
例如,上述不同的sma驱动组件和不同的支承件可适当地用于上面所描述的致动器组件中。
[0311]
在前面的描述中,部分被描述为矩形,这应该被解释为包含正方形形状。在前面的描述中,部分被描述为圆形,这应该被解释为包含椭圆形状。
[0312]
第一sma线至第四sma线已经被描述并显示为直接连接第一部分和第二部分。然而,在一些示例中,第一sma线至第四sma线可以例如经由一个或多个中间结构(未示出)间接连接第一部分和第二部分。中间结构(未示出)可以被配置为帮助延长一根或更多根sma线的行程。
[0313]
这里,术语矩形应理解为包括正方形。
[0314]
该致动器组件可以是任何类型的组件,其包括第一部分和相对于第一部分可移动的第二部分。致动器组件可以是或可以设置在以下任何一种设备中:智能手机、用于智能手机的保护盖或壳、用于智能手机或电子设备的功能盖或壳、相机、可折叠智能手机、可折叠智能手机相机、可折叠消费电子设备、具有折叠光学器件的相机、图像捕获设备、阵列相机、三维感测设备或系统、伺服电机、消费电子设备、移动或便携式计算设备、移动或便携式电子设备、膝上型电脑、平板计算设备、电子阅读器、计算附件或计算外围设备、音频设备、安全系统、游戏系统、游戏附件、机器人或机器人设备、医疗设备、增强现实系统、增强现实设备、虚拟现实系统、虚拟现实设备、可穿戴设备、无人机、飞行器、航天器、潜水船、交通工具和自动驾驶交通工具、工具、外科手术工具、遥控器、衣服、开关、刻度盘或按钮、显示屏、触摸屏、柔性表面和无线通信设备。应当理解,这是示例性设备的非穷举列表。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。