1.本实用新型属于医疗穿刺技术领域,尤其涉及一种单臂穿刺机器人。
背景技术:
2.穿刺是指将穿刺针刺入目标腔内抽取分泌物做化验、向目标腔内注入气体或照影剂做照影检查、或向目标腔内注入药物的一种诊疗技术。这项诊疗技术在前列腺癌治疗上应用广泛,前列腺癌是指发生在前列腺的上皮性恶性肿瘤,是男性泌尿生殖系常见的恶性肿瘤,且发病率随着年龄的增长而增长,确诊前列腺癌需要通过前列腺穿刺活检进行病理检查。
3.前列腺穿刺活检手术主要是6点系统穿刺活检和更高检出率的12点系统穿刺活检,系统性穿刺活检是针对整个前列腺进行的,其最大的问题是穿刺的针数多,对患者的创伤大,容易造成感染。因此现在临床上普遍采用穿刺和超声探头一体化的设备,取样过程通过超声图像的引导下依靠医生的感觉进行病灶区域的穿刺取样,这种根据医生技能和经验的穿刺过程,极易发生穿刺不准确现象。
4.公告号为cn106901836b的中国专利申请公开了一种前列腺医疗穿刺机器人,包括多个维度的运动机构,能够灵活调整穿刺针的位置和方向。但是,该方案的穿刺针角度调节机构结构复杂,容易造成穿刺针的行进偏差,使得穿刺针控制精度差。
技术实现要素:
5.针对背景技术中的问题,本实用新型的目的是提供一种单臂穿刺机器人,包括超声检测单元和穿刺单元,所述穿刺单元设于所述超声检测单元上;
6.所述穿刺单元包括:
7.穿刺深度直线驱动机构,其固定端连接于所述超声检测单元;
8.穿刺角度旋转驱动机构,其固定端连接于所述穿刺深度直线驱动机构的驱动端;
9.穿刺升降机构,其固定端连接于所述穿刺角度旋转驱动机构的驱动端;
10.穿刺针架,设于所述穿刺升降机构的驱动端。
11.较佳的,所述穿刺深度直线驱动机构为第一直线滑台,所述第一直线滑台连接于所述超声检测单元。
12.较佳的,所述穿刺角度旋转驱动机构包括第一旋转电机和第一安装架,所述第一安装架安装于所述第一直线滑台的滑块上,所述第一旋转电机安装于所述第一安装架。
13.较佳的,所述穿刺升降机构为第二直线滑台,所述第二直线滑台的一端连接于所述第一旋转电机的输出轴;所述穿刺针架安装于所述第二直线滑台的滑块上。
14.较佳的,所述穿刺针架通过连接杆连接所述第二直线滑台的滑块。
15.较佳的,所述第一直线滑台通过连接臂连接于所述超声检测单元。
16.较佳的,所述超声检测单元包括:
17.底座;
18.超声直线驱动机构,其固定端设于所述底座;
19.第二安装架,安装于所述超声直线驱动机构的驱动端,且所述穿刺单元连接于所述第二安装架;
20.超声旋转驱动机构,设于所述第二安装架;
21.超声探头,穿设且转动连接于所述第二安装架且与所述超声旋转驱动机构连接,所述超声旋转驱动机构驱动所述超声探头旋转;
22.支架,设于所述底座;
23.超声鞘,设于所述支架,所述超声探头的一端伸入所述超声鞘。
24.较佳的,所述超声直线驱动机构为第三直线滑台,所述第二安装架安装于所述第三直线滑台的滑块上。
25.较佳的,所述超声旋转驱动机构包括第二旋转电机、主动齿轮和从动齿轮,所述第二旋转电机安装于所述第二安装架,所述主动齿轮设于所述第二旋转电机的输出轴上,所述从动齿轮设于所述超声探头的圆周外壁上,且所述主动齿轮和所述从动齿轮相互啮合。
26.较佳的,穿刺针穿设于所述穿刺针架,所述穿刺针架用于引导所述穿刺针的穿刺路径。
27.本实用新型由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
28.本实用新型通过穿刺深度直线驱动机构可控制穿刺针的穿刺深度、通过穿刺角度旋转驱动机构可实现穿刺针俯仰穿刺角度的调节、通过穿刺升降机构可实现穿刺针垂直方向的位置调节。通过穿刺角度旋转驱动机构驱动穿刺升降机构以带动穿刺针的旋转,使得俯仰角度驱动结构更加简单,使得穿刺针的控制精度更高。
附图说明
29.下面结合附图对本实用新型的具体实施方式作进一步详细说明,其中:
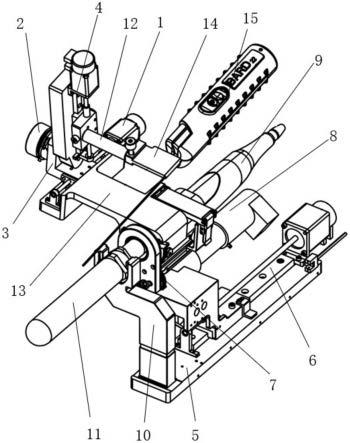
30.图1为本实用新型轴侧图;
31.图2为本实用新型正视图;
32.图3为本实用新型侧视图;
33.图4为本实用新型俯视图。
34.附图标记说明:
35.1:第一直线滑台;2:第一旋转电机;3:第一安装架;4:第二直线滑台;5:底座;6:第三直线滑台;7:第二安装架;8:第二旋转电机;9:超声探头;10:支架;11:超声鞘;12:连接杆;13:连接臂;14:穿刺针架;15:穿刺针。
具体实施方式
36.以下结合附图和具体实施例对本实用新型作进一步详细说明。根据下面说明,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比率,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
37.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如
果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
38.参看图1至4,本实用新型的核心是提供一种单臂穿刺机器人,包括超声检测单元和穿刺单元,穿刺单元设于超声检测单元上。
39.穿刺单元包括穿刺深度直线驱动机构、穿刺角度旋转驱动机构、穿刺升降机构、穿刺针架14。
40.穿刺深度直线驱动机构的固定端连接于超声检测单元,具体的穿刺深度直线驱动机构为第一直线滑台1,第一直线滑台1连接于超声检测单元。
41.穿刺角度旋转驱动机构的固定端连接于穿刺深度直线驱动机构的驱动端,也就是说穿刺角度旋转驱动机构的固定端连接于第一直线滑台1的滑块上。具体的,穿刺角度旋转驱动机构包括第一旋转电机2和第一安装架3,第一安装架3安装于第一直线滑台1的滑块上,第一旋转电机2安装于第一安装架3。
42.穿刺升降机构的固定端连接于穿刺角度旋转驱动机构的驱动端,也就是说穿刺升降机构的固定端连接于第一旋转电机2的输出轴。具体的,穿刺升降机构为第二直线滑台4,第二直线滑台4的一端连接于第一旋转电机2的输出轴。
43.穿刺针架14安装于第二直线滑台4的滑块上,具体通过连接杆12连接第二直线滑台4的滑块。穿刺针15穿设于穿刺针架14,穿刺针架14用于引导穿刺针15的穿刺路径,穿刺针15是通过医生进行手持的,穿刺单元做好位置调整后,医生手持穿刺针穿过穿刺针架而实现穿刺路径的引导。
44.第一直线滑台1带动第一安装架3、第一旋转电机2和第二直线滑台4朝向或远离待穿刺部位直线移动,以带动连接杆12、穿刺针架14和穿刺针15朝向或远离待穿刺部位直线前后移动,以实现控制穿刺针15穿刺深度的目的。
45.第一旋转电机2带动第二直线滑台4、连接杆12、穿刺针架14和穿刺针15旋转,以实现穿刺针15俯仰穿刺角度的调节,实现穿刺针15的角度路径控制。
46.第二直线滑台4带动连接杆12、穿刺针架14和穿刺针15上下移动,以实现穿刺针15垂直方向的位置调节。
47.通过第一旋转电机2驱动第二直线滑台4以带动穿刺针15的旋转,使得俯仰角度驱动结构更加简单,穿刺针架14仅通过一个连接杆12与第二直线滑台4的滑块连接,实现单臂连接,第一旋转电机2输出轴的旋转运动可直接输出至穿刺针15,使得对穿刺针15的控制精度更高。
48.超声检测单元包括底座5、超声直线驱动机构、第二安装架7、超声旋转驱动机构、超声探头9、支架10和超声鞘11。
49.超声直线驱动机构的固定端设于底座5。具体的,超声直线驱动机构为第三直线滑台6。
50.第二安装架7安装于超声直线驱动机构的驱动端,也就是说第二安装架7安装于第三直线滑台6的滑块上。第一直线滑台1通过连接臂13连接于第二安装架7。
51.超声旋转驱动机构设于第二安装架7,超声探头9穿设且转动连接于第二安装架7且与超声旋转驱动机构连接,超声旋转驱动机构驱动超声探头9旋转。具体的,超声旋转驱动机构包括第二旋转电机8、主动齿轮和从动齿轮,第二旋转电机8安装于第二安装架7,主动齿轮设于第二旋转电机8的输出轴上,从动齿轮设于超声探头9的圆周外壁上,且主动齿
轮和从动齿轮相互啮合。
52.支架10设于底座5,超声鞘11设于支架10,超声探头9的一端伸入超声鞘11。超声鞘11用来包含超声探头9和撑开直肠,超声鞘11内涂耦合剂,超声探头9可以在超声鞘11内进行直线运动和旋转运动。
53.通过第三直线滑台6驱动超声探头9直线移动、通过第二旋转电机8驱动超声探头9旋转以实现超声探头9对各个位置的超声检测,以实现直线方向和旋转方向的超声图形扫描。
54.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于上述实施方式。即使对本实用新型作出各种变化,倘若这些变化属于本实用新型权利要求及其等同技术的范围之内,则仍落入在本实用新型的保护范围之中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。