1.本发明涉及非圆齿轮技术领域,具体涉及一种传动比为分段连续函数的异形齿轮副。
背景技术:
2.异形齿轮也称非圆齿轮,是一种可以提供可变传动比的齿轮机构,常被应用于一些需要变速的特殊传动的场合。由于异形齿轮靠齿轮主从轮的啮合滚动传递运动,具有传递力矩大、精度高、结构可靠、使用寿命长等诸多优点,同时也能提供平稳的变速传动,在工业设备中得到广泛的应用。与普通圆柱齿轮的节曲线不同,异形齿轮的节曲线形状取决于具体的应用场景,没有统一的标准。
3.现有的异形齿轮,都是用在需要连续变速的场合,其传动比总是瞬时变化的。体现在具体结构上,就是异形齿轮的节曲线曲率半径是连续变化的,常见的有椭圆形节曲线和卵形节曲线。目前,还没有一种异形齿轮即能提供稳定的传动比,又能提供可变的传动比。究其原因,在于这种异形齿轮没有特定的应用场景,现有的连续变速的异形齿轮已能够满足使用需求。事实上,这种异形齿轮具有很高的应用价值,其应用方向之一就是可以与差动轮系组成间歇运动机构。
4.差动轮系具有两个运动自由度,其运动是不确定的。实际应用中,差动轮系常与定轴轮系混联,组成封闭式差动轮系,从而使其自由度唯一。常见的连接方式是用定轴轮系连接差动轮系中的外啮合中心轮和内啮合中心轮,使行星架输出确定的转速。很显然,对于确定的差动轮系,与其混联的定轴轮系必然存在唯一的传动比,可以使得当外啮合中心轮、内啮合中心轮和行星轮转速不为0时,行星架的转速始终为0。基于此原理,如果与封闭式差动轮系中的定轴轮系即能提供一个稳定的传动比,该稳定的传动比值刚好可以使得行星架的转速为0,同时传动比又能平稳地增大和减小,那么该封闭式差动轮系中的行星架将输出间歇运动。由于依靠齿轮传动,因此这种间歇运动机构具有传动精度高、效率高、变速平稳等诸多优点,可取代现有的凸轮式间歇运动机构,用于高速重载条件下的变速传动场合。
5.定轴轮系要提供这样的传动比,至少需要一对异形齿轮,且该异形齿轮的节曲线即要包含圆弧曲线,又要包含非圆弧曲线,同时齿轮的回转中心必须位于圆弧节曲线的圆心。这种即有圆弧,又有非圆弧的异形齿轮节曲线,其设计难点在于既要同时保证圆弧与非圆弧节曲线的连续相切条件,使变化比变化平稳,又要保证两个异形齿轮节曲线周长之比为整数,同时还要满足节曲线封闭条件,相比于一般非圆齿轮的节曲线有其特殊性。
技术实现要素:
6.基于上述原因,本发明提供一种传动比为分段连续函数的异形齿轮副,包括第一异形齿轮,所述第一异形齿轮的节曲线上至少包含一段圆弧节曲线和一段非圆弧节曲线。所述圆弧节曲线的为曲率半径恒定不变,非圆弧节曲线的曲率连续变化,圆弧节曲线的两端与非圆弧节曲线相切连接,非圆弧节曲线的两端与圆弧节曲线相切连接,圆弧节曲线与
非圆弧节曲线交替相连后构成一条封闭的曲线。第一异形齿轮的回转中心位于其所有圆弧节曲线的圆心,所述第一异形齿轮的回转中心包括其装配孔或铰接轴的轴心。
7.本发明提供一种传动比为分段连续函数的异形齿轮副还包括第二异形齿轮,第二异形齿轮也至少包含一段圆弧节曲线和一段非圆弧节曲线,圆弧节曲线的两端与非圆弧节曲线相切连接,非圆弧节曲线的两端与圆弧节曲线的节曲线相切连接,圆弧节曲线与非圆弧节曲线相连后构成一条封闭的曲线。第二异形齿轮节曲线周长是第一异形齿轮节曲线周长的整数倍。所述第一异形齿轮的圆弧节曲线与第二异形齿轮的圆弧节曲线啮合,啮合后的其传动比为定值;第一异形齿轮的非圆弧节曲线与第二异形齿轮的非圆弧节曲线啮合,啮合后其传动比连续变化。第一异形齿轮与第二异形齿轮啮合中心距l为常数,第二异形齿轮的回转中心位于第二异形齿轮的所有圆弧节曲线的圆心。
8.一般性地,第一异形齿轮包含n段圆弧节曲线和n段非圆弧节曲线,第二异形齿轮包含n*k段同心的圆弧节曲线和n*k段非圆弧节曲线,第二异形齿轮的节曲线周长是第一异形齿轮节曲线周长的k倍,其中n和k为大于0的整数。第一异形齿轮上任意一段圆弧节曲线和任意一段非圆弧节曲线,都能在第二异形齿轮上找到k段弧长相同的圆弧节曲线和非圆弧节曲线。第一异形齿轮与第二异形齿轮啮合后的传动比为分段连续函数,所述传动比函数包含常数和由余弦函数构造的初等函数。n和k具有无数种取值组合,优选的三组值分别是:n=k=1,或n=k=2,或n=1而k=2。
9.当n=k=1时,第一异形齿轮和第二异形齿轮皆为外啮合齿轮,各包含一段圆弧节曲线和一段非圆弧节曲线,此时第一异形齿轮与第二异形齿轮的传动比函数为:
[0010][0011]
第一异形齿轮节曲线的参数方程为:
[0012][0013]
第二异形齿轮的节曲线方程及其转角函数为:
[0014][0015][0016]
式中,is为第一异形齿轮和第二异形齿轮圆弧节曲线啮合后的传动比,i
l
为第一异
形齿轮和第二异形齿轮非圆弧节曲线啮合后的传动比在非端点处取得的极限值。α为第一异形齿轮非圆弧节曲线对应的转角弧度,第一异形齿轮节曲线封闭,因此其圆弧节曲线的转角弧度为2π-α。
[0017]
第二异形齿轮非圆弧节曲线对应的转角弧度为其圆弧节曲线对应的转角弧度为第二异形齿轮节曲线封闭,因此有当is等于1时,i
l
也必然等于1,此时第一异形齿轮和第二异形齿轮节曲线都将变为整圆,不能实现本发明目的,因此is≠i
l
≠1。
[0018]
当n=k=2时,第一异形齿轮和第二异形齿轮皆为外啮合齿轮,各包含两段圆弧节曲线和两段非圆弧节曲线,此时第一异形齿轮与第二异形齿轮的传动比函数为:
[0019][0020]
第一异形齿轮的节曲线方程为:
[0021][0022]
第二异形齿轮对应的节曲线方程及转角函数为
[0023]
[0024][0025]
式中:i
s1
,i
s2
分别为第一异形齿轮中的两段圆弧节曲线与第二异形齿轮两段圆弧节曲线啮合所得的传动比,l为中心距;α1,α2,α3,α4分别是第一异形齿轮上第11段非圆弧节曲线、第12段圆弧节曲线、第13段非圆弧节曲线和第14段圆弧节曲线对应的转角弧度。第一异形齿轮节曲线封闭,有α1 α2 α3 α4=2π。
[0026]
第二异形齿轮上第21段非圆弧节曲线、第22段圆弧节曲线、第23段非圆弧节曲线和第24段圆弧节曲线对应的转角弧度分别记为β1,β2,β3,β4,有:
[0027][0028]
第二异形齿轮节曲线封闭,因而有
[0029]
同样的,i
s1
≠i
s2
≠1。
[0030]
优选的,使α1=α3,此时β1=β3成立,于是有:
[0031][0032]
更进一步的,优选使i
s1
·is2
=1,此时第一异形非圆弧节曲线的转角弧度总是第于与其啮合的第二异形齿轮非圆弧节曲线的转角弧度,有α1=β1=α3=β3,于是有:
[0033][0034]
一种特殊的情形是α4=0,此时相当于取消第14段圆弧节曲线,第11段和第13段非圆弧节曲线直接相切连接,变成一段非圆弧节曲线。与n=k=1时第一种情况不同之处在于,这种情况下第11段和第13段非圆弧节曲线都是由半个周期的余弦函数构造,对应的转角范围不同,因此是不对称的。而n=k=1情况下的非圆弧节曲线是由一个周期的余弦函数构造,因此总是对称的。
[0035]
更特殊的,同时使α4=0和α1=α3,此时将转化为n=k=1时所得的结果。
[0036]
当n=1而k=2时,第一异形齿轮仍为外啮合齿轮,第二异形齿轮既可以是外啮合齿轮,也可以是内啮合齿轮。第一异形齿轮包含一段圆弧节曲线和一段非圆弧节曲线,第二异形齿轮包含两段形状相同的圆弧节曲线和两段形状相同的非圆弧节曲线,此时第一异形齿轮与第二异形齿轮的传动比函数仍可以表示为:
[0037]
[0038]
第一异形齿轮节曲线方程为
[0039][0040]
第二异形齿轮的节曲线方程及其转角函数为
[0041][0042][0043]
式中,α为第一异形齿轮非圆弧节曲线对应的转角弧度,is为第一异形齿轮和第二异形齿轮圆弧节曲线啮合后的传动比,i
l
为第一异形齿轮和第二异形齿轮非圆弧节曲线啮合后的传动比在非端点处取得的极值。当第二异形齿轮为外啮合齿轮时,
±
号为正,而为负;第二异形齿轮为内啮合齿轮时,
±
号为负,而为正。
[0044]
第二异形齿轮第21段非圆弧节曲线、第22段圆弧节曲线、第23段非圆弧节曲线、第24段圆弧节曲线对应的转角弧度分别记为:β1,β2,β3,β4,有:
[0045][0046]
所述等式中等号两端的数值之间允许存在偏差,所述等号两端数值之差不超过其中任意一项的1/100。所述传动比为啮合异形齿轮工作时的转速比,无论是外啮合还是内啮合,皆取正数值进行计算。
[0047]
上述所有节曲线分段函数方程,不仅连续,而且其在各段端点处对转角自变量θ1的导数值皆为0,因而可以保证圆弧节曲线与非圆弧节曲线之间相切连接。
[0048]
第一和第二异形齿轮本质上仍是非圆齿轮,根据现有的技术,在节曲线确定的情况下,可以确定出异形齿轮的轮齿参数,包括齿数、齿距、压力角及齿廓。
[0049]
本发明的有益效果
[0050]
本发明提供的一种传动比为分段连续函数的异形齿轮副,在传动过程中其传动比即能瞬时变化,也能在一段时间内保持稳定,具有圆柱齿轮和一般非圆齿轮所不具备的传动特性。该异形齿轮传动比函数形式简单,且是可积的,理论上可以得到满足传动要求的精确的节曲线,并且可以保证节曲线外凸性及其曲率连续性,无需进行修形。该异形齿轮副可用于封闭式差动轮系中,组成间歇运动机构,这种间歇运动机构依靠齿轮传动,因而可以平稳地变速,传动精度高,能够满足高速重载下的变速传动要求。
附图说明
[0051]
图1为实施例1异形齿轮副的节曲线示意图
[0052]
图2为实施例2第一组取值下异形齿轮副的节曲线示意图
[0053]
图3为实施例2第二组取值下异形齿轮副的节曲线示意图
[0054]
图4为实施例2第三组取值下异形齿轮副的节曲线示意图
[0055]
图5为实施例2第四组取值下异形齿轮副的节曲线示意图
[0056]
图6为实施例2第五组取值下异形齿轮副的节曲线示意图
[0057]
图7为实施例3外啮合时异形齿轮副的节曲线示意图
[0058]
图8为实施例3内啮合时异形齿轮副的节曲线示意图
[0059]
图1至图7中:左侧实线为第一异形齿轮节曲线,右侧实线为第二异形齿轮节曲线
[0060]
图8中:内部实线为第一异形齿轮节曲线,外部实线为第二异形齿轮节曲线
具体实施方式
[0061]
实施例1
[0062]
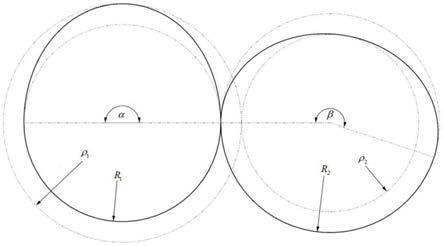
参考图1,本实施例提供一种传动比为分段连续函数的异形齿轮副,包括第一异形齿轮和第二异形齿轮,第一异形齿轮和第二异形齿轮皆为外啮合齿轮,且都包含一段圆弧节曲线和一段非圆弧节曲线。第一异形齿轮的圆弧节曲线与非圆弧节曲线首尾相切连接,构成一条封闭的节曲线;第二异形齿轮的圆弧节曲线与非圆弧节曲线首尾相切连接,构成一条封闭的节曲线。第一异形齿轮与第二异形齿轮节曲线周长相等。第一异形齿轮和第二异形齿轮的回转中心位于各自圆弧节曲线的圆心。
[0063]
第一异形齿轮节曲线参数记为:非圆弧节曲线转角弧度为α,非圆弧节曲线上的点与圆弧节曲线中心的极限距离为ρ1;圆弧节曲线转角弧度为2π-α,节曲线半径为r1。
[0064]
第二异形齿轮节曲线参数记为:非圆弧节曲线转角弧度为β,非圆弧节曲线上的点与圆弧节曲线中心的极限距离为ρ2;圆弧节曲线转角弧度为2π-β,节曲线半径为r2。
[0065]
第一异形齿轮圆弧节曲线与第二异形齿轮圆弧节曲线啮合后的稳定传动比为is。第一异形齿轮非圆弧节曲线与第二异形齿轮非圆弧节曲线啮合后的中点位置的极限传动比为i
l
。第一异形齿轮与第二异形齿轮的中心距为l。
[0066]
第一异形齿轮与第二异形齿轮的传动比函数为:
[0067][0068]
则第一异形齿轮与第二异形齿轮节曲线参数之间满足如下关系:
[0069]
l=r1 r2=ρ1 ρ2;is≠i
l
≠1;
[0070]
(2π-α)
·
r1=(2π-β)
·
r2;
[0071][0072]
满足上述关系式的r1,r2,ρ1,ρ2,α,β,is,i
l
,l的取值组合理论上有无数种,可选的一组为:
[0073]
其节曲线形状如图1实线所示。
[0074]
实施例2
[0075]
参考图2,本实施例提供一种传动比为分段连续函数的异形齿轮副,包括第一异形齿轮和第二异形齿轮,第一异形齿轮和第二异形齿轮皆为外啮合齿轮,且都包含两段同心的圆弧节曲线和两段非圆弧节曲线。第一异形齿轮的圆弧节曲线与非圆弧节曲线首尾相切连接,构成一条封闭的节曲线;第二异形齿轮的圆弧节曲线与非圆弧节曲线首尾相切连接,构成一条封闭的节曲线。第一异形齿轮与第二异形齿轮节曲线周长相等。第一异形齿轮和第二异形齿轮的其回转中心为各自圆弧节曲线的圆心。
[0076]
第一异形齿轮节曲线参数记为:
[0077]
第11段非圆弧节曲线转角弧度为α
11
;
[0078]
第12段圆弧节曲线转角弧度为α
12
,半径为r
12
;
[0079]
第13段非圆弧节曲线转角弧度为α
13
;
[0080]
第14段圆弧节曲线转角弧度为α
14
,半径为r
14
。
[0081]
第二异形齿轮节曲线参数记为:
[0082]
第21段非圆弧节曲线转角弧度为β
21
;
[0083]
第22段圆弧节曲线转角弧度为β
22
,半径为r
22
;
[0084]
第23段非圆弧节曲线转角弧度为β
23
;
[0085]
第24段圆弧节曲线转角弧度为β
24
,半径为r
24
。
[0086]
第12段圆弧节曲线与第22段圆弧节曲线啮合后的稳定传动比为i
s1
。
[0087]
第14段圆弧节曲线与第24段圆弧节曲线啮合后的稳定传动比为i
s2
。
[0088]
第一异形齿轮与第二异形齿轮中心距为l。
[0089]
第一异形齿轮与第二异形齿轮啮合后的的传动比函数为:
[0090][0091]
第一异形齿轮与第二异形齿轮节曲线参数之间满足如下关系:
[0092]
l=r
12
r
22
=r
14
r
24
;i
s1
≠i
s2
≠1;
[0093]
α
11
α
12
α
13
α
14
=2π;β
21
β
22
β
23
β
24
=2π;
[0094][0095][0096]
满足上述关系的取值组合有无数种,具有一般性的第一组取值为:
[0097]
其节曲线形状如图2实线所示。
[0098]
优选的,使α
11
=α
13
,则可选的第二组取值为:
[0099]
其节曲线如图3实线所示。
[0100]
第三组取值组合:
[0101]
其节曲线如图4实线所示。
[0102]
由于非圆弧节曲线转角范围小,故所得节曲线有内凹。节曲线的凹凸性除了跟非圆弧节曲线的转角范围有关之外,还与异形齿轮上两个圆弧节曲线的半径之差的大小有关。因此要想得到完全外凸的节曲线,只需增大非圆弧节曲线的转角弧度,或减少传动比的变化范围即可。
[0103]
特殊性,令α
12
=β
12
=0或α
14
=β
24
=0,此时第11段、第13段非圆弧节曲线相切连接
在一起,构成一段非圆弧节曲线,i
s2
变为非圆弧节曲线啮合后的极限传动比,可选的第四组取值为:
[0104]
其节曲线如图5实线所示。
[0105]
更特殊的,在α
12
=β
12
=0或α
14
=β
24
=0的情况下,同时令α
11
=α
13
,可选的第五组取值为:
[0106]
其节曲线如图6实线所示。
[0107]
该组取值也可以由实施例1的方法获取,因此实施例1实际上是实施例2的一种特殊情形。
[0108]
实施例3
[0109]
参考图7和图8,本实施例提供一种传动比为分段连续函数的异形齿轮副,包括第一异形齿轮和第二异形齿轮,第一异形齿轮包含一段圆弧节曲线和一段非圆弧节曲线,第二异形齿轮包含两段同心且半径相同的圆弧节曲线和两段非圆弧节曲线,第一异形齿轮和第二异形齿轮皆为外啮合齿轮。第一异形齿轮的圆弧节曲线与非圆弧节曲线首尾相切连接,构成一条封闭的节曲线;第二异形齿轮的圆弧节曲线与非圆弧节曲线首尾相切连接,构成一条封闭的节曲线。第一异形齿轮与第二异形齿轮节曲线周长的1/2。第一异形齿轮和第二异形齿轮的回转中心为各自圆弧节曲线的圆心。
[0110]
第一异形齿轮节曲线参数记为:
[0111]
第11段非圆弧节曲线转角弧度为α
11
;
[0112]
第12段圆弧节曲线转角弧度为α
12
,半径为r
12
;
[0113]
第二异形齿轮节曲线参数记为:
[0114]
第21段非圆弧节曲线转角弧度为β
21
;
[0115]
第22段圆弧节曲线转角弧度为β
22
,半径为r
22
;
[0116]
第23段非圆弧节曲线转角弧度为β
23
;
[0117]
第24段圆弧节曲线转角弧度为β
24
,半径为r
24
。
[0118]
第11段非圆弧节曲线与第21段及第23段非圆弧节曲线啮合传动比在中心处的极值为i
l
。
[0119]
第12段圆弧节曲线与第22段及第24段圆弧节曲线啮合后的稳定传动比为is。
[0120]
第一异形齿轮与第二异形齿轮中心距为l。
[0121]
第一异形齿轮与第二异形齿轮啮合后的传动比函数为
[0122]
[0123]
第一异形齿轮与第二异形齿轮节曲线参数间存在如下关系:
[0124][0125]
满足上述关系式的取值组合有无数种,可选的一组为:
[0126][0127]
外啮合时,l=148,其节曲线如图7实线所示。
[0128]
内啮合时,l=52,其节曲线如图8实线所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。