1.本实用新型涉及管道保护技术领域,具体为一种用于施工管道的检测装置。
背景技术:
2.管道是用管子、管子联接件和阀门等联接成的用于输送气体、液体或带固体颗粒的流体的装置,通常,流体经鼓风机、压缩机、泵和锅炉等增压后,从管道的高压处流向低压处,也可利用流体自身的压力或重力输送,管道的用途很广泛,主要用在给水、排水、供热、供煤气、长距离输送石油和天然气、农业灌溉、水力工程和各种工业装置中,管道是具有重要战略意义的能源大动脉,同时又具有易燃易爆、有毒有害、环境复杂和隐蔽性强等特点,一旦发生事故极易造成严重危害,因此需要一种用于施工管道的检测装置。
3.现有的管道检测装置存在的缺陷是:
4.专利文件cn111288246a公开了一种管道机器人,保护的权项“该管道机器人包括机体、多个轴向机架、多个周向机架、多个支撑组件、多个驱动轮和电机;通过本技术实施例提供的管道机器人进行管道检测时,由于多个支撑组件中每个支撑组件包括的支撑臂的两端分别连接多个驱动轮中的一个驱动轮,且支撑臂的两端分别与至少两个弹簧组中的至少一个弹簧组的一端连接,因此,当该管道机器人在经过变径区域时,可以通过控制每个驱动轮所在一端的弹簧组进行伸缩来单独改变该驱动轮与管壁的接触位置,从而使多个驱动轮中的每个驱动轮都可以与管壁接触,增强了管道机器人的驱动能力,更易于管道机器人通过变径区域。”,但是现有的管道机器人一般在使用时,没有防撞机构,操作稍有失误,就会被撞毁,严重影响检测效率,因此管道机器人需要保护机构。
技术实现要素:
5.本实用新型的目的在于提供一种用于施工管道的检测装置,以解决上述背景技术中提出的没有防撞机构的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种用于施工管道的检测装置,包括智能控制电缆箱、管道检测机器人、超高清摄像机和防撞支柱,所述智能控制电缆箱的内壁安装有电缆线,所述电缆线的一端安装有管道检测机器人,所述管道检测机器人的外壁安装有防撞支柱,智能控制电缆箱可以自动对电缆线进行收放,电缆线是一种电能或信号传输装置;
7.所述防撞支柱的内壁安装有第一弹簧,所述第一弹簧的一端安装有t型杆,所述t型杆的一端安装有支撑板,所述支撑板的外壁安装有充气胶垫,所述充气胶垫的外壁安装有防撞挡板,所述管道检测机器人的外壁安装有加固支柱,且加固支柱位于防撞支柱的一侧,所述加固支柱的一端套装有固定套筒,所述固定套筒的内壁安装有第二弹簧,第一弹簧具有缓冲作用,防撞挡板为坚固材料制成可以有效抵抗冲撞,充气胶垫具有缓冲作用,支撑板可以对前端防撞机构进行支撑;
8.所述管道检测机器人的顶部安装有伸缩杆,所述伸缩杆的顶端安装有超高清摄像
机,通过伸缩杆可以对超高清摄像机进行升降。
9.优选的,所述智能控制电缆箱的顶部安装有控制终端,通过控制终端可以对管道检测机器人进行控制。
10.优选的,所述管道检测机器人的外壁安装有移动轮,且移动轮位于防撞支柱的一侧,管道检测机器人通过移动轮移动。
11.优选的,所述超高清摄像机的外壁安装有摄像头,摄像头为是一种视频输入设备。
12.优选的,所述超高清摄像机的顶部安装有第一马达,第一马达的输出端安装有丝杠,丝杠的外壁套装有移套,移套的顶部通过轴安装有传动杆,第一马达可以让丝杠转动,丝杠可以带动移套位移,移套带动传动杆运动。
13.优选的,所述超高清摄像机的顶部通过轴安装有主支臂,主支臂的外壁设有调节孔,主支臂的外壁贯穿安装有l型副支臂,l型副支臂的外壁设有收缩槽,收缩槽的内壁安装有第三弹簧,第三弹簧的一端安装有圆头插杆,l型副支臂的顶部安装有拨杆,主支臂的顶部设有滑轨,传动杆带动主支臂转动,主支臂带动l型副支臂转动。
14.优选的,所述l型副支臂的一端安装有第二马达,第二马达的输出端安装有保护盖,保护盖的内壁安装有柔毛,第二马达可以让保护盖转动,保护盖带动柔毛转动可以对摄像头进行清理。
15.与现有技术相比,本实用新型的有益效果是:
16.1.本实用新型通过安装有防撞支柱可以对防撞机构进行支撑,第一弹簧具有缓冲作用,防撞挡板为坚固材料制成可以有效抵抗冲撞,充气胶垫具有缓冲作用,支撑板可以对前端防撞机构进行支撑,部分冲撞力传给t型杆,t型杆通过防撞支柱传给第一弹簧缓解,部分冲撞力传给固定套筒,固定套筒通过加固支柱传给第二弹簧缓解,实现对管道检测机器人的保护;
17.2.本实用新型通过安装有第一马达可以让丝杠转动,丝杠可以带动移套位移,移套带动传动杆运动,传动杆带动主支臂转动,主支臂带动l型副支臂转动,第二马达可以让保护盖转动,保护盖带动柔毛转动可以对摄像头进行清理,通过调节孔可以对保护盖进行一定位移,保护盖与摄像头留有缝隙便于更好的清理掉污物,第三弹簧对圆头插杆施加向外的推力,将圆头插杆按进收缩槽,拨动拨杆控制l型副支臂位移,从而带动保护盖位移,实现对摄像头的清理保护。
附图说明
18.图1为本实用新型的整体结构示意图;
19.图2为本实用新型的防撞机构部分结构示意图;
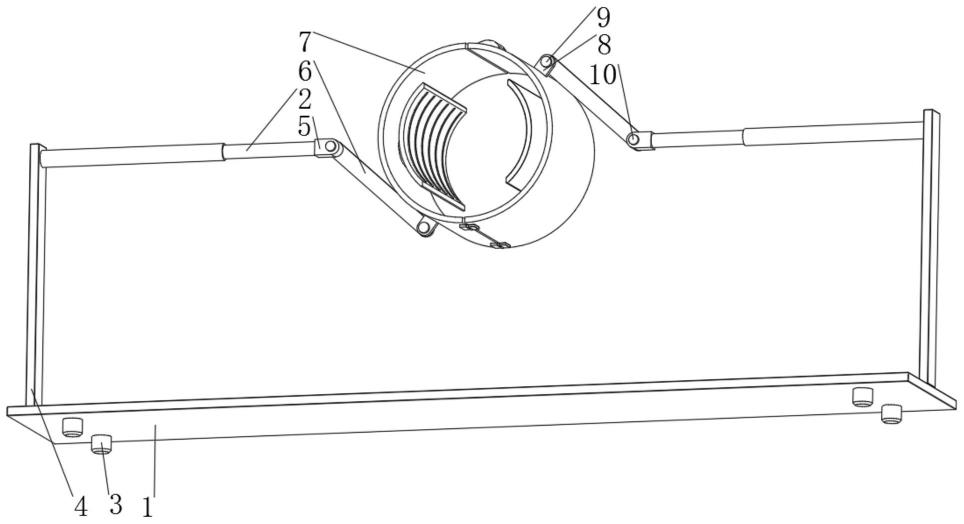
20.图3为本实用新型的摄像头部分结构示意图;
21.图4为本实用新型的收缩槽部分结构示意图。
22.图中:1、智能控制电缆箱;101、电缆线;102、控制终端;2、管道检测机器人;201、伸缩杆;202、移动轮;3、超高清摄像机;301、摄像头;4、防撞支柱;401、第一弹簧;402、t型杆;403、支撑板;404、充气胶垫;405、防撞挡板;406、加固支柱;407、固定套筒;408、第二弹簧;5、第一马达;501、丝杠;502、移套;503、传动杆;6、主支臂;601、调节孔;602、l型副支臂;603、收缩槽;604、第三弹簧;605、圆头插杆;606、拨杆;607、滑轨;7、第二马达;701、保护盖;
702、柔毛。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.在本实用新型的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
25.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体的连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
26.请参阅图1、图3,一种用于施工管道的检测装置,包括智能控制电缆箱1、管道检测机器人2、超高清摄像机3和防撞支柱4,所述智能控制电缆箱1的内壁安装有电缆线101,所述电缆线101的一端安装有管道检测机器人2,所述管道检测机器人2的外壁安装有防撞支柱4,所述管道检测机器人2的顶部安装有伸缩杆201,所述伸缩杆201的顶端安装有超高清摄像机3,所述智能控制电缆箱1的顶部安装有控制终端102,所述管道检测机器人2的外壁安装有移动轮202,且移动轮202位于防撞支柱4的一侧,所述超高清摄像机3的外壁安装有摄像头301,智能控制电缆箱1可以自动对电缆线101进行收放,电缆线101是一种电能或信号传输装置,通过控制终端102可以对管道检测机器人2进行控制,管道检测机器人2一种可沿细小管道内部或外部自动行走、携带一种或多种传感器及操作机械,通过伸缩杆201可以对超高清摄像机3进行升降,管道检测机器人2通过移动轮202移动,超高清摄像机3可以拍摄超高清视频,摄像头301为是一种视频输入设备。
27.请参阅图1、图2,所述防撞支柱4的内壁安装有第一弹簧401,所述第一弹簧401的一端安装有t型杆402,所述t型杆402的一端安装有支撑板403,所述支撑板403的外壁安装有充气胶垫404,所述充气胶垫404的外壁安装有防撞挡板405,所述管道检测机器人2的外壁安装有加固支柱406,且加固支柱406位于防撞支柱4的一侧,所述加固支柱406的一端套装有固定套筒407,所述固定套筒407的内壁安装有第二弹簧408,防撞支柱4可以对防撞机构进行支撑,第一弹簧401具有缓冲作用,防撞挡板405为坚固材料制成可以有效抵抗冲撞,充气胶垫404具有缓冲作用,支撑板403可以对前端防撞机构进行支撑,部分冲撞力传给t型杆402,t型杆402通过防撞支柱4传给第一弹簧401缓解,部分冲撞力传给固定套筒407,固定套筒407通过加固支柱406传给第二弹簧408缓解,实现对管道检测机器人2的保护。
28.请参阅图1、图3和图4,所述超高清摄像机3的顶部安装有第一马达5,第一马达5的输出端安装有丝杠501,丝杠501的外壁套装有移套502,移套502的顶部通过轴安装有传动
杆503,所述超高清摄像机3的顶部通过轴安装有主支臂6,主支臂6的外壁设有调节孔601,主支臂6的外壁贯穿安装有l型副支臂602,l型副支臂602的外壁设有收缩槽603,收缩槽603的内壁安装有第三弹簧604,第三弹簧604的一端安装有圆头插杆605,l型副支臂602的顶部安装有拨杆606,主支臂6的顶部设有滑轨607,所述l型副支臂602的一端安装有第二马达7,第二马达7的输出端安装有保护盖701,保护盖701的内壁安装有柔毛702,第一马达5可以让丝杠501转动,丝杠501可以带动移套502位移,移套502带动传动杆503运动,传动杆503带动主支臂6转动,主支臂6带动l型副支臂602转动,第二马达7可以让保护盖701转动,保护盖701带动柔毛702转动可以对摄像头301进行清理,通过调节孔601可以对保护盖701进行一定位移,保护盖701与摄像头301留有缝隙便于更好的清理掉污物,第三弹簧604对圆头插杆605施加向外的推力,将圆头插杆605按进收缩槽603,拨动拨杆606控制l型副支臂602位移,从而带动保护盖701位移,实现对摄像头301的清理保护。
29.工作原理,智能控制电缆箱1可以自动对电缆线101进行收放,电缆线101是一种电能或信号传输装置,通过控制终端102可以对管道检测机器人2进行控制,管道检测机器人2一种可沿细小管道内部或外部自动行走、携带一种或多种传感器及操作机械,通过伸缩杆201可以对超高清摄像机3进行升降,摄像头301为是一种视频输入设备,防撞支柱4可以对防撞机构进行支撑,第一弹簧401具有缓冲作用,防撞挡板405为坚固材料制成可以有效抵抗冲撞,充气胶垫404具有缓冲作用,支撑板403可以对前端防撞机构进行支撑,部分冲撞力传给t型杆402,t型杆402通过防撞支柱4传给第一弹簧401缓解,部分冲撞力传给固定套筒407,固定套筒407通过加固支柱406传给第二弹簧408缓解,实现对管道检测机器人2的保护,第一马达5可以让丝杠501转动,丝杠501可以带动移套502位移,移套502带动传动杆503运动,传动杆503带动主支臂6转动,主支臂6带动l型副支臂602转动,第二马达7可以让保护盖701转动,保护盖701带动柔毛702转动可以对摄像头301进行清理,通过调节孔601可以对保护盖701进行一定位移,保护盖701与摄像头301留有缝隙便于更好的清理掉污物,第三弹簧604对圆头插杆605施加向外的推力,将圆头插杆605按进收缩槽603,拨动拨杆606控制l型副支臂602位移,从而带动保护盖701位移,实现对摄像头301的清理保护。
30.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。