1.本实用新型涉及实训教学技术领域,尤其涉及一种工业机器人操作平台。
背景技术:
2.随着工业智能水平的提高,工业机器人因其自由度高,能独立完成多个工序过程,面向机器人的实训教育变得越来越重要,教学实训平台应运而生。
3.目前用于机器人实训教育的的工业机器人操作平台,大多是独立工序的配套实训模块布置在工业机器人操作平台上,其无法形成完整的生产线,即使布置可以形成生产线,但占据空间大,无法在有限的工业机器人操作平台空间内设置的,需要机器人反复更换夹具搬运工件。
技术实现要素:
4.本实用新型提供一种工业机器人操作平台,模拟完成生产产品整个生产线,节约平台空间,减少机器人反复更换夹具搬运工件。
5.本实用新型采用以下技术方案:
6.工业机器人操作平台,其特征在于,包括一个多工位转盘机构,设置在该多工位转盘机构对应工位上方的冲压模块、视觉检测模块,以及设置在该多工位转盘机构对应工位一侧的传输模块,通过多工位转盘机构将工件在不同工序上换位。
7.作为上述方案的改进,所述多工位转盘机构包括若干工位,设置在工位下方的转盘,设置在转盘下方的板体,驱动机构,以及支架,板体中心通孔,驱动机构穿过通孔带动转盘旋转,支架固定支撑板体,板体顶面周围均匀布设若干滚轮,对转盘提供稳定支撑。
8.作为上述方案的改进,所述冲压模块包括垂直导轨和沿垂直导轨上下移动的气缸;气缸上设置连接件,其一端沿垂直导轨上下移动,另一端固定连接气缸,气缸的活塞杆端面固定连接冲压板,用以冲压对应转盘工位上的工件。
9.作为上述方案的改进,所述传输模块包括传送带和xy机械臂机构,xy机械臂机构包括x轴横臂、y轴纵臂和支架,x轴横臂设置在支架上,位于传送带和所述转盘工位上方,y轴纵臂在x轴横臂上水平移动,y轴纵臂在传送带上拾取产品装配配件搬运至所述转盘工位内。
10.优选地,所述y轴纵臂为活塞杆端部设置吸盘的气缸。
11.作为上述方案的改进,还包括立体储存库模块,位于立体储存库模块两侧的第二传送带和xy轴搬运模块,第二传送带位于工业机器人和立体储存库模块之间。
12.进一步地,所述xy轴搬运模块包括x轴横臂、y轴纵臂和与所述立体储存库模块的储物入口平行的轨道,y轴纵臂的底端可沿轨道滑动,沿y轴纵臂上下滑动的x轴横臂上设置夹具,夹具沿平行于立体储存库模块的方向伸出和缩回。
13.优选地,所述x轴横臂为活塞杆端部设置夹具的气缸。
14.有益效果
15.本实用新型通过多工位转盘机构,将运输、冲压、检测、装配集中到一个转盘工位上,模拟完成生产产品整个生产线,可以减小在工业机器人操作平台顶部的占用空间,通过转盘将工件在不同工序上的换位,减少了机器人反复更换夹具搬运工件的简单操作。
附图说明
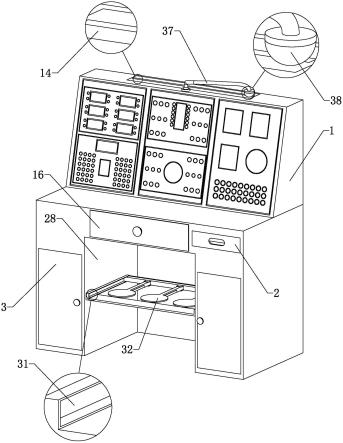
16.图1是本实用新型实施例提供的一种工业机器人操作平台的结构示意图;
17.图2是本实用新型实施例提供的多工位转盘机构的结构示意图;
18.图3是本实用新型实施例提供的冲压模块的结构示意图。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
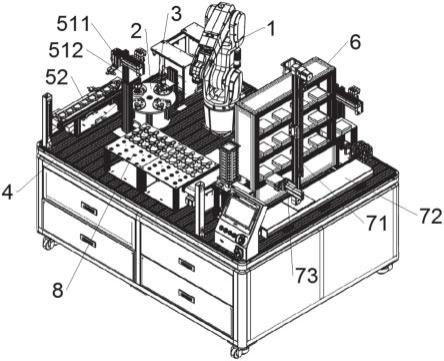
20.参见图1,是本实用新型提供的一种工业机器人操作平台,包括工业机器人1,一个多工位转盘机构2,设置在该转盘对应工位上方的冲压模块3、视觉检测模块4,以及设置在该转盘对应工位一侧的传输模块。运输、冲压、检测、装配集中到一个转盘工位上,可以减小在工业机器人操作平台顶部的占用空间,通过转盘将工件在不同工序上的换位,减少了机器人反复更换夹具搬运工件的简单操作上,使得学员更加集中到工业机器人复杂编程的控制。
21.多工位转盘机构包括四个工位21、转盘22、圆盘23和伺服电机24,该四个工位设置在转盘顶部,转盘底部设置圆盘;圆盘中心通孔231,伺服电机输出轴穿过通孔,输出轴末端通过轴承与转盘底部中心固定连接,使得伺服电机带动转盘水平旋转;圆盘的底面设置若干支撑柱25,该支撑柱底部端面固定在安装座上,安装座26使得整个多工位转盘机构可拆卸地安装在工业机器人操作平台的顶部;圆盘的顶面中心周围均匀布设若干滚轮232,对转盘具有支撑性,旋转稳定性,保证对应工位上实施对应工序时,整个多工位转盘机构的稳定性。由于工位等分设置,伺服电机控制工位旋转角度。圆盘可以为其他形状。
22.冲压模块3包括垂直导轨31、沿垂直导轨上下移动的气缸32和设置在垂直导轨底面端部的安装座33;安装座使得整个冲压模块可拆卸地安装在工业机器人操作平台的顶部;垂直导轨底部与安装座通过第一连接件341连接,气缸的下方设置第二连接件342,其一端沿垂直导轨上下移动,另一端固定连接气缸,气缸的活塞杆端面固定连接冲压板321,用以冲压对应转盘工位上的工件。
23.视觉检测模块为一工业相机,通过拍摄采集工件图像,对对于工序的组装工件进行检测。
24.传输模块包括xy机械臂机构和传送带52。xy机械臂机构包括x轴横臂511、y轴纵臂512和支架,x轴横臂设置在支架上,位于传送带和转盘工位上方,y轴纵臂在x轴横臂上水平移动,x轴横臂与y轴纵臂均为气缸,y轴纵臂滑动到传送带上方气缸推出活塞杆,活塞杆端部设置吸盘,拾取产品装配配件,活塞杆收回后y轴纵臂水平滑动到转盘工位上方,气缸推出活塞杆,夹具将产品装配配件放置到转盘工位内。可选地,y轴纵臂为电机驱动的夹具沿上下移动的其他滑块结构。
25.工业机器人操作平台还包括立体储存库模块6,位于立体储存库模块相对两侧的
第二传送带和xy轴搬运模块,第二传送带位于工业机器人和立体储存库模块之间。
26.立体储存库模块为若干平板垂直间隔设置的储物架。
27.xy轴搬运模块的y轴纵臂71的底端与工业机器人操作平台顶部的轨道72滑动连接,该轨道平行于立体储存库模块的储物入口,y轴纵臂上设置可沿y轴纵臂上下滑动的x轴横臂73,可使x轴横臂上夹持的工件放置到不同高度或不同层数的立体储存库模块内。
28.x轴横臂为一气缸,其活塞杆端部设置夹具,其活塞杆伸出方向与立体储存库模块的平板平行,使得夹具夹持的工件可以放到立体储存库模块平板板面的合适位置上。
29.工作过程:产品为三叶指尖led发光陀螺,工业机器人从原料放置模块8依次拾取下轴承盖、透明下壳依次放置到转盘上的一个工位上,旋转至冲压模块对应的工位,冲压模块冲压,转盘再旋转至传输带模块的工位上,xy机械臂机构将传输模块上的载有led发光芯片的pcb板配件放置到透明下壳上,转盘旋转至初始位,工业机器人从原料放置模块拾取透明上壳放置在工位上以盖住载有led发光芯片的pcb板配件,工业机器人更换夹具,用螺丝固定透明下壳与透明上壳,再次拾取上轴承盖放置透明上壳上,转盘旋转至冲压模块对应的工位,冲压模块冲压上轴承盖,冲压后完成成品,转盘旋转,载有成品工位被带至视觉检测模块对应的工位处,视觉检测模块对成品的组装位,如螺丝位,卡接位等进行检测,检测没有问题后,产品组装生产线的工序结束。
30.进一步地,视觉检测模块检测产品成品没有问题后,工业机器人拾取成品旋转到第二传送带处,将成品放入第二传送带上的包装底盒内,第二传送带上途中利用xy机械臂机构将包装盒盖放上包装底盒完成包装,xy轴搬运模块利用其夹具在立体储存库模块宽度侧边位置拾取包装好的工件,放入立体储存库模块。至此,模拟完成从产品生产到包装存储入库整个生产线。
31.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。