技术特征:
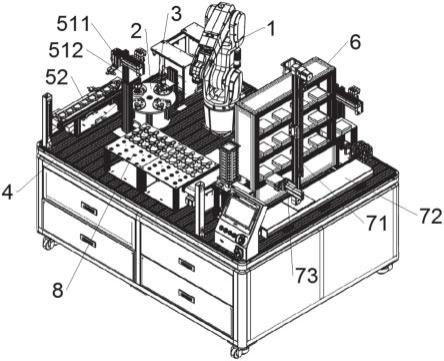
1.工业机器人操作平台,其特征在于,包括一个多工位转盘机构,设置在该多工位转盘机构对应工位上方的冲压模块、视觉检测模块,以及设置在该多工位转盘机构对应工位一侧的传输模块,通过多工位转盘机构将工件在不同工序上换位。2.如权利要求1所述的工业机器人操作平台,其特征在于,所述多工位转盘机构包括若干工位,设置在工位下方的转盘,设置在转盘下方的板体,驱动机构,以及支架,板体中心通孔,驱动机构穿过通孔带动转盘旋转,支架固定支撑板体,板体顶面周围均匀布设若干滚轮,对转盘提供稳定支撑。3.如权利要求1所述的工业机器人操作平台,其特征在于,所述冲压模块包括垂直导轨和沿垂直导轨上下移动的气缸;气缸上设置连接件,其一端沿垂直导轨上下移动,另一端固定连接气缸,气缸的活塞杆端面固定连接冲压板,用以冲压对应转盘工位上的工件。4.如权利要求3所述的工业机器人操作平台,其特征在于,所述传输模块包括传送带和xy机械臂机构,xy机械臂机构包括x轴横臂、y轴纵臂和支架,x轴横臂设置在支架上,位于传送带和所述转盘工位上方,y轴纵臂在x轴横臂上水平移动,y轴纵臂在传送带上拾取产品装配配件搬运至所述转盘工位内。5.如权利要求4所述的工业机器人操作平台,其特征在于,所述y轴纵臂为活塞杆端部设置吸盘的气缸。6.如权利要求1所述的工业机器人操作平台,其特征在于,还包括立体储存库模块,位于立体储存库模块两侧的第二传送带和xy轴搬运模块,第二传送带位于工业机器人和立体储存库模块之间。7.如权利要求6所述的工业机器人操作平台,其特征在于,所述xy轴搬运模块包括x轴横臂、y轴纵臂和与所述立体储存库模块的储物入口平行的轨道,y轴纵臂的底端可沿轨道滑动,沿y轴纵臂上下滑动的x轴横臂上设置夹具,夹具沿平行于立体储存库模块的方向伸出和缩回。8.如权利要求7所述的工业机器人操作平台,其特征在于,所述x轴横臂为活塞杆端部设置夹具的气缸。
技术总结
本实用新型公开了一种工业机器人操作平台,其包括一个多工位转盘机构,设置在该多工位转盘机构对应工位上方的冲压模块、视觉检测模块,以及设置在该多工位转盘机构对应工位一侧的传输模块,通过多工位转盘机构将工件在不同工序上换位。本实用新型通过多工位转盘机构,将运输、冲压、检测、装配集中到一个转盘工位上,模拟完成生产产品整个生产线,可以减小在工业机器人操作平台顶部的占用空间,通过转盘将工件在不同工序上的换位,减少机器人反复更换夹具搬运工件。更换夹具搬运工件。更换夹具搬运工件。
技术研发人员:王承勇 黄莉莉 阮毅 李锐华 陈国宝
受保护的技术使用者:广东省机械研究所有限公司
技术研发日:2022.06.30
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。