1.本说明书一个或多个实施例涉及螺栓生产设备技术领域,尤其涉及一种带塑料垫片螺栓生产设备。
背景技术:
2.普通螺栓上不会带有塑料垫片,需要安装时再装上去,比较麻烦。如果是临时安装的垫片,也会让垫片与普通螺栓之间会相对运动。当需要垫片与普通螺栓之间保持静止难以做到。需要将塑料垫片以注塑的形式安装到普通螺栓上,但是由于普通螺栓整体直径不一,导致排布困难。
技术实现要素:
3.有鉴于此,本实用新型的目的在于提出一种带塑料垫片螺栓生产设备,以解决普通螺栓排布困难的问题。
4.基于上述目的,本实用新型提供了一种带塑料垫片螺栓生产设备,包括:
5.螺栓筛选机,包括筛选机架、转动电机、转动盘和筛选轨道;所述转动电机带着转动盘转动,转动盘内放入普通螺栓,筛选轨道一端与转动盘的内侧壁接触;注塑机,对普通螺栓直径大的一端注塑成型塑料垫片;码放机器人,设置在筛选轨道边上,提取筛选轨道上排序好的普通螺栓送到注塑机内。
6.作为本技术的进一步改进,所述筛选轨道包括上升段、螺旋下降段和直线下降段,上升段的一端与转动盘的内侧壁接触,另一端连接螺旋下降段的竖直高度高的一端,螺旋下降段的竖直高度低的一端与直线下降段竖直高度高的一端连接,直线下降段竖直高度低的一端封闭,所述码放机器人设置在直线下降段边上,提取直线下降段上排序好的普通螺栓送到注塑机内。
7.作为本技术的进一步改进,所述上升段的横截面为l形,横截面的竖直段与转动盘的内侧壁接触,横截面的水平段与转动盘的底部接触。
8.作为本技术的进一步改进,所述螺旋下降段包括两个螺旋杆,两根螺旋杆之间的距离大于普通螺栓直径小的一端的直径,小于普通螺栓直径大的一端的直径。
9.作为本技术的进一步改进,所述直线下降段包括两个相互平行的直杆,两个直杆之间的距离大于普通螺栓直径小的一端的直径,小于普通螺栓直径大的一端的直径。
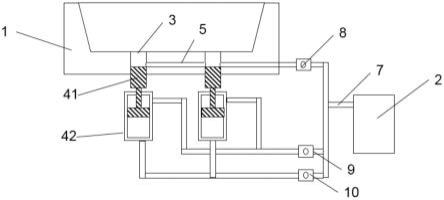
10.作为本技术的进一步改进,所述带塑料垫片螺栓生产设备还包括一个码放器,所述码放器设置在筛选轨道远离转动盘的一端附近,码放器包括一个码放板,所述码放板的上表面设有码放孔。
11.作为本技术的进一步改进,所述码放机器人包括前置机器人和后置机器人,所述前置机器人将筛选轨道的普通螺栓送到码放孔内,后置机器人将码放板上的普通螺栓送到注塑机上。
12.作为本技术的进一步改进,所述码放板的上表面的码放孔的排位布置与所述注塑
机内的垫片注塑位置一致。
13.从上面所述可以看出,本实用新型提供的一种带塑料垫片螺栓生产设备,通过螺栓筛选机将普通螺栓栓选成大头向上,小头向下,竖直地排布传送,进而有效解决排布困难的问题。
附图说明
14.为了更清楚地说明本说明书一个或多个实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本说明书一个或多个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
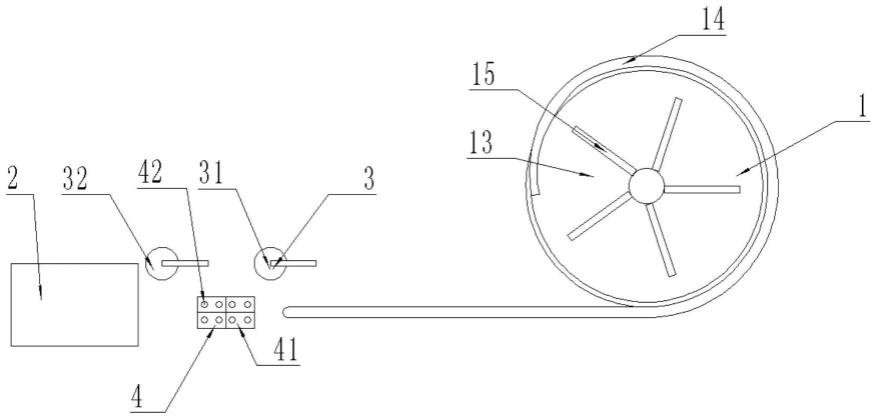
15.图1为本说明书一个或多个实施例带塑料垫片螺栓生产设备的俯视结构示意图;
16.图2为本说明书一个或多个实施例带塑料垫片螺栓生产设备的正视结构示意图。
17.图中,1、螺栓筛选机;11、筛选机架;12、转动电机;13、转动盘;14、筛选轨道;15、搅拌条;2、注塑机;3、码放机器人;31、前置机器人;32、后置机器人;4、码放器;41、码放板;42、码放孔。
具体实施方式
18.为使本实用新型的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本实用新型进一步详细说明。
19.需要说明的是,除非另外定义,本实用新型实施例使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
20.一种带塑料垫片螺栓生产设备,包括:
21.螺栓筛选机1,包括筛选机架11、转动电机12、转动盘13和筛选轨道14;所述转动电机12带着转动盘13转动,转动盘13内放入普通螺栓,筛选轨道14一端与转动盘13的内侧壁接触;所述转动盘13的底部还设有搅拌条15,所述搅拌条15固定设置在转动盘13底部,所述搅拌条15采用弹性材料制作。
22.注塑机2,对普通螺栓直径大的一端注塑成型塑料垫片;
23.码放机器人3,设置在筛选轨道14边上,提取筛选轨道14上排序好的普通螺栓送到注塑机2内。
24.为了能够将转动盘13内的普通螺栓进行筛选,所述筛选轨道14包括上升段、螺旋下降段和直线下降段,上升段的一端与转动盘13的内侧壁接触,另一端连接螺旋下降段的竖直高度高的一端,螺旋下降段的竖直高度低的一端与直线下降段竖直高度高的一端连接,直线下降段竖直高度低的一端封闭,所述上升段的前一段横截面为l形,横截面的竖直
段与转动盘13的内侧壁接触,横截面的水平段与转动盘13的底部接触。所述上升段靠近螺旋下降段的部分底面向上翘曲,横截面为偏转的v形,竖直面还是竖直的,底面为斜面。
25.转动盘13内的普通螺栓在旋转过程中就会相互挤压的进入上升段内,不稳定的而部分会掉落,稳定的部分会在偏转的v形部分变成纵向排布,进而进入螺旋下降段,所述螺旋下降段包括两个螺旋杆,两根螺旋杆之间的距离大于普通螺栓直径小的一端的直径,小于普通螺栓直径大的一端的直径。普通螺栓在两根螺旋杆之间变成竖直转,直径大的一端在上部挂着,直径小的一端在下方。所述直线下降段包括两个相互平行的直杆,两个直杆之间的距离大于普通螺栓直径小的一端的直径,小于普通螺栓直径大的一端的直径。普通螺栓在直线下降段上依次排布,顺利后续的抓取。
26.所述码放机器人3设置在直线下降段边上,提取直线下降段上排序好的普通螺栓送到注塑机2内。
27.为了便于布置到注塑机2内,所述带塑料垫片螺栓生产设备还包括一个码放器4,所述码放器4设置在筛选轨道14远离转动盘13的一端附近,码放器4包括一个码放板41,所述码放板41的上表面设有码放孔42。
28.所述码放机器人3包括前置机器人31和后置机器人32,所述前置机器人31将筛选轨道14的普通螺栓送到码放孔42内,后置机器人32将码放板41上的普通螺栓送到注塑机2上。前置机器人31每次抓取的普通螺栓的数量少,但是抓取的速度快,后置机器人32每次抓取的普通螺栓的数量多,但是抓取的速度慢,进而让前置机器人31和后置机器人3单位时间内总抓取的普通螺栓的数量相等。所述码放板41的上表面的码放孔42的排位布置与所述注塑机2内的垫片注塑位置一致。
29.所属领域的普通技术人员应当理解:以上任何实施例的讨论仅为示例性的,并非旨在暗示本公开的范围(包括权利要求)被限于这些例子;在本实用新型的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本实用新型的不同方面的许多其它变化,为了简明它们没有在细节中提供。
30.本实用新型的实施例旨在涵盖落入所附权利要求的宽泛范围之内的所有这样的替换、修改和变型。因此,凡在本实用新型的精神和原则之内,所做的任何省略、修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。