1.本发明属于飞行器技术领域,尤其是涉及一种超轻结构及带控制系统的仿生蜂鸟扑翼飞行器。
背景技术:
2.仿生微型扑翼飞行器是微电子、微机械技术的发展所带来的新型技术,通过研发微型仿生飞行器,可以提高对于该领域的科学研究及技术应用,通过无线电信号远程操控仿生飞行器完成一系列的各种任务。
3.国外对于微型飞行器的国防军事方面有很大预期,蜂群战术等都依赖于各种微型仿生飞行器的研究开发。仿生扑翼飞行器可以作为无人机平台,搭载各种平台,以完成侦查、攻击、通信等。
4.现有的扑翼飞行器,存在着起飞都十分困难的情况,因为扑翼翅膀的升力小电池能量有限,垂直起降蜂鸟飞行器更是消耗远大于平飞固定翼式飞行器,最大限度的降低飞行器重量同时保证结构强度成为研究重点,需要在材料和结构中取得平衡,既轻又能够承载机体的扑动。
5.微型扑翼飞行器工作在低雷诺数气流环境下,气动效率不高、载荷也很小,通过研究和学习蜂鸟及昆虫尺度的扑翼系统,改进扑翼飞行器的翅膀形状、扑动角度、扑动频率和功耗来实现更高效的研究已经成为热点。
6.现有的仿生蜂鸟扑翼布局上,大多将电机布局在顶部,这种布局会使重心分布更加不稳,本发明将驱动电机布置在靠近机体重心的位置,稳定的重心有利于姿态的稳定。
7.另一方面,现有的扑翼一般采用舵机控制翼面或重心来控制飞行器姿态,现有的微型舵机系统在重量上比较重,这也导致许多研究者的仿生扑翼难以起飞,电磁舵重量约0.5g,但是需要控制电路模块,加起来重量也会很大,都需要研究开发新的设计。电子器件的微型化和轻量化是扑翼研究进展的重要飞行,国内的微型舵机重量一般在1.5-2g,如果使用三台舵机重量至少4.5g,这样的重量会使扑翼起飞都十分困难。
8.扑翼飞行器中常用的传动有齿轮和传动带,而扑翼高速运行时扭矩也非常大,在微小的空间电池一般都是3.7v,用两块串联电池7.4v来驱动一些扑翼飞行器,会增大系统的重量,电机能够以3.7v低电压单电池来驱动扑翼对于该类飞行器都非常重要。
9.现有的扑翼控制系统的控制板采用pcb材料为主,随着电子器件和功能的增多,pcb板子的面积会增大,重量也较重,研究新材料轻型电路板载飞控领域的应用和设计需要重视。该类仿生扑翼飞行器使用空心杯直流电机的型号非常多,而直流空心杯电机功率小、寿命短是扑翼飞行器上比较落后的电机。
技术实现要素:
10.本发明提供了一种超轻结构及带控制系统的仿生蜂鸟扑翼飞行器,通过结构和材料的改进,大大降低了飞行器的整体质量,提高了稳定性,可以在不外接电源线、仅依靠电
池供电的情况下实现真正意义上的扑翼飞行。
11.一种超轻结构及带控制系统的仿生蜂鸟扑翼飞行器,包括机架以及固定在机架上的翅膀系统、动力传动系统、俯仰舵机控制系统、滚转舵机控制系统以及微型一体化的柔性折叠电路板系统;
12.所述的机架由碳纤维切割板组成,包括上框架和下框架,其中,上框架包括上底板带轮架、底板连接件和下底板带轮架;下框架包括悬架、与悬架固定的前支撑架和后支撑架、固定在前支撑架和后支撑架下端的底座;所述的悬架通过第一挂耳与下底板带轮架的下表面固定;
13.所述的翅膀系统由左右一对翅膀组成,每个翅膀包括可转动固定在上底板带轮架下表面的翅膀带轮、固定在翅膀带轮上的翅杆、固定在下底板带轮架下表面的第二挂耳、可转动固定在第二挂耳上的翼杆旋转架、固定在翼杆旋转架上的翼根杆、与翅杆及翼根杆固定的翼膜,所述的翼膜上设有翅脉,翼膜在靠近机架的翼根处设有翼膜挖孔;
14.所述的动力传动系统通过带动翅膀带轮的往复转动,来实现一对翅膀的扑翼运动。
15.进一步地,所述的动力传动系统包括电机、大齿轮、大带轮、连杆和传动带;
16.所述的电机固定在下底板带轮架的下表面,大齿轮可转动的固定在下底板带轮架的上表面,电机输出端的电机齿轮穿过下底板带轮架后与大齿轮啮合;大齿轮上固定有齿轮摇臂,所述的齿轮摇臂通过连杆与大带轮连接,电机的输出通过大齿轮和连杆后转化为大带轮的往复运动;
17.传动带由两圈细绳组成,传动带的一端套设在一个翅膀带轮上,另一端经过大带轮后相互交叉,并套设在另一个翅膀带轮上。
18.进一步地,所述的俯仰舵机控制系统包括固定在上框架前侧的俯仰舵机安装架以及固定在舵机安装架上的俯仰舵机;所述的俯仰舵机上设有第一碳纤维舵臂,第一碳纤维舵臂与金属丝的一端连接,金属丝的另一端与前支撑架的上端孔连接。
19.优选地,所述俯仰舵机与俯仰舵机安装架上的机架安装孔通过螺丝固定,或者,所述俯仰舵机与俯仰舵机安装架通过胶水固定。
20.进一步地,所述的滚转舵机控制系统包括固定在后支撑架上滚转舵机安装架以及固定在滚转舵机安装架上的滚转舵机;所述的滚转舵机上设有第二碳纤维舵臂,第二碳纤维舵臂与金属丝连杆的一端连接,金属丝连杆的另一端与第三挂耳连接,第三挂耳固定在悬架的下端面。
21.进一步地,所述的柔性折叠电路板系统以可折叠的柔性电路板为基板,柔性电路板上设有升压降压电源、mcu单片机、气压针、惯导传感器、磁力计、无线通信模块以及天线;
22.升压降压电源采用mp28163芯片方案,用于将电池电压3.7v升高后再降低给其它元件;mcu单片机输出控制pwm信号给动力传动系统、俯仰舵机控制系统和滚转舵机控制系统。
23.优选地,所述的翼膜挖孔的形状为三角形,翼膜挖孔的面积占翼膜的1/30~1/20。进一步优选地,翼膜挖孔的面积占翼膜的1/24。
24.所述的第一挂耳与下底板带轮架之间通过碳纤维材料的卡扣机构配合胶水固定;所述的悬架与第一挂耳之间通过铆钉和垫片固定。
25.所述的底座在中间位置设有用于对两根翼根杆进行分别限位的腰型孔。
26.所述翅脉由0.3-0.5mm的碳纤维杆构成,通过胶水或胶带固定在翼膜上;所述的翅杆插进翅膀带轮的孔结构后用胶水固定,翼膜的上端部缠绕翅杆固定,翼膜的翼根部位套在翼根杆上。
27.与现有技术相比,本发明具有以下有益效果:
28.1、本发明将动力系统电机设计在在整个机体的重心部位,使得飞行器稳定性提高。
29.2、本发明的动力传动系统中,采用单个大带轮缠绕传送带,与电机及两个翅膀带轮传动配合,完成一堆翅膀的扑翼运动,整个结构稳定性高,有利于扑翼动作的连续性。
30.3、本发明在在电子电路上,设计了专用的超轻电路板,微型一体化的柔性折叠电路板可以折叠,可以将惯导部分水平放置在扑翼飞行器机身,折叠主控部分,实现超低重量和空间面积。
31.4、本发明采用超轻结构的舵机,单个仅重0.5g,配合碳纤维舵臂和金属丝连杆,超轻的舵机系统大大提高了飞行器续航时间。
32.5、本发明的翅膀部分根据仿生学原理,观察蜂鸟和甲虫的飞行原理,翼根部分的线速度非常低,将人造仿生扑翼的翼根处挖孔,这一方式可以降低飞行阻力,有利于扑翼的续航和机动性。
附图说明
33.图1为本发明一种超轻结构及带控制系统的仿生蜂鸟扑翼飞行器整体结构图;
34.图2为本发明中机架的结构图;
35.图3为本发明中翅膀系统的结构图;
36.图4为本发明中动力传动系统的结构图;
37.图5为动力传动系统中大带轮的结构示意图;
38.图6为动力传动系统中传动带和大带轮配合示意图;
39.图7为本发明中俯仰舵机控制系统的结构示意图;
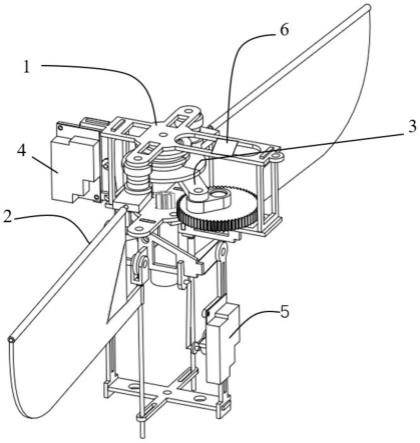
40.图8为本发明中滚转舵机控制系统的结构示意图;
41.图9为本发明中柔性折叠电路板系统的结构示意图。
具体实施方式
42.下面结合附图和实施例对本发明做进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
43.如图1所示,一种超轻结构及带控制系统的仿生蜂鸟扑翼飞行器,包括机架1以及固定在机架1上的翅膀系统2、动力传动系统3、俯仰舵机控制系统4、滚转舵机控制系统5以及微型一体化的柔性折叠电路板系统6。
44.如图2所示,机架1由1mm厚的碳纤维切割板组成,为了减轻自重对部件进行了尽可能保证机体强度的前提下挖空减重。具体包括上框架和下框架,其中,上框架包括一个上底板带轮架101、两个底板连接件102和一个下底板带轮架103。下框架包括悬架104、与悬架104固定的前支撑架105和后支撑架109、固定在前支撑架105和后支撑架109下端的底座
106。悬架104通过第一挂耳107与下底板带轮架103的下表面固定。底座106在中间位置设有两个腰型孔108。
45.本实施例中,第一挂耳107与下底板带轮架103之间通过碳纤维材料的卡扣机构配合胶水固定;悬架104与第一挂耳107之间通过铆钉和垫片固定。悬架104和前支撑架105、后支撑架109之间可以采用碳纤维切割板固定或者3d打印材料固定。
46.如图3所示,翅膀系统由左右一对翅膀组成,每个翅膀包括可转动固定在上底板带轮架101下表面的翅膀带轮201、固定在翅膀带轮201上的翅杆202、固定在下底板带轮架103下表面的第二挂耳203、可转动固定在第二挂耳203上的翼杆旋转架204、固定在翼杆旋转架204上的翼根杆206、与翅杆202及翼根杆206固定的翼膜208。翼膜208上设有多根翅脉207,翼膜208在靠近机架1的翼根处设有翼膜挖孔205;本实施例中,翼膜挖孔205的形状为三角形,翼膜挖孔205的面积占翼膜208的1/24,翼膜挖孔205可以降低空气阻力。
47.翅脉207由0.3-0.5mm的碳纤维杆构成,通过胶水或胶带固定在翼膜208上加强翅膀结构强度。翅杆202插进翅膀带轮201的孔结构后用胶水固定,翼膜208的上端部折叠1cm缠绕翅杆202固定,翼膜208的翼根部位套在翼根杆206上。底座106在中间位置的两个腰型孔108用于对两根翼根杆206进行分别限位。
48.翅膀本身并非竖直,而是与竖直方向呈30度夹角获得最佳升力。翼根杆206可以绕第二挂耳203转动,表现为翼根杆206上下运动,整个机体做出滚转动作。
49.如图4所示,动力传动系统3包括电机301、大齿轮303、大带轮306、连杆305和传动带309。具体的,电机301使用空心杯直流电机或者无刷电机,电机301固定在下底板带轮架103的下表面,大齿轮303可转动的固定在下底板带轮架103的上表面,电机301输出端的电机齿轮304穿过下底板带轮架103后与大齿轮303啮合;大齿轮303上固定有齿轮摇臂302,齿轮摇臂302通过连杆305与大带轮306连接,电机301的输出的动力通过齿轮和连杆系统后转化为大带轮306的往复运动。大带轮306上端面设有垫片307,配合转轴与上底板带轮架101可转动固定。
50.如图5所示,大带轮306的下端面设有安装孔310,连杆305通过安装孔310与大带轮可转动连接。
51.如图6所示,传动带309的一端套设在一个翅膀带轮201上,另一端经过大带轮306后相互交叉,并套设在另一个翅膀带轮201上。
52.大带轮306和2个翅膀带轮201配合传动带309组成绳传动系统,大带轮的往复运动带动2个翅膀带轮201正反转动,传动到翅膀成为扑动动作,大带轮306和翅膀带轮201组成的扑动系统需要稳定的传动带309。大带轮306和2个翅膀带轮201上均缠绕双面胶,用于增大传送带309的摩擦力,传动带309由两圈细绳组成,绳子在带轮上均缠绕2圈并加上胶水增强坚固度,组成一种具有柔性和坚固的传动系统。
53.如图7所示,俯仰舵机控制系统4包括固定在上框架前侧的俯仰舵机安装架402以及固定在俯仰舵机安装架402上的俯仰舵机406;俯仰舵机406上设有第一碳纤维舵臂403,第一碳纤维舵臂403与金属丝404的一端连接,金属丝404的另一端与前支撑架105的上端孔405连接。
54.俯仰舵机406运动时,上部分机架绕第一挂耳107旋转构成俯仰姿态控制。俯仰舵机406与舵机安装架402上的机架安装孔401通过螺丝固定,或者,为了减轻重量,俯仰舵机
406与舵机安装架可以通过胶水固定。
55.如图8所示,滚转舵机控制系统5包括固定在后支撑架109上滚转舵机安装架503以及固定在滚转舵机安装架503上的滚转舵机505;滚转舵机505上设有第二碳纤维舵臂504,第二碳纤维舵臂504与金属丝连杆502的一端连接,金属丝连杆502的另一端与第三挂耳501连接,第三挂耳501固定在悬架104的下端面。
56.滚转舵机505及第二碳纤维舵臂504、金属丝连杆503、第三挂耳501构成滚转控制机构,整体绕第三挂耳503旋转,,滚转舵机505固定在滚转舵机安装架503上,安装方式同俯仰舵机安装架402一样。
57.本实施例中,将(sub-micro 0.5g lz)舵机使用在扑翼飞行器中,单个俯仰舵机406和滚转舵机505仅重0.5g。第一碳纤维舵臂403、金属丝404、第二碳纤维舵臂504、金属丝连杆503均采用0.5mm的直径。超轻的舵机控制系统大大提高了飞行器续航时间。
58.如图9所示,柔性折叠电路板系统6以可折叠的柔性电路板608为基板,柔性电路板608上设有升压降压电源601、mcu单片机602、气压针603、惯导传感器604、磁力计605、无线通信模块606以及天线607。
59.升压降压电源601采用mp28163芯片方案,用于将电池电压3.7v(稳态)升高并降低给其它元件,使得整体电源稳定性提高。mcu单片机602输出控制pwm信号给动力传动系统3、俯仰舵机控制系统4和滚转舵机控制系统5。
60.mcu单片机602采用单片机如stm32f411ceu6型号;气压计603气压计spl006,作为飞行器高度估测传感器,与惯导传感器604所测的数据融合就散飞行器数据,惯导传感器604可采用icm-20608等型号;无线通信模块606负责和遥控器通信接收指令,左侧的天线107为陶瓷天线或导线天线,磁力计605使用hmc5883l。整个柔性折叠电路板系统6仅重1.5g。
61.以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。