1.本实用新型涉及一种定位辅助装置,具体的是涉及一种用于物流站机械臂传感器定位辅助装置,主要是用于对物流站机械臂传感器进行辅助定位,属于烟草机械辅助定位技术领域。
背景技术:
2.通常来说,包装机在生产香烟的过程中,需要添加内框纸、内衬纸、条盒油封纸和小盒油封纸四种包装辅料,这四种辅料统一由包装机物流站供给。物流站供给传递辅料过程中,当辅料耗尽需要更换时,需由机械臂抓取辅料纸卷放置于固定位置。其中机械臂依靠两个激光传感器和一个光电传感器完成两个功能:一个功能是测量辅料卷筒的芯孔直径,工控机根据传感器测量直径值结合传感器位置坐标精准计算出辅料卷筒圆心坐标;另一个功能是测量辅料堆垛层数高度,工控机根据传感器测量高度值结合传感器位置坐标精准计算出辅料卷筒数量。
3.由于工控机计算数据准确度高度依赖于传感器位置和精度,传感器的安装位置与机械臂中心存在严格的固定位置关系,所以需要机械臂传感器定位辅助装置协助调整定位传感器,确保机械臂准备抓取辅料卷筒。此外,为了防止机械臂长期工作后出现定位偏差的情况,还需要定期检查标定传感器,因此要求机械臂传感器定位辅助装置便于拆卸安装,且能够根据实际情况灵活调整。
4.现有机械臂无传感器定位辅助装置,导致目前调整传感器位置全凭感觉和经验,人工定位方式复杂繁琐,可靠性差。且定期维护难度大,耗费较多时间调整后,效果依旧不明显。
5.因此,需研制一种构造简易和定位精准的用于物流站机械臂传感器定位辅助装置是解决上述技术问题的关键所在。
技术实现要素:
6.针对上述背景技术中存在的诸多缺陷与不足,本实用新型对此进行了改进和创新,目的在于提供一种构造简易、设计新颖合理,提高了定位机械臂传感器的效率和准确度,避免出现机械臂定位不准无法抓取或碰撞辅料的情况;解决了传统的调整传感器位置全凭感觉和经验,人工定位方式复杂繁琐,可靠性差。且定期维护难度大,耗费较多时间调整后,效果依旧不明显的技术难题。
7.为解决上述问题并达到上述的发明目的,本实用新型一种用于物流站机械臂传感器定位辅助装置是通过采用下列的设计结构以及采用下列的技术方案来实现的:
8.一种用于物流站机械臂传感器定位辅助装置,包括:
9.上圆盘(1);
10.多个固定限位件(11),固定限位件(11)设置于上圆盘(1)上;
11.多个定位销(12),定位销(12)连接于圆盘(1)上;
12.若干根可调连接杆(2),各可调连接杆(2)一端连接上圆盘(1),各可调连接杆(2)另一端连接下圆盘(3);
13.下圆盘(3),下圆盘(3)穿套于可调连接杆(2)上,且下圆盘(3)在可调连接杆(2)上上下来回移动调整距离,端部通过紧固组件(4)紧固为一整体。
14.优选的,所述上圆盘(1)的顶端端面分别开设有多个安装凹槽(13)和定位销槽(14)以及贯通正反面的固定螺丝孔(15)。
15.优选的,所述固定限位件(11)为强力圆形磁铁,该强力圆形磁铁镶嵌于安装凹槽(13)内与上圆盘(1)连为一整体。
16.优选的,所述定位销(12)固定插设于定位销槽(14)内与上圆盘(1)连为一整体。
17.优选的,所述可调连接杆(2)整体为方形柱状体构件,在该方形柱状体构件的顶部开设有盲孔(21),螺丝钉(5)从上至下依序穿过固定螺丝孔(15)和该盲孔(21)后将可调连接杆(2)与上圆盘(1)可拆卸连为一整体。
18.优选的,所述可调连接杆(2)上等距或是不等距开设有若干个贯通正反面的可调安装孔(22),可调安装孔(22)沿可调连接杆(2)的长度方向开设。
19.优选的,所述下圆盘(3)上开设有多个贯通正反面的限位安装孔(31),限位安装孔(31)处对称延伸设有限位件(311),各限位件(311)上开设有贯通正反面的限位孔(3111)。
20.优选的,所述下圆盘(3)通过限位安装孔(31)穿套于可调连接杆(2)上,螺栓穿过限位孔(3111)和可调安装孔(22)将下圆盘(3)与可调连接杆(2)可拆卸连为一整体,且端部通过紧固螺母紧固。
21.优选的,所述限位孔(3111)和所述可调安装孔(22)均为螺栓孔。
22.优选的,在上圆盘(1)、可调连接杆(2)和下圆盘(3)以及紧固组件(4)的外表面上均从内至外依序设置有注塑层、防锈层和防水层以及警示层,警示层上涂有荧光粉。
23.工作原理是:上述设计结构的一种用于物流站机械臂传感器定位辅助装置在进行使用之前,需要将其已经制作完成的该一种定位辅助装置加以安装作为备用。
24.具体的制作步骤是:上圆盘(1)分别在顶部上侧、左侧、右侧开设三个定位销槽(14)用于安装定位销(12),上圆盘(1)在顶部开设四个安装凹槽(13)用于安装固定限位件(11),上圆盘(1)开设四个固定螺丝孔(15)用于连接可调连接杆(2)。
25.制作4根相同的可调连接杆(2),在距离顶端5cm、10cm、15cm和20cm处,开设四个可调安装孔(22)。可调连接杆(2)顶端开设螺丝孔,使用螺丝钉(5)用于连接固定上圆盘(1)的四个固定螺丝孔(15)。
26.下圆盘(3)上开设四个限位安装孔(31)用于连接可调连接杆(2),下圆盘(3)在底部限位安装孔(31)处焊接限位件(311),在限位件(311)开设限位孔(3111)用于连接固定可调连接杆(2)。下圆盘(3)设置三个传感器光束标记点。
27.具体的安装步骤是:首先,工作人员只需将本实用新型的定位销(12)固定安装于上圆盘(1)顶部的三个定位销槽(14)内。然后,将固定限位件(11)固定安装于上圆盘(1)顶部的四个安装凹槽(13)内。紧接着,将四根可调连接杆(2)顶端对齐上圆盘(1)的四个固定螺丝孔(15),使用螺丝钉(5)用于连接固定上圆盘(1)。然后,将固定住上圆盘(1)的四根可调连接杆(2)插入下圆盘(3)的四个限位安装孔(31),最后,调整下圆盘(3)至合适的工作位置的可调安装孔(22)处,用紧固组件(4)连接限位件(311)紧固位置,从而完成本实用新型
的安装,安装完成后即可进行使用。
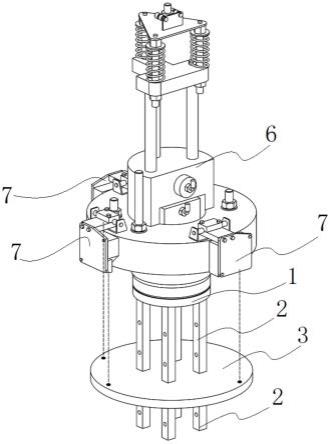
28.使用时,当需要调整物流站机械臂传感器(7)位置时,工作人员只需将本实用新型上圆盘(1)顶部的三个定位销(12)对准插入原有结构的机械臂的定位孔内,依靠上圆盘(1)顶部的四个固定限位件(11)采用磁吸方式安装固定,确保本实用新型与机械臂相对位置固定。然后,工作人员根据实际工作需要,调整下圆盘(3)连接可调连接杆(2)的可调安装孔(22)位置,通过移动至不同可调安装孔(22)处,实现5cm、10cm、15cm和20cm四种距离,便于标定不同需求的传感器模式。调整完成后,若传感器模式不变,则后期使用无需调整下圆盘(3)位置。最后,如图15所示,工作人员调整物流站机械臂传感器(7)位置,直至物流站机械臂传感器(7)发射光束与下圆盘(3)预先做好的标记点对齐时,则为传感器(7)正确工作位置,从而实现了传感器(7)在物流站机械臂(6)上的辅助定位。
29.最后,随着时间的推移,当使用过程中发生部件损坏或者是需要拆除时,只需将本实用新型进行拆除,拆除时,由于本实用新型采用磁吸方式安装固定,因此,只需向下用力拔下即可。因此,本技术使用简便简易,使用时,本实用新型只需在底部圆盘上根据机械臂工艺技术要求设置标记点,当调整传感器安装位置,当激光束与标记点对齐时,则为传感器正确工作位置。
30.本实用新型与现有技术相比所产生的有益效果是:
31.1、本实用新型构造简易、设计新颖合理,提高了定位机械臂传感器的效率和准确度,避免出现机械臂定位不准无法抓取或碰撞辅料的情况;解决了传统的调整传感器位置全凭感觉和经验,人工定位方式复杂繁琐,可靠性差。且定期维护难度大,耗费较多时间调整后,效果依旧不明显的技术难题;
32.2、本实用新型由于设置有三颗定位销,保证了定位辅助装置与机械臂相对位置固定、定位精准方便,可靠性较强;
33.3、本实用新型由于增设四块固定限位件安装在顶部圆盘,通过固定限位件吸附固定定位辅助装置,实现无损安装方式,改变传统螺丝固定的方式,避免对机械臂钻孔损伤。磁吸方式安装固定,可实现快速安装拆卸,有效缩短安装和拆卸时间,提高定位调整效率;
34.4、本实用新型增设四根连接杆固定顶部圆盘和底部圆盘相对位置,且底部圆盘可以在连接杆上轴向移动。通过在连接杆上固定位置开设四组螺丝孔用于固定底部圆盘,四组固定位置分别对应顶、底部圆盘距离5cm、10cm、15cm和20cm,便于标定不同需求的传感器模式;
35.5、本实用新型的底部圆盘上根据机械臂工艺技术要求设置标记点,当调整传感器安装位置,当激光束与标记点对齐时,则为传感器正确工作位置;
36.6、本实用新型的外部上涂防锈层,因此可以防止生锈的同时也延长了整个辅助装置的使用寿命,实现环保的同时也节省了资源,同时,在辅助装置的外部涂有可以自发光的荧光材料,可以在夜间或者黑暗室内以及地下施工环境清楚地标示该辅助装置的位置,能有效地起到安全提示的作用,提高醒目度,易于人们辨别,增加施工和生活中的安全性。
附图说明
37.下面结合附图对本实用新型的具体实施方式作进一步详细的说明,其中:
38.图1是本实用新型的整体组合结构示意图之一;
39.图2是本实用新型的整体组合结构示意图之二;
40.图3是本实用新型的整体组合结构示意图之三;
41.图4是本实用新型的整体组合结构示意图之四;
42.图5是本实用新型的整体组合结构示意图之五;
43.图6是本实用新型的整体分解结构示意图之一;
44.图7是本实用新型的整体分解结构示意图之二;
45.图8是本实用新型的上圆盘(1)部件的整体结构示意图之一;
46.图9是本实用新型的上圆盘(1)部件的整体结构示意图之二;
47.图10是本实用新型的上圆盘(1)部件的整体结构示意图之三;
48.图11是本实用新型的下圆盘(3)部件的整体结构示意图之一;
49.图12是本实用新型的下圆盘(3)部件的整体结构示意图之二;
50.图13是本实用新型的下圆盘(3)部件的整体结构示意图之三;
51.图14是本实用新型的可调连接杆(2)部件的整体结构示意图;
52.图15是本实用新型的使用状态示意图;
53.其中,图中标号:1—上圆盘,11—固定限位件,12—定位销,13—安装凹槽,14—定位销槽,15—固定螺丝孔;
54.2—可调连接杆,21—盲孔,22—可调安装孔;
55.3—下圆盘,31—限位安装孔,311—限位件,3111—限位孔;
56.4—紧固组件;
57.5—螺丝钉
58.6—物流站机械臂;
59.7—传感器。
具体实施方式
60.为了使本实用新型实现的技术手段、创造特征、达成目的与功效易于明白了解,下面结合附图以及具体实施方式对本实用新型的技术方案作更进一步详细的说明,需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
61.如说明书附图所示的一种用于物流站机械臂传感器定位辅助装置,包括:上圆盘1;
62.多个固定限位件11,固定限位件11设置于上圆盘1上;
63.多个定位销12,定位销12连接于圆盘1上;
64.若干根可调连接杆2,各可调连接杆2一端连接上圆盘1,各可调连接杆2另一端连接下圆盘3;
65.下圆盘3,下圆盘3穿套于可调连接杆2上,且下圆盘3在可调连接杆2上上下来回移动调整距离,端部通过紧固组件4紧固为一整体。
66.在本实用新型中,紧固组件4包括螺栓和螺母,螺母旋紧安装于螺栓的端部起到紧固限位作用,其中,螺栓为六角螺栓或者是平头螺栓,螺母为六角螺母或者是平头螺母。
67.进一步的,上圆盘1的顶端端面分别开设有多个安装凹槽13和定位销槽14以及贯
通正反面的固定螺丝孔15。
68.进一步的,固定限位件11为强力圆形磁铁,该强力圆形磁铁镶嵌于安装凹槽13内与上圆盘1连为一整体。
69.进一步的,定位销12固定插设于定位销槽14内与上圆盘1连为一整体。
70.进一步的,可调连接杆2整体为方形柱状体构件,在该方形柱状体构件的顶部开设有盲孔21,螺丝钉从上至下依序穿过固定螺丝孔15和该盲孔21后将可调连接杆2与上圆盘1可拆卸连为一整体。
71.在本实用新型中,盲孔21为螺栓孔。
72.进一步的,可调连接杆2上等距或是不等距开设有若干个贯通正反面的可调安装孔22,可调安装孔22沿可调连接杆2的长度方向开设。
73.进一步的,下圆盘3上开设有多个贯通正反面的限位安装孔31,限位安装孔31处对称延伸设有限位件311,各限位件311上开设有贯通正反面的限位孔3111。
74.进一步的,下圆盘3通过限位安装孔31穿套于可调连接杆2上,螺栓穿过限位孔3111和可调安装孔22将下圆盘3与可调连接杆2可拆卸连为一整体,且端部通过紧固螺母紧固。
75.具体的,限位孔3111和所述可调安装孔22均为螺栓孔。
76.进一步的,在上圆盘1、可调连接杆2和下圆盘3以及紧固组件4的外表面上均从内至外依序设置有注塑层、防锈层和防水层以及警示层,警示层上涂有荧光粉。
77.在本实用新型中,在注塑层上注塑有高分子耐磨材料;防锈层包括环氧富锌底漆和氯化橡胶面漆以及位于环氧富锌底漆和氯化橡胶面漆之间的环氧云铁中间漆;防水层为聚氨酯防水涂料;警示层为单一颜色或多种颜色相互混搭的反光警示带或反光色膜或反光漆。
78.在本实用新型中,所指的连接均为固定连接或者是活动连接,其中,固定连接为焊接连接或者是直接加工为一体成型结构;活动连接为铰接连接、螺纹连接、卡口连接、插拔连接。
79.综上所述,本实用新型更为具体的实施方式是:
80.上述设计结构的一种用于物流站机械臂传感器定位辅助装置在进行使用之前,需要将其已经制作完成的该一种定位辅助装置加以安装作为备用。
81.具体的制作步骤是:上圆盘1分别在顶部上侧、左侧、右侧开设三个定位销槽14用于安装定位销12,上圆盘1在顶部开设四个安装凹槽13用于安装固定限位件11,上圆盘1开设四个固定螺丝孔15用于连接可调连接杆2。
82.制作4根相同的可调连接杆2,在距离顶端5cm、10cm、15cm和20cm处,开设四个可调安装孔22。可调连接杆2顶端开设螺丝孔,使用螺丝钉5用于连接固定上圆盘1的四个固定螺丝孔15。
83.下圆盘3上开设四个限位安装孔31用于连接可调连接杆2,下圆盘3在底部限位安装孔31处焊接限位件311,在限位件311开设限位孔3111用于连接固定可调连接杆2。下圆盘3设置三个传感器光束标记点。
84.具体的安装步骤是:首先,工作人员只需将本实用新型的定位销12固定安装于上圆盘1顶部的三个定位销槽14内。然后,将固定限位件11固定安装于上圆盘1顶部的四个安
装凹槽13内。紧接着,将四根可调连接杆2顶端对齐上圆盘1的四个固定螺丝孔15,使用螺丝钉5用于连接固定上圆盘1。然后,将固定住上圆盘1的四根可调连接杆2插入下圆盘3的四个限位安装孔31,最后,调整下圆盘3至合适的工作位置的可调安装孔22处,用紧固组件4连接限位件311紧固位置,从而完成本实用新型的安装,安装完成后即可进行使用。
85.使用时,当需要调整物流站机械臂传感器7位置时,工作人员只需将本实用新型上圆盘1顶部的三个定位销12对准插入原有结构的机械臂的定位孔内,依靠上圆盘1顶部的四个固定限位件11采用磁吸方式安装固定,确保本实用新型与机械臂相对位置固定。然后,工作人员根据实际工作需要,调整下圆盘3连接可调连接杆2的可调安装孔22位置,通过移动至不同可调安装孔22处,实现5cm、10cm、15cm和20cm四种距离,便于标定不同需求的传感器模式。调整完成后,若传感器模式不变,则后期使用无需调整下圆盘3位置。最后,工作人员调整物流站机械臂传感器7位置,直至物流站机械臂传感器7发射光束与下圆盘3预先做好的标记点对齐时,则为传感器7正确工作位置,从而实现了传感器7在物流站机械臂6上的辅助定位。
86.最后,随着时间的推移,当使用过程中发生部件损坏或者是需要拆除时,只需将本实用新型进行拆除,拆除时,由于本实用新型采用磁吸方式安装固定,因此,只需向下用力拔下即可。因此,本技术使用简便简易,使用时,本实用新型只需在底部圆盘上根据机械臂工艺技术要求设置标记点,当调整传感器安装位置,当激光束与标记点对齐时,则为传感器正确工作位置。
87.最后,需要说明的是,以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例。但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。