1.本发明涉及了车辆防撞技术领域的一种车辆安全控制系统,具体涉及一种基于角雷达和环视摄像头的车辆侧向防撞安全系统。
背景技术:
2.在诸多交通事故中,常有因车辆侧面防护不到位而导致车辆直接被挤压变形的例子。目前私家车的前后位置都已具有较好的防撞措施,例如安全气囊、车身的保险杠、自动避障等手段。但这些安全措施都有各种各样的因素导致无法同样安装到车辆侧面。
技术实现要素:
3.为了解决背景技术中存在的问题,本发明所提供的一种基于角雷达和环视摄像头的车辆侧向防撞安全系统,能够检测其他车辆与本车发生侧向碰撞的可能性,并自动进行防护措施,提高了车辆在被侧方向撞击情况下的安全性。
4.本发明主要针对本车与其他车辆在侧方向发生撞击的情况下,因驾驶员无意识或无法有效避撞的场景。该车辆侧向防撞安全系统能够自动利用角雷达和环视摄像头监测周边环境,通过分析角雷达反馈数据和图像信息来得出是否有危险车辆接近本车,并自动控制防撞安全装置做出反应以应对将会发生的碰撞事故,提高车辆的防撞能力。
5.本发明采用的技术方案是:
6.包括角雷达,布置在本车的角上,用于检测本车侧向障碍物并将检测数据上传至主控系统;
7.包括环视摄像头,布置在本车的侧部上,用于检测本车侧向是否有车辆驶向本车的图像并将图像数据上传至主控系统;
8.包括主控系统,分别连接角雷达和环视摄像头,接收角雷达和环视摄像头上传的数据进行处理产生控制信号并发送到防撞安全装置;
9.包括防撞安全装置,和主控系统连接,接收来自主控系统的控制信号选择进行防撞击动作。
10.所述的主控系统根据角雷达和环视摄像头上传的数据进行分析周边是否有障碍物靠近以及是否会与本车发生碰撞,若判断到会发生碰撞则产生用于控制防撞安全装置进入紧急状态的紧急控制信号发送到防撞安全装置;
11.所述的防撞安全装置接收到紧急控制信号,在当前紧急状态下迅速弹出动作以抵御侧向车辆的撞击。
12.所述的角雷达数量为四个,分别安装在车辆的四个角处。
13.所述的环视摄像头数量为两个,分别安装在车辆的两侧后视镜处。
14.所述的防撞安全装置整体安装在车辆底盘下,主要由防撞杆、滑轨、驱动模块组成:
15.驱动模块固定于车辆底盘,连接到主控系统;
16.多根弧形的滑轨,多根滑轨平行布置,且和驱动模块可调节活动地连接;
17.防撞杆固定在多根滑轨的末端,长度大于车门的宽度。
18.所述的驱动模块包括电机和齿轮,电机固定在车辆底盘并连接到主控系统,电机的输出轴和齿轮同轴连接,每根滑轨沿弧形表面设置齿条,齿条和齿轮啮合。
19.所述的防撞杆由刚性材料制成。
20.所述的滑轨具有一定的弧度,该弧度根据不同车型需设置不同的参数,需要在收起状态时不影响车辆的正常使用,且在弹出、收回时不会与车辆本身发生明显的擦碰。
21.本发明防撞安全系统安装在车辆的底部,由安装于车辆四周的角雷达和环视摄像头监控周边车辆情况,由主控系统整理监测信息并控制防撞安全系统的状态。当处于平常状态时,防撞安全系统被收纳于车辆底部。当进入触发状态时,电机开启,由驱动滑轨带动弧形滑轨将防撞杆推动到车辆侧面,以此保护车辆免遭侧向碰撞的危险。本发明主要针对本车与其他车辆在侧方向发生撞击的情况下,因驾驶员无意识或无法有效避撞的场景。
22.本发明的有益效果是:
23.本发明系统能够自动利用角雷达和环视摄像头监测周边环境,通过分析角雷达反馈数据和图像信息来得出是否有危险车辆接近本车,并自动控制防撞安全装置做出反应以应对将会发生的碰撞事故,提高车辆的防撞能力。
24.本发明能够帮助驾驶员在危险到来时因无意识情况或因无法有效避让时,通过自动控制车辆侧向防撞安全系统来迅速的形成对危险撞击的防御措施。该发明可以有效的帮助驾驶员避免许多车辆侧向防御手段不佳而引发的交通事故,提高公共道路上行车和驻车的安全。
附图说明
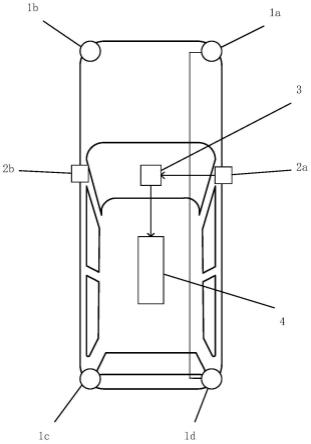
25.图1为本发明车辆侧向防撞安全系统的结构图;
26.图中:1a、1b、1c、1d角雷达,2a、2b环视摄像头,3、主控系统,4、防撞安全装置。
27.图2为本发明车辆侧向防撞安全系统平常状态的底部视图;
28.图中:5、防撞杆,6、滑轨,7、驱动滑轨。
29.图3为本发明车辆侧向防撞安全系统的紧急状态的后方视图;
30.图中:5、防撞杆,6、滑轨。
具体实施方式
31.下面结合附图及具体实施例对本发明作进一步详细说明。
32.如图1所示,系统包括:
33.包括角雷达,布置在本车的角上,用于检测本车侧向障碍物并将检测数据上传至主控系统3;
34.包括环视摄像头,布置在本车的侧部上,用于检测本车侧向是否有车辆驶向本车的图像并将图像数据上传至主控系统3;
35.包括主控系统3,分别连接角雷达和环视摄像头,接收角雷达和环视摄像头上传的数据进行处理产生控制信号并发送到防撞安全装置4;
36.包括防撞安全装置4,和主控系统3连接,接收来自主控系统3的控制信号选择进行
防撞击动作。
37.主控系统3根据角雷达和环视摄像头上传的数据进行分析周边是否有障碍物靠近以及是否会与本车发生碰撞,若判断到会发生碰撞则产生用于控制防撞安全装置4进入紧急状态的紧急控制信号发送到防撞安全装置4;
38.防撞安全装置4接收到紧急控制信号,在当前紧急状态下迅速弹出动作以抵御侧向车辆的撞击。
39.具体实施中,角雷达数量为四个,分别安装在车辆的四个角处,如图1所示分别为四个角雷达a、1b、1c、1d。
40.具体实施中,环视摄像头数量为两个,分别安装在车辆的两侧后视镜处,如图1所示分别为两个环视摄像头a、2b。
41.由此,车辆侧向防撞安全系统的结构如图1所示,四个角雷达分别安装在车辆的四个角落处,角雷达能够检测较远处的车辆信息,两侧后视镜处各有一环视摄像头,能够识别周边车辆的情况。主控系统接收各传感器的数据信息,以此判断是否有车辆将与本车发生碰撞,若主控系统判断具有碰撞风险,则控制防撞安全装置进入触发状态。
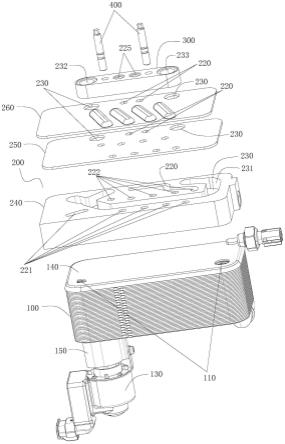
42.如图2和图3所示,防撞安全装置整体安装在车辆底盘下,成左右对称状,主要由防撞杆5、滑轨6、驱动模块7组成,
43.防撞安全装置的平常状态如图2所示,整套防撞安全装置收纳在车辆底部,主要由三部分组成。
44.驱动模块7固定于车辆底盘,连接到主控系统3;
45.多根弧形的滑轨6,滑轨6的弧形凹面朝向本车车体,多根滑轨6平行布置,且和驱动模块7可调节活动地连接;
46.防撞杆5固定在多根滑轨6的末端,长度大于车门的宽度。
47.驱动模块7包括电机和齿轮,电机固定在车辆底盘并连接到主控系统3,电机的输出轴和齿轮同轴连接,每根滑轨6沿弧形表面设置也是弧形的齿条,齿条和齿轮啮合,同时可以将滑轨6设置在一个同样弧形的导轨支架上进行支撑。
48.这样使得防撞安全装置由电机驱动,电机由连接到主控系统3控制,在进入触发状态后开启,通过齿轮齿条副带动多根滑轨6和防撞杆5整体上升运动,将防撞杆5推动到车辆车门的外侧方。
49.防撞杆5由刚性材料制成,在收到撞击时横置于车辆车门侧方,保护遭到撞击的车辆,通过防撞杆的防护能先吸收撞击动能,且只能使得车门整体受压,防止车门被挤压变形。
50.该车辆侧向防撞安全系统的触发状态如图3所示,两侧的滑轨和防撞杆共同构成一个包围圈,将车辆本体保护在整套系统中间,以此达成车辆侧向的防撞保护功能。当确认周边已无危险因素后,可通过驾驶员自我判断后反向启动驱动多根滑轨6和防撞杆5整体下降运动,回收防撞安全装置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。