1.本公开涉及车辆操舵控制装置。
背景技术:
2.已知有对车辆的驾驶员的方向盘操作施加反作用力的车辆操舵控制装置。该车辆操舵控制装置在驾驶员正在使车辆沿着弯路行驶时以使得驾驶员的方向盘操作量止于适当的范围的方式调整施加于方向盘操作的反作用力(例如,参照日本特开2019-209844)。
技术实现要素:
3.驾驶员在使车辆沿着弯路行驶的情况下对方向盘向右旋转或向左旋转地进行旋转操作。驾驶员在使车辆沿着急弯路行驶的情况下,与使车辆沿着缓弯路行驶的情况相比,需要对方向盘快速地进行旋转操作。此处,若在使车辆沿着急弯路行驶时和使车辆沿着缓弯路行驶时变更对方向盘操作施加的反作用力的定时恒定,则在使车辆沿着急弯路行驶时方向盘操作延迟。因此,有可能无法实现车辆沿着弯路的顺畅的行驶。
4.本公开提供能够以使得驾驶员能够使车辆沿着弯路顺畅地行驶的方式对变更对方向盘操作施加的反作用力的定时进行调整的车辆操舵控制装置。
5.本公开的第1的方案的车辆操舵控制装置具备控制装置。所述控制装置构成为,控制对由本车辆的驾驶员进行的操舵操作施加的操舵反作用力。所述控制装置构成为,取得所述本车辆的行驶方向前方的弯路的信息。所述控制装置构成为,基于所述弯路的信息设定引导操舵操作量。所述控制装置构成为,预测所述驾驶员开始用于使所述本车辆沿着该弯路行驶的实际的操舵操作的时刻作为操舵操作开始时刻。所述控制装置构成为,基于所述操舵操作的实际的量与所述引导操舵操作量之差,在比所述操舵操作开始时刻提前预定时间的时间点设定所述操舵反作用力。
6.若在成为了驾驶员开始用于使本车辆沿着弯路行驶的操舵操作的时刻(操舵操作开始时刻)时减小操舵反作用力,则驾驶员容易进行用于使本车辆沿着弯路行驶的操舵操作。然而,有可能该操舵操作延迟而无法使本车辆沿着弯路适当地行驶。根据本公开,在比操舵操作开始时刻更早的定时减小操舵反作用力。因此,即使在弯路的弯曲程度大的情况下,也能够使得用于使本车辆沿着弯路行驶的操舵操作不延迟地进行。其结果,能够使本车辆沿着弯路适当地行驶。
7.在本公开的第1方案的车辆操舵控制装置中,所述控制装置可以构成为,在所述弯路的弯曲程度大时,与所述弯路的弯曲程度小时相比,将所述预定时间设定为更长的时间。
8.在弯路的弯曲程度大的情况下,驾驶员为了使本车辆沿着该弯路行驶而需要更大幅地进行操舵操作,因此,驾驶员的操舵操作延迟的可能性变高。根据本公开,在弯路的弯曲程度大时,预定时间被设定为长的时间。因此,在比驾驶员开始用于使本车辆沿着该弯路行驶的操舵操作的时间点更早的定时减小操舵反作用力。因此,能够抑制驾驶员的操舵操作延迟。
9.在本公开的第1方案的车辆操舵控制装置中,所述控制装置可以构成为,在所述本车辆的行驶速度高时,与所述本车辆的行驶速度低时相比,将所述预定时间设定为更长的时间。
10.在本车辆的行驶速度高的情况下,驾驶员为了使本车辆沿着弯路行驶而需要更快地进行操舵操作。因此,驾驶员的操舵操作延迟的可能性变高。根据本公开,在本车辆的行驶速度高时,预定时间被设定为长的时间。因此,在比驾驶员开始用于使本车辆沿着该弯路行驶的操舵操作的时间点更早的定时减小操舵反作用力。因此,能够抑制驾驶员的操舵操作延迟。
11.在本公开的第1方案的车辆操舵控制装置中,所述控制装置可以构成为,设定使所述本车辆沿着所述弯路行驶时的所述操舵操作的量的变化的目标。所述控制装置可以构成为,将所述引导操舵操作量的最大值限制为比沿着所述目标变化的所述操舵操作的量的最大值小预定值的值。
12.驾驶员在使本车辆沿着弯路行驶的情况下,在增大操舵操作的量之后,减小操舵操作的量。此时,若操舵操作的量接近由目标规定的操舵操作的量(目标操舵操作量)的最大值,则有时会超过该最大值地变大。根据本公开,引导操舵操作量的最大值被限制为比目标操舵操作量的最大值小预定值的值。因此,在操舵操作的量接近了目标操舵操作量的最大值时,增大操舵反作用力。因此,能够抑制驾驶员的操舵操作超过目标操舵操作量的最大值地变大。
13.在本公开的第1方案的车辆操舵控制装置中,所述控制装置可以构成为,在所述本车辆的行驶速度低时,与所述本车辆的行驶速度高时相比,将所述预定值设定为更小的值。
14.在本车辆的行驶速度高的情况下,处于操舵操作的速度变大的倾向。因此,驾驶员有可能为了使本车辆沿着弯路行驶而过度增大操舵量。根据本公开,在本车辆的行驶速度高时,用于使引导操舵操作量的最大值比目标操舵操作量的最大值小的预定值被设定为小的值。因此,在本车辆的行驶速度高的状态下操舵操作的量接近了目标操舵操作量的最大值时,增大操舵反作用力的程度变小。因此,能够适当地抑制驾驶员的操舵操作超过目标操舵操作量的最大值地变大。
15.在本公开的第1方案的车辆操舵控制装置中,所述控制装置可以构成为,在所述弯路的弯曲程度大时,与所述弯路的弯曲程度小时相比,将所述预定值设定为更大的值。
16.在弯路的弯曲程度大的情况下,驾驶员为了使本车辆沿着该弯路行驶而需要更大幅地进行操舵操作。因此,操舵操作的量超过由目标规定的操舵操作的量(目标操舵操作量)的最大值地变大的可能性变高。根据本公开,在弯路的弯曲程度大时,用于使引导操舵操作量的最大值比目标操舵操作量的最大值小的预定值被设定为大的值。因此,在弯路的弯曲程度大的情况下操舵操作的量接近了目标操舵操作量的最大值时,增大操舵反作用力的程度变大。因此,能够适当地抑制驾驶员的操舵操作超过目标操舵操作量的最大值地变大。
17.本公开的第2方案的车辆操舵控制装置具备控制装置。所述控制装置构成为,控制对由本车辆的驾驶员进行的操舵操作施加的操舵反作用力。所述控制装置构成为,在所述弯路的弯曲程度大时,与所述弯路的弯曲程度小时相比,将对使所述本车辆沿着弯路行驶时的所述操舵操作施加的所述操舵反作用力设定得更小。
18.在弯路的弯曲程度大的情况下,与弯路的弯曲程度小的情况相比,驾驶员为了使本车辆沿着该弯路适当地行驶而需要大幅地进行操舵操作。因此,在弯路的弯曲程度大的情况下,有可能用于使本车辆沿着弯路行驶的驾驶员的操舵操作延迟。在该情况下,有可能无法使本车辆沿着弯路适当地行驶。根据本公开,在弯路的弯曲程度大的情况下,与弯路的弯曲程度小的情况相比,减小操舵反作用力。因此,即使在弯路的弯曲程度大的情况下,也能够使得用于使本车辆沿着弯路行驶的操舵操作能够不延迟地进行。
19.在本公开的第2方案的车辆操舵控制装置中,所述弯路的弯曲程度可以是该弯路的最小曲线半径。所述控制装置构成为,在所述弯路的最小曲线半径小时,与所述弯路的最小曲线半径大时相比,取得在前方距所述本车辆更远的地点的所述弯路的曲线半径。所述控制装置构成为,在所述取得的曲线半径小时,与所述取得的曲线半径大时相比,将所述操舵反作用力设定得更小。
20.在弯路的弯曲程度大的情况下,用于使本车辆沿着弯路行驶的驾驶员的操舵操作妨碍操舵反作用力,存在延迟的可能性。在该情况下,无法使本车辆沿着弯路适当地行驶的可能性变高。
21.根据本公开,减小操舵反作用力。而且,在该曲线半径小时,与曲线半径大时相比,使操舵反作用力更小。因此,即使在弯路的弯曲程度大的情况下,也能够使得用于使本车辆沿着弯路行驶的操舵操作不延迟地进行。其结果,能够使本车辆沿着弯路适当地行驶。
22.本公开的构成要素不限定于参照附图而在后叙述的本公开的实施方式。本公开的其他的目的、其他的特征及附带的优点将根据关于本公开的实施方式的说明而容易理解。
附图说明
23.以下将参照附图来说明本发明的示例性实施方式的特征、优点、以及技术上和工业上的意义,在这些附图中,同样的附图标记表示同样的要素,并且其中:
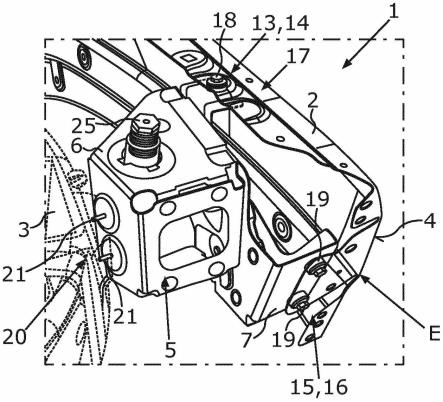
24.图1是示出本发明的实施方式的车辆操舵控制装置及搭载有该车辆操舵控制装置的车辆(本车辆)的图。
25.图2a是示出本车辆进入缓弯路的场景的图。
26.图2b是示出本车辆进入急弯路的场景的图。
27.图3是示出根据本车辆的行驶速度(本车速)和弯路半径而判定的紧迫度的有无的图。
28.图4a是示出本车辆进入缓弯路的场景中的引导操舵角与实际的操舵角的关系的图。
29.图4b是示出本车辆进入急弯路的场景中的引导操舵角与实际的操舵角的关系的图。
30.图5是示出本发明的实施方式的车辆操舵控制装置所执行的例程的流程图。
31.图6a是示出在弯路半径大并且本车速低时所设定的引导操舵角的变化及目标操舵角的变化的图。
32.图6b是示出在弯路半径小并且本车速高时所设定的引导操舵角的变化及目标操舵角的变化的图。
33.图7是示出本发明的实施方式的变形例的车辆操舵控制装置所执行的例程的流程
图。
具体实施方式
34.以下,参照附图对本公开的实施方式的车辆操舵控制装置进行说明。如图1所示,本公开的实施方式的车辆操舵控制装置10搭载于本车辆100。在以下的说明中,将本车辆100的驾驶员表示为“驾驶员dr”。
35.ecu
36.车辆操舵控制装置10具备电子控制单元(ecu)90。ecu90具备微型计算机作为主要部分。微型计算机包括cpu、rom、ram、非易失性存储器及接口(interface)等。cpu通过执行被保存于rom的指令或程序或例程来实现各种功能。
37.行驶装置
38.另外,本车辆100具备行驶装置20。行驶装置20包括驱动装置21、制动装置22及操舵装置23。
39.驱动装置
40.驱动装置21输出为了使本车辆100行驶而施加于本车辆100的驱动转矩(驱动力)。驱动装置21例如是内燃机及马达等。驱动装置21与ecu90电连接。ecu90能够通过控制驱动装置21的工作来控制从驱动装置21输出的驱动转矩。
41.制动装置
42.制动装置22输出为了对本车辆100进行制动而施加于本车辆100的制动转矩(制动力)。制动装置22例如是制动器装置。制动装置22与ecu90电连接。ecu90能够通过控制制动装置22的工作来控制从制动装置22输出的制动转矩。
43.操舵装置
44.操舵装置23对本车辆100进行操舵。操舵装置23在本例中具备动力转向装置231及反作用力致动器232。动力转向装置231输出用于对本车辆100进行操舵的操舵转矩(操舵力)。反作用力致动器232在对方向盘35进行旋转操作的力被施加于方向盘35时对该方向盘操作施加反作用力(操舵反作用力)。动力转向装置231及反作用力致动器232与ecu90电连接。ecu90能够通过控制动力转向装置231的工作来控制从动力转向装置231输出的操舵转矩。ecu90能够通过控制反作用力致动器232的工作来控制操舵反作用力。
45.传感器等
46.而且,本车辆100具备加速器踏板31、加速器踏板操作量传感器32、制动器踏板33、制动器踏板操作量传感器34、方向盘35、转向轴36、操舵角传感器37、操舵转矩传感器38、车速检测装置51、周边信息检测装置60及道路信息检测装置70。
47.加速器踏板操作量传感器
48.加速器踏板操作量传感器32检测加速器踏板31的操作量。加速器踏板操作量传感器32与ecu90电连接。加速器踏板操作量传感器32将检测到的加速器踏板31的操作量的信息向ecu90发送。ecu90基于该信息取得加速器踏板31的操作量作为加速器踏板操作量ap。ecu90基于加速器踏板操作量ap及后述的本车速v(本车辆100的行驶速度)取得要求驱动转矩(要求驱动力)。ecu90以使得该要求驱动转矩从驱动装置21输出的方式控制驱动装置21的工作。
49.制动器踏板操作量传感器
50.制动器踏板操作量传感器34检测制动器踏板33的操作量。制动器踏板操作量传感器34与ecu90电连接。制动器踏板操作量传感器34将检测到的制动器踏板33的操作量的信息向ecu90发送。ecu90基于该信息取得制动器踏板33的操作量作为制动器踏板操作量bp。ecu90基于制动器踏板操作量bp取得要求制动转矩(要求制动力)。ecu90以使得该要求制动力从制动装置22输出的方式控制制动装置22的工作。
51.操舵角传感器
52.操舵角传感器37检测相对于中立位置的转向轴36的旋转角度。操舵角传感器37与ecu90电连接。操舵角传感器37将检测到的转向轴36的旋转角度的信息向ecu90发送。ecu90基于该信息取得转向轴36的旋转角度作为操舵角θ。
53.操舵转矩传感器
54.操舵转矩传感器38检测驾驶员dr经由方向盘35输入到转向轴36的转矩。操舵转矩传感器38与ecu90电连接。操舵转矩传感器38将检测到的转矩的信息向ecu90发送。ecu90基于该信息取得驾驶员dr经由方向盘35输入到转向轴36的转矩(驾驶员输入转矩)。ecu90基于操舵角θ、驾驶员输入转矩及本车速v(本车辆100的行驶速度)取得要求操舵转矩。ecu90以使得该要求操舵转矩从操舵装置23输出的方式控制操舵装置23的工作。
55.车速检测装置
56.车速检测装置51检测本车辆100的车速(本车速v)。车速检测装置51例如是车轮速传感器。车速检测装置51与ecu90电连接。车速检测装置51将检测到的本车辆100的车速的信息向ecu90发送。ecu90基于该信息取得本车速v。
57.周边信息检测装置
58.周边信息检测装置60检测本车辆100的周边的信息。周边信息检测装置60在本例中具备电波传感器61及图像传感器62。电波传感器61例如是雷达传感器(毫米波雷达等)。图像传感器62例如是相机。此外,周边信息检测装置60也可以具备超声波传感器(间隙声呐)等声波传感器、激光雷达(lidar)等光传感器。
59.电波传感器
60.电波传感器61与ecu90电连接。电波传感器61发送电波,并且接收由物体反射的电波(反射波)。电波传感器61将与发送出的电波及接收到的电波(反射波)有关的信息(检知结果)向ecu90发送。换言之,电波传感器61检知存在于本车辆100的周边的物体,并将与该检知到的物体有关的信息(检知结果)向ecu90发送。ecu90能够基于该信息(电波信息)取得与存在于本车辆100的周边的物体有关的信息(周边检测信息is)。此外,在本例中,物体是车辆、机动二轮车、自行车及人等。
61.图像传感器
62.图像传感器62也与ecu90电连接。图像传感器62拍摄本车辆100的周边,并将与拍摄到的图像有关的信息向ecu90发送。ecu90能够基于该信息(相机图像信息ic)取得与本车辆100的周边有关的信息(周边检测信息is)。
63.道路信息检测装置
64.道路信息检测装置70包括gps装置71及地图信息数据库72。
65.gps装置
66.gps装置71接收所谓的gps信号。gps装置71与ecu90电连接。gps装置71将接收到的gps信号向ecu90发送。ecu90经由gps装置71取得gps信号。ecu90能够基于所取得的gps信号取得本车辆100的当前位置p100。
67.地图信息数据库
68.地图信息数据库72存储包括“与限制速度有关的信息”及“与道路的类别有关的信息”等的地图信息。地图信息数据库72与ecu90电连接。ecu90能够从本车辆100的当前位置p100取得与本车辆100当前正在行驶的道路有关的信息(道路信息ir)。
69.车辆操舵控制装置的工作的概要
70.接着,对车辆操舵控制装置10的工作的概要进行说明。
71.驾驶员dr在使本车辆100沿着弯路行驶的情况下对方向盘35向右旋转或向左旋转地进行旋转操作。此时,驾驶员dr在使本车辆100沿着急弯路行驶的情况下,与使本车辆100沿着缓弯路行驶的情况相比,需要对方向盘35快速地进行旋转操作。此处,若在驾驶员dr使本车辆100沿着急弯路行驶时和驾驶员dr使本车辆100沿着缓弯路行驶时相对于方向盘操作从反作用力致动器232施加于方向盘35的反作用力(操舵反作用力)恒定,则有可能在驾驶员dr使本车辆100沿着急弯路行驶时方向盘操作延迟。也就是说,有可能驾驶员dr无法进行本车辆100沿着弯路的顺畅的行驶。
72.因此,车辆操舵控制装置10通过根据驾驶员dr欲使本车辆100行驶的弯路的曲率来对变更操舵反作用力的定时进行调整,从而驾驶员dr能够使本车辆100沿着弯路顺畅地行驶。
73.更具体而言,车辆操舵控制装置10在本车辆100的行驶中基于相机图像信息ic和/或道路信息ir判定是否预测到本车辆100将进入弯路。
74.车辆操舵控制装置10在车辆操舵控制装置10判定为预测到本车辆100将进入弯路的情况下,基于道路信息ir和/或相机图像信息ic取得或推定该弯路的最小曲线半径(弯路半径r)。在本例中,车辆操舵控制装置10在基于道路信息ir取得弯路半径r的情况下,对从gps信号确定的本车辆100的当前位置p100与保存于地图信息数据库72的地图信息进行对照。车辆操舵控制装置10确定本车辆100正在行驶的道路,从地图信息数据库72读出与该道路相关联地存储的弯路半径r。由此,车辆操舵控制装置10取得弯路半径r。另外,车辆操舵控制装置10在基于相机图像信息ic取得弯路半径r的情况下,通过推定从基于相机图像信息ic得到的本车辆100的前方的本车行驶道路rd的图像信息取得弯路半径r。
75.车辆操舵控制装置10在取得弯路半径r后,取得推定为以该弯路半径r的弯路为前方的驾驶员dr正在注视的、本车辆100的前方的地点处的本车行驶道路rd的曲率作为注视地点曲率ρ。此时,车辆操舵控制装置10在所取得的弯路半径r小的情况下,与该弯路半径r大的情况相比,取得在前方距本车辆100更远的地点处的本车行驶道路rd的曲率作为注视地点曲率ρ。
76.例如,如图2a所示,在弯路半径r大的情况下(即,在预测到本车辆100将进入的弯路是缓弯路的情况下),车辆操舵控制装置10取得距本车辆100为第1距离d1的前方的本车行驶道路rd的曲率作为注视地点曲率ρ。另一方面,如图2b所示,在弯路半径r小的情况下(即,在预测到本车辆100将进入的弯路是急弯路的情况下),车辆操舵控制装置10取得距本车辆100为第2距离d2的前方的本车行驶道路rd的曲率作为注视地点曲率ρ。第2距离d2比第
1距离d1长。这样,车辆操舵控制装置10在所取得的弯路半径r小的情况下,与所取得的弯路半径r大的情况相比,取得在前方距本车辆100更远的地点处的本车行驶道路rd的曲率作为注视地点曲率ρ。
77.车辆操舵控制装置10在取得注视地点曲率ρ后,以使得所取得的注视地点曲率ρ越大则越小的操舵反作用力对方向盘操作施加的方式控制反作用力致动器232的工作。
78.更具体而言,车辆操舵控制装置10如以下所说明那样通过运算取得由反作用力致动器232对方向盘操作施加的操舵反作用力的目标值(目标操舵反作用力ftgt)。然后,车辆操舵控制装置10以使得所取得的目标操舵反作用力ftgt施加于方向盘操作的方式控制反作用力致动器232的工作。
79.首先,车辆操舵控制装置10在取得弯路半径r后,基于该弯路半径r与此时的本车速v判定紧迫度的有无。本例中的紧迫度表示在驾驶员dr使本车辆100进入弯路时推定为驾驶员dr正在注视的、本车辆100的前方的地点(前方注视地点)。在判定为紧迫度大的情况下(即,在判定为有紧迫度的情况下),该紧迫度表示前方注视地点是在前方距本车辆100比较远的地点。在判定为紧迫度小的情况下(即,在判定为无紧迫度的情况下),该紧迫度表示前方注视地点是在前方距本车辆100比较近的地点。
80.如图3所示,车辆操舵控制装置10在本车速v处于比预定车速vth低的范围时,在弯路半径r比预定值(第1半径rth1)大的情况下,判定为无紧迫度。另一方面,车辆操舵控制装置10在本车速v处于比预定车速vth低的范围时,在弯路半径r为第1半径rth1以下的情况下,判定为有紧迫度。另外,车辆操舵控制装置10在本车速v处于预定车速vth以上的范围时,在弯路半径r比大于第1半径rth1的预定值(第2半径rth2)大的情况下,判定为无紧迫度。另一方面,车辆操舵控制装置10在本车速v处于预定车速vth以上的范围时弯路半径r为第2半径rth2以下的情况下,判定为有紧迫度。
81.此外,在此处说明的例子中,车辆操舵控制装置10基于本车速v和弯路半径r双方判定紧迫度的有无,但也可以构成为仅基于弯路半径r判定紧迫度的有无。
82.车辆操舵控制装置10在判定紧迫度的有无时,根据紧迫度的有无来推定驾驶员dr正在注视哪种程度的距离的前方的本车行驶道路rd的地点。即,车辆操舵控制装置10通过按照下式1所示的运算式的运算来取得从本车辆100到推定为驾驶员dr正在注视的地点(前方注视地点)的距离(前方注视距离d)。
83.d=v
×
t
…
(1)
84.在上式1中,“v”是本车速v。在上式1中,“t”是前方注视时间。
85.车辆操舵控制装置10在车辆操舵控制装置10判定为无紧迫度的情况下设定预定的时间(第1时间t1)作为前方注视时间t。车辆操舵控制装置10在车辆操舵控制装置10判定为有紧迫度的情况下设定预定的时间(第2时间t2)作为前方注视时间t。第2时间t2比第1时间t1长。因此,在判定为有紧迫度的情况下所取得的前方注视距离d是比在判定为无紧迫度的情况下所取得的前方注视距离d长的距离。
86.车辆操舵控制装置10在取得前方注视距离d后,使用相机图像信息ic和/或道路信息ir取得距本车辆100为前方注视距离d的前方的本车行驶道路rd的曲率(注视地点曲率ρ)。此时,如上所述,有紧迫度的情况的前方注视距离d是比无紧迫度的情况的前方注视距离d长的距离,因此在有紧迫度的情况下所取得的注视地点曲率ρ处于比在无紧迫度的情况
下所取得的注视地点曲率ρ大的倾向。
87.车辆操舵控制装置10在取得注视地点曲率ρ后,通过按照下式2所示的运算式的运算来取得引导操舵角θg。
88.θg=n
×k×
(1 a
×v2
)
×
l
×
ρ
…
(2)
89.在上式2中,“n”是转向箱的齿轮传动比。“k”是以使得利用上式2而取得的引导操舵角θg作为能够使本车辆100沿着弯路顺畅地行驶的值而取得的方式通过实验等而求出的系数(适合值)。“a”是所谓的稳定系数。“v”是本车速。“l”是本车辆100的轴距。
90.车辆操舵控制装置10在取得引导操舵角θg后,通过按照下式3所示的运算式的运算来取得该引导操舵角θg与该时间点的实际的操舵角θ之差(操舵角差δθ)。
91.δθ=θg-θ
…
(3)
92.车辆操舵控制装置10在取得操舵角差δθ后,该操舵角差δθ越大则将目标操舵反作用力ftgt设定为越小的值。车辆操舵控制装置10以使得所设定的目标操舵反作用力ftgt对方向盘操作施加的方式控制反作用力致动器232的工作。车辆操舵控制装置10也可以存储操舵角差δθ与目标操舵反作用力ftgt的对应的映射。在该情况下,在映射中,也可以是,操舵角差δθ越大,则目标操舵反作用力ftgt是越小的值。车辆操舵控制装置10也可以根据所取得的操舵角差δθ和映射来决定目标操舵反作用力ftgt。
93.效果
94.根据车辆操舵控制装置10,在预测到本车辆100将进入缓弯路的情况下,所取得的引导操舵角θg如图4a所示那样推移。在图4a中,线lg示出引导操舵角θg的推移,线la示出实际的操舵角θ的推移。在图4a中在时刻t40引导操舵角θg从零开始变大,在时刻t41实际的操舵角θ从零开始变大。也就是说,距本车辆100为前方注视距离d的前方的地点处的操舵角度即引导操舵角θg在比实际的操舵角θ早的定时开始变动。
95.另一方面,在预测到本车辆100将进入急弯路的情况下,所取得的引导操舵角θg如图4b所示那样推移。在图4b中,线lg示出引导操舵角θg的推移,线la示出实际的操舵角θ的推移。在图4b中,在时刻t40引导操舵角θg从零开始变大,在时刻t41实际的操舵角θ从零开始变大。
96.从对图4a所示的引导操舵角θg的推移与图4b所示的引导操舵角θg的推移进行比较可知,在预测为本车辆100将进入的弯路是急弯路时,与该弯路是缓弯路时相比,在更早的定时引导操舵角θg变大。更具体而言,在预测为本车辆100将进入的弯路是急弯路时,前方注视距离d(距离d2)被设定为比平缓的弯路时的前方注视距离d(距离d1)长(参照图2a、图2b)。因此,距本车辆100为距离d2的前方的地点处的操舵角度即引导操舵角θg在比距本车辆100为距离d1的前方的地点处的操舵角度即引导操舵角θg早的定时开始变动。因此,在预测为本车辆100将进入的弯路是急弯路时,与该弯路是缓弯路时相比,在更早的定时减小操舵反作用力f。因此,在本车辆100来到急弯路且驾驶员dr开始方向盘35的旋转操作时操舵反作用力f已经变小。因此,驾驶员dr能够对方向盘35快速地进行旋转操作。其结果,即使弯路是急弯路,驾驶员dr也能够使本车辆100沿着该弯路顺畅地行驶。因此,车辆操舵控制装置10能够对变更操舵反作用力的定时进行调整以使得驾驶员dr使本车辆100沿着弯路顺畅地行驶。
97.另外,在预测为本车辆100将进入的弯路是急弯路时,在本车辆100正在该弯路行
驶的期间,引导操舵角θg以先于实际的操舵角θ的变化的形式变大或变小。因此,即使弯路是急弯路,也能够使本车辆100沿着该弯路顺畅地行驶。
98.此外,在预测为本车辆100将进入的弯路是缓弯路时,在本车辆100正在该弯路行驶的期间,引导操舵角θg以接近实际的操舵角θ的变化的形式变大或变小。因此,进行接近驾驶员dr的实际的方向盘旋转操作的形式下的操舵反作用力的调整。
99.车辆操舵控制装置的具体工作
100.接着,对车辆操舵控制装置10的具体工作进行说明。车辆操舵控制装置10的ecu90的cpu以预定运算周期来执行图5所示的例程。因此,在成为预定的定时时,cpu从图5的步骤s500开始处理,并使该处理进入步骤s505。cpu在步骤s505中判定是否有紧迫度。
101.cpu在步骤s505中判定为“是”的情况下,cpu使处理进入步骤s510。在步骤s510中,cpu将前方注视时间t设定为第2时间t2。接着,cpu使处理进入步骤s515,使用在步骤s510中所设定的前方注视时间t通过按运算式1的运算来取得前方注视距离d。接着,cpu使处理进入步骤s520,使用在步骤s515中所取得的前方注视距离d而如先前所述那样取得注视地点曲率ρ。接着,cpu使处理进入步骤s525,使用在步骤s520中所取得的注视地点曲率ρ通过按照运算式2的运算来取得引导操舵角θg。接着,cpu使处理进入步骤s550,使用在步骤s525中所取得的引导操舵角θg通过按照运算式3的运算来取得操舵角差δθ。接着,cpu使处理进入步骤s555,使用在步骤s550中所取得的操舵角差δθ如先前所述那样取得目标操舵反作用力ftgt。接着,cpu使处理进入步骤s560,以达成在步骤s555中所取得的目标操舵反作用力ftgt的方式控制反作用力致动器232的工作。然后,cpu使处理进入步骤s595,暂且结束本例程。
102.另一方面,cpu在步骤s505中判定为“否”的情况下,cpu使处理进入步骤s530。在步骤s530中将前方注视时间t设定为第1时间t1。接着,cpu使处理进入步骤s535,使用在步骤s530中所设定的前方注视时间t通过按照运算式1的运算来取得前方注视距离d。接着,cpu使处理进入步骤s540,使用在步骤s535中所取得的前方注视距离d如先前所述那样取得注视地点曲率ρ。接着,cpu使处理进入步骤s545,使用在步骤s540中所取得的注视地点曲率ρ通过按照运算式2的运算来取得引导操舵角θg。接着,cpu使处理进入步骤s550,使用在步骤s545中所取得的引导操舵角θg通过按照运算式3的运算来取得操舵角差δθ。接着,cpu使处理进入步骤s555,使用在步骤s550中所取得的操舵角差δθ如先前所述那样取得目标操舵反作用力ftgt。接着,cpu使处理进入步骤s560,以达成在步骤s555中所取得的目标操舵反作用力ftgt的方式控制反作用力致动器232的工作。然后,cpu使处理进入步骤s595,暂且结束本例程。
103.以上是车辆操舵控制装置10的具体工作。
104.变形例
105.车辆操舵控制装置10也可以如以下那样构成:通过根据驾驶员dr欲使本车辆100行驶的弯路的曲率对变更操舵反作用力的定时进行调整,从而驾驶员dr能够使本车辆100沿着弯路顺畅地行驶。
106.即,本公开的实施方式的变形例的车辆操舵控制装置10在预测到本车辆100将进入弯路的情况下,设定用于使本车辆100沿着该弯路适当地行驶的操舵角的变化的模式来作为目标模式。车辆操舵控制装置10以在本车辆100沿着该弯路行驶时达成沿着目标模式
的操舵角θ的变化的方式设定用于引导驾驶员dr的方向盘操作的引导操舵角θg。车辆操舵控制装置10可以构成为,在实际的操舵角θ比引导操舵角θg小的情况下,减小操舵反作用力。另一方面,车辆操舵控制装置10可以构成为,在实际的操舵角θ比引导操舵角θg大的情况下,增大操舵反作用力。
107.特别是,在本例中,沿着目标模式的操舵角θ(目标操舵角θtgt)由下式4表示。在下式4中,“t”是为了使本车辆100沿着弯路行驶而驾驶员dr开始使方向盘35从中立位置旋转的时刻(方向盘操作开始时刻)。因此,在下式4中,“f(t)”是将方向盘操作开始时刻t设为变量的函数。驾驶员dr开始使方向盘35从中立位置旋转的时刻(方向盘操作开始时刻)也可以基于gps信号、地图信息、本车速而由车辆操舵控制装置10预测。方向盘操作开始时刻是“操舵操作开始时刻”的一例。
108.θtgt=f(t)
…
(4)
109.另外,在本例中,引导操舵角θg从下式5取得(设定)。在下式5中,“t”是方向盘操作开始时刻。“τ”是用于将开始引导操舵角θg的设定的时刻提前的时间(预测时间)。“a”是增益。
110.θg=a
×
f(t-τ)
…
(5)
111.另外,在本例中,预测时间τ基于弯路半径r及本车速v而设定。预测时间τ特别是从下式6取得。在下式6中,“r”是弯路半径。“v”是本车速。“h(r,v)”是将弯路半径r及本车速v设为变量的函数。
112.τ=h(r,v)
…
(6)
113.根据上式6,在弯路半径r小的情况下,与弯路半径r大的情况相比,取得更长的预测时间τ。也就是说,弯路半径r越小则取得越长的预测时间τ。另外,根据上式6,在弯路半径r比零大的情况下,取得比零长的预测时间τ。另外,根据上式6,在本车速v高的情况下,与本车速v低的情况相比,取得更长的预测时间τ。也就是说,本车速v越高则取得越长的预测时间τ。
114.另外,在本例中,增益a基于弯路半径r及本车速v而设定。特别是,增益a从下式7取得。在下式7中,“r”是弯路半径。“v”是本车速。“g(r,v)”是将弯路半径r及本车速v设为变量的函数。
115.a=g(r,v)
…
(7)
116.根据上式7,在弯路半径r小的情况下,与弯路半径r大的情况相比,取得更小的值的增益a。也就是说,弯路半径r越小则取得越小的值的增益a。另外,根据上式7,在本车速v高的情况下,与本车速v低的情况相比,取得更大的增益a。也就是说,本车速v越高则取得越大的增益a。另外,根据上式7而取得的增益a是比零大且为“1”以下的值。另外,根据上式7,在弯路半径r比零大的情况下,至少取得比“1”小的增益a。
117.此外,作为函数h(r,v)、函数g(r,v),能够利用一次式、二次式或s形函数。或者,也可以是,将函数h(r,v)、函数g(r,v)以映射(或查找表)的形式进行存储,对该映射应用弯路半径r及本车速v,从而取得预测时间τ及增益a。或者,如先前所述,也可以基于本车速v及弯路半径r来判定紧迫度的有无。也可以是,在无紧迫度的情况下,设定比较短的时间作为预测时间τ,在有紧迫度的情况下,设定比该时间长的时间作为预测时间τ。
118.从上式4取得的目标操舵角θtgt如图6a及图6b中由线la所示那样,在时刻t61(方
向盘操作开始时刻t)开始变得比零大。然后,随着时间的经过,目标操舵角θtgt逐渐变大,在达到其最大值之后,逐渐变小,在本车辆100结束了弯路行驶的时刻t63成为零。
119.另一方面,从上式5取得的引导操舵角θg如在图6a及图6b中由线lg所示那样,在比时刻t61(方向盘操作开始时刻t)早的时刻t60开始变得比零大。然后,引导操舵角θg随着时间的经过逐渐变大,在达到其最大值θmax之后,逐渐变小,在比本车辆100结束弯路行驶的时刻t63早的时刻t62成为零。
120.这样,在本例中,在检测到弯路且取得了该弯路的弯路半径r的情况下,设定比零长的预测时间τ。因此,引导操舵角θg的设定在比方向盘操作开始时刻t(时刻t61)早的时刻t60开始。换言之,从比方向盘操作开始时刻t(时刻t61)早的时刻t60起引导操舵角θg变得比零大。
121.另外,在本例中,在检测到弯路且取得了该弯路的弯路半径r的情况下,设定比“1”小的增益a。因此,引导操舵角θg的最大值θmax比目标操舵角θtgt的最大值小。
122.而且,在弯路半径r小的情况下,与弯路半径r大的情况相比,预测时间τ被设定为更长的时间。因此,在弯路半径r小的情况下,与弯路半径r大的情况相比,开始引导操舵角θg的设定的时刻t60成为比方向盘操作开始时刻t(时刻t61)更早的时刻。
123.另外,在本车速v高的情况下,与本车速v低的情况相比,预测时间τ被设定为更长的时间。因此,在本车速高的情况下,与本车速v低的情况相比,开始引导操舵角θg的设定的时刻t60成为比方向盘操作开始时刻t(时刻t61)更早的时刻。
124.而且,在弯路半径r小的情况下,与弯路半径r大的情况相比,增益a被设定为更小的值。因此,在弯路半径r小的情况下,与弯路半径r大的情况相比,引导操舵角θg的最大值θmax被设定为更小的值。
125.另外,在本车速v高的情况下,与本车速v低的情况相比,增益a被设定为更大的值。因此,在本车速v高的情况下,与本车速v低的情况相比,引导操舵角θg的最大值θmax被设定为更大的值。
126.根据以上内容,在弯路半径r大并且本车速v高的情况下,引导操舵角θg随着时间的经过而如图6a中由线lg所示那样变化。在弯路半径r小并且本车速v低的情况下,引导操舵角θg随着时间的经过而如图6b中由线lg所示那样变化。
127.并且,车辆操舵控制装置10在设定引导操舵角θg后,在实际的操舵角θ比引导操舵角θg小的情况下,实际的操舵角θ相对于引导操舵角θg的差(操舵角差δθ)越大,则使操舵反作用力比基准的操舵反作用力越小。
128.另一方面,车辆操舵控制装置10在实际的操舵角θ比引导操舵角θg大时,实际的操舵角θ相对于引导操舵角θg的差(操舵角差δθ)越大,则使操舵反作用力比基准的操舵反作用力越大。
129.以上是本公开的实施方式的变形例的车辆操舵控制装置10的工作的概要。
130.若在成为了驾驶员dr开始用于使本车辆100沿着弯路行驶的方向盘操作的时刻(方向盘操作开始时刻)时减小操舵反作用力,则驾驶员dr容易进行用于使本车辆100沿着弯路行驶的方向盘操作。然而,有可能该方向盘操作延迟而无法使本车辆100沿着弯路适当地行驶。
131.根据本例的车辆操舵控制装置10,在比方向盘操作开始时刻(操舵操作开始时刻)
更早的定时开始引导操舵角θg(引导操舵操作量)的设定。其结果,在更早的定时减小操舵反作用力。因此,即使在弯路半径r小的情况(弯路的弯曲程度大的情况)下,也能够使得用于使本车辆100沿着弯路行驶的方向盘操作(操舵操作)不延迟地进行。其结果,能够使本车辆100沿着弯路适当地行驶。
132.另外,在弯路半径r小的情况下,驾驶员dr为了使本车辆100沿着该弯路行驶而需要更大幅地进行方向盘操作。因此,驾驶员dr的方向盘操作延迟的可能性变高。
133.根据本例的车辆操舵控制装置10,在弯路半径r小时,用于将开始引导操舵角θg的设定的定时提前的预测时间τ(预定时间)被设定为长的时间。因此,在比驾驶员dr开始用于使本车辆100沿着该弯路行驶的方向盘操作的时间点更早的定时开始引导操舵角θg的设定,其结果,在更早的定时减小操舵反作用力。因此,能够抑制驾驶员dr的方向盘操作延迟。因此,在本车辆100正在弯路行驶的期间,实际的操舵角θ在与目标操舵角θtgt一致的(或大致一致的)状态下变化。由此,能够使本车辆100沿着弯路适当地行驶。
134.另外,在本车速v(本车辆100的行驶速度)高的情况下,驾驶员dr为了使本车辆100沿着弯路行驶而需要更快地进行方向盘操作。因此,驾驶员dr的方向盘操作延迟的可能性变高。
135.根据本例的车辆操舵控制装置10,在本车速v高时,用于将开始引导操舵角θg的设定的定时提前的预测时间τ被设定为长的时间。因此,在比驾驶员dr开始用于使本车辆100沿着该弯路行驶的方向盘操作的时间点更早的定时开始引导操舵角θg的设定。其结果,在更早的定时减小操舵反作用力。因此,能够抑制驾驶员dr的方向盘操作延迟。因此,在本车辆100正在弯路行驶的期间,实际的操舵角θ以与目标操舵角θtgt一致的(或大致一致的)状态变化。由此,能够使本车辆100沿着弯路适当地行驶。
136.另外,驾驶员dr在使本车辆100沿着弯路行驶的情况下,在增大了操舵角θ(操舵操作的量)之后,减小操舵角θ。此时,若操舵角θ接近由目标模式规定的目标操舵角θtgt(目标操舵操作量)的最大值,则操舵角θ有时会超过该最大值地变大。
137.根据本例的车辆操舵控制装置10,引导操舵角θg的最大值θmax被限制为比目标操舵角θtgt的最大值小预定值小的值。因此,在操舵角θ接近了目标操舵角θtgt的最大值时,增大操舵反作用力。因此,能够抑制驾驶员dr的方向盘操作超过目标操舵角θtgt的最大值地变大。因此,在本车辆100正在弯路行驶的期间,实际的操舵角θ以与目标操舵角θtgt一致的(或大致一致的)状态下变化。由此,能够使本车辆100沿着弯路适当地行驶。
138.另外,在本车速v高的情况下,驾驶员dr为了使本车辆100沿着弯路行驶而需要更大幅地进行方向盘操作。因此,操舵角θ处于变大的倾向。
139.根据本例的车辆操舵控制装置10,在本车速v高时,用于使引导操舵角θg的最大值θmax比目标操舵角θtgt的最大值小的预定值被设定为小的值。因此,在本车速v高的状态下操舵角θ接近了目标操舵角θtgt的最大值时,增大操舵反作用力的程度变小。因此,能够适当地抑制操舵角θ超过目标操舵角θtgt的最大值地变大。因此,在本车辆100正在弯路行驶的期间,实际的操舵角θ以与目标操舵角θtgt一致的(或大致一致的)状态变化。由此,能够使本车辆100沿着弯路适当地行驶。
140.在弯路半径r小的情况下,驾驶员dr为了使本车辆100沿着该弯路行驶而需要更大幅地进行方向盘操作。因此,操舵角θ超过由目标模式规定的目标操舵角θtgt的最大值地变
大的可能性变高。
141.根据本例的车辆操舵控制装置10,在弯路半径r小时,用于使引导操舵角θg的最大值θmax比目标操舵角θtgt的最大值小的预定值被设定为大的值。因此,在弯路半径r小的情况下操舵角θ接近了目标操舵角θtgt的最大值时,增大操舵反作用力的程度变大。因此,能够适当地抑制操舵角θ超过目标操舵角θtgt的最大值地变大。因此,在本车辆100正在弯路行驶的期间,实际的操舵角θ以与目标操舵角θtgt一致的(或大致一致的)状态下变化。因此,能够使本车辆100沿着弯路适当地行驶。
142.变形例的车辆操舵控制装置的具体工作
143.接着,对本公开的实施方式的变形例的车辆操舵控制装置10的具体工作进行说明。该车辆操舵控制装置10的ecu90的cpu以预定运算周期来执行图7所示的例程。因此,在成为预定的定时时,cpu从图7的步骤s700开始处理,使该处理进入步骤s705。cpu在步骤s705中判定弯路进入条件是否成立。
144.弯路进入条件是检测到预测为本车辆100将在预定时间以内进入的弯路这一条件。因此,弯路进入条件是在检测到这样的弯路时成立,然后,在本车辆100结束在该弯路行驶时成为不成立。因此,弯路进入条件是在检测到这样的弯路之后本车辆100正在这样的弯路行驶的期间成立,在除此以外时成为不成立。cpu也可以基于gps信号及地图信息来判定弯路进入条件是否成立。
145.cpu在步骤s705中cpu判定为“是”的情况下,使处理进入步骤s710。在步骤s710中,cpu取得弯路半径r及本车速v。接着,cpu使处理进入步骤s715,将在步骤s710中所取得的弯路半径r及本车速v分别应用于上式6及上式7来取得预测时间τ及增益a。接着,cpu使处理进入步骤s720,将在步骤s715中所取得的预测时间τ及增益a应用于上式5来取得引导操舵角θg。
146.接着,cpu使处理进入步骤s725,取得在步骤s720中所取得的引导操舵角θg与实际的操舵角θ之差(操舵角差δθ)。接着,cpu使处理进入步骤s730,基于在步骤s725中所取得的操舵角差δθ取得目标操舵反作用力ftgt。接着,cpu使处理进入步骤s735,以使得与在步骤s730中所取得的目标操舵反作用力ftgt相当的操舵反作用力施加于方向盘35的方式控制反作用力致动器232的工作。接着,cpu使处理进入步骤s795,暂且结束本例程。
147.另一方面,cpu在步骤s705中判定为“否”的情况下,使处理直接进入步骤s795,暂且结束本例程。
148.以上是本公开的实施方式的变形例的车辆操舵控制装置10的具体工作。车辆操舵控制装置10也可以具备1个以上的处理器。
149.此外,本公开不限定于上述实施方式,能够在本公开的范围内采用各种变形例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。