1.本发明的技术涉及一种光学扫描装置及图像形成装置。
背景技术:
2.已知有一种图像形成装置,其通过向由mems(micro electro mechanical systems:微机电系统)构成的反射镜装置照射光,在屏幕等上描绘图像。反射镜装置具有绕至少一个轴摆动的可动反射镜。
3.反射镜装置为了减小摆动的可动反射镜的空气阻力,容纳在内部为真空或负压的封装体中。在该情况下,激光经由设置在封装体中的玻璃窗从外部入射到反射镜装置。
4.在将反射镜装置容纳在封装体中的情况下,入射到玻璃窗的激光的一部分由玻璃窗的表面反射,该反射光有可能作为杂散光入射到反射镜装置的图像的描绘区域内。在该情况下,若杂散光入射到描绘区域内,则会在图像中产生不需要的亮点。
5.在非专利文献1中,为了抑制上述反射光,考虑在玻璃窗的表面设置防反射膜,但由于利用防反射膜难以完全抑制反射光,因此提出了通过使玻璃窗倾斜将反射光引导至描绘区域外。
6.非专利文献1:s.gu-stoppel et al.,advanced manufacturing,electronics and microsystems:techconnect briefs 2016,p.87-90,《https://briefs.techconnect.org/wp-content/volumes/tcb2016v4/pdf/364.pdf》
7.然而,若如非专利文献1中记载那样使玻璃窗倾斜,则存在由于封装体的厚度增加而导致封装体尺寸变大的问题。并且,存在由于封装体尺寸变大而制造成本增大的问题。
技术实现要素:
8.本发明的技术的目的在于,提供一种能够不使杂散光入射到描绘区域而小型化且能够降低制造成本的光学扫描装置及图像形成装置。
9.为了实现上述目的,本发明的光学扫描装置具备:反射镜装置,具有绕至少一个轴摆动的可动反射镜;及封装体,具有不构成同一平面的至少两个以上透光面,且在内部容纳有反射镜装置,封装体的两个以上的透光面之中,一个是从外部取入向可动反射镜的入射光的光取入面,另一个是将由可动反射镜反射的光取出到外部的光取出面。
10.封装体的内部优选为真空或负压。
11.优选在封装体中设置有用于从外部取入驱动可动反射镜的驱动信号的信号输入端子。
12.优选在封装体的内部设置有光学元件,所述光学元件使从光取入面入射的光偏转并引导至可动反射镜。
13.优选光取入面及光取出面由不平行的两个透光面构成。
14.优选在封装体的内部设置有摄像装置和用于将从摄像装置输出的摄像信号取出到外部的信号输出端子,光取出面反射由可动反射镜反射的光的一部分并将其引导至摄像
装置。
15.本发明的图像形成装置具备:光学扫描装置,具备:反射镜装置,具有绕至少一个轴摆动的可动反射镜;及封装体,具有不构成同一平面的至少两个以上透光面,且在内部容纳有反射镜装置,及发光装置,射出光,封装体的两个以上的透光面之中,一个是从外部取入向可动反射镜的入射光的光取入面,另一个是将由可动反射镜反射的光取出到外部的光取出面,从发光装置射出的光经由光取入面入射到可动反射镜。
16.发明效果
17.根据本发明的技术,能够提供一种能够不使杂散光入射到描绘区域而小型化且能够降低制造成本的光学扫描装置及图像形成装置。
附图说明
18.图1是表示图像形成装置的结构的一例的示意图。
19.图2是表示mems反射镜的结构的一例的概略立体图。
20.图3是表示光学扫描装置的外观结构的一例的概略立体图。
21.图4是表示光学扫描装置的截面结构的一例的概略剖视图。
22.图5是表示第2实施方式所涉及的光学扫描装置的截面结构的一例的概略剖视图。
23.图6是表示第3实施方式所涉及的光学扫描装置的截面结构的一例的概略剖视图。
24.图7是表示控制装置的功能结构的一例的框图。
25.图8是表示第1驱动信号、第1零交叉信号及第1基准信号的一例的图。
26.图9是表示第2驱动信号、第2零交叉信号及第2基准信号的一例的图。
27.图10是表示在校准模式下描绘在投影面上的图案的一例的图。
28.图11是表示在反射镜部的摆动与第1基准信号及第2基准信号的定时之间产生偏差的情况下,描绘在投影面上的图案的一例的图。
29.图12是表示校正部的功能结构的一例的图。
30.图13是表示信号校正部的定时校正的一例的图,图13(a)表示校正第1基准信号的定时的例子,图13(b)表示校正第2基准信号的定时的例子。
具体实施方式
31.以下,参考附图对本发明的技术所涉及的实施方式详细进行说明。作为一例,在以下各实施方式中,对将本发明的技术适用于通过利萨茹方式扫描激光从而在投影面上形成图像的图像形成装置的方式进行说明。
32.[第1实施方式]
[0033]
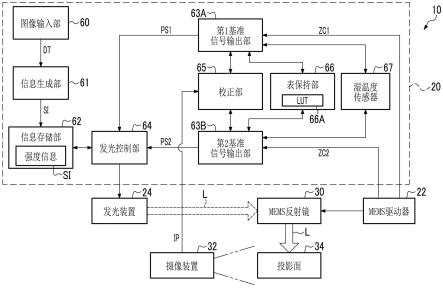
图1表示本实施方式的图像形成装置10的结构的一例。如图1所示,本实施方式的图像形成装置10具备控制装置20、mems驱动器22、发光装置24、合波光学系统26、准直器28及光学扫描装置30。光学扫描装置30由mems反射镜32、容纳mems反射镜32的封装体33构成。mems反射镜32是本发明的技术所涉及的“反射镜装置”的一例。
[0034]
发光装置24具有激光驱动器25及激光光源27。本实施方式的激光驱动器25根据从控制装置20供给的强度调制信号驱动激光光源27,从激光光源27输出用于形成图像的激光。激光光源27例如输出r(red:红)、g(green:绿)及b(b:blue:蓝)3色激光。另外,激光是本
发明的技术所涉及的“光”的一例。
[0035]
从激光光源27输出的激光由合波光学系统26合波后,经由准直器28照射到封装体33内的mems反射镜32。聚集在mems反射镜32上的激光被mems反射镜32朝向投影面34反射。投影面34例如是用于投影图像的屏幕或人眼的视网膜等。即,本实施方式的图像形成装置10用于投影仪或ar(augmented reality:增强现实)眼镜等。
[0036]
另外,在本实施方式中,投影面34并不限定于屏幕等实际物体的表面,也包括空间上的假想面。
[0037]
mems驱动器22根据来自控制装置20的控制来驱动mems反射镜32。在mems反射镜32中,反射激光l的反射镜部40(参考图2)将彼此正交的两个轴分别作为中心轴独立地摆动。在本实施方式中,反射镜部40根据驱动信号摆动,由此激光l在投影面34上以描绘利萨茹曲线的状态被扫描。利萨茹曲线是根据绕第1轴的摆动频率、绕第2轴的摆动频率及它们的相位差确定的曲线。反射镜部40是本发明的技术所涉及的“可动反射镜”的一例。
[0038]
本实施方式的控制装置20包括fpga(field programmable gate array:现场可编程门阵列)20a及存储器20b。存储器20b例如是易失性存储器,存储表示投影在投影面34上的图像的图像信号等各种信息。例如,存储器20b中存储从图像形成装置10的外部输入的图像信号。
[0039]
图2表示mems反射镜32的结构的一例。mems反射镜32具有反射镜部40、第1支承部41、第1可动框42、第2支承部43、第2可动框44、连接部45及固定框46。
[0040]
反射镜部40具有反射入射光的反射面40a。反射面40a例如由金(au)、铝(al)、银(ag)、或银合金等金属薄膜形成。反射面40a的形状例如是圆形状。
[0041]
第1支承部41在反射镜部40的外侧分别配置在隔着第2轴a2对置的位置。第1支承部41在第1轴a1上与反射镜部40连接,将反射镜部40支承为能够绕第1轴a1摆动。
[0042]
第1可动框42是包围反射镜部40的矩形状的框体,在第1轴a1上经由第1支承部41与反射镜部40连接。在第1可动框42上,在隔着第1轴a1对置的位置分别形成有压电元件50。如此,通过在第1可动框42上形成两个压电元件50,构成一对第1致动器51。
[0043]
一对第1致动器51配置在隔着第1轴a1对置的位置。第1致动器51通过对反射镜部40施加绕第1轴a1的转矩,使反射镜部40绕第1轴a1摆动。
[0044]
第2支承部43在第1可动框42的外侧分别配置在隔着第1轴a1对置的位置。第2支承部43在第2轴a2上与第1可动框42连接,将第1可动框42及反射镜部40支承为能够绕第2轴a2摆动。在本实施方式中,第2支承部43是沿着第2轴a2延伸的扭杆。
[0045]
第2可动框44是包围第1可动框42的矩形状的框体,在第2轴a2上经由第2支承部43与第1可动框42连接。在第2可动框44上,在隔着第2轴a2对置的位置分别形成有压电元件50。如此,通过在第2可动框44上形成两个压电元件50,构成一对第2致动器52。
[0046]
一对第2致动器52配置在隔着第2轴a2对置的位置。第2致动器52通过对反射镜部40及第1可动框42施加绕第2轴a2的转矩,使反射镜部40绕第2轴a2摆动。
[0047]
连接部45在第2可动框44的外侧分别配置在隔着第1轴a1对置的位置。连接部45在第2轴a2上与第2可动框44连接。
[0048]
固定框46是包围第2可动框44的矩形状的框体,在第2轴a2上经由连接部45与第2可动框44连接。
[0049]
在本实施方式中,第1轴a1与第2轴a2彼此正交。在以下说明中,将与第1轴a1平行的方向设为x方向,将与第2轴a2平行的方向设为y方向,将与第1轴a1及第2轴a2正交的方向设为z方向。
[0050]
图3表示光学扫描装置30的外观结构的一例。封装体33为大致长方体形状。例如,封装体33由平板状的基板35和箱状的盖部件36构成。例如,基板35及盖部件36由具有透光性的玻璃形成。通过将盖部件36接合到基板35而构成封装体33。在封装体33的内部容纳有mems反射镜32。
[0051]
并且,封装体33的内部为真空或负压。如此,通过使封装体33的内部真空或负压,能够减少反射镜部40摆动时的能量损失,能够以较低的驱动电压实现较大的偏转角。另外,负压是指封装体33的内部的气压低于封装体33的外部的气压(即大气压)。
[0052]
盖部件36具有4个透光面37。4个透光面37由一个上表面和3个侧面构成。在本实施方式中,作为4个透光面37中的一个侧面的透光面37作为从外部取入向反射镜部40的入射光的“光取入面”发挥功能。并且,作为4个透光面37中的一个上表面的透光面37作为将由反射镜部40反射的光取出到外部的“光取出面”发挥功能。即,在本实施方式中,光取入面及光取出面由不平行的两个透光面37构成。
[0053]
从发光装置24射出的激光l透过光取入面上的光取入区域38入射到封装体33的内部。入射到封装体33的内部的激光l入射到mems反射镜32的反射镜部40。由反射镜部40反射的激光l透过光取出面上的光取出区域39取出到封装体33的外部。透过光取出区域39的激光l入射到投影面34(参考图1)。
[0054]
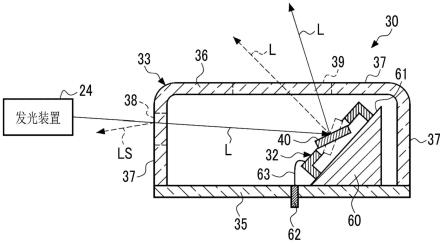
图4表示光学扫描装置30的截面结构的一例。如图4所示,mems反射镜32经由支承部件60固定在基板35上。例如,支承部件60为三棱柱形状,具有倾斜面61。mems反射镜32与倾斜面61接合。即,反射镜部40的表面在静止的状态下不与光取入面和光取出面的任一个平行。
[0055]
在基板35上设置有用于从外部取入用于驱动反射镜部40的驱动信号的信号输入端子62。信号输入端子62例如经由接合线63与mems反射镜32电连接。mems驱动器22(参考图1)经由信号输入端子62向mems反射镜32输入驱动信号。例如,相对于一对第1致动器51及一对第2致动器52分别单独设置有信号输入端子62。对一对第1致动器51和一对第2致动器52赋予频率不同的驱动信号。
[0056]
如图3及图4所示,从发光装置24射出的激光l的一部分被光取入面反射而成为杂散光ls。由于光取出面由不与构成光取入面的透光面37构成同一平面的透光面37构成,因此杂散光ls不会入射到描绘区域(即投影面34)。
[0057]
本实施方式的光学扫描装置30不需要为了将杂散光ls引导至描绘区域外而如以往那样使玻璃窗倾斜,因此能够不增大封装体33的厚度而减小封装体尺寸。因此,根据本发明的技术,能够实现不使杂散光入射到描绘区域而小型化且能够降低制造成本的光学扫描装置30。
[0058]
另外,在上述实施方式中,由玻璃等透光性材料形成封装体33整体,但封装体33的局部也可以由遮光性部件形成。例如,封装体33中的光取入区域38及光取出区域39以外的部分也可以由遮光性部件形成。
[0059]
[第2实施方式]
[0060]
接着,对第2实施方式进行说明。在第1实施方式中,从盖部件36的一个侧面将激光取入到封装体33的内部,但在第2实施方式中,从基板35将激光取入到封装体33的内部。
[0061]
图5表示第2实施方式所涉及的光学扫描装置30的截面结构的一例。基板35具有透光性,其表面是透光面37。在实施方式中,基板35的透光面37作为从外部取入向反射镜部40的入射光的“光取入面”发挥功能。从发光装置24射出的激光l透过基板35的光取入区域38,入射到封装体33的内部。入射到封装体33的内部的激光l入射到盖部件36的内表面侧。
[0062]
在盖部件36的内表面侧的入射激光l的位置设置有光学元件70。光学元件70使从光取入区域38入射的激光l偏转并将其引导至mems反射镜32的反射镜部40。在本实施方式中,光学元件70是通过溅射法或蒸镀法形成的反射膜。光学元件70通过镜面反射使激光l偏转以引导至反射镜部40。
[0063]
在本实施方式中,mems反射镜32直接固定到基板35,而不使用支承部件60(参考图4)。即,在本实施方式中,mems反射镜32不相对于基板35倾斜。由反射镜部40反射的激光l与上述实施方式同样地,透过盖部件36的上表面的光取出区域39取出到封装体33的外部。
[0064]
如上所述,在第2实施方式中,由于从封装体33的背面侧取入激光l,因此通过在光取入面上反射一部分而产生的杂散光ls不会入射到描绘区域。因此,在第2实施方式中,也不需要为了将杂散光ls引导至描绘区域外而如以往那样使玻璃窗倾斜,因此能够实现小型化且能够降低制造成本的光学扫描装置30。并且,由于不需要使mems反射镜32相对于基板35倾斜,因此能够使封装体33的厚度更薄。
[0065]
另外,光学元件70并不限定于反射膜,也可以是光栅、全息图等光学元件。光栅或全息图能够以与入射角不同的出射角射出激光l。因此,通过将光学元件70用作光栅、全息图等光学元件,配置光学元件70的位置等设计自由度提高。
[0066]
[第3实施方式]
[0067]
接着,对第3实施方式进行说明。在第3实施方式中,在封装体33的内部设置摄像装置。摄像装置用于校正发光装置24的激光l的发光定时。
[0068]
图6表示第3实施方式所涉及的光学扫描装置30的截面结构的一例。在本实施方式中,在封装体33的内部的基板35上安装有摄像装置72。摄像装置72设置在由反射镜部40反射的激光l中的由光取出区域39反射的激光l的光路上。在基板35上设置有用于将从摄像装置72输出的摄像信号取出到外部的信号输出端子73。本实施方式所涉及的光学扫描装置30的其他结构与第1实施方式所涉及的光学扫描装置30的结构相同。
[0069]
摄像装置72通过拍摄由光取出区域39反射的激光l生成摄像图像ip,将所生成的摄像图像ip输出到控制装置20(参考图1)。摄像装置72由ccd(charge coupled device:电荷耦合器件)型图像传感器、cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)型图像传感器等图像传感器构成。并且,摄像装置72也可以由psd(position sensitive detector:位置敏感检测器)构成。摄像图像ip用于校正后述的第1基准信号及第2基准信号的定时。摄像图像ip是本发明的技术所涉及的“摄像信息”的一例。
[0070]
图7表示控制装置20的功能结构的一例。图7所示,控制装置20包括图像输入部80、信息生成部81、信息存储部82、第1基准信号输出部83a、第2基准信号输出部83b、发光控制部84、校正部85、表保持部86及湿温度传感器87。图像输入部80、信息生成部81、信息存储部82、第1基准信号输出部83a、第2基准信号输出部83b、发光控制部84、校正部85及表保持部
86是通过fpga20a及存储器20b协同进行动作而实现的功能部。
[0071]
从外部向图像输入部80输入表示形成的图像的图像数据dt。以下,有时将与输入到图像输入部80的图像数据dt对应的图像称为输入图像。作为一例,在本实施方式中,由rgb信号表示的彩色图像数据dt输入到图像输入部80。输入到图像输入部80的图像数据dt输出到信息生成部81。另外,输入到图像输入部80的图像数据dt并不限定于本实施方式,只要是与形成的图像对应的数据即可。例如,可以是表示是否输出激光l的2值化的数据。并且,例如,也可以是表示输出量的多个值的数据。
[0072]
信息生成部81生成表示mems反射镜32的激光l的扫描位置与输入图像的信号强度的对应关系的强度信息si。在输入图像为彩色图像的情况下,信号强度表示各个rgb信号的强度。信息存储部82存储由信息生成部81生成的强度信息si。
[0073]
作为一例,mems驱动器22将图8所示的第1驱动信号v1a及v1b输出到mems反射镜32的一对第1致动器51,并且生成第1零交叉信号zc1并输出到第1基准信号输出部83a。第1驱动信号v1a与第1驱动信号v1b是相位相差180
°
的正弦波。
[0074]
第1零交叉信号zc1是表示第1驱动信号v1a及v1b成为零的点的脉冲状的信号。另外,从mems驱动器22输出到第1基准信号输出部83a的信号并不限定于零交叉信号,只要是具有与第1驱动信号v1a及v1b相同的周期的信号即可。
[0075]
作为一例,mems驱动器22将图9所示的第2驱动信号v2a及v2b输出到mems反射镜32的一对第2致动器52,并且生成第2零交叉信号zc2并输出到第2基准信号输出部83b。第2驱动信号v2a与第2驱动信号v2b是相位相差180
°
的正弦波。
[0076]
第2零交叉信号zc2是表示第2驱动信号v2a及v2b成为零的点的脉冲状的信号。另外,从mems驱动器22输出到第2基准信号输出部83b的信号并不限定于零交叉信号,只要是具有与第2驱动信号v2a及v2b相同的周期的信号即可。
[0077]
第1驱动信号v1a及v1b的频率(以下,称为第1驱动频率。)与第2驱动信号v2a及v2b的频率(以下,称为第2驱动频率。)的频率比不同。第1驱动频率与第2驱动频率的频率比根据mems反射镜32进行的光扫描的利萨茹曲线的形状来确定。
[0078]
第1基准信号输出部83a推测反射镜部40的绕第1轴a1的偏转角(以下,称为第1偏转角。)θ1成为第1基准角的时刻,将第1基准信号ps1输出到发光控制部84。在本实施方式中,将第1基准角设为0
°
。第1基准信号输出部83a根据第1驱动信号v1a及v1b推测第1偏转角θ1成为第1基准角的时刻,生成第1基准信号ps1。
[0079]
具体而言,如图8所示,第1基准信号输出部83a将使从mems驱动器22输入的第1零交叉信号zc1延迟了延迟时间d1的信号作为第1基准信号ps1输出。在反射镜部40绕第1轴a1共振的情况下,延迟时间d1理想上是相当于第1零交叉信号zc1的周期的1/4倍的时间,但由于环境条件(温度、湿度等)而产生偏差。因此,在本实施方式中,第1基准信号输出部83a根据由湿温度传感器87检测出的温度及湿度、和保持在表保持部86中的查找表(以下,称为lut。)86a获取延迟时间d1,根据所获取的延迟时间d1生成第1基准信号ps1。
[0080]
第2基准信号输出部83b推测反射镜部40的绕第2轴a2的偏转角(以下,称为第2偏转角。)θ2成为第2基准角的时刻,将第2基准信号ps2输出到发光控制部84。在本实施方式中,将第2基准角设为0
°
。第2基准信号输出部83b根据第2驱动信号v2a及v2b推测第2偏转角θ2成为第2基准角的时刻,生成第2基准信号ps2。
[0081]
具体而言,如图9所示,第2基准信号输出部83b将使从mems驱动器22输入的第2零交叉信号zc2延迟了延迟时间d2的信号作为第2基准信号ps2输出。在反射镜部40绕第2轴a2共振的情况下,延迟时间d2理想上是相当于第2零交叉信号zc2的周期的1/4倍的时间,但由于环境条件(温度、湿度等)而产生偏差。因此,在本实施方式中,第2基准信号输出部83b根据由湿温度传感器87检测出的温度及湿度、和保持在表保持部86中的lut86a获取延迟时间d2,根据所获取的延迟时间d2生成第2基准信号ps2。
[0082]
lut86a中预先记录有与延迟时间d1、温度及湿度的关系、与延迟时间d2、温度及湿度的关系。这些关系例如根据过去的历史来确定。
[0083]
发光控制部84根据第1基准信号ps1及第2基准信号ps2使发光装置24射出激光l。在将基于图像数据dt的图像描绘在投影面34上的描绘模式中,发光控制部84从信息存储部82读出强度信息si,每隔恒定时间(例如,每隔时钟周期)使发光装置24射出以第1基准信号ps1及第2基准信号ps2为基准而确定的强度的激光l。
[0084]
并且,在本实施方式中,进行用于校正由第1基准信号输出部83a及第2基准信号输出部83b分别输出的第1基准信号ps1及第2基准信号ps2的定时的校准模式。在校准模式下,发光控制部84根据从第1基准信号输出部83a输出第1基准信号ps1的定时及从第2基准信号输出部83b输出第2基准信号ps2的定时,使发光装置24射出激光l。即,在校准模式下,发光控制部84在推定第1偏转角θ1成为第1基准角(在本实施方式中0
°
)的时刻和推定第2偏转角θ2成为第2基准角(在本实施方式中0
°
)的时刻使发光装置24射出激光l。
[0085]
在校准模式下,摄像装置72对从发光装置24射出,由反射镜部40反射的激光l中的由光取出区域39反射的激光l进行拍摄。摄像装置72将通过拍摄生成的摄像图像ip输出到校正部85。描绘在投影面34上的图案拍摄到摄像图像ip中。
[0086]
校正部85根据摄像图像ip中映现的图案从规定形状的偏移量,校正第1基准信号输出部83a及第2基准信号输出部83b分别输出的第1基准信号ps1及第2基准信号ps2的定时。
[0087]
图10表示在校准模式下描绘在投影面34上的图案的一例。在本例中,为了简化说明,将第1驱动频率与第2驱动频率的频率比设为3:2。在本例中,通过由mems反射镜32进行的光扫描在投影面34上描绘利萨茹曲线90。
[0088]
图10表示反射镜部40的摆动与第1基准信号ps1及第2基准信号ps2的定时之间不产生偏差的情况。如此,在未产生偏差的情况下,发光装置24在θ1=0的时刻及θ2=0的时刻射出激光l,因此激光l照射到投影面34上的第1基准线l1及第2基准线l2上。第1基准线l1是通过利萨茹曲线90的中心并与x方向平行的直线,第2基准线l2是通过利萨茹曲线90的中心并与y方向平行的直线。符号p表示激光l照射到投影面34上的点(即亮点)。
[0089]
在以使利萨茹曲线90更密集的方式设定第1驱动频率与第2驱动频率的频率比的情况下,亮点p描绘沿着第1基准线l1及第2基准线l2的直线状的图案。
[0090]
图11表示反射镜部40的摆动与第1基准信号ps1及第2基准信号ps2的定时之间产生偏差的情况。如此,在产生偏差的情况下,发光装置24在从θ1=0的时刻及θ2=0的时刻偏移的时刻射出激光l,因此激光l照射到投影面34中从第1基准线l1及第2基准线l2偏移的位置。在本例中,激光l照射到从第1基准线l1偏移的直线l1a及l1b上、和从第2基准线l2偏移的直线l2a及l2b上。
[0091]
直线l1a是激光l照射到利萨茹扫描的去路中的线。直线l1b是激光l照射到利萨茹扫描的回路中的线。并且,直线l2a是激光l照射到利萨茹扫描的去路中的线。直线l2b是激光l照射到利萨茹扫描的回路中的线。另外,去路是指在y方向上第1偏转角θ1增加的路径,并且在x方向上第2偏转角θ2增加的路径。回路是指在y方向上第1偏转角θ1减少的路径,并且在x方向上第2偏转角θ2减少的路径。
[0092]
如此,在反射镜部40的摆动与第1基准信号ps1及第2基准信号ps2的定时之间产生偏差的情况下,第1基准线l1被分离为直线l1a和直线l1b,第2基准线l2被分离为直线l2a和直线l2b。
[0093]
在以使利萨茹曲线90更密集的方式设定第1驱动频率与第2驱动频率的频率比的情况下,亮点p描绘沿着直线l1a、直线l1b、直线l2a及直线l2b的直线状的图案。
[0094]
图12表示校正部85的功能结构的一例。校正部85具有校正量计算部92及信号校正部93。从摄像装置72向校正部85输入摄像图像ip。
[0095]
校正量计算部92根据摄像图像ip,导出直线l1a和直线l1b向y方向的偏移量δy、直线l2a和直线l2b向x方向的偏移量δx。并且,校正量计算部92导出用于设为δx=0的第1基准信号ps1的定时的校正量δ1和用于设为δy=0的第2基准信号ps2的定时的校正量δ2,将所导出的校正量δ1、δ2输出到信号校正部93。校正量计算部92例如根据预先存储的偏移量δx与校正量δ1的关系、及偏移量δy与校正量δ2的关系,导出校正量δ1、δ2。另外,偏移量δx与校正量δ1的关系、及偏移量δy与校正量δ2的关系分别大致成比例关系。
[0096]
另外,校正量计算部92根据在不校正第1基准信号ps1及第2基准信号ps2的定时的状态(即设为δ1=0及δ2=0的状态)下获得的摄像图像ip导出偏移量δx、δy,并根据所导出的偏移量δx、δy导出校正量δ1、δ2。
[0097]
信号校正部93根据从校正量计算部92输入的校正量δ1,校正从第1基准信号输出部83a输出的第1基准信号ps1的定时,根据从校正量计算部92输入的校正量δ2,校正从第2基准信号输出部83b输出的第2基准信号ps2的定时。
[0098]
图13表示信号校正部93的定时校正的一例。图13(a)表示根据校正量δ1校正第1基准信号ps1的定时的例子。图13(b)表示根据校正量δ2校正第2基准信号ps2的定时的例子。通过校正第1基准信号ps1及第2基准信号ps2的定时,成为δx=0及δy=0。由此,直线l1a与直线l1b一致,且直线l2a与直线l2b一致。
[0099]
另外,信号校正部93也可以设置在第1基准信号输出部83a及第2基准信号输出部83b各自的内部。在该情况下,第1基准信号输出部83a根据从校正量计算部92输入的校正量δ1来校正第1基准信号ps1的定时。同样地,第2基准信号输出部83b根据从校正量计算部92输入的校正量δ2来校正第2基准信号ps2的定时。
[0100]
上述校准模式例如在启动图像形成装置10时在规定期间执行。校准模式的结束后,在描绘模式下,第1基准信号输出部83a及第2基准信号输出部83b继续进行基于上述校正量δ1、δ2的定时校正。另外,校准模式也可以在描绘模式的执行中定期执行。
[0101]
如以上所说明,本实施方式所涉及的图像形成装置10根据由摄像装置72获取的摄像信息来校正第1基准信号ps1及第2基准信号ps2的定时,由此能够抑制描绘在投影面34上的图像紊乱。
[0102]
另外,在上述各实施方式中,使用双轴mems反射镜32作为光学扫描装置,但也可以
使用单轴mems反射镜作为光学扫描装置。因此,本发明的技术也能够适用于具备单轴光学扫描装置的图像形成装置,所述单轴光学扫描装置使可动反射镜绕第1轴摆动。
[0103]
在上述第3实施方式中,例如,作为执行图像输入部80、信息生成部81、信息存储部82、第1基准信号输出部83a、第2基准信号输出部83b、发光控制部84、校正部85及表保持部86这样的各种处理的处理部(processing unit)的硬件结构,能够使用以下所示的各种处理器(processor)。在上述各种处理器中,除了执行软件(程序)而作为各种处理部发挥功能的通用的处理器即cpu(central processing unit:中央处理单元)以外,还包括在前述fpga等的制造后能够变更电路结构的处理器即可编程逻辑器件(programmable logic device:pld)、asic(application specific integrated circuit:专用集成电路)等具有为了执行特定的处理而专门设计的电路结构的处理器即专用电路等。
[0104]
一个处理部可以由这些各种处理器中的一个构成,也可以由相同种类或不同种类的两个以上的处理器的组合(例如,多个fpga的组合和/或cpu和fpga的组合)构成。并且,也可以由一个处理器构成多个处理部。
[0105]
作为由一个处理器构成多个处理部的例子,第一,有如下方式:如以客户端及服务器等计算机为代表那样,由一个以上的cpu和软件的组合构成一个处理器,该处理器作为多个处理部发挥功能。第二,有如下方式:如以片上系统(system on chip:soc)等为代表那样,使用由一个ic(integrated circuit:集成电路)芯片实现包括多个处理部的系统整体的功能的处理器。如此,各种处理部使用一个以上的上述各种处理器作为硬件结构而构成。
[0106]
而且,作为这些各种处理器的硬件结构,更具体而言,能够使用组合了半导体元件等电路元件的电路(circuitry)。
[0107]
本说明书所记载的全部文献、专利申请以及技术标准,与具体且分别地记载将各个文献、专利申请以及技术标准通过参考而引入的情况相同程度地,通过参考而引入本说明书中。
[0108]
符号说明
[0109]
10-图像形成装置,20-控制装置,20b-存储器,22-驱动器,24-发光装置,25-激光驱动器,26-合波光学系统,27-激光光源,28-准直器,30-光学扫描装置,32-mems反射镜,33-封装体,34-投影面,35-基板,36-盖部件,37-透光面,38-光取入区域,39-光取出区域,40-反射镜部,40a-反射面,41-第1支承部,42-第1可动框,43-第2支承部,44-第2可动框,45-连接部,46-固定框,50-压电元件,51-第1致动器,52-第2致动器,60-支撑部件,61-倾斜面,62-信号输入端子,63-接合线,70-光学元件,72-摄像装置,73-信号输出端子,80-图像输入部,81-信息生成部,82-信息存储部,83a-第1基准信号输出部,83b-第2基准信号输出部,84-发光控制部,85-校正部,86-表保持部,87-湿温度传感器,90-利萨茹曲线,92-校正量计算部,93-信号校正部,δx、δy-偏移量,δ1、δ2-校正量,θ1-第1偏转角,θ2-第2偏转角,d1、d2-延迟时间,dt-图像数据,ip-摄像图像,l-激光,l1-第1基准线,l1a、l1b-直线,l2-第2基准线,l2a、l2b-直线,p-亮点,ps1-第1基准信号,ps2-第2基准信号,si-强度信息,v1a、v1b-第1驱动信号,v2a、v2b-第2驱动信号,zc1-第1零交叉信号,zc2-第2零交叉信号,a
1-第1轴,a
2-第2轴。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。