一种基于参数化模型的双基sar滤波反投影两维自聚焦方法
技术领域
1.本发明涉及一种基于参数化模型的双基sar滤波反投影两维自聚焦方法,属于雷达成像领域。
背景技术:
2.近年来,双基合成孔径雷达(sar)技术一直是雷达领域的一个热点研究方向。合成孔径雷达根据其发射机和接收机的位置分布,通常被分为两类,即单基合成孔径雷达和双基合成孔径雷达。单基sar的发射机和接收机位于同一飞行平台上,鉴于系统实现和成像处理相对简单,已经形成了较为成熟的研究体系并被广泛应用在军事和民用领域。而双基sar的发射机和接收机则被安装在不同的平台上,具有不同的空间位置和运动速度,因此其工作原理,成像处理和图像特征与单基sar大相径庭。相比于传统单基sar,双基sar由于收发分离的特征,具有多方面的优势,如能够获取更多的目标散射信息,抗干扰性能强以及隐蔽性好等特征。
3.与单基sar系统相比,双基sar系统更为复杂,因此存在多方面的挑战,其中任意构型下的双基成像算法处理和复杂环境下的运动补偿技术是当前研究的重点。根据现有文献,sar成像算法可分为两大类:频域成像算法和时域成像算法。频域成像算法,顾名思义成像过程在频域完成。经典的频域成像算法包括距离多普勒算法(rd)和距离徙动算法(rma)。由于频域算法具有较高的运算效率,往往在实际sar系统中广为应用。然而,双基sar系统的复杂特性导致双基sar回波数据的处理难度也随之提高,很难准确推导出任意几何构型下双基sar的频谱解析表达,极大影响了双基频域算法的成像性能。相比于频域成像算法,时域成像算法的成像过程是在时域进行,无需考虑频谱的具体解析表达式,因此更适用于双基sar成像。作为频域算法的典型代表,滤波反投影(fbp)算法由于不受sar构型和飞行路径的限制,具有较强的非线性运动补偿能力,被认为是通用双基sar成像的首选算法。
4.众所周知,在sar成像过程中,图像的质量不仅取决于成像算法本身的精确度,还依赖于平台运动测量单元提供的位置信息。但在双基sar成像中,运动测量单元提供的位置信息往往无法满足精确聚焦成像的需求,因此需要在双基sar处理中加入自聚焦处理以确保所得图像的质量。不准确的平台路径测量导致所得回波数据中含有误差,误差可以分为两类,即方位相位误差(ape)和残留距离徙动(rcm)。当rcm相对较小时,我们只需要使用一维自聚焦方法对ape进行估计和补偿。经典的一维自聚焦方法有相位梯度自聚焦(pga)和mapdrift(md)。然而,成像过程中,图像域与空间频域存在傅里叶变换关系是使用这些一维自聚焦算法的先决条件。对于双基fbp算法,成像只在时域进行,其图像域与空间频域是否存在傅里叶变换关系尚不清楚,因此无法使用这些经典高效的一维自聚焦方法。此外,随着所需双基sar fbp图像分辨率的提高,残留rcm严重影响图像的质量,如何进行两维相位误差估计和补偿,实现双基sar fbp图像的两维自聚焦是双基sar成像当前应重点解决的问题。
5.现有双基sar两维相位误差的估计和补偿方法可以划分为两类。在第一类方法中,
两维相位误差被认为是完全未知的,通过对误差参数进行盲估计获得两维相位误差结果,该方式实现思路简单但在计算效率和参数估计精度方面具有较大的限制。第二类方法则认为一维方位相位误差和两维相位误差之间存在一定的关系,通过对成像算法的新解释,推导得到残留两维相位误差的固有解析结构,将两维相位误差的估计降维成一维方位相位误差的估计。但是,根据现有文献,第二类方法只被应用于双基sar极坐标格式图像的两维自聚焦处理。由于未知双基sar fbp成像过程中是否含有傅里叶变换关系,双基sar fbp图像的空间频谱特性以及残留两维相位误差的解析结构特征,因此该方法无法直接用于双基sar fbp两维自聚焦处理。
技术实现要素:
6.进行双基sar fbp成像时,受到测量或者空气传播扰动,回波数据中会引入相位误差。随着图像分辨率的提高,自聚焦处理时,无法忽视残留rcm的影响,因此需要进行两维相位误差估计和补偿。现有双基sar fbp自聚焦算法在计算效率和估计精度两方面依旧存在较大限制。为解决上述问题,本发明提出一种基于参数化模型的双基sar滤波反投影两维自聚焦方法。
7.一种基于参数化模型的双基sar滤波反投影两维自聚焦方法,包括以下步骤:
8.步骤1:对双基sar fbp图像的频谱进行预处理;所述预处理过程包含两步:
9.11)消除频谱距离混叠;
10.12)校正频谱方位偏移;
11.步骤2:通过降维处理,实现双基sar fbp图像的两维相位误差的准确估计;
12.21)首先采用pga进行一维方位相位误差估计;
13.22)然后基于双基sar fbp相位误差解析结构,利用一维方位相位误差的估计值直接计算得到两维相位误差的估计值;
14.步骤3:进行相位补偿,得到聚焦良好的双基sar fbp图像。
15.进一步的,步骤11)所述消除频谱距离混叠具体为:
16.输入双基sar fbp图像f(x,y),构造函数f1(x,y),并将函数f1(x,y)与图像f(x,y)相乘,从而消除双基sar fbp图像频谱距离维度的混叠;函数f1(x,y)的表达式如下:
17.f1(x,y)=exp{jyk
yc
}
18.其中,(x,y)是成像场景网格划分后每个像素点的坐标,k
yc
为距离空间频率的常数项,j是虚数单位。
19.进一步的,步骤12)所述校正频谱方位偏移具体为:
20.将步骤11)处理后的图像数据f(x,y)进行距离向傅里叶变换,得到f(x,ky),然后构造函数f2(x,ky),并与f(x,ky)相乘实现频谱方位偏移校正;函数f2(x,y)的表达式如下:
[0021][0022]
其中,y
t
(0)和yr(0)分别是发射机和接收机在慢时间t=0时的坐标,ky为距离空间频率。
[0023]
进一步的,步骤21)所述一维方位相位误差估计具体为:
[0024]
首先对步骤1预处理后的结果进行中心子带数据截取,重构双基sar fbp粗糙图像;
[0025]
然后,利用相位梯度自聚焦算法,对重构图像进行方位相位误差估计,所得结果即视为原双基sar fbp图像的一维方位相位误差,表示为φ0(k
x
),k
x
为方位空间频率。
[0026]
进一步的,步骤22)所述两维相位误差的计算方法具体为:
[0027]
获取一维方位相位误差估计结果后,利用推导得到的两维相位误差结构εe(k
x
,ky),通过尺度变换,即φ0(k
x
)映射出然后与系数相乘,求解得到两维相位误差;所述两维相位误差结构的公式如下:
[0028][0029]
其中,φ0为一维方位相位误差,k
x
为方位空间频率,ky为距离空间频率,k
yc
为距离空间频率的常数项。
[0030]
进一步的,步骤3所述相位补偿具体为:
[0031]
在波数域,将计算得到的两维相位误差exp[jεe(k
x
,ky)]与步骤1中频谱预处理后所得结果相乘,然后利用两维逆傅里叶变换将波数域中的数据转换至图像域,最终得到聚焦良好的双基sar fbp图像。
[0032]
与现有技术相比,发明的一种基于参数化模型的双基sar滤波反投影两维自聚焦方法的优势在于:
[0033]
该方法在不改变传统sar fbp成像算法实现步骤的前提下,通过对双基sar fbp算法进行重新解释,揭示了双基sar fbp成像过程中图像域与空间频域存在傅里叶变换。基于新解释,对双基sar fbp频谱特性进行分析,采用频谱预处理,消除频谱距离向模糊和校正频谱方位向频移。并根据残留两维相位误差解析结构,采用降维处理,在空间频域实现两维相位误差的估计和补偿,最终得到聚焦良好的双基sar fbp图像。综上所述,所提方法在实际处理中具有较好的鲁棒性和广泛的应用前景。
附图说明
[0034]
图1是双基聚束模式sar数据采集几何模型;
[0035]
图2是双基sar fbp图像频谱距离混叠示意图;
[0036]
图3(a)是点目标b的成像场景;
[0037]
图3(b)是点目标b对应的频谱支撑区域;
[0038]
图4(a)是不同坐标系下的双基聚束模式sar数据采集几何模型;
[0039]
图4(b)是不同坐标系下的频谱图;
[0040]
图4(c)是不同坐标系下的距离压缩图;
[0041]
图5是仿真数据采集几何模型;
[0042]
图6(a)是发射机的轨迹偏差;
[0043]
图6(b)是接收机的轨迹偏差;
[0044]
图7(a)是双基sar fbp的点目标成像结果;
[0045]
图7(b)是图7(a)对应的距离压缩图;
[0046]
图8(a)是图7(a)的频谱图;
[0047]
图8(b)是频谱距离混叠消除后的频谱图;
[0048]
图8(c)是频谱方位偏移校正后的频谱图;
[0049]
图9(a)是两维自聚焦处理后的点目标结果图;
[0050]
图9(b)是图9(a)对应的距离压缩图;
[0051]
图10(a)是图9(a)中t1的点目标响应;
[0052]
图10(b)是图9(a)中t2的点目标响应;
[0053]
图10(c)是图9(a)中t3的点目标响应;
[0054]
图10(d)是图9(a)中t4的点目标响应;
[0055]
图10(e)是图9(a)中t5的点目标响应;
[0056]
图11是场景散射系数;
[0057]
图12(a)是双基sar fbp面目标成像结果;
[0058]
图12(b)是图12(a)对应的距离压缩图;
[0059]
图12(c)是图12(b)红色方框内的放大图;
[0060]
图13(a)是两维自聚焦处理后的面目标结果图;
[0061]
图13(b)是图13(a)对应的距离压缩图;
[0062]
图13(c)是图13(b)红色方框内的放大图;
[0063]
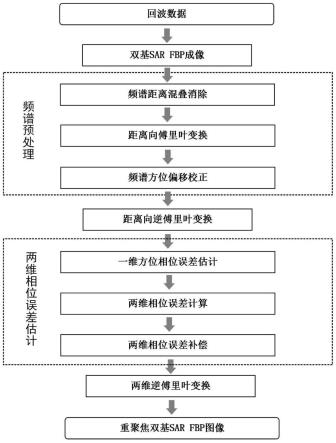
图14是基于参数化模型的双基sar滤波反投影两维自聚焦方法流程图。
具体实施方式
[0064]
下面结合附图,对本发明提出的一种基于参数化模型的双基sar滤波反投影两维自聚焦方法进行详细说明。
[0065]
图1是双基聚束模式sar数据采集几何模型,以坐标原点为成像场景中心建立xoy平面。不失一般性,假定发射机和接收机的飞行路径是任意的,变量τ和t分别代表快时间和慢时间,发射机和接收机apc的瞬时位置分别表示为(x
t
(t),y
t
(t))和(xr(t),yr(t))。假设成像场景中存在点目标p为(x
p
,y
p
),则场景的反射函数为g(x,y)=δ(x-x
p
,y-y
p
)。
[0066]
假设雷达发送的信号是线性调频信号,经过解调,回波信号可以表示为
[0067][0068]
其中
[0069][0070]rpt
(t)和r
pr
(t)分别是目标到发射机相位中心和接收机相位中心的瞬时距离。c是电磁波在真空中传播的速度,fc为雷达中心的载波频率,k是线性调频率。为了简化表达,回波信号的表达式中忽视了非必要的幅度效应。
[0071]
经过距离向脉冲压缩后,两维回波信号可以简化为
[0072][0073]
其中b是发射信号的带宽。
[0074]
将成像场景进行网格划分,假设某个像素点的坐标为(x,y),则发射机和接收机相位中心到这个像素点的距离和为
[0075][0076]
基于该距离表达式,可以计算出这一像素对应的距离压缩脉冲数据为s(t,2r(t)c)。经过多普勒相位校正处理及对所得的数据进行相干累加这些步骤后,最终产生的反投影图像为
[0077][0078]
其中,t是脉冲合成孔径时间。
[0079]
将式(3)代入式(5)可得:
[0080][0081]
根据傅里叶变换关系,式(5)中的sinc函数可以等效于
[0082][0083]
其中,fr是距离频率。将式(6)代入式(5)中,式(5)为
[0084][0085]
其中,kr=2π(fc fr)/c,k
rc
=2πfc/c,δkr=2πb/c。为了精确构建场景的反射函数,我们通常会在回波信号反向投影之前对回波信号进行滤波,构建的滤波函数为kr,最终双基fbp图像可以表示为
[0086][0087]
基于图1所示的双基sar几何模型,可对式(8)中的差分距离表达式在点目标坐标处泰勒展开,近似为
[0088]
r(t)-r
p
(t)≈(x
p-x)(sinθ
t
sinθr) (y
p-y)(cosθ
t
cosθr)
ꢀꢀꢀ
(9)
[0089]
其中,θ
t
和θr的具体表达式分别为
[0090][0091]
式(9)代入式(8)后,可以得到
[0092]
[0093]
令k
x
=kr(sinθ
t
sinθr),ky=kr(cosθ
t
cosθr),式(11)简化为
[0094][0095]
此时,可以发现,在空间频率域,笛卡尔坐标和极坐标存在的关系如下所示
[0096][0097]
将式(10)与式(13)联立,可以得到θ关于t的表达式,即
[0098][0099]
如式(14)所示,θ和t之间存在一一对应的关系,那么可以定义t关于θ的表达式为t=g(θ)。对该函数进行求导,可得关系式dt=g
′
(θ)dθ,则(12)可以表示为
[0100][0101]
其中,θ
start
和θ
end
分别是是合成孔径开始和结束时的瞬时双基角θ。利用k
x
,ky和kr之间的关系,式(15)在极坐标系下的表达式可以转换为直角坐标下的表达式,表示为
[0102][0103]
其中,变量d是两维积分区间。
[0104]
对式(16)进行两维傅里叶变换后,可得场景反射函数g(x,y)的频谱表达式,即
[0105][0106]
根据上述公式推导,可以确定,在双基sar fbp的成像过程中,存在极坐标到直角坐标的转换,空间频域与图像域之间的数据转换含有傅立叶变换这一过程。
[0107]
基于双基sar fbp成像算法的新解释,可知空间频域与图像域之间存在傅里叶变换关系。利用该关系,我们可以将双基sar fbp图像转换到空间频域,进行频谱特征分析。
[0108]
在频域算法中,我们通常采用两维傅里叶变换实现图像域与空间频域之间的转换。然而,如果直接对双基sar fbp图像进行两维傅里叶变换(fft)处理,所得频谱将在距离维度混叠,方位维度空变。具体原因见下述分析。
[0109]
频谱距离向混叠的主要原因是在距离向fft过程中,忽略了距离空间频率上的常数项k
yc
。根据双基sar fbp经典解释,实际成像过程是通过计算时间延迟将对应的信号进行相干累加并求和,实现空间频域至图像域的转换。在距离维度,频谱数据转换成为图像的过程具体表示为
[0110][0111]
其中,距离空间频谱变量k是由基带频率变量和非零常数项k
yc
构成,即如果直接对双基sar fbp图像进行距离向fft变换重构频谱,则忽视了非零常数项k
yc
,具体过程用函数表示为。
[0112][0113]
比较式(18)和(19)可知,由于距离向上非零常数项的存在,实际成像时的相干累加和求和步骤并不能完全等效于距离向上的ifft,因此距离fft重构的频谱与真实频谱存在差异。通常,非零常数项k
yc
远大于距离向采样频率k
ys
,因而对双基sar fbp图像距离向进行fft处理后,频谱存在距离向上的混叠,如图2所示。
[0114]
两维fft处理后,重构的双基sar fbp频谱不仅距离向存在混叠现象,方位维度还存在一定偏移,偏移量与点目标的方位位置相关。对双基角θ在目标点p坐标处进行泰勒展开,近似为
[0115][0116]
其中
[0117]
γ
t
(t)=x
t
(t)/y
t
(t),γr(t)=xr(t)/yr(t)
ꢀꢀꢀ
(21)
[0118]
在大多数情况下,在大多数情况下,因此,θ的表达式可以简化为
[0119][0120]
从式(22)中可得,极角θ与点目标的方位位置坐标线性相关。也就是说,对于不同坐标位置的点目标,对应的极角各不相同。如图3所示,尽管不同点目标的频谱支撑区域形状面积相同,但不是完全重叠,在方位维度存在一定的偏移。
[0121]
实际成像时,受到测量和传播介质扰动的影响,发射机/接收机的相位中心到场景每个像素的真实距离与理论距离存在一定的误差,表示为r
et
(t)r
et
(t),定义re(t)=r
et
(t) r
et
(t)。因而,实际图像的解析表达式为
[0122][0123]
式(23)可知,两维相位误差在相位历史域中的表达式为
[0124]
εe(t,kr)=krre(t)
ꢀꢀꢀ
(24)
[0125]
将式(9)代入式(23)后,可得
[0126][0127]
依据前文分析,变量t和θ存在一一映射的关系,并且双基角θ和k
x
/ky的比值之间也存在着一一对应的关系。根据变量的传递性,则变量t和k
x
/ky之间必然也存在一一映射关系。因此,可以用变量k
x
/ky表示函数re(t),即re(t)ζ=(k
x
/ky)。同理,根据距离频率变量ky的定义,可得kr=ky/(cosθ
t
cosθr),由于θ和k
x
/ky的比值存在一一对应关系,则极径kr的解析式也可用变量k
x
和ky表示,即kr=kyξ(k
x
/ky)。
[0128]
通过上述变量替换,式(25)可以表示为
[0129][0130]
为了便于分析,定义ψ(k
x
/ky)=ξ(k
x
/ky)
·
ζ(k
x
/ky),则式(26)简化为
[0131][0132]
根据式(26)的表达式可知,在波数域,双基sar fbp图像的两维相位误差结构为
[0133]
εe(k
x
,ky)=kyψ(k
xky
)
ꢀꢀꢀ
(28)
[0134]
相比于两维相位误差在相位历史域的解析结构,表达式在波数域更为复杂。通过对式(28)在距离空间频率k
yc
处进行泰勒展开,可得
[0135]
εe(k
x
,ky)=φ0(k
x
) φ1(k
x
)(k
y-k
yc
) φ2(k
x
)(k
y-k
yc
)2
…
(29)
[0136]
其中
[0137][0138]
式(30)中,ψ
′
(k
xkyc
)和ψ
″
(k
xkyc
)分别是函数ψ(k
xkyc
)的一阶和二阶导数。φ0(k
x
)为ape,φ1(k
x
)为残留rcm,φ2(k
x
)和其余高阶项与图像距离散焦有关。通过观察式(30),可以求得ape和两维相位误差之间的关系,表示为
[0139][0140]
根据式(31)中的解析结构,两维相位误差的估计可以通过降维处理实现,即先进行一维ape的估计,然后利用解析结构,对一维ape进行尺度变换,便可计算得到两维相位误差结果。
[0141]
依据两维相位误差的估计思路,在双基sar fbp图像两维自聚焦处理中,首先需要进行一维ape估计。由于相位梯度算法(pga)的高效性,我们通常采用pga对图像进行一维ape估计。然而,众所周知,相位误差的空不变性是使用pga准确估计图像一维ape的前提条件。基于双基sar fbp频谱特征,频谱支撑区域存在方位位置的偏移,因此在估计一维ape前,需要对双基sar fbp图像的频谱处理,实现方位频谱对齐。而两维相位误差的计算,则是利用已知两维相位误差的解析结构,通过对估计的一维ape结果进行尺度变换和系数相乘计算得到实现。由于两维相位误差的计算与距离频率变量ky有关,因而双基sar fbp图像频谱距离维存在的混叠现象必然会影响两维相位误差计算的准确性。为此,在进行相位误差估计之前,需要对频谱进行预处理,消除频谱距离维度的混叠。
[0142]
综上所述,为了确保所提两维自聚焦方法能够准确高效重聚焦双基sar fbp图像,需要对双基sar fbp图像的频谱进行预处理。预处理过程包含两步:消除频谱距离混叠和校
正频谱方位偏移。
[0143]
频谱预处理第一步为消除距离混叠。根据前文分析可知,频谱距离维度混叠是因为在距离fft处理时,忽略了距离向的非零常数项k
yc
。为了避免该问题,我们可以构造校正函数f1(x,y),对图像域进行相位校正,使整个频谱支撑区域沿距离向频移至基带范围内,校正函数的具体表达式为:
[0144]
f1(x,y)=exp{jyk
yc
}
ꢀꢀꢀ
(32)
[0145]
频谱预处理第二步为校正频谱方位偏移。这一步骤的关键是求取频谱支撑区域的具体偏移量。根据双基sar fbp算法的新解释,相位误差从相位历史域(t,kr)至空间频域(k
x
,ky)的过程可以分为两步,即
[0146][0147]
由于相位误差估计和补偿是在空间频域进行的,因此我们更在意不同点目标的相位误差在空间频域的关系。假设存在两个点目标a和点目标b,a位于坐标原点,b则是场景中的任意一点,坐标为(xb,yb)。由式(24),这两个点目标在相位历史域中的两维相位误差分别为和并且两者之间的关系为经过成像处理,两维相位误差被映射到空间频域。由于点目标的方位坐标不同,此时,两个点目标的两维相位误差不再相等,两者的关系为
[0148][0149]
其中,通常,点目标方位坐标xb远小于发射机和接收机在t=0时刻的距离坐标值y
t
(0)和yr(0),因而θd的值可以近似为0,则式(34)中两维相位误差的关系式可以简化为
[0150][0151]
式(35)表明,虽然在相位历史域,不同点目标的两维相位误差可以近似相等,但在空间频域内,不同点目标的两维相位误差将不再相同,存在方位维度的偏移,频移量为:
[0152][0153]
在频谱预处理中,我们可以在时域-距离频域上乘上校正相位函数进行频谱支撑区域方位向的对齐。校正相位函数与偏移量之间的关系如下
[0154][0155]
通过对偏移量δk
x
进行积分,可得的具体表达式
[0156][0157]
最终,校正函数f2(x,ky)为
[0158][0159]
经过频谱预处理,频谱距离模糊和方位空变已被校正,可以进行两维相位误差的估计。根据前文推导双基sar fbp残留两维相位误差的解析式,两维自聚焦方法的实现分为两步,第一步是采用pga估计图像方位相位误差,第二步则是利用相位误差的解析结构,计算图像的两维相位误差并在空间频域进行相位误差补偿处理。基于该思想,可知两维相位误差的估计精度完全取决于一维ape的估计结果,因此在对图像进行方位相位误差估计时,需要确保所得结果的准确性。
[0160]
由于双基sar fbp是时域精确成像算法,坐标系的选择不会影响图像质量,因此在成像过程中,坐标的建立不受限制。但是,在不同的坐标系统下,图像残留rcm不一样。如果残留rcm过大,跨越多个距离单元门,将会对一维ape的估计结果产生影响。
[0161]
为了分析不同坐标系统下,残留rcm对一维ape估计的影响,我们对式(30)中的φ1(k
x
)进行泰勒展开
[0162]
φ1(k
x
)=a0 a1(k
x-k
xc
) a2(k
x-k
xc
)2 a3(k
x-k
xc
)3 ......
ꢀꢀꢀ
(40)
[0163]
其中,k
xc
是k
x
的偏置项
[0164][0165]
通常,残留rcm的大小主要取决于式(39)中的线性项a1(k
x-k
xc
)。可以推断,当方位空间频率的偏置项k
xc
=0时,残留rcm的值最小。基于上述分析,为了确保残留rcm不影响方位相位误差估计的精度,我们可以在进行双基sar fbp成像处理时,选择一个合适的坐标系统,即方位空间频率的偏置项k
xc
=0时。参考双基sar几何模型,如图4所示,当k
xc
=0时,坐标系的距离坐标轴恰好与双基角的平分线重合。
[0166]
所提自聚焦方法中的两维相位误差估计分为两个步骤,首先采用pga算法进行方位相位误差的估计。为了避免残留rcm的影响,提高ape的估计精度,我们可以对图像进行距离向fft变换处理,然后在距离频域,截取中心子带数据,通过距离向ifft变换得到重构图像,实现距离向分辨率的降低。之后,利用pga算法,估计重构图像的方位相位误差,所得结果即可近似为双基sar fbp图像的方位相位误差。获取一维ape估计结果后,利用推导得到的两维相位误差结构,通过尺度变换和系数相乘,可以直接从ape估计结果中计算得到两维相位误差,并在波数域进行相位误差校正,最终利用两维ifft将波数域中的数据转换至图像域,得到聚焦良好的双基sar fbp图像。
[0167]
利用本发明提出的一种基于参数化模型的双基sar滤波反投影两维自聚焦方法对点目标和面目标分别进行仿真实验,以此验证所提方法的有效性和可靠性。仿真所涉及的参数如表1所示。
[0168]
表1仿真实验涉及到的主要参数
[0169][0170]
首先进行点目标仿真实验。如图5所示,在成像场景中,放置五个不同位置的点目标。为了模拟真实的成像环境,我们在飞机轨迹中加入了三维扰动,三维扰动量如图6所示。通过旋转原坐标,选择合适的坐标系,对雷达数据进行双基sar fbp成像,成像结果如图7(a)所示,可以清楚地看到双基sar fbp图像中五个点目标存在严重散焦。图7(b)为距离压缩图像,可以明显看出,残留rcm跨越多个距离门。为获得聚焦良好的图像,需要对图7(a)进行两维自聚焦处理。根据所提方法的处理步骤,首先进行频谱预处理。图8(a)是双基sar fbp图像的频谱图,可见双基sar fbp图像的频谱存在距离混叠和方位偏移,因此不能对图7(a)直接使用所提方法进行两维自聚焦处理。图8(b)为消除距离混叠后的频谱图,图8(c)则是校正方位偏移后的频谱图。经过频谱预处理后,可以利用所提方法进行两维相位误差的估计和补偿。图9(a)是两维自聚焦后的结果,可以看到图中五个点目标已经得到了良好的聚焦。此外,图9(b)为对图9(a)进行方位向fft所得的距离压缩图,图中残留rcm已被完全消除。图10为图图9(a)中五个点目标的目标相应,可以看出所有点目标都得到了良好的聚焦。
[0171]
为了更好地验证所提两维自聚焦方法的有效性,我们还进行了面目标仿真验证。采用图11所示的一幅单基sar图像作为场景目标的散射系数,进行双基sar回波信号构造,从而进行面目标仿真。与点目标仿真相同,在飞机航迹中加入了一定的扰动,成像结果如图12所示,方位和距离两个维度存在严重的散焦。图13是所提方法处理后的结果,图中的散焦依据得到了处理,并且距离压缩图中也没有残留rcm。综上所述,本发明提出的一种基于参数化模型的双基sar滤波反投影两维自聚焦方法能够对双基fbp散焦图像的两维相位误差进行准确,高效的估计,适用于任何几何构型,在计算效率和精度方面都具有明显的优势。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。