一种crt屏锥玻璃自动智能拆分及荧光粉吸附回收装置与回收方法
技术领域
1.本发明属于阴极射线管(crt)回收技术领域,涉及一种自动智能拆解装置与方法,特别涉及一种智能无人工crt屏锥玻璃自动智能拆分及荧光粉自动吸附回收资源化装置与方法。
背景技术:
2.阴极射线管(crt)因其在显示领域具有可靠性高、寿命长、加工技术成熟等优点,被广泛应用于电视机、示波器、电脑监视器等,其也是工业化生产最早且应用最为广泛的显示技术。随着显示技术的进一步发展,在20世纪90年代,crt显像管逐渐被lcd液晶显示器所取代。自2003年开始,大量的crt进入报废期。据统计,2008年至2016年报废crt将达到高峰期,每年产生量在4000~5000万台。除此之外,发达地区如欧美等地的报废crt也会通过非法途径进入我国,报废crt的量进一步增大。
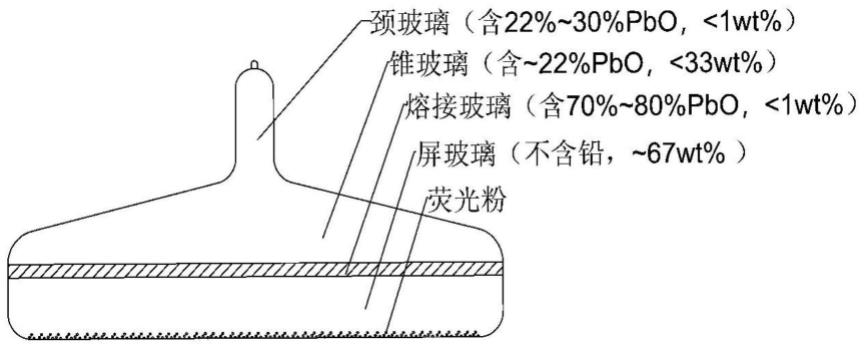
3.废旧crt主要有三部分组成,分别为屏玻璃,锥玻璃,以及颈玻璃,三者通过低熔点焊剂焊接到一起。其中屏玻璃不含铅等污染物,而锥玻璃,以及颈玻璃含有硅、铅、钠、钾、铝、镁和钙等成分的氧化物,是由玻璃以及这些氧化物构成的熔体。为了减少crt显像管的x射线辐射,锥玻璃添加的氧化铅含量约为22%,颈玻璃添加的氧化铅含量大约为22%~30%。废旧crt不仅含有重金属铅,同时还含有锶、锑、钡等重金属元素,已经被列入《国家危险废物名录》中。因此,如果对废旧crt处置不当,如传统填埋等,释放出来的铅等重金属会造成土壤和水体的污染,而后进过食物链食物网等,在生物体逐渐累积与富集,最终将会对环境以及人身健康造成潜在的风险与安全隐患。
4.另一方面,废旧crt也有其资源化利用的潜质。crt是电视机以及电脑显示器中最大的部件,约占此类设备总质量的2/3,其中玻璃占crt总质量的85%。其中不含铅的屏玻璃占总玻璃的重量约67wt%,颈玻璃约1wt%,锥玻璃33wt%。由此可知,不含污染的屏玻璃占相当大的比重,如果能将屏玻璃以及锥玻璃颈玻璃分离,分别回收将具有重大意义。屏玻璃可以用于制作泡沫玻璃、烧结型建材制品及玻璃陶瓷的原料,而含铅量较高的锥玻璃则可以通过新技术获得再生铅资源,从而最终实现经济、社会与生态环境效益的协调发展。
5.就目前而言,还没有形成一种成熟的crt回收技术。对crt的拆解大多靠人工,如crt的卸货、上线,防爆带切割、屏锥玻璃拆分及荧光粉清理都需要靠人工。劳动强度高,生产效率低,且部分拆解工序不利于人体健康。随着人们对生态环境及人身工作环境的重视,使用设备替代人工,开发一种更为科学、高效、安全的crt回收技术显得尤为重要。
技术实现要素:
6.本发明所要解决的技术问题在于,针对crt回收过程中现有技术的不足如过多依赖于人工,生产效率低,人工成本高,工位环境差等,公开了一种废旧crt显示器的智能综合拆解系统以及回收方法,其可以智能精细化拆解crt显示器,同时可实现屏玻璃内壁荧光粉
的自动吸附回收。
7.为了解决上述技术的不足,本发明采用的技术方案是:废旧crt显示器智能综合拆解系统,包括crt屏锥玻璃自动智能拆分及荧光粉吸附回收装置与回收方法。
8.本发明回收装置主要包含了工作平台、搬运机器人、视觉相机检测系统、防爆带智能拆解程序、屏锥玻璃拆分机构、锥玻璃吸取下料机构、荧光粉吸附清理机构。
9.所述工作平台包括:可伸缩可升降传输线、伸缩滚筒装车机、真空吸盘固定装置。
10.其中,可伸缩可升降传输线用以减少人工搬运;伸缩滚筒装车机用以crt高效率上货卸货;配合crt后续拆解装置位点的真空吸盘固定装置,其可调整并适应不同大小的crt。
11.所述搬运机器人包括:手臂、视觉相机、3d定位系统。crt屏锥玻璃搬运采用6轴50kg标准机器人,工作范围2150mm,采用落地式安装。采用接口为usb3.0 db9(rs232)视觉相机检测系统,视野范围为640
×
470
×
480mm-950
×
670
×
720mm,工作距离为800-1200mm,输出结果为空间三维坐标及姿态信息x,y,z,a,b,c。
12.所述视觉相机检测系统可检测并定位crt。
13.所述防爆带智能拆解程序包括剪切机构、防爆带夹取下料机构。所述剪切机构包括气缸/电缸移载机构、切割机、切割推进机构;所述防爆带夹取下料机构包括下料机构、防爆带夹取机构。
14.所述屏锥玻璃拆分机构包括:加热丝到位拉紧机构及三维电缸模组。
15.其中加热丝到位拉紧机构由三维模组移栽机构、加热丝拉紧机构、电热丝智能控制器构成。所述三维模组移动机构到达指定位置,电机拉紧加热丝加热屏玻璃锥玻璃结合处,加热丝拉紧机构通过电机带动将电热丝拉紧,可根据屏幕大小调整电热丝拉紧程度,避免过度消耗电热丝以及未贴紧情况。其中三维电缸模组由x、y、z三轴电缸组成,三维电缸模组带动调整加热丝高度位置到达锥玻璃屏玻璃分离位置高度,可根据屏幕尺寸不同、需求加热位置不同调整加热丝高度。
16.所述锥玻璃吸取下料机构包括:浮动机构、真空吸机构。
17.其中,利用真空吸机构与浮动机构吸附锥玻璃下料,并将其放置在回收输送线上。浮动机构可针对不同尺寸外形的锥玻璃调整角度位置进行吸附。
18.所述荧光粉吸附清理机构包括:电机、真空吸尘管路(工业吸尘器)、除尘刷及视觉相机检测系统。
19.其中,电机带动除尘刷旋转清扫屏玻璃表面、边角的荧光粉,同时真空吸尘管路连接工业吸尘器,所述工业吸尘器为大功率吸尘器,视觉相机检测系统可检测荧光粉是否被清理完成,并辅助系统判断下一步指令。
20.基于以上装置,本发明还提出了一种回收方法方法,包括以下步骤:
21.步骤1:显像管经由搬运机器人手臂,在机器人3d定位系统的引导下,从货垛自动抓取crt并将其搬运至工作平台,视觉相机检测系统检测并定位crt后,启动防爆带智能拆解程序。
22.步骤2:该工序完成后,视觉相机检测系统重新检测并定位crt后,屏锥玻璃拆分机构将屏玻璃与锥玻璃进行初步分离。
23.步骤3:该工序完成后,防爆带智能拆解程序启动锥玻璃吸取下料机构,将屏锥玻璃拆分,并将锥玻璃放置在下一步回收输送线上。
24.步骤4:而后系统启动荧光粉吸附清理机构,对工作平台上的屏玻璃内壁上的荧光粉进行吸附回收处理,从而将荧光粉从屏玻璃上去除,以实现屏玻璃的资源化回收。
25.本发明的优选实施方式和进一步改进的点如下:
26.(1)所述防爆带智能拆解程序,其主要由剪切机构(气缸(电缸)移载机构、切割机、切割推进机构)及防爆带夹取下料机构(下料机构、防爆带夹取机构)构成。
27.其工作程序如下。
28.1.电视机由传输线流转至此工位。
29.2.到位检测、固定。具体包括:检测crt到位后,启动配合crt后续拆解装置位点的真空吸盘固定装置,所述真空吸盘固定装置利用真空吸盘吸附在crt的屏玻璃上,从而将crt固定。
30.3.剪切机构到位剪切防爆带。具体包括:气缸/电缸移载机构带动切割机到达切割位置,切割推进机构气缸推进切割机,对防爆带进行切割;
31.4.防爆带夹取下料机构将防爆带拆除,具体包括:夹爪,即防爆带夹取机构夹取切断后的防爆带,下料机构带动夹爪将防爆带下料,并放置回收箱内。
32.5.拆解后各机构复位。
33.6.荧屏向下移拆解工位流走。
34.其中,传感器负责检测工件有无上料以及工件到位检测,采用轮廓(相机)传感器检测crt屏幕尺寸大小。
35.(2)所述屏玻璃与锥玻璃进行初步分离,其主要由加热丝到位拉紧机构(三维模组移栽机构、加热丝拉紧机构、电热丝智能控制器)及三维电缸模组组成。
36.其工作程序如下。
37.1.荧屏流转到此工位。
38.2.到位检测、固定。检测crt到位后,启动配合crt后续拆解装置位点的真空吸盘固定装置,所述真空吸盘固定装置利用真空吸盘吸附在crt的屏玻璃上,从而将crt固定。
39.3.加热丝组立下降,三维电缸模组带动调整加热丝高度位置,到达屏玻璃锥玻璃结合处高度位置。
40.4.加热丝拉紧机构通过点击带动拉紧加热丝。
41.5.启动加热。
42.6.加热丝组立复位。
43.7.振动锤伸出敲击加热处。
44.8.锥玻璃吸取下料机构利用真空吸盘与浮动机构,吸附锥玻璃下料,放置在回收输送线上。
45.9.屏玻璃流向下移吸附清理工位。
46.其中,传感器负责检测工件有无上料,到位检测传感器负责检测工件位置并发出调整指令。
47.(3)所述锥玻璃吸取下料机构,其主要由浮动机构及真空吸机构组成。
48.其利用真空吸盘与浮动机构吸附锥玻璃下料,并将锥玻璃放置在回收输送线上。
49.(4)荧光粉吸附清理机构,其主要由电机、真空吸尘管路(工业吸尘器)、除尘刷及视觉相机检测系统组成。
50.其工作程序如下。
51.1.屏玻璃流转到此工位。
52.2.到位检测、固定。检测crt到位后,启动配合crt后续拆解装置位点的真空吸盘固定装置,所述真空吸盘固定装置利用真空吸盘吸附在crt的屏玻璃上,从而将crt固定。
53.3.真空吸尘管路下降到位。
54.4.电机带动除尘刷旋转清扫屏玻璃表面、边角的荧光粉,同时真空吸尘管路72连接大功率吸尘器开始吸尘。
55.5.完成吸尘,组立复位。
56.6.加热丝组立复位。
57.7.屏玻璃流向回收输送线。
58.其中,传感器负责检测工件有无上料,到位检测传感器负责检测工件位置并发出调整指令。
59.本发明的有益效果在于:
60.本发明公开了一种crt显像管智能自动屏锥玻璃分离,同时实现屏玻璃内壁荧光粉的自动吸附回收的装置与方法。本发明装置及方法自动化程度高,避免传统人工资源化对人身健康的危害,可以广泛的应用于电视机以及电脑监视器crt的屏锥玻璃自动分离以及荧光粉的自动回收。
附图说明
61.图1为crt显像管结构及各个组成部分成分图。
62.图2为本发明提出的crt屏锥玻璃自动智能拆分及荧光粉吸附回收流程图。
63.图3为本发明防爆带智能拆解程序主要配置及结构说明
–
剪切机构(a),防爆带夹取下料机构(b)。
64.图4为本发明屏玻璃与锥玻璃拆分机构主要配置及结构说明
–
加热丝到位拉紧机构。
65.图5为本发明屏玻璃与锥玻璃拆分机构主要配置及结构说明
–
三维电缸模组(a),锥玻璃吸取下料机构(b)。
66.图6为本发明荧光粉清理主要配置及结构说明
–
荧光粉吸尘旋转清扫机构。
67.图7为本发明搬运机器人的手臂示意图。
68.图8为本发明搬运机器人的视觉相机示意图。
69.其中,
70.手臂21、视觉相机22
71.防爆带智能拆解程序4:剪切机构41、气缸/电缸移载机构411、切割机412、切割推进机构413、防爆带夹取下料机构42、下料机构421、防爆带夹取机构422
72.加热丝到位拉紧机构51、三维模组移栽机构511、加热丝拉紧机构512、三维电缸模组52
73.锥玻璃吸取下料机构6、浮动机构61、真空吸机构62
74.荧光粉吸附清理机构7、电机71、真空吸尘管路72、除尘刷73
具体实施方式
75.结合以下具体实施例和附图,对发明作进一步的详细说明。实施本发明的过程、条件、实验方法等,除以下专门提及的内容之外,均为本领域的普遍知识和公知常识,本发明没有特别限制内容。为了使本发明技术方案、优点及发明目的更加明了,以下结合附图以及实施案例,对本发明进一步详细说明。此处所描写的具体实施案例,仅仅用以解释本发明,并不限定本发明。
76.如图2所示,本发明提出的crt屏锥玻璃自动智能拆分及荧光粉吸附回收流程图。其主要的流程为显像管经由搬运机器人手臂21,在机器人3d定位系统的引导下,从货垛自动抓取crt并其将搬运至工作平台,视觉相机检测系统检测并定位crt后,启动防爆带智能拆解程序4。该工序完成后,视觉相机检测系统重新检测并定位crt后,屏锥玻璃拆分机构将屏玻璃与锥玻璃进行初步分离,该工序完成后,程序启动锥玻璃吸取下料机构6,将屏锥玻璃拆分,并将锥玻璃放置在下一步回收输送线上。而后系统启动荧光粉吸附清理机构7,对工作平台上的屏玻璃内壁上的荧光粉进行吸附回收处理,从而将荧光粉从屏玻璃上去除,以实现屏玻璃的资源化回收。
77.图3为防爆带智能拆解程序4主要配置及结构说明
–
剪切机构41(a),防爆带夹取下料机构42(b);电视机塑料外壳拆解后,拆分线束、显像管分类回收,由设备进行防爆带剪切,并对防爆带拆除,放入回收箱内。利用轮廓(相机)传感器检测屏幕尺寸大小以及防爆带的位置,从而发出crt位置调整的指令。
78.crt位置调整到合适的位置后,程序启动防爆带智能拆解剪切机构41(图3a),气缸/电缸移载机构411带动切割机412到达切割位置,切割推进机构413气缸推进切割机412,对防爆带进行切割。而后程序启动防爆带夹取下料机构42(图3b),夹爪夹取切断后的防爆带,下料气缸带动夹爪将防爆带下料,并回收至回收箱内。其关键在于,剪切机构41可以据电视机屏幕尺寸大小,进行切割位置调整,确保防爆带切割过程,屏幕玻璃完整不受破坏。防爆带夹取下料机构42可以针对防爆带位置大小高度有所调整,可对夹爪进行快换以适应不同尺寸防爆带。
79.图4位屏玻璃与锥玻璃拆分机构主要配置及结构说明
–
加热丝到位拉紧机构51。电视机屏玻璃与锥玻璃拆分现大多为人工拉紧加热丝进行加热,本发明由设备带动加热丝到达锥玻璃屏玻璃结合处,拉紧加热丝使之贴紧玻璃,加热完成分离,并由设备吸取锥玻璃下料至回收线。其关键在于,加热丝拉紧机构512通过电机带动将电热丝拉紧,可根据屏幕大小调整电热丝拉紧程度,避免过度消耗电热丝以及未贴紧情况。电热丝加热产生的烟雾可由烟雾收集器进行回收。
80.图5位屏玻璃与锥玻璃拆分机构5主要配置及结构说明
–
三维电缸模组52(a),锥玻璃吸取下料机构6(b)。三维电缸模组52(图5a)由x、y、z三轴电缸组成,电缸是将伺服电机与丝杠一体化设计的模块化产品,将伺服电机的旋转运动转换成直线运动。三维电缸模组52带动调整加热丝高度位置,到达锥玻璃屏玻璃分离位置高度。锥玻璃吸取下料机构6(图5b)利用真空吸盘62与浮动机构61,吸附锥玻璃下料,放置在回收输送线上。其关键在于,三维电缸模组52可根据屏幕尺寸不同、需求加热位置不同调整加热丝高度。锥玻璃吸取下料机构6可针对不同尺寸外形的锥玻璃调整角度位置进行吸附。
81.图6为荧光粉吸附清理机构7主要配置及结构说明
–
荧光粉吸尘旋转清扫机构。其
主要由电机71、真空吸尘管路72、除尘刷73。由电机71带动除尘刷73旋转清扫屏玻璃表面、边角的荧光粉,同时真空吸尘管路72连接大功率吸尘器。其关键在于可配组合清理刷,旋转刷与固定刷组合进行清理工作。
82.本发明的保护内容不局限于以上实施例。在不背离发明构思的精神和范围下,本领域技术人员能够想到的变化和优点都被包括在本发明中,并且以所附的权利要求书为保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。