1.本实用新型涉及一种输液袋的拾取装置。
背景技术:
2.输液是临床常用的医疗方法,通过该医疗方法能够将药液、营养液等液体物质输注到患者体内,以帮助患者康复。当患者需要接受输液等时,经常需要根据病情对多种不同的输液药物进行混合,以调配出具有更好疗效的治疗药液。在临床中,医护人员等可以通过将不同容器例如药瓶中的药物转移至输液袋中进行混合,以得到患者所需的治疗药液。
3.目前,医护人员等通常利用注射器将药瓶中的固体粉末药物与输液袋中的药液混合。例如,当在药瓶与输液袋之间进行混药时,使用注射器先吸取部分输液袋中的药液并注入药瓶中以进行部分混合,随后利用注射器吸取药瓶中的药物与药液的混合物,再利用注射器将混合的药物与药液注入输液袋中充分混合。
4.然而,在上述现有技术中,通常只会在输液袋中容纳部分药液而不会将输液袋装满药液,使得药液的液面距离输液袋的出液口具有一定的距离,在使用尺寸较小(即注射器的针管部分较短)的注射器吸取药液是可能会存在一定的困难。因此,在利用注射器吸取输液袋中的要液时需要手动将输液袋翻转使得药液能够到达输液袋的出液口的附近,从而便于注射器吸取药液。
技术实现要素:
5.本公开是鉴于上述现有技术的状况而提出的,其目的在于提供一种能够能够便于拾取输液袋并且在拾取输液袋后将输液袋翻转以便于获取输液袋中的药液的拾取装置。
6.为此,本实用新型提供了一种输液袋的拾取装置,包括具有容纳腔室的容纳部、以及具有与所述容纳腔室连通的并且具有中空通道的颈部,所述拾取装置包括基座、支承座、设置在所述支承座上的第一夹持部和与所述第一夹持部联动的第二夹持部、以及吸盘,所述支承座通过旋转轴以可旋转的方式设置在所述基座上,所述第一夹持部与所述第二夹持部配合形成与所述颈部相匹配的夹持空间,并且以使所述颈部与所述旋转轴呈预定角度的方式夹持所述颈部,所述吸盘位于所述支承座上相对靠近所述夹持空间的一端并且吸附夹持于所述第一夹持部和所述第二夹持部的输液袋的容纳部。
7.在本实用新型所涉及的拾取装置中,第一夹持部与第二夹持部能够相配合夹持输液袋的颈部以对输液袋进行拾取;在拾取完输液袋后,支承座能够绕旋转轴旋转以将输液袋翻转,使药液能够到达输液袋的颈部上的出液口,从而能够便于注射器获取输液袋中的药液;此外,能够通过吸盘吸附固定输液袋,进而能够能够使输液袋更稳定地翻转。
8.另外,在本实用新型所涉及的拾取装置中,可选地,所述颈部包括并列设置在所述容纳部的端部的第一颈部和第二颈部,所述输液袋还包括设置在所述第一颈部的外周的第一凸缘和设置在所述第二颈部的第二凸缘。在这种情况下,输液袋具有第一颈部和第二颈部,由此能够通过两个不同的颈部实现不同的功能,例如,第一颈部能够用于向容纳腔室中
注入用于混合的药物,第二颈部能够用于向患者输液。
9.另外,在本实用新型所涉及的拾取装置中,可选地,所述第一夹持部包括第一夹持臂和第二夹持臂,所述第二夹持部包括与所述第一夹持臂配合夹持所述第一颈部的第三夹持臂和与所述第二夹持臂配合夹持所述第二颈部的第四夹持臂。由此,能够更稳定地对颈部进行夹持,从而能够更稳定地拾取输液袋。
10.另外,在本实用新型所涉及的拾取装置中,可选地,所述第一夹持部还包括第五夹持臂和第六夹持臂,所述第二夹持部还包括与所述第五夹持臂配合夹持所述第一颈部的第七夹持臂和与所述第六夹持臂配合夹持所述第二颈部的第八夹持臂,所述第一夹持臂和所述第三夹持臂夹持的位置与所述第五夹持臂和所述第七夹持臂夹持的位置分别位于所述第一凸缘的相对两侧,所述第二夹持臂和所述第四夹持臂夹持的位置与所述第六夹持臂和所述第八夹持臂夹持的位置分别位于所述第二凸缘的相对两侧。在这种情况下,能够通过第一夹持部和第二夹持部,对第一颈部中第一凸缘的两侧进行夹持,对第二颈部中第二凸缘的两侧进行夹持,由此,能够更稳定地对颈部进行夹持,从而能够有利于更稳定地拾取输液袋。
11.另外,在本实用新型所涉及的拾取装置中,可选地,还包括驱动机构,所述驱动机构包括滑座、与所述滑座榫槽连接并且固定所述第一夹持部的第一滑块、以及与所述滑座榫槽连接并且固定所述第二夹持部的第二滑块,所述第一滑块与所述第二滑块在所述滑座上相对移动以使所述第一夹持部与所述第二夹持部相对靠近或相互远离以可释放地夹持所述颈部。由此,能够通过驱动机构对第一夹持部和第二夹持部夹持和释放输液袋的操作进行驱动。
12.另外,在本实用新型所涉及的拾取装置中,可选地,还包括位置检测机构,所述位置检测机构包括与所述第一滑块联动并且具有预设检测区域的检测构件、以及具有与所述预设检测区域的移动路径相对应的检测部的第一传感器。在这种情况下,能够通过第一传感器来检测检测构件的预设检测区域以判断第一滑块能够移动至第一夹持部和第二夹持部能够夹持颈部的位置,从而能够及时对第一夹持部无法达到夹持颈部的预设位置的情况进行调整。
13.另外,在本实用新型所涉及的拾取装置中,可选地,所述第一夹持部与所述第二夹持部以使所述颈部正交于所述旋转轴的方式夹持所述颈部。在这种情况下,能够便于支承座带动输液袋旋转以使颈部的出液口朝向下方,进而能够便于获取容纳部中的药液。
14.另外,在本实用新型所涉及的拾取装置中,可选地,还包括设置在所述支承座上并且位于所述第一夹持部与所述第二夹持部之间的限位部,所述第一夹持部、所述第二夹持部、以及所述限位部分别从三个方向抵接所述颈部以夹持所述颈部。由此,能够更稳定地对输液袋进行拾取。
15.另外,在本实用新型所涉及的拾取装置中,可选地,还包括设置在所述支承座上且朝向夹持于所述第一夹持部和所述第二夹持部的输液袋的容纳部的第二传感器。在这种情况下,能够通过第二传感器检测在输液袋被翻转时,容纳部是否被吸盘吸附,从而便于及时对吸盘无法吸附容纳部的情况进行调整。
16.另外,在本实用新型所涉及的拾取装置中,可选地,还包括与所述吸盘连通的真空泵,所述真空泵抽取所述吸盘与所述容纳部之间的空气以在所述吸盘与所述容纳部之间形
成负压。由此,能够通过负压使吸盘更牢固地吸附输液袋。
17.由此,能够提供一种能够能够便于拾取输液袋并且在拾取输液袋后将输液袋翻转以便于获取输液袋中的药液的拾取装置。
附图说明
18.现在将仅通过参考附图的例子进一步详细地解释本公开,其中:
19.图1a是示出了本实用新型示例所涉及的拾取装置的第一视角的示意图;图1b是示出了本实用新型示例所涉及的拾取装置的第二视角的示意图。
20.图2是示出了本实用新型示例所涉及的输液袋的示意图。
21.图3是示出了本实用新型示例所涉及的拾取装置的第一视角的分解图。
22.图4a是示出了本实用新型示例所涉及的第一夹持部、第二夹持部、限位部以及驱动机构的示意图;图4b是示出了本实用新型示例所涉及第二视角的拾取装置的分解图。
23.图5a是示出了本实用新型示例所涉及的拾取装置处于拾取状态的示意图;图5b是示出了本实用新型示例所涉及的拾取装置处于释放状态的示意图。
具体实施方式
24.以下,参考附图,详细地说明本公开的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。
25.需要说明的是,本公开中的术语“包括”和“具有”以及它们的任何变形,例如所包括或所具有的一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可以包括或具有没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
26.本公开的实施方式涉及一种拾取装置,适用于拾取输液袋的拾取装置。在本实施方式中,拾取装置还可以称为夹持装置、拾取机构等,通过本实施方式的拾取装置,能够便于拾取输液袋并且在拾取输液袋后便于利用注射器获取输液袋中的药液。
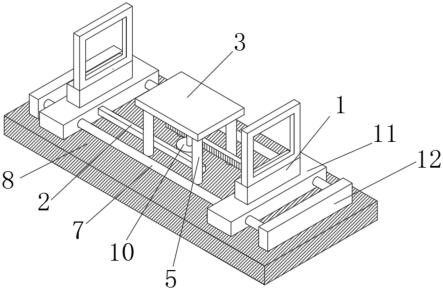
27.图1a是示出了本实用新型示例所涉及的拾取装置400的第一视角的示意图;图1b是示出了本实用新型示例所涉及的拾取装置400的第二视角的示意图。
28.在一些示例中,拾取装置400可以包括基座41、支承座42、第一夹持部43、以及第二夹持部44(参见图1a和图1b)。第一夹持部 43和第二夹持部44可以设置在支承座42上。第一夹持部43与第二夹持部44可以相配合以夹持输液袋200。支承座42可以以可旋转的方式设置在基座41上。在一些示例中,支承座42可以旋转以带动被第一夹持部43和第二夹持部44夹持的输液袋200翻转,以使输液袋200 的从图1a所示的状态翻转为出液口朝向下方的状态。在这种情况下,能够使输液袋200中的药液在重力的作用下位于输液袋200的出液口的附近,由此能够便于注射器的针头获取输液袋中的药液。
29.在一些示例中是,基座41可以为机械臂。基座41可以通过平移、旋转的方式移动以带动支承座42上的第一夹持部43和第二夹持部44 移动。由此,能够通过基座41的移动以使拾取装置400靠近或远离输液袋200。
30.在一些示例中,拾取装置400还可以包括吸盘45(参见图1a)。吸盘45可以用于吸附
输液袋200的主体。在一些示例中,吸盘45可以吸附于容纳部201(后面描述)。由此,能够通过吸盘固定输液袋,进而能够能够使输液袋200更稳定地翻转。
31.在一些示例中,拾取装置400还可以包括真空泵。真空泵可以与吸盘45连通。真空泵可以用于抽取吸盘45与容纳部201之间的空气以在吸盘45与容纳部201之间形成负压。由此,能够通过负压使吸盘 45更牢固地吸附输液袋200,从而有利于使输液袋200更加稳固地被翻转。
32.在一些示例中,拾取装置400还可以包括第二传感器。第二传感器可以用于检测被夹持于第一夹持部43与第二夹持部44之间的输液袋200的容纳部201是否被吸盘45吸附。在一些示例中,第二传感器可以设置在支承座42上。第二传感器可以朝向夹持于第一夹持部43 和第二夹持部44的输液袋200的容纳部201。在这种情况下,能够通过第二传感器检测在输液袋200被翻转时,容纳部201是否被吸盘45 吸附,从而便于及时对吸盘45无法吸附容纳部201的情况进行调整。在一些示例中,第二传感器可以是距离传感器。
33.图2是示出了本实用新型示例所涉及的输液袋200的示意图。
34.在一些示例中,输液袋200可以具有容纳部201、颈部202以及凸缘203(参见图2)。容纳部201可以具有用于容纳药液的容纳腔室。颈部202可以具有中空部。中空部可以与容纳腔室连通。由此,容纳腔室中的药液能够经由中空部转移至输液袋200的外部。在一些示例中,输液袋200的出液口可以位于颈部202的远离容纳部201的端部。
35.在一些示例中,凸缘203可以呈环状。凸缘203可以是从颈部202 的外壁向外延伸而形成的突起。
36.在一些示例中,输液袋200的袋身可以由柔性材料制成。换言之,容纳部201可以由柔性材料制成。
37.在一些示例中,输液袋可以具有多个颈部202,例如2个、3个、或4个。在图2和图3所示的实施例中,颈部202的数量为2两个,颈部202可以包括第一颈部202a和第二颈部202b。同样地,凸缘203 可以包括位于第一颈部202a上的第一凸缘203a和位于第二颈部202b 上的第二凸缘203b。在一些示例中,第一颈部202a可以用于向容纳腔室中注入用于混合的药物,第二颈部202b可以用于从容纳腔室向患者输液。
38.在一些示例中,第一夹持部43与第二夹持部44可以分别抵接于颈部202的相对两侧以对输液袋200进行拾取。
39.以下,输液袋200具有2个颈部202为例,对本实施方式示例所涉及的拾取装置400进行说明。需要说明的是,针对具有其他任意数量颈部202的输液袋200,本领域技术人员基于颈部202的数量对拾取装置400稍加改动便能够对输液袋200进行拾取。
40.图3是示出了本实用新型示例所涉及的拾取装置400的第一视角的分解图。
41.如上所述,拾取装置400可以包括基座41和可旋转地设置在基座 41上的支承座42(参见1a和图3)。在一些示例中,基座41与支承座42可以旋转连接。支承座42可以相对基座41绕旋转轴l旋转。在一些示例中旋转轴l可以水平布置。
42.在一些示例中,支承座42可以呈平板状。支承座42可以以较大的端面正交于旋转轴l的方式设置于基座41。第一夹持部43、第二夹持部44、以及吸盘45可以设置在支承座42的相对于基座41的那个端面。由此,能够对第一夹持部43、第二夹持部44、以及吸盘45在支承座42上的设置进行合理布局。
43.在一些示例中,拾取装置400可以包括多个吸盘45,例如2个、3 个、或4个。在图3所示的实施例中,吸盘45的数量为2个,吸盘45 可以包括吸盘45a和吸盘45b。吸盘45a和吸盘45b可以沿输液袋200 的长度方向布置。由此,能够使吸盘45对输液袋200的吸附更加稳固。
44.图4a是示出了本实用新型示例所涉及的第一夹持部43、第二夹持部44、限位部49以及驱动机构46的示意图;图4b是示出了本实用新型示例所涉及第二视角的拾取装置400的分解图。
45.如上所述,第一夹持部43与第二夹持部44可以配合夹持输液袋 200。在一些示例中,第一夹持部43与第二夹持部44可以配合夹持输液袋200的颈部202。
46.在一些示例中,第一夹持部43与第二夹持部44可以配合形成夹持空间a。夹持空间a可以与颈部202相匹配。换言之,夹持空间a的形状和/或尺寸可以与颈部202的形状和/或尺寸相匹配。
47.在一些示例中,第一夹持部43与第二夹持部44可以以使颈部202 与旋转轴l呈预定角度的方式夹持颈部202。在一些示例中,第一夹持部43与第二夹持部44可以以使颈部正交于旋转轴l的方式夹持颈部 202。在这种情况下,能够便于支承座42带动输液袋200旋转以使颈部202的出液口朝向下方,进而能够便于获取容纳部201中的药液。
48.如图4a和图4b所示,在一些示例中,第一夹持部43可以包括第一夹持臂431和第二夹持部432。第二夹持部44可以包括第三夹持臂443和第四夹持臂444。第一夹持臂431可以与第三夹持臂432配合夹持第一颈部202a。第二夹持臂432可以与第四夹持臂444配合夹持第二颈部202b。
49.如图4a和图4b所示,在一些示例中,第一夹持部43还可以包括第五夹持臂435和第六夹持臂436。第二夹持部44还可以包括第七夹持臂447和第八夹持臂448。第五夹持臂435可以与第七夹持臂447 配合夹持第一颈部202a。第六夹持臂436可以与第八夹持臂448配合夹持第二颈部202b。
50.在一些示例中,第一夹持臂431和第三夹持臂443夹持的位置与第五夹持臂435和第七夹持臂447夹持的位置可以分别位于第一凸缘 203a的相对两侧。在一些示例中,第二夹持臂432和第四夹持臂444 夹持的位置与第六夹持臂436和第八夹持臂448夹持的位置可以分别位于第二凸缘203b的相对两侧。由此,能够更稳定地对颈部202进行夹持。
51.在一些示例中,第一夹持部43还可以包括第一连接部437(参见图4b)。第一连接部437可以用于连接第一夹持臂431、第二夹持臂 432、第五夹持臂435、以及第六夹持臂436。在一些示例中,第一连接部437、第一夹持臂431、第二夹持臂432、第五夹持臂435、以及第六夹持臂436可以一体成型以形成第一夹持部43。
52.在一些示例中,第二夹持部44还可以包括第二连接部449(参见图4b)。第二连接部449可以用于连接第三夹持臂443、第四夹持臂 444、第七夹持臂447、以及第八夹持臂448。在一些示例中,第二连接部449、第三夹持臂443、第四夹持臂444、第七夹持臂447、以及第八夹持臂448可以一体成型以形成第二夹持部44。
53.在一些示例中,第一连接部437可以具有缺口437a。第二连接部 449可以具有缺口439a。缺口437a的位置可以与缺口439a的位置相匹配以使第一夹持部43与第二夹持部44交叉的方式组合。换言之,以图4a所示的方式组合。由此,能够通过对第一颈部202a和第二颈部 202b的夹持使拾取装置400更稳定地拾取输液袋200。
54.在一些示例中,拾取装置400还可以包括限位部49(参见图4a 和图4b)。限位部可以设置在支承座42上。在一些示例中,限位部49 可以位于第一夹持部43与第二夹持部44之间。在一些示例中,限位部49可以用于在第一夹持部43和第二夹持部44夹持颈部202时抵接于颈部202。换言之,第一夹持部43、第二夹持部44、以及限位部49 可以相配合以分别从三个方向抵接颈部202。由此,能够更稳定地夹持颈部202从而提高对输液袋200拾取的稳定性。
55.在一些示例中,限位部49可以包括第一限位部491和第二限位部 492(参见图4b)。第一限位部491可以与第一夹持臂431、第三夹持臂443、第五夹持臂435、以及第七夹持臂447配合以夹持第一颈部202a。第二限位部492可以与第二夹持臂432、第四夹持臂444、第六夹持臂 436、以及第八夹持臂448配合以夹持第二颈部202b。
56.在一些示例中,第一夹持臂431、第三夹持臂443、第五夹持臂435、以及第七夹持臂447可以具有与第一颈部202a相匹配的凹槽。第一夹持臂431和第五夹持臂435上的凹槽可以与第三夹持臂443和第七夹持臂447上的凹槽可以相对布置。在一些示例中,在第一夹持部43和第二夹持部44夹持第一颈部202a时,第一颈部202a可被置于第一夹持臂431、第三夹持臂443、第五夹持臂435、以及第七夹持臂447上的凹槽中。由此,能够使第一夹持部43和第二夹持部44更稳定地夹持第一颈部202a。
57.在一些示例中,第二夹持臂432、第四夹持臂444、第六夹持臂436、以及第八夹持臂448可以具有与第二颈部202b相匹配的凹槽。第二夹持臂432和第六夹持臂436上的凹槽可以与第四夹持臂444和第八夹持臂448上的凹槽可以相对布置。在一些示例中,在第一夹持部43和第二夹持部44夹持第二颈部202b时,第二颈部202b可被置于第二夹持臂432、第四夹持臂444、第六夹持臂436、以及第八夹持臂448上的凹槽中。由此,能够使第一夹持部43和第二夹持部44更稳定地夹持第二颈部202b。
58.在一些示例中,拾取装置400还可以包括驱动机构46(参见图4a)。驱动机构46可以用于驱使第一夹持部43与第二夹持部44相对移动以使第一夹持部43与第二夹持部44夹持或释放颈部202。
59.在一些示例中,驱动机构46可以包括滑座461、第一滑块462、以及第二滑块463。第一滑块462和第二滑块463可以与滑座461榫槽连接。由此,第一滑块462和第二滑块463可以沿预定方向在滑座461 上移动。
60.在一些示例中,第一滑块462可以与第一夹持部43联动。第二滑块463可以与第二夹持部44联动。在一些示例中,第一滑块462可以与第二滑块463相互靠近以使第一夹持部43和第二夹持部44相互靠近以夹持颈部202。在一些示例中,第一滑块462可以与第二滑块463 相互远离以使第一夹持部43和第二夹持部44相互远离以释放颈部202。
61.在一些示例中,第一滑块462可以与第二滑块463联动。在这种情况下,能够通过仅控制第一滑块462即可使第一滑块462与第二滑块463相互靠近或相互远离,从而简化对第一夹持部43和第二夹持部 44夹持颈部202的控制。
62.图5a是示出了本实用新型示例所涉及的拾取装置400处于拾取状态的示意图;图5b是示出了本实用新型示例所涉及的拾取装置400处于释放状态的示意图。
63.在一些示例中,拾取装置400还可以包括位置检测机构47(参见图5)。位置检测机构47可以用于检测第一夹持部43和第二夹持部44 能否相互靠近至夹持颈部202的位置。
64.位置检测机构47包括检测构件471和第一传感器472(参见图5a 和图5b)。检测构件471可以与第一夹持部43联动。在一些示例中,检测构件471也可以与第一滑块462联动。第一夹持部43可以具有预设位置。在一些示例,当第一夹持部43处于预设位置时,第一夹持部 43和第二夹持部44可以夹持颈部202。在一些示例中,检测构件471 可以具有预设检测区域。预设检测区域可以因检测构件471与第一夹持部43的联动而在第一夹持部43移动时移动。在一些示例中,第一传感器472可以对准预设检测区域的移动路径。在一些示例中,检测构件471的预设检测区域可以与第一夹持部43的预设位置相对应。在这种情况下,当第一传感器472检测到检测构件471的预设检测区域时,则能够说明第一夹持部43能够到达预设位置而与第二夹持部44 配合夹持颈部202,从而能够及时对第一夹持部43无法达到预设位置夹持颈部202的情况进行调整。
65.在一些示例中,检测构件471可以呈薄片状。检测构件471可以具有第一通孔471a、第二通孔471b和检测部471c(参见图5a和图5b)。第一通孔471a与第二通孔471b之间共同的侧壁可以为检测部471c。在一些示例中,第一通孔471a、第二通孔471b、以及检测部471c配合组成预设检测区域。在一些示例中,第一传感器472可以用于检测第一通孔471a、第二通孔471b、以及检测部471c。如图5a所示,在一些示例中,当第二通孔471b位于第一传感器472的正下方时,第一传感器472检测到第二通孔471b,则说明此时第一夹持部43与第二夹持部44处于无法夹持颈部202的位置。如图5b所示,在一些示例中,当检测部471c位于第二传感器472的正下方时,第一传感器472检测到检测部471c,则说明此时第一夹持部43与第二夹持部44处于可以夹持颈部202的预设位置。
66.在一些示例中,第一传感器472可以是距离传感器。
67.虽然以上结合附图和示例对本公开进行了具体说明,但是可以理解,上述说明不以任何形式限制本公开。本领域技术人员在不偏离本公开的实质精神和范围的情况下可以根据需要对本公开进行变形和变化,这些变形和变化均落入本公开的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。