1.本发明涉及一种大气风场影响下的激光雷达飞机尾涡环量校正方法,属于航空安全气象保障领域。
背景技术:
2.飞机尾涡是呈喇叭状且旋转方向相反的一对涡旋,是一种由飞机翼尖产生的不稳定高速气流,其强度与飞机的重量、翼展和飞行速度有关。飞机尾涡对航空安全及运输效率的影响主要表现在:第一,就飞机自身而言,尾涡会影响飞机周围的流场,改变机翼和尾翼附近气流的方向和速度,从而影响飞机的升力、阻力和稳定性;第二,就紧随其后的飞机而言,当后机进入前机尾涡区时,会出现飞机异常颠簸、下沉甚至翻转等现象,特别是在飞机起飞和着陆阶段,处置不当会发生灾难性事故;第三,对窄间距跑道的机场来说,侧风情况下,飞机尾涡还会对相邻跑道的飞机起降产生不利影响;第四,就枢纽机场的运行效率而言,为避免尾涡对后机产生安全威胁,国际民航组织提出了最小安全间隔,该间隔基于保守安全策略制定的,限制了枢纽机场的吞吐量。
3.相干测风激光雷达可以对飞机尾涡进行有效地识别与探测,并实现涡核位置、尾涡环量、尾涡运动轨迹等特征参数的反演与分析。其中,尾涡环量表征了尾涡的强度,是衡量尾涡是否存在危害的重要参数。尾涡环量的精确反演对准确评估尾涡危险程度、建立安全可靠的动态安全间隔系统至关重要。然而,在测风激光雷达观测尾涡过程中,由于激光束与尾涡之间存在相对运动(即激光雷达光束在上下移动扫描过程中,尾涡不是静止的,会存在下落运动或者受到近地面效应影响而反弹作上升运动),往往会造成尾涡环量的高估或者低估,从而产生较大的环量反演误差。
4.目前尾涡环量校正方法存在两大局限性:1. 只考虑了尾涡沿垂直激光雷达光束方向的运动,是一种理想的运动状态,没有评估大气风场下的真实尾涡运动轨迹引入的环量反演误差;2. 受到大气风场的影响,在有些情况下,尽管激光束与尾涡之间存在相对运动,但并不存在高估或者低估,如果依然对该情况下的环量进行校正,则会引入新的反演误差。
技术实现要素:
5.本发明的目的是提供一种大气风场影响下的激光雷达飞机尾涡环量校正方法,提高尾涡环量反演精度,以弥补现有方法存在的上述不足。
6.为了达到上述目的,本发明采用的技术方案是:大气风场影响下的激光雷达飞机尾涡环量校正方法,其特征是包括以下步骤:1)测风激光雷达执行rhi模式,将激光雷达方位角设置为垂直跑道方向,对飞机后方的空间进行扫描,获得尾涡扫描片段。
7.2)同一个尾涡扫描片段中,将初始时刻t0和当前观测时刻t1对应的尾涡涡核位置坐标分别记为c
0 (x0,y0)和c
1 (x1,y1),分别以c0和c1为圆心,做与t1时刻的激光束所在直线
相切的圆,分别记为圆c0和圆c1,切点分别记为t0和t1;做与t1时刻的激光束所在直线平行且穿过c0点的辅助线l;则l与c1t1所在直线相垂直,记垂足为a1,则c0c1a1构成直角三角形。
8.3)根据几何关系,求解直角三角形c0c1a1中的几何参量,计算t0至t1时段两个涡核连线c0c1与水平线之间的夹角:;设θ1为t1时刻激光束的俯仰角,则尾涡半径校正值为:δr=|c1t1‑ꢀ
c0t0|=a1c1=c0c1•
sin(θ1 α)。
9.4)选择相邻两个rhi尾涡扫描片段,分别提取扫描片段1和扫描片段2中的尾涡涡核(左涡核或右涡核)的位置c
rhi_1
(x1, y1)和c
rhi_2
(x2, y2),根据c
rhi_1
和c
rhi_2
的变化,判断尾涡运动轨迹。
10.所述步骤4)中,令涡核在水平方向的变化量为δx=x
2-x1,在竖直方向的变化量为δy=y
2-y1,若δx》0,则表明尾涡向远离激光雷达的方向运动;反之,则表明尾涡向靠近激光雷达的方向运动;若δy》0,则表明尾涡由于受到近地面效应影响出现反弹现象,作上升运动;反之,则表明尾涡作下降运动。
11.5)根据俯仰角的变化值确定激光雷达光束扫描方向。
12.所述步骤5)中,令俯仰角的变化值δθ=θ
1-θ0,其中θ0为t0时刻激光束与水平线的夹角,θ1为t1时刻激光束与水平线的夹角;若δθ》0,则表明激光雷达光束向上扫描;反之,则表明激光雷达光束向下扫描。
13.6)根据上述步骤4)、5)得到的大气风场影响下的尾涡运动轨迹和激光雷达俯仰角的变化,判断尾涡与激光雷达光束的相对运动方向,据此得到各种不同的尾涡环量估计情,包括环量高估、低估或无估计误差情况,进一步利用三角函数获得各种情况下的尾涡半径校正公式;利用获得的所有情形下的尾涡半径校正公式,得到真实半径r1=r0 δr;其中r0为校正前的尾涡测量半径,从激光雷达测量数据获得,δr为校正值,r1为校正后的尾涡真实半径。
14.7)利用通过半径校正公式得到的真实尾涡半径r1,最终得到校正后的真实尾涡环量为g1=2πr
1vwv_t1
,其中v
wv_t1
代表t1时刻激光雷达观测到的尾涡切向速度,即激光雷达输出的径向风速值。
15.所述步骤1)中,每个rhi尾涡片段扫描持续时间不大于20s。
16.所述步骤5)中,各种不同的尾涡环量估计情形分为四大类:1)激光光束向上扫描,尾涡下降:当尾涡远离激光雷达运动到不同位置时,环量估计会出现1种情形:低估;当尾涡靠近激光雷达运动到不同位置时,会出现圆c0与圆c1位于激光束同侧和两侧的情况,环量估计会出现6种情形:同侧时高估、低估和无估计误差3种情形,以及两侧时高估、低估和无估计误差3种情形;2)激光光束向下扫描,尾涡下降:当尾涡远离激光雷达运动到不同位置时,会出现圆c0与圆c1位于激光束同侧和两
侧的情况,环量估计会出现4种情形:同侧时高估1种情形,以及两侧时高估、低估和无估计误差3种情形;当尾涡靠近激光雷达运动到不同位置时,会出现圆c0与圆c1位于激光束同侧和两侧的情况,环量估计会出现6种情形:同侧时高估、低估和无估计误差3种情形,以及两侧时高估、低估和无估计误差3种情形;3)激光光束向下扫描,尾涡上升:当尾涡远离激光雷达运动到不同位置时,会出现圆c0与圆c1位于激光束同侧和两侧的情况,环量估计会出现6种情形:同侧时高估、低估和无估计误差3种情形,以及两侧时高估、低估和无估计误差3种情形;当尾涡靠近激光雷达运动到不同位置时,会出现圆c0与圆c1位于激光束同侧的情况,环量估计会出现1种情形:低估;4)激光光束向上扫描,尾涡上升:当尾涡远离激光雷达运动到不同位置时,会出现圆c0与圆c1位于激光束同侧和两侧的情况,环量估计会出现6种情形:同侧时高估、低估和无估计误差3种情形,以及两侧时高估、低估和无估计误差3种情形;当尾涡靠近激光雷达运动到不同位置时,会出现圆c0与圆c1位于激光束同侧和两侧的情况,环量估计会出现4种情形:同侧时高估1种情形,以及两侧时高估、低估和无估计误差3种情形。
17.本发明与现有方法相比,主要优点在于:1. 本文采用几何方法对大气风场影响下的激光雷达飞机尾涡环量进行校正,该方法考虑了大气风场影响下的尾涡水平运动对环量反演的影响。与传统校正方法中只考虑了环量高估和低估两种情形不同,本方法综合评估了34种情形下的尾涡环量反演误差,并对无环量估计误差的情形进行了分析,以获得更加精确的环量值,为准确评估尾涡危险程度提供科学的数据支撑。
18.2. 本方法对飞机尾涡环量计算方法进行了优化,原理简单,不需要对激光雷达系统进行硬件上的改动,易于实现。
附图说明
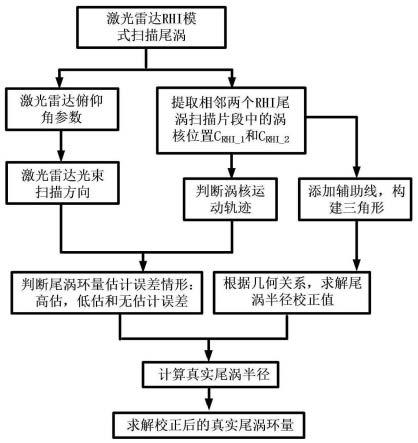
19.图1大气风场影响下的激光雷达飞机尾涡环量校正方法流程图。
20.图2尾涡横向运动引起的尾涡半径测量误差分析图,该图所属情形为:激光雷达向上扫描,尾涡下降且远离激光雷达运动,位于t1时刻激光光束同侧,环量低估;其中,c0表示t0时刻尾涡位置;c1表示情形1中t1时刻尾涡位置。
21.图3尾涡半径校正几何关系图,其中,c0表示t0时刻尾涡位置;c1表示情形1中t1时刻尾涡位置。
22.图4尾涡演化到不同位置时环量低估、无估计误差和高估示意图,其中,c0表示t0时刻尾涡位置;c1表示情形1中t1时刻尾涡位置;c2表示情形2中t1时刻尾涡位置;c3表示情形3中t1时刻尾涡位置;情形1代表低估、情形2代表无误差估计、情形3代表高估。
具体实施方式
23.参见图1,在本发明实施例中,大气风场影响下的激光雷达飞机尾涡环量校正方法包括:
1)测风激光雷达执行rhi模式,将激光雷达方位角设置为垂直跑道方向,对飞机后方的空间进行扫描,获得尾涡扫描片段。
24.2)添加辅助线l,在同一个rhi尾涡扫描片段中的t0和t1时段内的两个涡核与辅助线之间构建三角形。
25.参见图2,同一个rhi尾涡扫描片段中, t0和t1时刻对应的尾涡涡核分别为c
0 (x0,y0)和c
1 (x1,y1),构建辅助线l使其与t1时刻的激光光束所在直线平行,并使其过c0点。因辅助线l与圆c1的切线平行,所以辅助线l与半径c1t1(或c1t1的延长线)垂直,垂足为a1点,构建三角形c0c1a1。
26.3)根据几何关系,求解尾涡半径校正值。
27.参见图2和图3中的几何关系,求解三角形c0c1a1中的几何参量,计算t0至t1时段两个涡核连线c0c1与水平线之间的夹角:。
28.设θ1为t1时刻激光光束(或辅助线l)的俯仰角,则尾涡半径校正值为δr=|c1t1‑ꢀ
c0t0|=a1c1=c0c1•
sin(θ1 α)。
29.该情形下,激光雷达向上扫描,尾涡下降且远离激光雷达运动,位于t1时刻激光光束同侧,环量低估,参见图4中的情形1,因而尾涡半径校正值公式为:,其中v
scan
代表激光束扫描速度矢量,其值大于0表示激光束向上扫描。
30.4)提取相邻两个rhi扫描片段中的涡核位置c
rhi_1
(x1, y1)和c
rhi_2
(x2, y2)。根据c
rhi_1
和c
rhi_2
的变化,确定大气风场影响下的涡核运动轨迹:具体地,根据涡核位置坐标c
rhi_1
(x1, y1)和c
rhi_2
(x2, y2),令涡核在水平方向的运动为δx=x
2-x1,在竖直方向的变化量为δy=y
2-y1。
31.若δx》0,则表明尾涡向远离激光雷达的方向运动;反之,则表明尾涡向靠近激光雷达的方向运动。
32.若δy》0,则表明尾涡由于受到近地面效应影响出现反弹现象,作上升运动;反之,则表明尾涡作下降运动。
33.由于每个rhi尾涡片段扫描周期比较短,这里将尾涡的运动简化为单一方向运动,而非往复的复杂运动。即在相邻两个rhi尾涡片段中,在不大于20s的时间内,尾涡在水平方向要么只作远离运动,要么只作靠近运动,或者没有发生水平运动。竖直方向运动同上,在此不再进行赘述。
34.5)根据俯仰角的变化值确定激光雷达光束扫描方向:令俯仰角的变化值δθ=θ
1-θ0,其中θ0为t0时刻激光束与水平线的夹角,θ1为t1时刻激光束与水平线的夹角;若δθ》0,则表明激光雷达光束向上扫描;反之,则表明激光雷达光束向下扫描。
35.6)综合判断尾涡环量估计误差,计算真实尾涡半径:综合考虑大气风场影响下的尾涡的运动轨迹和激光雷达俯仰角的变化,判断尾涡与激光雷达光束的相对运动方向和环量高估、低估或无估计误差情况,以图4为例,可以获
得34种情况下的尾涡半径校正公式如下。
[0036]036]
ꢀ
利用上述公式,得到最终真实半径r1=r0 δr。
[0037]
7)求解校正后的真实尾涡环量根据半径校正公式,最终得到校正后的真实尾涡环量为g1=2πr
1vwv_t1
,其中v
wv_t1
代表t1时刻尾涡的切向速度。
[0038]
进一步地,综合上述情形,归纳后的尾涡半径校正公式如下:
其中,sgn代表符号函数,r0代表校正前的尾涡半径,即从原始观测数据计算所得的半径,k代表正负号因子,当k》0时,δr的求解需采用第一个公式,当k《0时,δr的求解需采用第二个公式;v代表激光束扫描速度矢量,其值大于0表示激光束向上扫描;反之,其值小于0表示激光束向下扫描。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。