1.本实用新型涉及开方机技术领域,特别是一种开方机上下料台。
背景技术:
2.现有的开方机,在通过人工操作吊机或者航吊设备,将未开方的硅棒放入到开方机上料台,然后又通过吊机和航吊等设备,将开方后的硅块,取出放到托盘存储。这样操作花费的时间较长,需要的人力较多。
技术实现要素:
3.本实用新型的目的是提供一种开方机上下料台,以解决现有技术中的技术问题,它能够实现开方机的自动化上下料。
4.本实用新型提供了一种开方机上下料台,包括:
5.基座,基座上形成有第一位置以及第二位置;
6.夹持座,可移动的设于基座上,夹持座用于夹持或释放硅棒;
7.第一驱动件,用于驱动夹持座沿第一方向往复移动,使得夹持座位于第一位置或第二位置;
8.第二驱动件,用于驱动硅棒从上料位置移动到位于第一位置处的基座上;
9.第三驱动件,用于驱动硅棒从位于第二位置处的基座上移动到下料位置。
10.如上所述的一种开方机上下料台,其中,可选的是,基座包括基板,基板上开设有若干沿着第一方向延伸的直槽,若干夹持座与若干直槽一一对应,夹持座的第一端与第一驱动件连接,夹持座的第二端延伸出直槽。
11.如上所述的一种开方机上下料台,其中,可选的是,基板的第一位置和第二位置上均设有若干第一引导件,第一引导件设于相邻的两个直槽之间,第一引导件包括第一引导块以及设于第一引导块相对两侧的若干滚轮。
12.如上所述的一种开方机上下料台,其中,可选的是,夹持座包括底板、夹爪以及第一驱动气缸,夹爪设于底板上,底板延伸进直槽内并与第一驱动件连接,第一驱动气缸设于基板上,以驱动夹爪夹持或释放硅棒。
13.如上所述的一种开方机上下料台,其中,可选的是,第一驱动件包括第一驱动电机、第一驱动丝杆、第一丝杆螺母以及第一承载板,第一驱动电机的输出端与第一驱动丝杆连接,第一丝杆螺母螺纹连接于第一驱动丝杆上,第一承载板的底端与第一丝杆螺母连接,第一承载板的顶端与底板连接。
14.如上所述的一种开方机上下料台,其中,可选的是,还设有第四驱动件,第四驱动件用于驱动夹持座沿重力方向升降。
15.如上所述的一种开方机上下料台,其中,可选的是,还设有装料件,装料件设于上料位置和下料位置处,装料件包括支架以及设于支架上的若干装料框,装料框用于收容硅棒,若干装料框可沿既定轨迹运动。
16.如上所述的一种开方机上下料台,其中,可选的是,第二驱动件包括第一底座以及固定于第一底座上的第二驱动气缸,第一底座位于支架的背离基座的一侧,第二驱动气缸用于将装料框内的硅棒推送至基座上的第一位置处的第一引导件上。
17.如上所述的一种开方机上下料台,其中,可选的是,第三驱动件包括第三驱动气缸,第三驱动气缸用于将硅棒从位于第二位置处的夹持座上推送到装料框内。
18.如上所述的一种开方机上下料台,其中,可选的是,基座于靠近支架的一侧设有第二引导件,第二引导件包括皮带、主动轮、从动轮以及第四驱动电机,皮带套接于主动轮以及从动轮上,第四驱动电机的输出端与主动轮连接,以带动皮带转动。
19.与现有技术相比,本实用新型通过设置多个驱动件,第二驱动件驱动硅棒从上料位置移送到第一位置的基座,开方作业后,夹持座在第一位置处对硅棒进行夹持,第一驱动件驱动夹持座连通硅棒到达第二位置,夹持座释放硅棒,第三驱动件再驱动硅棒从基座上移送到下料位置,从而实现了硅棒的自动上下料,方便快捷,省时省力。
附图说明
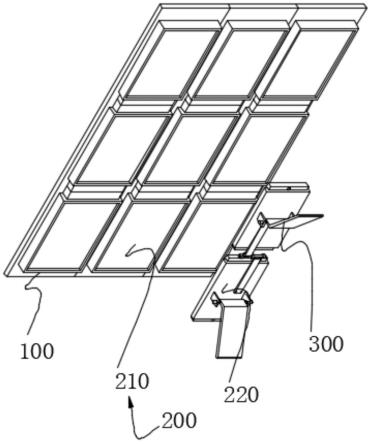
20.图1是本技术所提供实施例的整体结构的轴测图;
21.图2是本技术所提供实施例的整体结构的俯视图;
22.图3是本技术所提供实施例的整体结构的仰视图;
23.图4是本技术所提供实施例的整体结构的侧视图;
24.图5是本技术所提供实施例的整体结构的局部放大示意图。
25.附图标记说明:
26.10-基座,11-基板,12-直槽,13-立板;
27.20-夹持座,21-底板,22-夹爪,221-固定爪部,222-移动爪部,23-第一驱动气缸;
28.30-第一驱动件,31-第一驱动电机,32-第一驱动丝杆,33-第一承载板;
29.40-装料件,41-支架,42-装料框,43-第三驱动电机;
30.50-第二驱动件,51-第一底座,52-第二驱动气缸;
31.60-第三驱动件,61-第三驱动气缸;
32.70-第四驱动件,71-第二驱动电机,72-转轴,73-第二驱动丝杆,74-第二承载板;
33.80-第一引导件,81-第一引导块,82-滚轮;
34.90-第二引导件,91-皮带,92-主动轮,93-从动轮,94-第四驱动电机;
35.l1-第一方向;
36.l2-第二方向。
具体实施方式
37.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能解释为对本实用新型的限制。
38.在光伏组件制作的初期,将生长出来的硅棒切割为较小的硅块,需要经过开方工序,在将硅棒送至开方机进行开方,以及将开方后的硅块下料时候,通常是通过吊机和航吊
等设备进行上料以及下料操作,这样操作花费的时间较长,需要的人力较多,且具有安全隐患。
39.为解决上述技术问题,参照图1至图5所示,本技术提供了一种开方机上下料台,包括:
40.基座10,基座10作为开方工序中,进行开方操作时候的承托设备,用于承托待开方的硅棒以及开方以后的硅块,基座10上形成有第一位置以及第二位置。
41.夹持座20,可移动的设于基座10上,夹持座20用于夹持或释放硅棒,硅棒从上料位置处移送到基座10的第一位置,夹持座20夹持硅棒,开方后,夹持座20连同硅棒一起移动到第二位置时,将硅棒放置在第二位置。
42.第一驱动件30,用于驱动夹持座20沿第一方向l1往复移动,使得夹持座20位于第一位置或第二位置,夹持座20在第一位置时,硅棒从上料位置移送到第一位置,夹持座20进行夹持固定,第一驱动件30将夹持座20移送到第二位置,夹持座20将硅棒释放,第一驱动件30再将夹持座20回到第一位置,进行循环。
43.第二驱动件50,用于驱动硅棒从上料位置移动到位于第一位置处的基座10上,在一种可行的实施方式中,第二驱动件50驱动硅棒沿轴线方向移动,从而避免了吊机和航吊等设备对硅棒进行吊装作业,费时费力,且具有安全隐患。
44.第三驱动件60,用于驱动硅棒从位于第二位置处的基座10上移动到下料位置,此时硅棒已经被开方为硅块形态,在一种可行的实施方式中,第三驱动件60驱动开方后的硅棒沿轴线方向移动,从而避免了吊机和航吊等设备对硅块进行吊装作业,费时费力,且具有安全隐患。
45.上述实施例通过设置多个驱动件,第二驱动件50驱动硅棒从上料位置移送到第一位置的基座10,开方作业后,夹持座20在第一位置处对硅棒进行夹持,第一驱动件30驱动夹持座20连通硅棒到达第二位置,夹持座20释放硅棒,第三驱动件60再驱动硅棒从基座10上移送到下料位置,从而实现了硅棒的自动上下料,方便快捷,省时省力。
46.本技术的实施例中,参照图1及图2所示,基座10包括基板11以及立板13,立板13沿重力方向垂直延伸,并与基板11连接,起到支撑定位作用,基板11沿水平方向延伸,基板11上开设有若干沿着第一方向l1延伸的直槽12,若干直槽12之间相互平行,且沿第二方向l2间隔设置,第二方向l2为硅棒的延伸方向,第一方向l1与第二方向l2所形成的平面沿水平方向延伸,直槽12贯穿基板11,若干夹持座20与若干直槽12一一对应,夹持座20的第一端与第一驱动件30连接,第一驱动件30驱动夹持座20沿直槽12的延伸方向移动,在第一位置和第二位置之间进行切换,夹持座20的第二端延伸出直槽12,以用于夹持或释放位于基板11上方的硅棒。
47.通过设置多个夹持座20,以适应多种长度的硅棒,从而适用性更广,也更利于车间的生产,无需为多种长度的硅棒再去设置多种上下料台,在一种可行的实施方式中,夹持座20内部设有感应器,以检测是否存在硅棒,如果硅棒较短,只占用了部分的夹持座20,未被占用的夹持座20内的感应器检测到不存在硅棒时,不进行夹持作业。
48.本技术所提供的实施例中,参照图1、图2以及图5所示,基板11上设有若干第一引导件80,若干第一引导件80沿着第二方向l2间隔分布,第一引导件80设于相邻的两个直槽12之间,第一引导件80包括第一引导块81以及设于第一引导块81相对两侧的若干滚轮82,
在第一位置和第二位置处,均设有第一引导件80。
49.当硅棒自上料位置被第二驱动件50推送至夹持座20时候,第一引导件80可以起到支撑引导作用,位于硅棒底部相对两侧的滚轮82的表面与硅棒表面接触,减少硅棒在移送过程中的摩擦力,引导硅棒只能沿其轴线方向移动,避免硅棒在移送过程中,发生歪斜,影响后续的夹持作业。
50.当硅棒连通夹持座20一起移动到第二位置时,夹持座20释放硅棒,硅棒放置在位于第二位置处的第一引导件80上,第一引导件80引导硅棒只能沿其轴线方向移动,第三驱动件60将硅棒移送到下料位置。
51.本技术所提供的实施例中,参照图5所示,夹持座20包括底板21、夹爪22以及第一驱动气缸23,夹爪22设于底板21上,底板21延伸进直槽12内并与第一驱动件30连接,底板21的内径间隙配合于直槽12内,从而可以沿直槽12的延伸方向移动或者沿重力方向移动,底板21的底端与第一驱动件30的工作端连接,夹爪22自直槽12延伸出以夹持固定硅棒,夹爪22包括固定爪部221以及移动爪部222,移动爪部222可靠近或远离固定爪部221,第一驱动气缸23设于基板11上,以驱动夹爪22夹持或释放硅棒,第一驱动气缸23的活塞杆末端与移动爪部222连接,以驱动移动爪部222靠近或远离固定爪部221,在初始状态,移动爪部222距离固定爪部221较远,当第二驱动件50将硅棒推送至基座10上的第一位置时候,第一驱动气缸23工作,驱动移动爪部222逐步靠近固定爪部221,直至移动爪部222与固定爪部221共同将硅棒夹持固定,第一驱动件30驱动夹持座20由第一位置移动到第二位置,第一驱动气缸23工作,驱动移动爪部222远离固定爪部221,将硅棒释放,第三驱动件60再驱动硅棒从基座10上移送到下料位置,从而实现了硅棒的自动上下料。
52.本技术所提供的实施例中,参照图3所示,第一驱动件30包括第一驱动电机31、第一驱动丝杆32、第一丝杆螺母以及第一承载板33,第一驱动电机31的输出端与第一驱动丝杆32连接,第一驱动丝杆32的延伸方向与第一方向l1相平行,第一丝杆螺母螺纹连接于第一驱动丝杆32上,第一承载板33的底端与第一丝杆螺母连接,第一承载板33的顶端与底板21连接,第一驱动电机31工作,带动第一驱动丝杆32转动,继而带动第一承载板33沿第一方向l1的移动,实现夹持座20从第一位置转移至第二位置,在将硅棒释放到第二位置后,第一驱动电机31再工作,带动第一驱动丝杆32反向转动,夹持座20从第二位置回至第一位置。
53.本技术所提供的实施例中,参照图4所示,还设有第四驱动件70,还设有第四驱动件70,第四驱动件70用于驱动夹持座20沿重力方向升降,在一种可行的实施方式中,第四驱动件70包括第二驱动电机71,第二驱动电机71的输出端通过锥形齿轮副连接有转轴72,转轴72沿水平方向延伸,转轴72的另一端通过锥形齿轮副连接有第二驱动丝杆73,第二驱动丝杆73沿重力方向延伸,第二驱动丝杆73上螺纹连接有第二丝杆螺母,第二丝杆螺母上固定有第二承载板74,第一驱动件30设于第二承载板74上。第二驱动电机71工作,依次带动转轴72以及第二驱动丝杆73的转动,从而实现第二承载板74的升降,由于第一驱动件30设置第二承载板74上,夹持座20设于第一驱动件30的第一承载板33上,第二承载板74升降的同时也实现了夹持座20的同步升降。
54.在初始状态时,夹持座20位于直槽12的下方,且处于第一位置,当第二驱动件50将硅棒送至第一位置上时,第二驱动电机71工作,驱动第二承载板74上升,夹持座20延伸出直槽12表面,此时硅棒处于固定爪部221以及活动爪部之间,第一驱动气缸23工作,驱动活动
爪部靠近固定爪部221,直至将硅棒夹持,然后第一驱动电机31工作,驱动第一承载板33移动,将夹持座20连同硅棒一起转移到第二位置后,第一驱动气缸23工作,让活动爪部远离固定爪部221,将硅棒放置在位于第二位置处的第一引导件80上,此时第二驱动电机71工作,驱动第二承载板74下降,夹持座20降到直槽12下方,第一驱动电机31工作,驱动第一承载板33移动,将夹持座20从第二位置回位到第一位置。
55.本技术所提供的实施例中,参照图1至图4所示,还设有装料件40,装料件40设于上料位置和下料位置处,装料件40包括支架41以及设于支架41上的若干装料框42,装料框42用于收容硅棒,若干装料框42可沿既定轨迹运动。
56.在上料位置处,硅棒是以水平姿态放置在装料框42内的,当一装料框42移动到预设位置时,此装料框42内的硅棒的轴线方向正好与第一位置处的第一引导件80相对应,第二驱动件50工作将此硅棒沿轴线方向推送,直至此硅棒被送出装料框42,到达第一位置处的第一引导件80上。
57.在下料位置处,硅棒是以水平姿态放置在第二位置处的第一引导件80上的,下料位置处的装料件40上的一个装料框42正好与第二位置处的第一引导件80相对应,当开方完成以后,第三驱动件60工作,将此硅棒沿轴线方向推送,直至此硅棒被送至装料框42内。
58.在一种可行的实施方式中,装料件40内设有第三驱动电机43以及链条,链条可转动的支撑于支架41上,若干装料框42相间隔的连接于链条上,第三驱动电机43用于驱动链条转动,以使得若干装料框42以既定轨迹移动,在一种可行的实施方式中,链条形成腰形结构,腰形结构的长轴方向沿着重力方向延伸,从而节约了占地面积。
59.本技术所提供的实施例中,第二驱动件50包括第一底座51以及固定于第一底座51上的第二驱动气缸52,第一底座51位于支架41的背离基座10的一侧,第二驱动气缸52用于将装料框42内的硅棒推送至基座10上的第一位置处的第一引导件80上,第二驱动气缸52的活塞杆沿水平方向延伸,并与第一位置处的第一引导件80对齐,硅棒以水平姿态放置在装料框42内,当硅棒沿着预设轨迹移动到与第一位置处的第一引导件80对齐时,第二驱动气缸52工作,将硅棒推送至第一位置处的第一引导件80上,完成上料作业。
60.本技术所提供的实施例中,参照图1至图4所示,第三驱动件60包括第三驱动气缸61,第三驱动气缸61用于将硅棒从位于第二位置处的夹持座20上推送到装料框42内,第三驱动气缸61设于基座10上,第三驱动气缸61的活塞杆沿水平方向延伸,并与第二位置处的第一引导件80对齐,硅棒以水平姿态放置在第一引导件80上,第三驱动气缸61工作,将硅棒推送至下料位置处的装料框42上,完成下料作业。
61.进一步地,为辅助引导硅棒的移动,参照图1至图3所示,基座10于靠近支架41的一侧设有第二引导件90,第二引导件90包括皮带91、主动轮92、从动轮93以及第四驱动电机94,皮带91套接于主动轮92以及从动轮93上,第四驱动电机94的输出端与主动轮92连接,以带动皮带91转动,在上料位置处的第二引导件90,将上料位置推送过来的硅棒引导至第一位置处的第一引导件80上,在下料位置处的第二引导件90,将从第二位置处的第一引导件80上推送而来的硅棒引导至装料框42内。
62.以上依据图式所示的实施例详细说明了本实用新型的构造、特征及作用效果,以上仅为本实用新型的较佳实施例,但本实用新型不以图面所示限定实施范围,凡是依照本实用新型的构想所作的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所
涵盖的精神时,均应在本实用新型的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。