1.本发明涉及玻璃温室玻璃清洗技术领域,尤其涉及一种连栋玻璃温室顶部玻璃清洗系统及清洗方法。
背景技术:
2.玻璃温室的建设规模和应用领域在逐步扩大,使用中,顶面玻璃外侧容易累积灰尘,使玻璃的透光率降低,影响了玻璃温室内光照强度。为了保持良好的光照效果,需要及时对玻璃连栋温室顶面玻璃进行清洗。目前国内外玻璃连动温室顶部外侧玻璃清洗机型要求作业条件为无外遮阳网,避免遮阳网支撑立柱阻挡清洗作业,而外遮阳是玻璃温室保证夏季正常生产的不可或缺的重要组成部分,而遮阳网支撑立柱阻挡清洗机行进路线造成其无法行走的问题亟待解决。
技术实现要素:
3.针对上述技术问题,本发明实施例提供了一种连栋玻璃温室顶部玻璃清洗系统及清洗方法,以解决连栋玻璃温室顶部玻璃的清洗问题。
4.本发明实施例的第一方面提供一种连栋玻璃温室顶部玻璃清洗系统,包括:
5.清洗装置、升降台装置和行走装置;
6.所述行走装置用于所述升降台装置的移动行走;
7.所述升降台装置用于放置所述清洗装置,并且所述清洗装置跟随所述升降台装置的移动行走而进行移动行走;
8.所述清洗装置可以从所述升降台装置离开移动到洗玻璃温室顶部,所述清洗装置用于清洗玻璃温室顶部玻璃,并且所述清洗装置可以移动的进行清洗玻璃温室顶部玻璃。
9.可选地,
10.所述清洗装置包括行走机构、清洗刷组件和变位机构;
11.所述行走机构用于所述清洗装置在温室顶部的行走移动;
12.所述清洗刷组件用于温室顶部玻璃的清洗;
13.所述变位机构用于改变所述行走机构的位置以规避所述行走机构在行走过程中遇到的障碍物。
14.可选地,
15.所述行走机构包括前驱动轮ⅰ、前驱动轮ⅱ、前从动轮ⅰ、前从动轮ⅱ、后驱动轮ⅰ、后驱动轮ⅱ、后从动轮ⅰ和后从动轮ⅱ;
16.所述前驱动轮ⅰ通过前驱动电机ⅰ进行驱动,所述前驱动轮ⅱ通过前驱动电机ⅱ进行驱动,所述后驱动轮ⅰ通过后驱动电机ⅰ进行驱动,所述后驱动轮ⅱ通过后驱动电机ⅱ进行驱动;
17.所述前驱动电机ⅰ通过链条和链轮驱动所述前驱动轮ⅰ;
18.所述前驱动电机ⅱ通过链条和链轮驱动所述前驱动轮ⅱ;
19.所述后驱动电机ⅰ通过链条和链轮驱动所述后驱动轮ⅰ;
20.所述后驱动电机ⅱ通过链条和链轮驱动所述后驱动轮ⅱ。
21.可选地,
22.所述变位机构包括前压杆组件、中压杆组件、后压杆组件以及控制所述前压杆组件、中压杆组件和后压杆组件上升或下降的控制结构件;
23.所述前压杆组件和所述后压杆组件的结构相同,所述前压杆组件包括前连接杆ⅰ、前连接杆ⅱ、前连接光杆、两个前连接轴承和两个前方形滑块,所述后压杆组件包括后连接杆ⅰ、后连接杆ⅱ、后连接光杆、两个后连接轴承和两个后方形滑块;
24.所述中压杆组件包括中连接杆ⅰ、中连接杆ⅱ、中连接光杆、两个中连接轴承和两个中方形滑块;
25.所述控制结构件包括方形管和驱动杆,所述方形管的管身依次设置前滑槽、中滑槽和后滑槽,所述前滑槽、中滑槽和后滑槽均穿透所述方形管的管身,所述前连接光杆穿过所述前滑槽,所述中连接光杆穿过所述中滑槽,所述后连接光杆穿过所述后滑槽;
26.所述驱动杆固定连接到所述方形管的上部,所述驱动杆通过变位驱动电机驱动进行前后移动;
27.所述前连接杆ⅰ、前连接杆ⅱ、后连接杆ⅰ和后连接杆ⅱ前端均活动连接驱动轮连接架,所述驱动轮连接架呈平行四边形框架,并且驱动轮连接架的平行四边形框架的每条边框在外力作用下均可以自由的活动从而改变平行四边形框架所在平行四边形的内角;
28.所述中连接杆ⅰ和中连接杆ⅱ前端均活动连接从动轮连接架,所述从动轮连接架呈平行四边形框架,并且从动轮连接架的平行四边形框架的每条边框在外力作用下均可以自由的活动从而改变平行四边形框架所在平行四边形的内角;
29.所述变位驱动电机通过齿轮和齿条驱动所述驱动杆进行前后移动,所述驱动杆的前后移动带动所述前压杆组件、中压杆组件或后压杆组件的前后移动从而实现所述前驱动轮ⅰ、前驱动轮ⅱ、后驱动轮ⅰ、后驱动轮ⅱ、前从动轮ⅱ、前从动轮ⅰ、后从动轮ⅰ以及后从动轮ⅱ的变位。
30.可选地,
31.所述清洗刷组件包括清洗刷和清洗刷电机,所述清洗刷电机通过锥齿轮带动四个所述清洗刷进行旋转清洗玻璃。
32.可选地,
33.所述行走装置包括行走轨道和行走电机。
34.可选地,
35.所述升降台装置包括升降架和载物平台,所述载物平台上设置有两个限位轨道,所述限位轨道包括两个限位杆以及由两个限位杆形成的放置驱动轮和从动轮的轮槽,所述前驱动轮ⅰ、前驱动轮ⅱ、前从动轮ⅰ、前从动轮ⅱ、后驱动轮ⅰ、后驱动轮ⅱ、后从动轮ⅰ和后从动轮ⅱ在所述限位轨道内进行运动。
36.可选地,
37.所述连栋玻璃温室顶部玻璃清洗系统还包括装置机架、电线缠绕辊、水管缠绕辊和控制系统,所述电线缠绕辊缠绕有供电电线,所述水管缠绕辊缠绕有供水软管,所述供电电线提供电力,所述供水软管提供水源;所述控制系统采用plc进行控制。
38.本发明实施例第二方面提供了一种连栋玻璃温室顶部玻璃清洗方,包括:
39.采用以上所述的一种连栋玻璃温室顶部玻璃清洗系统进行清洗栋玻璃温室顶部玻璃,其中连栋玻璃温室由多个呈倒v型的屋顶、多个天沟和多个遮阳网支撑杆。
40.一种连栋玻璃温室顶部玻璃清洗方法,包括以下步骤:
41.s1:将行走轨道设置在连栋玻璃温室的侧部,并调整好行走轨道与连栋玻璃温室的侧部之间的间距,启动行走电机,行走电机驱动行走装置进行行走,并带动升降台装置移动到第一个玻璃温室的侧部,并且此时升降台装置正对着第一个玻璃温室的侧部,关闭行走电机停止移动;
42.s2:启动升降架上升使得所述载物平台与所述天沟处于同一水平面,停止升降架上升,此时,轮槽正对着天沟;
43.s3:同时启动前驱动电机ⅰ、前驱动电机ⅱ、后驱动电机ⅰ和后驱动电机ⅱ,此时,所述前压杆组件的前连接光杆位于所述前滑槽的a端,所述后压杆组件的后连接光杆位于所述后滑槽的b端,所述中压杆组件的中连接光杆位于所述中滑槽最高端的中间部位,所述前驱动轮ⅰ、前驱动轮ⅱ、后驱动轮ⅰ和后驱动轮ⅱ与轮槽的地面接触进行移动,所述前从动轮ⅰ、前从动轮ⅱ、后从动轮ⅰ和后从动轮ⅱ脱离轮槽的地面,并且所述前从动轮ⅰ、前从动轮ⅱ、后从动轮ⅰ和后从动轮ⅱ偏离轮槽正上方;
44.保持前驱动电机ⅰ、前驱动电机ⅱ、后驱动电机ⅰ和后驱动电机ⅱ运行直至清洗装置的行走机构移动到天沟的沟面上;
45.s4:当所述前驱动轮ⅰ和前驱动轮ⅱ遇到遮阳网支撑杆时,开启所述变位驱动电机驱动驱动杆朝着前驱动轮ⅰ的方向运动直至所述前压杆组件的前连接光杆位于所述前滑槽的最高端c端,关闭变位驱动电机,此时所述前驱动轮ⅰ和前驱动轮ⅱ在前压杆组件的带动下处于收缩状态可以避开所述遮阳网支撑杆;
46.并且所述中压杆组件的中连接光杆位于所述中滑槽的低端,所述前从动轮ⅰ、前从动轮ⅱ、后从动轮ⅰ和后从动轮ⅱ呈伸展状态并且与天沟面接触,所述清洗装置在前从动轮ⅰ、前从动轮ⅱ、后从动轮ⅰ和后从动轮ⅱ以及后驱动轮ⅰ和后驱动轮ⅱ的作用下进行移动;
47.s5:当前从动轮ⅰ和前从动轮ⅱ遇到遮阳网支撑杆时,开启所述变位驱动电机驱动驱动杆朝着后驱动轮ⅰ的方向运动直至所述中压杆组件的中连接光杆位于所述中滑槽最高端中部,关闭所述变位驱动电机,此时前从动轮ⅰ、前从动轮ⅱ、后从动轮ⅰ和后从动轮ⅱ呈收缩状态可以避免所述遮阳网支撑杆,同时所述前驱动轮ⅰ、前驱动轮ⅱ、后驱动轮ⅰ和后驱动轮ⅱ与轮槽的地面接触进行移动;
48.s6:后驱动轮ⅰ和后驱动轮ⅱ遇到遮阳网支撑杆时,启动所述变位驱动电机带动驱动杆朝着后驱动轮ⅰ的方向运动直至所述后压杆组件的后连接光杆位于所述后滑槽的最高端d端,关闭变位驱动电机,此时后驱动轮ⅰ和后驱动轮ⅱ呈收缩状态可以避开所述遮阳网支撑杆,同时所述前驱动轮ⅰ、前驱动轮ⅱ、前从动轮ⅰ、前从动轮ⅱ、后从动轮ⅰ和后从动轮ⅱ呈伸展状态并且与天沟面接触;
49.s7:清洗装置继续前进,直至遇到下一个遮阳网支撑杆时,重复s4-s6;
50.s8:清洗装置清洗完玻璃温室顶部玻璃后返回到所述载物平台上;清洗装置在返回到所述载物平台上同样避开遮阳网支撑杆;
51.s9:控制升降架下降到最底部,然后启动行走电机,驱动升降台装置行走到下一个
玻璃温室,重复s1-s8;
52.s10:连栋玻璃温室顶部玻璃清洗完毕;
53.其中,在s2-s8中清洗刷电机一直为开启状态对玻璃进行清洗,供水软管呈供水状态。
54.本发明实施例提供的技术方案中,一种连栋玻璃温室顶部玻璃清洗系统及清洗方法,相对于现有技术,本发明实施例的有益效果为:
55.(1)该装置通过一个动力输出(变位驱动电机)经前后移动结构滑槽与机架滑槽(控制结构件包括方形管和驱动杆,所述方形管的管身依次设置前滑槽、中滑槽和后滑槽)的作用,实现6个位置(前驱动轮ⅰ和ⅱ、后驱动轮ⅰ和ⅱ、前后从动轮ⅰ和ⅱ)的上下往复运动效果,大大减少了驱动动力数量,减小了控制压力,保证传动质量,使结构更简单。
56.(2)该装置通过平行四边形机构实现驱动轮、从动轮的伸展与收缩,很好的使各位置驱动轮或者从动轮及时避开清洗装置行进轨迹上的遮阳网支撑立柱。
57.(3)该装置的4驱动轮 4从动轮结构使前驱动轮、中间从动轮、后驱动轮依次收缩避开行进轨迹上的遮阳网支撑立柱,在每一种状态中,同时至少4个轮与温室天沟底面接触,至少2个轮是驱动轮。
58.(4)该装置从动轮设置4个,保证整机中心始终在与温室天沟底面接触的2个驱动驱动轮与从动轮之间,保证整机在各种工作状态下行走过程无歪倾趋势,稳定可靠。
附图说明
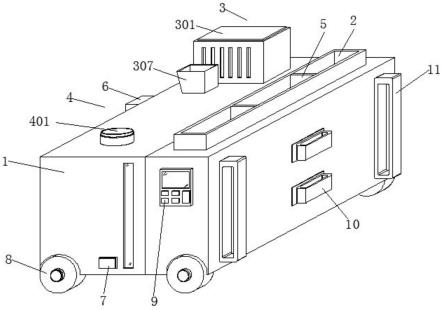
59.图1为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统(清洗装置在升降台装置上)结构示意图;
60.图2为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统(清洗装置在玻璃温室顶部)结构示意图;
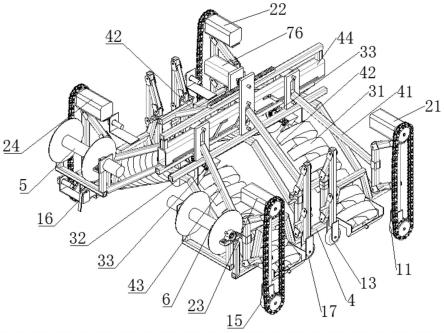
61.图3为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统清洗装置第一视角结构示意图;
62.图4为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统清洗装置第二视角结构示意图;
63.图5为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统清洗装置变位机构结构示意图;
64.图6为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统清洗装置控制结构件结构示意图;
65.图7为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统清洗装置前压杆组件结构示意图;
66.图8为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统清洗装置中压杆组件结构示意图;
67.图9为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统清洗装置后压杆组件结构示意图;
68.图10为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统清洗装置前从动轮、前从动轮ⅱ、后从动轮ⅰ和后从动轮ⅱ收缩状态结构示意图;
69.图11为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统清洗装置前驱动轮ⅰ和前驱动轮ⅱ收缩状态结构示意图;
70.图12为本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统清洗装置后驱动轮ⅰ和后驱动轮ⅱ收缩状态结构示意图;
71.1-清洗装置;2-升降台装置;3-行走装置;11-前驱动轮ⅰ;12-前驱动轮ⅱ;13-前从动轮ⅰ;14-前从动轮ⅱ;15-后驱动轮ⅰ;16-后驱动轮ⅱ;17-后从动轮ⅰ;18-后从动轮ⅱ;21-前驱动电机ⅰ;22-前驱动电机ⅱ;23-后驱动电机ⅰ;24-后驱动电机ⅱ;41-前压杆组件;42-中压杆组件;43-后压杆组件;44-控制结构件;51-前连接杆ⅰ;52-前连接杆ⅱ;53-前连接光杆;54-前连接轴承;55-前方形滑块;81-后连接杆ⅰ;82-后连接杆ⅱ;83-后连接光杆;84-后连接轴承;85-后方形滑块;61-中连接杆ⅰ;62-中连接杆ⅱ;63-中连接光杆;64-中连接轴承;65-中方形滑块;71-方形管;72-驱动杆;73-前滑槽;74-中滑槽;75-后滑槽;76-变位驱动电机;91-驱动轮连接架;92-从动轮连接架;31-清洗刷;32-清洗刷电机33-锥齿轮;34-行走轨道;35-行走电机;36-升降架;37-载物平台;39-限位轨道;4-机架;5-电线缠绕辊;6-水管缠绕辊;7-屋顶;8-天沟;9-遮阳网支撑杆。
具体实施方式
72.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
73.请参阅图1-12,本发明实施例中一种连栋玻璃温室顶部玻璃清洗系统一个实施例包括:
74.清洗装置1、升降台装置2和行走装置3;
75.所述行走装置3用于所述升降台装置2的移动行走;
76.所述升降台装置2用于放置所述清洗装置1,并且所述清洗装置1跟随所述升降台装置2的移动行走而进行移动行走;
77.所述清洗装置1可以从所述升降台装置2离开移动到洗玻璃温室顶部,所述清洗装置1用于清洗玻璃温室顶部玻璃,并且所述清洗装置1可以移动的进行清洗玻璃温室顶部玻璃。
78.在一个可选地实施例中,
79.所述清洗装置1包括行走机构、清洗刷组件和变位机构;
80.所述行走机构用于所述清洗装置在温室顶部的行走移动;
81.所述清洗刷组件用于温室顶部玻璃的清洗;
82.所述变位机构用于改变所述行走机构的位置以规避所述行走机构在行走过程中遇到的障碍物。
83.在一个可选地实施例中,
84.所述行走机构包括前驱动轮ⅰ(11)、前驱动轮ⅱ(12)、前从动轮ⅰ(13)、前从动轮ⅱ(14)、后驱动轮ⅰ(15)、后驱动轮ⅱ(16)、后从动轮ⅰ(17)和后从动轮ⅱ(18);
85.所述前驱动轮ⅰ(11)通过前驱动电机ⅰ(21)进行驱动,所述前驱动轮ⅱ(12)通过前
驱动电机ⅱ(22)进行驱动,所述后驱动轮ⅰ(15)通过后驱动电机ⅰ(23)进行驱动,所述后驱动轮ⅱ(16)通过后驱动电机ⅱ(24)进行驱动;
86.所述前驱动电机ⅰ(21)通过链条和链轮驱动所述前驱动轮ⅰ(11);
87.所述前驱动电机ⅱ(22)通过链条和链轮驱动所述前驱动轮ⅱ(12);
88.所述后驱动电机ⅰ(23)通过链条和链轮驱动所述后驱动轮ⅰ(15);
89.所述后驱动电机ⅱ(24)通过链条和链轮驱动所述后驱动轮ⅱ(16)。
90.在一个可选地实施例中,
91.所述变位机构包括前压杆组件41、中压杆组件42、后压杆组件43以及控制所述前压杆组件41、中压杆组件42和后压杆组件43上升或下降的控制结构件44;
92.所述前压杆组件41和所述后压杆组件43的结构相同,所述前压杆组件41包括前连接杆ⅰ51、前连接杆ⅱ52、前连接光杆53、两个前连接轴承54和两个前方形滑块55,所述后压杆组件43包括后连接杆ⅰ81、后连接杆ⅱ82、后连接光杆83、两个后连接轴承84和两个后方形滑块85;
93.所述中压杆组件42包括中连接杆ⅰ61、中连接杆ⅱ62、中连接光杆63、两个中连接轴承64和两个中方形滑块65;
94.所述控制结构件44包括方形管71和驱动杆72,所述方形管71的管身依次设置前滑槽73、中滑槽74和后滑槽75,所述前滑槽73、中滑槽74和后滑槽75均穿透所述方形管71的管身,所述前连接光杆53穿过所述前滑槽73,所述中连接光杆63穿过所述中滑槽74,所述后连接光杆83穿过所述后滑槽75;
95.所述驱动杆72固定连接到所述方形管71的上部,所述驱动杆72通过变位驱动电机76驱动进行前后移动;
96.所述前连接杆ⅰ51、前连接杆ⅱ52、后连接杆ⅰ81和后连接杆ⅱ82前端均活动连接驱动轮连接架91,所述驱动轮连接架91呈平行四边形框架,并且驱动轮连接架91的平行四边形框架的每条边框在外力作用下均可以自由的活动从而改变平行四边形框架所在平行四边形的内角;
97.所述中连接杆ⅰ61和中连接杆ⅱ62前端均活动连接从动轮连接架92,所述从动轮连接架92呈平行四边形框架,并且从动轮连接架92的平行四边形框架的每条边框在外力作用下均可以自由的活动从而改变平行四边形框架所在平行四边形的内角;
98.所述变位驱动电机76通过齿轮和齿条驱动所述驱动杆72进行前后移动,所述驱动杆72的前后移动带动所述前压杆组件41、中压杆组件42或后压杆组件43的前后移动从而实现所述前驱动轮ⅰ11、前驱动轮ⅱ12、后驱动轮ⅰ15、后驱动轮ⅱ16、前从动轮ⅱ14、前从动轮ⅰ13、后从动轮ⅰ17以及后从动轮ⅱ18的变位。
99.在一个可选地实施例中,
100.所述清洗刷组件包括清洗刷31和清洗刷电机32,所述清洗刷电机32通过锥齿轮33带动四个所述清洗刷31进行旋转清洗玻璃。
101.在一个可选地实施例中,
102.所述行走装置3包括行走轨道34和行走电机35。
103.在一个可选地实施例中,
104.所述升降台装置2包括升降架36(升降架可以采用液压缸、气缸、电动伸缩杆等可
以控制升降的装置)和载物平台37,所述载物平台37上设置有两个限位轨道39,所述限位轨道39包括两个限位杆以及由两个限位杆形成的放置驱动轮和从动轮的轮槽,所述前驱动轮ⅰ11、前驱动轮ⅱ12、前从动轮ⅰ13、前从动轮ⅱ14、后驱动轮ⅰ15、后驱动轮ⅱ16、后从动轮ⅰ17和后从动轮ⅱ18在所述限位轨道39内进行运动。
105.在一个可选地实施例中,
106.所述连栋玻璃温室顶部玻璃清洗系统还包括装置机架4、电线缠绕辊5、水管缠绕辊6和控制系统,所述电线缠绕辊5缠绕有供电电线,所述水管缠绕辊6缠绕有供水软管,所述供电电线提供电力,所述供水软管提供水源;所述控制系统采用plc进行控制。
107.上面对本发明实施例中的一种连栋玻璃温室顶部玻璃清洗系统进行了描述,下面对本发明实施例中的一种连栋玻璃温室顶部玻璃清洗方法进行描述,请参阅图,本发明实施例中一种连栋玻璃温室顶部玻璃清洗方法一个实施例包括:
108.采用以上所述的一种连栋玻璃温室顶部玻璃清洗系统进行清洗栋玻璃温室顶部玻璃,其中连栋玻璃温室由多个呈倒v型的屋顶(7)、多个天沟(8)和多个遮阳网支撑杆(9)。
109.一种连栋玻璃温室顶部玻璃清洗方法,包括以下步骤:
110.s1:将行走轨道(34)设置在连栋玻璃温室的侧部,并调整好行走轨道与连栋玻璃温室的侧部之间的间距,启动行走电机(35),行走电机(35)驱动行走装置(3)进行行走,并带动升降台装置(2)移动到第一个玻璃温室的侧部,并且此时升降台装置(2)正对着第一个玻璃温室的侧部,关闭行走电机停止移动;
111.s2:启动升降架(36)上升使得所述载物平台(37)与所述天沟(8)处于同一水平面,停止升降架(36)上升,此时,轮槽正对着天沟;
112.s3:同时启动前驱动电机ⅰ(21)、前驱动电机ⅱ(22)、后驱动电机ⅰ(23)和后驱动电机ⅱ(24),此时,所述前压杆组件(41)的前连接光杆(53)位于所述前滑槽(73)的a端,所述后压杆组件(43)的后连接光杆位于所述后滑槽(75)的b端,所述中压杆组件(42)的中连接光杆位于所述中滑槽(74)最高端的中间部位,所述前驱动轮ⅰ(11)、前驱动轮ⅱ(12)、后驱动轮ⅰ(15)和后驱动轮ⅱ(16)与轮槽的地面接触进行移动,所述前从动轮ⅰ(13)、前从动轮ⅱ(14)、后从动轮ⅰ(17)和后从动轮ⅱ(18)脱离轮槽的地面,并且所述前从动轮ⅰ(13)、前从动轮ⅱ(14)、后从动轮ⅰ(17)和后从动轮ⅱ(18)偏离轮槽正上方;
113.保持前驱动电机ⅰ(21)、前驱动电机ⅱ(22)、后驱动电机ⅰ(23)和后驱动电机ⅱ(24)运行直至清洗装置的行走机构移动到天沟的沟面上;
114.s4:当所述前驱动轮ⅰ(11)和前驱动轮ⅱ(12)遇到遮阳网支撑杆(9)时,开启所述变位驱动电机(76)驱动驱动杆(72)朝着前驱动轮ⅰ的方向运动直至所述前压杆组件(41)的前连接光杆位于所述前滑槽(73)的最高端c端,关闭变位驱动电机(76),此时所述前驱动轮ⅰ(11)和前驱动轮ⅱ(12)在前压杆组件的带动下处于收缩状态可以避开所述遮阳网支撑杆(9);
115.并且所述中压杆组件(42)的中连接光杆位于所述中滑槽(74)的低端,所述前从动轮ⅰ(13)、前从动轮ⅱ(14)、后从动轮ⅰ(17)和后从动轮ⅱ(18)呈伸展状态并且与天沟面接触,所述清洗装置在前从动轮ⅰ(13)、前从动轮ⅱ(14)、后从动轮ⅰ(17)和后从动轮ⅱ(18)以及后驱动轮ⅰ(15)和后驱动轮ⅱ(16)的作用下进行移动;
116.s5:当前从动轮ⅰ(13)和前从动轮ⅱ(14)遇到遮阳网支撑杆(9)时,开启所述变位
驱动电机(76)驱动驱动杆(72)朝着后驱动轮ⅰ的方向运动直至所述中压杆组件(42)的中连接光杆位于所述中滑槽(74)最高端中部,关闭所述变位驱动电机(76),此时前从动轮ⅰ(13)、前从动轮ⅱ(14)、后从动轮ⅰ(17)和后从动轮ⅱ(18)呈收缩状态可以避免所述遮阳网支撑杆(9),同时所述前驱动轮ⅰ(11)、前驱动轮ⅱ(12)、后驱动轮ⅰ(15)和后驱动轮ⅱ(16)与轮槽的地面接触进行移动;
117.s6:后驱动轮ⅰ(15)和后驱动轮ⅱ(16)遇到遮阳网支撑杆(9)时,启动所述变位驱动电机(76)带动驱动杆(72)朝着后驱动轮ⅰ的方向运动直至所述后压杆组件(43)的后连接光杆位于所述后滑槽(75)的最高端d端,关闭变位驱动电机(76),此时后驱动轮ⅰ(15)和后驱动轮ⅱ(16)呈收缩状态可以避开所述遮阳网支撑杆(9),同时所述前驱动轮ⅰ(11)、前驱动轮ⅱ(12)、前从动轮ⅰ(13)、前从动轮ⅱ(14)、后从动轮ⅰ(17)和后从动轮ⅱ(18)呈伸展状态并且与天沟面接触;
118.s7:清洗装置继续前进,直至遇到下一个遮阳网支撑杆(9)时,重复s4-s6;
119.s8:清洗装置清洗完玻璃温室顶部玻璃后返回到所述载物平台(37)上;清洗装置在返回到所述载物平台(37)上同样避开遮阳网支撑杆(9);
120.s9:控制升降架(36)下降到最底部,然后启动行走电机(35),驱动升降台装置(2)行走到下一个玻璃温室,重复s1-s8;
121.s10:连栋玻璃温室顶部玻璃清洗完毕;
122.其中,在s2-s8中清洗刷电机(32)一直为开启状态对玻璃进行清洗,供水软管呈供水状态。
123.在这一实施例中s1-s10的操作顺序并非按照从前到后的顺序进行,例如步骤s2可以在s1之前进行。
124.实施例1
125.表1实施例1中用到的电机
126.[0127][0128]
表2实施例1中用到的传感器
[0129]
[0130][0131]
4个前后驱动轮、4个从动轮均在玻璃温室天沟底面内沿着天沟行走。
[0132]
电机1-4(分别指前驱动电机ⅰ和ⅱ、后驱动电机ⅰ和ⅱ)通过链传动使驱动轮转动。
[0133]
电机5(变位驱动电机)通过齿轮齿条传动驱动前后移动结构往复运动。
[0134]
电机9(清洗刷电机)通过锥齿轮传动驱动4个清洗刷转动。
[0135]
利用齿轮齿条传动带动前后移动结构向清洗装置前进方向移动,前压杆组件41、中压杆组件42和后压杆组件43的两侧对称的光杆部位分别安装在前后移动结构的三部分滑槽中(前滑槽、中滑槽和后滑槽),为了减少阻力,可以在光杆部位安装轴承之后与前后移动结构滑槽配合,前压杆组件41、中压杆组件42和后压杆组件43的光杆部位两侧的方形滑块位于机架高度方向的滑槽10(10-机架高度方向的滑槽)内,前压杆组件41、中压杆组件42和后压杆组件43在前后移动结构带动下,沿着前后移动结构滑槽与机架滑槽分别做仿形运动,绝对运动为沿机架滑槽上下运动,实现前压杆组件41、中压杆组件42和后压杆组件43在竖直方向上升与下降,控制平行四边形结构(平行四边形框架)伸展与收缩,带动主从动轮伸展与收缩,以避开行进轨迹上的遮阳网支撑立柱。
[0136]
工作过程:
[0137]
按下开始按钮,
[0138]
升降台装置中的载物平台升至预设位置,使载物平台上的清洗装置行走轮(驱动轮和从动轮)所在平面与天沟底面平齐,然后,电机6正转,升降台装置开始行走,当升降台上的u槽型传感器遇到位于温室上的遮挡片,升降台装置到达第一跨清洗位置,电机6停止;
[0139]
之后,清洗装置前进时,电机1-4带动驱动轮转动使装置前进,电机7,电机8转动,使安装在清洗装置上的水管缠绕辊、电线缠绕辊转动,随清洗装置行进不断将水管、电线从辊上放下来,同时电机9驱动4个清洗刷转动,清洗玻璃;清洗装置退回时,电机7,电机8反向转动,使安装在清洗装置上的水管缠绕辊、电线缠绕辊反向转动,使水管(供水软管)、供电电线随清洗装置退回时不断将水管、电线缠绕至水管缠绕辊、电线缠绕辊上,同时电机9驱动4个毛刷(毛刷是指清洗刷)与前进时同向转动,清洗玻璃。
[0140]
清洗装置前进时,主从动轮(主从动轮是指前从动轮ⅰ、ⅱ和后从动轮ⅰ、ⅱ)避开温室上遮阳网支撑立柱的动作过程,(1)当所有避障光电传感器均没有感应到遮阳网支撑立柱(遮阳网支撑柱)时,前后移动结构(前压杆和后压杆)位于初始位置,此时,前压杆组件与后压杆组件控制的平行四边形机构均呈伸展状态,带动前后驱动轮与天沟底面接触,驱动机体前进,中压杆组件控制的平行四边形结构呈收缩状态,带动从动轮收缩,脱离与天沟底面接触的行进轨迹,如图10所示;(2)当清洗装置前驱动轮前部的避障光电传感器1感应到遮阳网支撑立柱,电机5正转,前后移动结构由初位置向清洗装置前进方向移动,在前后移
动结构滑槽(指前滑槽、后滑槽或中滑槽)与机架高度方向的滑槽10作用下,首先中压杆组件下降,其控制的平行四边形结构由收缩状态开始伸展,带动从动轮向天沟底面靠近直至接触停止,之后前压杆组件上升,其控制的平行四边形结构由伸展状态开始收缩,带动前驱动轮完全避开行进中遮阳网支撑立柱的阻挡,电机5停止,后压杆组件保持状态不变,控制其平行四边形结构处于伸展状态,后驱动轮一直与天沟底面接触使机体前进,如图11所示;(3)当清洗装置前驱动轮与从动轮之间的避障光电传感器2感应到遮阳网支撑立柱,电机5反转,前后移动结构返回至初始位置,在前后移动结构滑槽与机架滑槽作用下,首先前压杆组件下降,其控制的平行四边形结构由收缩状态开始伸展,带动前驱动轮向天沟底面靠近直至接触停止,之后中压杆组件上升,其控制的平行四边形结构由伸展状态开始收缩,带动从动轮完全避开行进中遮阳网支撑立柱的阻挡,电机5停止,后压杆组件保持状态不变,控制其平行四边形机构处于伸展状态,后驱动轮一直与天沟底面接触使机体前进,如图12所示;(4)当清洗装置从动轮与后驱动轮之间的避障光电传感器3感应到遮阳网支撑立柱,电机5反转,前后移动结构从初始位置向清洗装置前进方向相反方向移动,在前后移动结构滑槽与机架滑槽作用下,首先中压杆组件下降,其控制的平行四边形结构由收缩状态开始伸展,带动从动轮靠近天沟底面至接触停止,之后,后压杆组件上升,其控制的平行四边形结构由伸展状态开始收缩,带动后驱动轮完全避开行进中遮阳网支撑立柱的阻挡,电机5停止,前压杆组件保持状态不变,控制其平行四边形结构处于伸展状态,前驱动轮一直与天沟底面接触使机体前进;(5)当清洗装置后驱动轮之后的避障光电传感器4感应到遮阳网支撑立柱,电机5正转,前后移动结构返回至初始位置,在前后移动结构滑槽与机架滑槽作用下,首先后压杆组件下降,控制其平行四边形结构由收缩状态开始伸展,带动后驱动轮靠近天沟底面直至接触停止,之后,中压杆组件上升,控制其平行四边形机构由伸展状态开始收缩,带动从动轮脱离天沟底面向机体收缩,电机5停止,前压杆组件状态保持不变,控制其平行四边形结构处于伸展状态,前驱动轮一直与天沟底面接触使机体前进。至此,清洗装置实现不停车避开遮阳网支撑立柱完成同一跨温室前进的清洗作业,在前进过程中感应到遮阳网支撑立柱时,其动作相同。
[0141]
当清洗装置上的限位开关3碰到温室上设置的阻挡物时,电机1-4,电机7、电机8、电机9停止,然后清洗装置退回时,电机1-4带动驱动轮转动使装置后退,同时电机7、电机8反转,电机9正转。
[0142]
清洗装置退回时,主从动轮避开温室上遮阳网支撑立柱的动作过程,(1)当所有避障光电传感器均没有感应到遮阳网支撑立柱时,主从动轮状态同前进时一样;(2)当清洗装置后驱动轮后部的避障光电传感器4感应到遮阳网支撑立柱,电机5反转,前后移动结构由初位置向清洗装置退回方向移动,在前后移动结构滑槽与机架滑槽作用下,首先中压杆组件下降,其控制的平行四边形结构由收缩状态开始伸展,带动从动轮向天沟底面靠近直至接触停止,之后后压杆组件上升,其控制的平行四边形结构由伸展状态开始收缩,带动前驱动轮完全避开行进中遮阳网支撑立柱的阻挡,电机5停止,前压杆组件保持状态不变,控制其平行四边形结构处于伸展状态,后驱动轮一直与天沟底面接触使机体前进;(3)当清洗装置后驱动轮与从动轮之间的避障光电传感器3感应到遮阳网支撑立柱,电机5正转,前后移动结构返回至初始位置,在前后移动结构滑槽(控制结构件上的前滑槽、中滑槽和后滑槽)与机架滑槽(机架滑槽是指机架高度方向的滑槽10)作用下,首先后压杆组件下降,其控制
的平行四边形结构由收缩状态开始伸展,带动后驱动轮向天沟底面靠近直至接触停止,之后中压杆组件上升,其控制的平行四边形结构由伸展状态开始收缩,带动从动轮完全避开行进中遮阳网支撑立柱的阻挡,电机5停止,前压杆组件保持状态不变,控制其平行四边形机构处于伸展状态,前驱动轮一直与天沟底面接触使机体前进;(4)当清洗装置从动轮与前驱动轮之间的避障光电传感器2感应到遮阳网支撑立柱,电机5正转,前后移动结构从初始位置向清洗装置退回方向相反方向移动,在前后移动结构滑槽与机架滑槽作用下,首先中压杆组件下降,其控制的平行四边形结构由收缩状态开始伸展,带动从动轮靠近天沟底面至接触停止,之后,前压杆组件上升,其控制的平行四边形结构由伸展状态开始收缩,带动前驱动轮完全避开行进中遮阳网支撑立柱的阻挡,电机5停止,后压杆组件保持状态不变,控制其平行四边形结构(平行四边形结构是指平行四边形框架)处于伸展状态,后驱动轮一直与天沟底面接触使机体前进;(5)当清洗装置前驱动轮之前的避障光电传感器1感应到遮阳网支撑立柱,电机5反转,前后移动结构返回至初始位置,在前后移动结构滑槽与机架滑槽作用下,首先前压杆组件下降,控制其平行四边形结构由收缩状态开始伸展,带动前驱动轮靠近天沟底面直至接触停止,之后,中压杆组件上升,控制其平行四边形机构由伸展状态开始收缩,带动从动轮脱离天沟底面向机体收缩,电机5停止,后压杆组件状态保持不变,控制其平行四边形结构处于伸展状态,前驱动轮一直与天沟底面接触使机体前进。至此,清洗装置实现不停车退回避开遮阳网支撑立柱完成同一跨温室退回过程的第二次清洗作业。
[0143]
当清洗装置限位开关2碰到升降台(升降台是指升降台装置)上的阻挡物,电机1-4,电机7、电机8、电机9停止,退回至升降台过程结束。
[0144]
然后电机6正转,升降台继续行走,当u槽型传感器遇到遮挡片,电机6停止,之后重复前进与退回时的清洗过程。
[0145]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。