1.本发明涉及港口自动化设备技术领域,具体地说,涉及一种下放过程进行防护的龙门吊吊具及其防护方法。
背景技术:
2.随着港口贸易日益繁荣,港口的集装箱堆积负荷也越来越大,对于集装箱吊装作业效率的需求也逐渐提高。在目前的集装箱吊装作业中,由于集装箱摆放位置会有不同程度上的偏差,从而导致吊具作业过程中下放的空间环境非常有限,极易与吊具下放区域内的集装箱发生碰撞。
3.在专利cn111043957a-一种轮廓点云坐标采集方法中解决了大尺寸构件,尤其是复杂异型构件检测效率低、设备研制成本高等问题,提供一种轮廓点云坐标采集方法,提高轮廓点云坐标数据采集效率、降低系统研制成本。但是视觉跟踪装置固定于地面,跟踪并高频采集轮廓点采集装置表面的标记点坐标信息,求得轮廓点采集装置相比视觉跟踪装置的位姿关系,该技术方案中视觉跟踪装置在地面,对标记点坐标信息采集不准确,无法用于货物摆放中。
4.因此,如何避免吊具作业过程中发生刮蹭碰撞是目前港口作业中待解决的难题之一。
技术实现要素:
5.有鉴于此,本发明提出一种下放过程进行防护的龙门吊吊具及其防护方法,利用激光雷达对吊具下方实时扫描并且对吊具下方的障碍物点云坐标进行计算和分析,避免吊具与其下放区域内的障碍物碰撞。
6.本发明的技术方案是这样实现的:一种下放过程进行防护的龙门吊吊具,其包括龙门吊主体、钢丝、吊具和plc控制器,其中,钢丝位于龙门吊主体与吊具之间,龙门吊主体通过plc控制器驱动一个电机收放钢丝,实现吊具的升降,并且驱动另一个或多个电机使吊具在水平方向移动;所述吊具包括吊具上架、吊具下架和若干激光雷达,所述吊具下架位于吊具远离龙门吊主体的一侧,吊具下架每个侧面至少设置一个激光雷达,若干激光雷达均朝向吊具远离龙门吊主体的一侧进行扫描。
7.在以上技术方案的基础上,优选的,吊具下架为长方体,吊具下架远离龙门吊主体的一侧与地面平行,钢丝绳远离龙门吊主体的一端固定设置在吊具下架上。
8.在以上技术方案的基础上,优选的,吊具下架包括两个长侧面和两个短侧面,每个所述短侧面上均设置一个激光雷达,每个所述长侧面上均设置两个激光雷达。
9.在以上技术方案的基础上,优选的,每个所述长侧面上,其中一个激光雷达设置在该长侧面的一端,另一个激光雷达设置在该长侧面的另一端;每个所述短侧面上的激光雷达固定设置在短侧面的中心位置,若干激光雷达位于同一平面内。
10.在以上技术方案的基础上,优选的,若干所述激光雷达为单线激光雷达或多线激
光雷达或面阵激光雷达。
11.一种下放过程进行防护的龙门吊吊具的防护方法:
12.若干所述激光雷达对吊具下方进行扫描,障碍物形成点云坐标,通过算法分析障碍物点云坐标的位置信息与吊具下放区域是否重叠,判断吊具在下放区域内是否发生碰撞,通过tcp通讯的方式发送吊具的移动信息到plc控制器,plc控制器驱动吊具继续下放或急停或避让。
13.在以上技术方案的基础上,优选的,选择吊具下架中心为原点,平行于长侧面为y轴所在方向,平行于短侧面为x轴所在方向,垂直于吊具为z轴所在方向,并且确定x、y、z轴的正方向。
14.若要将激光雷达的点云坐标系旋转至于吊具坐标系中,需要对三维旋转的欧拉角进行求解,即俯仰角、偏航角、滚转角。本发明以集装箱作为标定标靶,通过吊具上的激光雷达采集集装箱竖直面以及地面的点云信息,通过点云算法求出两个面的法向量,通过两组法向量即可求解出俯仰角、偏航角、滚转角,从而得出旋转变化r,在以上技术方案的基础上,优选的,任意一个所述激光雷达扫描采集到竖直平面(nz)与水平面(ny)的点云坐标,nz、ny分别为竖直平面与水平面的法向量,绕x、y、z轴旋转的欧拉角度为α、γ、β,通过ny与吊具坐标系y轴方向向量(0,1,0)求解γ、β的值,通过nz与吊具坐标系z轴方向矢量(0,0,1)求解α、β的值,计算出欧拉角α、γ、β的值以及对应的矩阵旋转变换r;测量每个所述激光雷达与原点的位置,得到x/y/z三个方向上的平移分量,从而得出每个所述激光雷达所对应的点云坐标平移变换t。
15.在以上技术方案的基础上,优选的,每个所述激光雷达扫描采集的点云经过矩阵旋转变换r以及平移变换t得到吊具坐标系坐标。
16.将激光雷达扫描得到的障碍物点云坐标转换为在吊具坐标系中的障碍物坐标区,所述吊具下放区域为安全围栏区域,安全围栏区域在吊具坐标系中对应安全围栏坐标区,判断障碍物坐标区与安全围栏坐标区之间的关系,若障碍物坐标区在安全围栏坐标区内或有重叠的部分,则吊具继续下放会发生碰撞,若障碍物坐标区在安全围栏坐标区不重叠,则吊具继续下放不会发生碰撞。
17.本发明的一种下放过程进行防护的龙门吊吊具及其防护方法相对于现有技术具有以下有益效果:
18.(1)吊具下架每个侧面至少设置一个激光雷达,激光雷达扫描范围更广,得到的障碍物位置精度更高;
19.(2)吊具下架上安装的单线或多线或面阵激光雷达对吊具下方进行实时扫描,并且运用点云算法提前预判吊具下放过程中是否会发生碰撞,起到提前预判的效果;
20.(3)采用tcp通讯方式对plc控制器下达指令,传输准确,实时性更强;
21.(4)通过plc控制器下达指令驱动吊具水平移动或向上移动,精确度更高,减小了吊具发生碰撞的风险。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
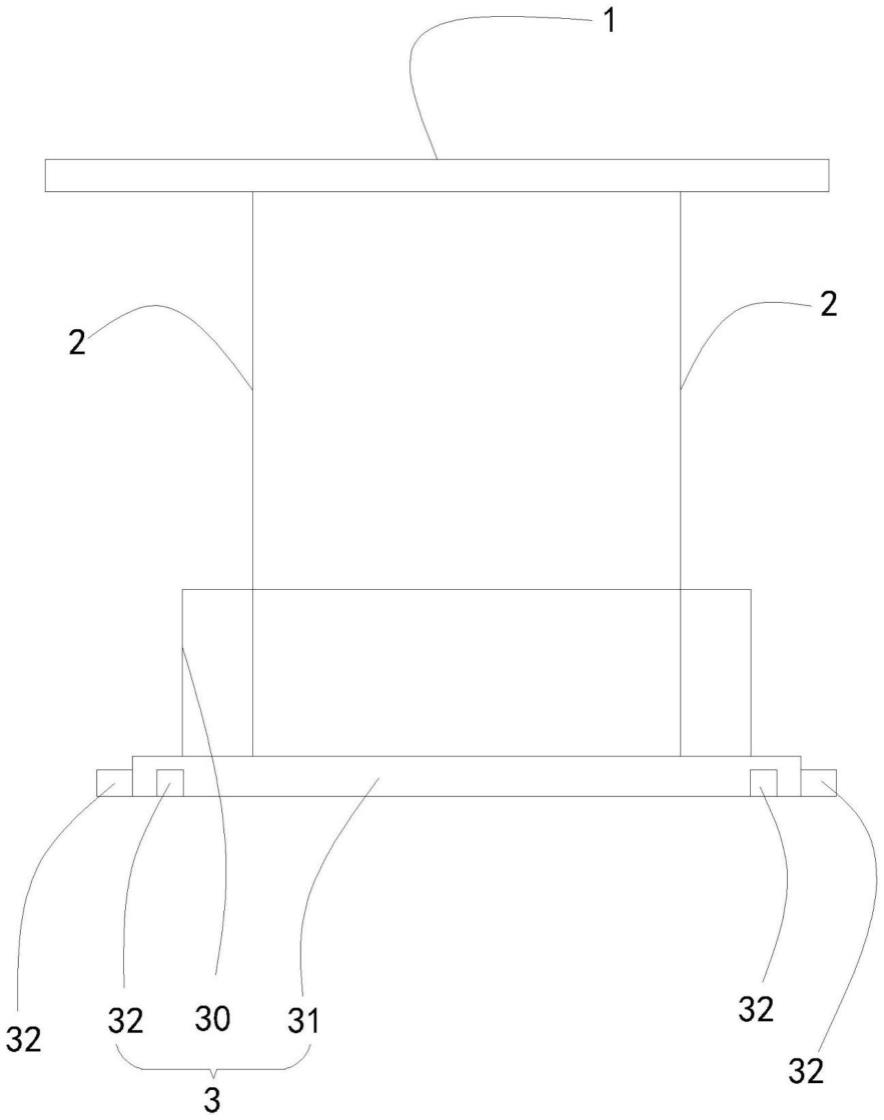
23.图1为本发明一种下放过程进行防护的龙门吊吊具的主视图;
24.图2为本发明吊具下架的仰视图;
25.图3为激光雷达矩阵旋转变换r的求解示意图。
具体实施方式
26.下面将结合本发明实施方式,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
27.如图1-2所示,一种下放过程进行防护的龙门吊吊具,其包括龙门吊主体1、钢丝2、吊具3和plc控制器。
28.其中,钢丝2位于龙门吊主体1与吊具3之间,龙门吊主体1通过plc控制器驱动电机进行收放钢丝2,实现吊具3的升降。本专利所采用的plc控制器驱动电机正反转实现收放钢丝绳,驱动另外一个或多个电机使吊具3在水平面内移动,上述plc控制器以及电机均属于现有技术,本领域技术人员很容易实现。此处,不再过多的赘述。
29.吊具3,如图1-3所示,包括吊具上架30、吊具下架31和若干激光雷达32,所述吊具下架31位于吊具3远离龙门吊主体1的一侧,若干激光雷达32固定设置在吊具下架31上,若干激光雷达32均朝向吊具3远离龙门吊主体1的一侧进行扫描。
30.作为一种优选的实施方式,若干所述激光雷达32为单线雷达或多线雷达或面阵雷达,单线雷达或多线雷达或面阵雷达均可以实现本技术方案中障碍物点云坐标的获取,可以根据实际需求进行选择。
31.作为一种优选的实施方式,吊具下架31为长方体,吊具下架31远离龙门吊主体1的一侧与地面平行,钢丝2远离龙门吊主体1的一端固定设置在吊具上架30上,吊具下架31的下方为地面,因此视野更好且不会出现遮挡的情况。
32.作为一种优选的实施方式,吊具下架31包括两个长侧面311和两个短侧面312,每个所述短侧面312上均设置一个激光雷达32,每个所述长侧面311上均设置两个激光雷达32,激光雷达32均设置在吊具下架31的侧面。
33.作为一种优选的实施方式,每个所述长侧面311上,其中一个激光雷达32设置在该长侧面311的一端,另一个激光雷达32设置在该长侧面311的另一端,此时,激光雷达32扫描的范围最大;每个所述短侧面312上的激光雷达32固定设置在短侧面312的中心位置,激光雷达32关于短侧面312左右对称,扫描精确性更高,若干激光雷达32位于同一平面内,便于对障碍物点云坐标进行计算和变换。
34.以下介绍本发明一种下放过程进行防护的龙门吊吊具及其防护方法:
35.s1,建立吊具坐标系:
36.选择吊具下架31中心为原点,平行于长侧面311为y轴方向,平行于短侧面312为x轴方向,垂直于吊具下架31为z轴方向,如图3所示,由原点向左为x轴正方向,由原点垂直于指向图3内的方向为y轴正方向,向上为z轴的正方向。
37.s2,将激光雷达点云坐标矩阵旋转变换r:
38.如图3所示,任意一个所述激光雷达32扫描采集到竖直平面nz与水平面ny的点云坐标,nz、ny分别为竖直平面与水平面的法向量,绕x、y、z轴旋转的欧拉角度为α、γ、β,通过ny与吊具坐标系y轴方向向量(0,1,0)求解γ、β的值,通过nz与吊具坐标系z轴方向矢量(0,0,1)求解α、β的值,计算出欧拉角α、γ、β的值以及对应的矩阵旋转变换r,每个激光雷达32都能扫描到两个互相垂直的平面,通过一个平面的法向量可以求出欧拉角中的两个角度,两个互相垂直的平面可以求出四个角度(有一个角度是重复的),根据3个欧拉角度即可计算出矩阵旋转变化r。
39.依此方法将本实施例中6个激光雷达32的障碍物点云坐标系进行矩阵旋转变换r。
40.s3,激光雷达点云平移变换t:
41.通过测量每个激光雷达32与原点的位置,得到x/y/z三个方向上的平移分量,从而得出平每个激光雷达32所对应的点云坐标平移变换t。
42.s4,激光雷达的点云坐标转换为吊具坐标:
43.每个所述激光雷达32扫描采集的障碍物点云坐标经过矩阵旋转变换r以及平移变换t得到吊具坐标系坐标,
44.其转换关系如式1所述:
[0045][0046]
其中,x
spreader
,y
spreader
,z
spreader
为吊具坐标系坐标,x
lidar-i
,y
lidar-i
,z
lidar-i
为对应激光雷达点云坐标。
[0047]
s5,计算安全围栏坐标区:
[0048]
吊具3下放过程中,通过若干激光雷达32扫描吊具3下放的区域得到安全围栏区域,利用公式(1)将安全围栏区域由点云坐标系转换到吊具坐标系中,得到安全围栏坐标区。
[0049]
s6,计算障碍物坐标区:
[0050]
将激光雷达32扫描得到的障碍物点云坐标,利用公式(1)将障碍物点云坐标转换为在吊具坐标系中的障碍物坐标区。
[0051]
s7,安全围栏坐标区与障碍物坐标区的判断:
[0052]
若障碍物坐标区在安全围栏坐标区内或有重叠的部分,则吊具3继续下放会发生碰撞,若障碍物坐标区与安全围栏坐标区不重叠,则吊具3继续下放不会发生碰撞。
[0053]
s8,plc控制器控制:
[0054]
若吊具3继续下放不会发生碰撞,通过tcp通讯的方式发送信号到plc控制器,plc控制器控制吊具3继续下放完成下放作业。
[0055]
若吊具3继续下放会发生碰撞,通过tcp通讯的方式发送信号到plc控制器,plc控制器控制吊具3急停或沿水平方向移动进行避让后完成下放作业或等待人工干预后完成作业。
[0056]
以上所述仅为本发明的较佳实施方式而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
