技术特征:
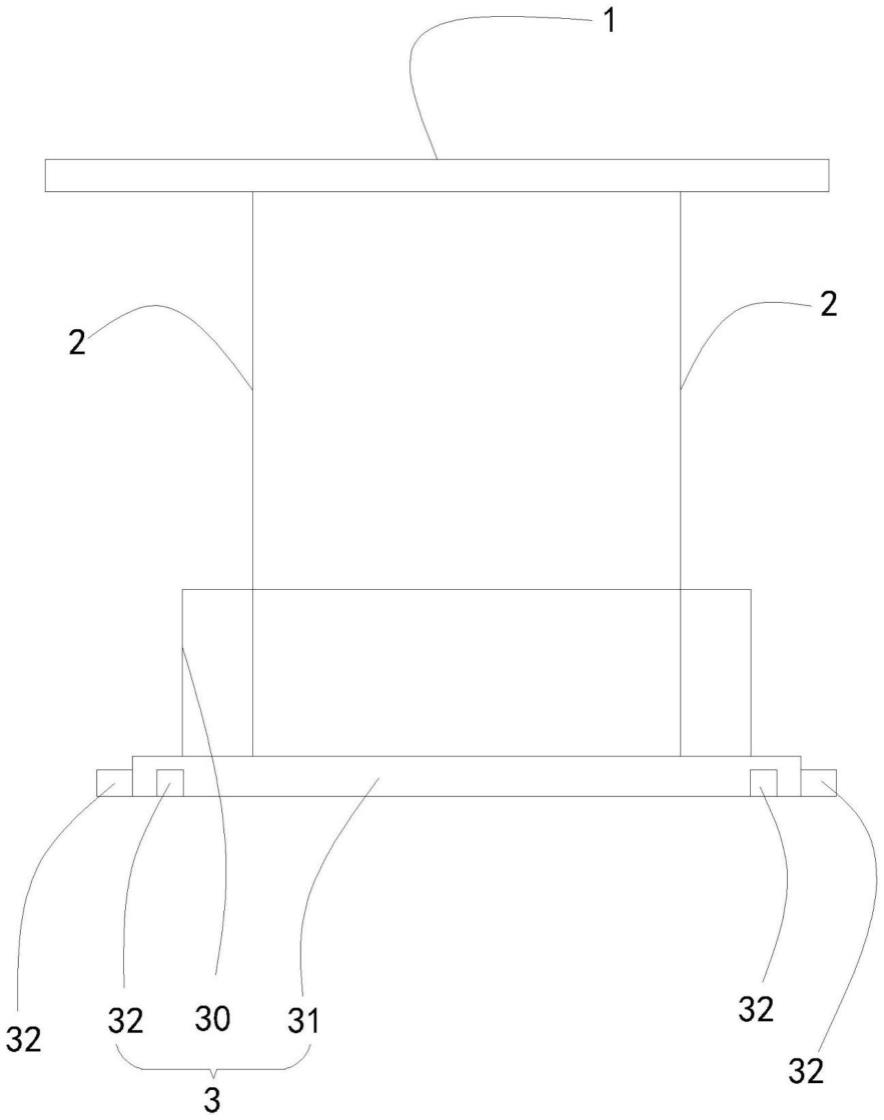
1.一种下放过程中进行防护的龙门吊吊具,其包括龙门吊主体(1)、钢丝绳(2)、吊具(3)和plc控制器,其中,钢丝绳(2)位于龙门吊主体(1)与吊具(3)之间,龙门吊主体(1)通过plc控制器控制收放钢丝绳(2),实现吊具(3)的升降,并且控制吊具(3)在水平方向移动;其特征在于:所述吊具(3)包括吊具上架(30)、吊具下架(31)和若干激光雷达(32),所述吊具下架(31)位于吊具上架(30)下方,吊具下架(31)每个侧面至少设置一个激光雷达(32),若干激光雷达(32)均朝向吊具(3)远离龙门吊主体(1)的一侧进行扫描。2.如权利要求1所述的一种下放过程进行防护的龙门吊吊具,其特征在于:所述吊具下架(31)为长方体,吊具下架(31)远离龙门吊主体(1)的一侧与水平面平行,钢丝(2)远离龙门吊主体(1)的一端固定设置在吊具上架(30)上。3.如权利要求2所述的一种下放过程进行防护的龙门吊吊具,其特征在于:所述吊具下架(31)包括两个长侧面(311)和两个短侧面(312),每个所述短侧面(312)上均设置一个激光雷达(32),每个所述长侧面(311)上均设置两个激光雷达(32)。4.如权利要求3所述的一种下放过程进行防护的龙门吊吊具,其特征在于:每个所述长侧面(311)上,其中一个激光雷达(32)设置在该长侧面(311)的一端,另一个激光雷达(32)设置在该长侧面(311)的另一端;每个所述短侧面(312)上的激光雷达(32)固定设置在短侧面(312)的中心位置,若干激光雷达(32)位于同一平面内。5.如权利要求4所述的一种下放过程进行防护的龙门吊吊具,其特征在于:若干所述激光雷达(32)为单线激光雷达或多线激光雷达或面阵激光雷达。6.一种下放过程进行防护的龙门吊吊具的防护方法,其特征在于,采用权利要求5所述的一种下放过程进行防护的龙门吊吊具,若干所述激光雷达(32)对吊具(3)下方进行扫描,障碍物形成点云坐标,通过算法分析障碍物点云坐标的位置信息与吊具(3)下放区域是否重叠,判断吊具(3)在下放区域内是否发生碰撞,通过tcp通讯的方式发送吊具(3)的移动信息到plc控制器,plc控制器驱动吊具(3)继续下放或急停或避让。7.如权利要求6所述的一种下放过程进行防护的龙门吊吊具的防护方法,其特征在于:选择吊具下架(31)中心为原点,平行于长侧面(311)为y轴所在方向,平行于短侧面(312)为x轴所在方向,垂直于吊具(3)为z轴所在方向,并且确定x、y、z轴的正方向,建立吊具坐标系。8.如权利要求7所述的一种下放过程进行防护的龙门吊吊具的防护方法,其特征在于:任意一个所述激光雷达(32)扫描采集到竖直平面(n
z
)与水平面(n
y
)的点云坐标,n
z
、n
y
分别为竖直平面与水平面的法向量,绕x、y、z轴旋转的欧拉角度为α、γ、β,通过n
y
与吊具坐标系y轴方向向量(0,1,0)求解γ、β的值,通过n
z
与吊具坐标系z轴方向矢量(0,0,1)求解α、β的值,计算出欧拉角α、γ、β的值以及对应的矩阵旋转变换r;测量每个所述激光雷达(32)与原点的位置,得到x/y/z三个方向上的平移分量,从而得出每个所述激光雷达(32)所对应的点云坐标平移变换t。9.如权利要求8所述的一种下放过程进行防护的龙门吊吊具的防护方法,其特征在于:每个所述激光雷达(32)扫描采集的点云坐标经过矩阵旋转变换r以及点云坐标平移变换t得到吊具坐标系坐标,其转换关系如式(1)所述:
其中,x
spreader
,y
spreader
,z
spreader
为吊具坐标系坐标,x
lidar-i
,y
lidar-i
,z
lidar-i
为对应点云坐标。10.如权利要求9所述的一种下放过程进行防护的龙门吊吊具的防护方法,其特征在于:将激光雷达(32)扫描得到的障碍物点云坐标转换为在吊具坐标系中的障碍物坐标区,所述吊具(3)下放区域为安全围栏区域,安全围栏区域在吊具坐标系中对应安全围栏坐标区,判断障碍物坐标区与安全围栏坐标区之间的关系,若障碍物坐标区在安全围栏坐标区内或有重叠的部分,则吊具(3)继续下放会发生碰撞,若障碍物坐标区在安全围栏坐标区不重叠,则吊具(3)继续下放不会发生碰撞。
技术总结
本发明提出了一种下放过程中进行防护的龙门吊吊具及其防护方法,属于港口自动化设备技术领域,钢丝绳位于龙门吊主体与吊具之间,龙门吊主体通过PLC控制器控制钢丝绳的收放,实现吊具的升降;PLC控制器根据下降防护算法给出的结果判断吊具是否下降及吊具的水平移动;若干激光雷达固定设置在吊具下架上,吊具下架每个侧面至少设置一个激光雷达,若干激光雷达中长边方向的激光雷达沿龙门吊大车运行方向进行扫描,短边方向的激光雷达沿着龙门吊小车运行方向进行扫描;其中,吊具下架的若干激光雷达不局限于单线、多线、面阵激光雷达。本发明通过吊具下架上安装的单线或多线或面阵激光雷达对吊具下方进行实时扫描获取点云数据,利用点云算法提前预判吊具下放过程中是否会发生碰撞,实现了吊具下放过程的全方位实时防护功能。防护功能。防护功能。
技术研发人员:何冲 李恒 石先城 张涛 曹志俊
受保护的技术使用者:武汉港迪智能技术有限公司
技术研发日:2022.08.16
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。