1.本发明属于弧垂检测辅助设备领域,具体是一种弧垂检测用无人机牵引绳施放回收装置。
背景技术:
2.弧垂观测是指在档距内紧线时利用视线或通过仪器测量判断导线弧垂的大小,使架空线的弧垂符合设计要求,而良好的弧垂观测和调整,能够满足耐阵需求,且能够协调导线各点与地面、水面等载体之间的关系,确保线路运行安全,因此电力行业需要定期对线路进行弧垂观测。
3.随着社会的进步,弧垂检测过程中使用设备也逐渐的智能化,弧垂检测需要检测的精度也在不断的提高,现有的弧垂检测过程中通常采用带有测距设备和摄像设备的仪器采集相关数据。
4.现有的弧垂检测采用带有测距设备和摄像设备的仪器采集相关数据时通常采用多点采集,其将弧垂检测设备与线路平行设置,在平行的路线上进行多点采集,或者在不用高度不同的位置进行采集。
5.但是,经研究发现上述采集时存在一定的弊端;
6.现有的弧垂检测采集过程中需要使得数据采集设备以一定的路径运动,因此,在使用时,通常采用牵引绳引导,使用牵引绳引导前采用人工将牵引绳的一端固定在铁塔角铁处,然后将数据采集设备安装在牵引绳上,数据采集设备上的驱动结构驱动该设备沿着牵引绳运动并采集数据;
7.在上述采集数据过程中需要人工登高悬挂牵引绳和收回牵引绳,使用时工作人员需要高空作业,存在一定的安全隐患,其次,人工登高悬挂牵引绳和收回牵引绳的工作量较大,而且耗时比较长,因此检测的时间比较长,从而使得检测的效率比较低下,不满足人们的使用要求。
技术实现要素:
8.为了克服现有技术的不足,本技术实施例提供使用时,工作人员采用遥控器远程连接无人机上的控制器,远程控制无人机的运行,启动无人机,遥控无人机带动吸附盒移动到铁塔角铁处,然后远程启动推动组件,推动组件带动吸附盒运动,从而使得吸附盒与铁塔角铁的外表面贴合,并且吸附在铁塔角铁上,实现牵引绳位置的固定,无需工作人员登高,能够减轻工作人员的工作量,提高线路弧垂检测的效率。
9.本技术实施例解决其技术问题所采用的技术方案是:
10.一种弧垂检测用无人机牵引绳施放回收装置,包括无人机、摄像组件、施放回收组件和遥控器(现有技术,图中未画出)。
11.无人机的下端面安装有无人机悬挂架;
12.摄像组件转动在无人机悬挂架上:
13.施放回收组件安装在无人机悬挂架的下端面;
14.遥控器通过无线通信模块与无人机连接;
15.其中,所述施放回收组件的内部设置有推动组件,所述推动组件上可拆卸式安装有吸附盒,所述吸附盒上设置有牵引绳,所述遥控器与推动组件和吸附盒无线连接。
16.摄像组件转动安装在无人机悬挂架上,可以采用云台结构安装,使得摄像组件能够转动,能够改变其角度,使得摄像组件能够朝各个方向进行拍摄,从而能够提高摄像组件的拍摄范围,从而提高采集效果。
17.无人机的下端面安装有支撑腿,其支撑腿的高度高于无人机悬挂架和施放回收组件的高度,使得无人机落地时施放回收组件不会与地面接触,从而能够有效的保护施放回收组件内部的电子器件。
18.使用时,工作人员采用遥控器远程连接无人机上的控制器,远程控制无人机的运行,启动无人机,遥控无人机带动吸附盒移动到铁塔角铁处,然后远程启动推动组件,推动组件带动吸附盒运动,从而使得吸附盒与铁塔角铁的外表面贴合,并且吸附在铁塔角铁上,实现牵引绳位置的固定,无需工作人员登高,能够减轻工作人员的工作量,提高线路弧垂检测的效率。
19.本发明一种弧垂检测用无人机牵引绳施放回收装置采用无人机代替工作人员,其能够带动吸附盒移动到高处,并实现吸附盒与铁塔角铁之间的的吸附,从而实现牵引绳的施放,从而使得弧垂检测过程中工作人员无需登高,能够减轻工作人员的工作量,提高线路弧垂检测的效率。
20.优选的,所述施放回收组件包括安装盒,所述安装盒的内部开设有通道,所述推动组件和吸附盒均设置在通道中。
21.推动组件和吸附盒均设置在通道中,推动组件能够带动吸附盒沿着通道运动,能够避免吸附盒施放时倾斜,从而使得吸附盒能够全面的与铁塔角铁接触,使得吸附盒吸附在铁塔角铁上。
22.优选的,所述推动组件包括弹簧和推板;
23.弹簧的一端固定安装在通道的侧壁上;
24.推板的一端面与弹簧的另一端固定连接;
25.其中,所述推板的内部设置有两组第一可控电磁铁,两组所述第一可控电磁铁分别与吸附盒的一端和通道的侧壁磁吸。
26.无人机运行时,两组第一可控电磁铁均处于启动状态,此时弹簧处于压缩状态,吸附盒吸附在推板上,无人机运行到铁塔角铁处,其中一组第一可控电磁铁关闭,弹簧恢复形变带动推板沿着通道运动,推板运动带动吸附盒运动,从而直接将吸附盒推出,使得吸附盒与铁塔角铁接触并吸附在铁塔角铁上,然后另一组第一可控电磁铁关闭,使得无人机上的推板与吸附盒分离,实现吸附盒位置的固定。
27.优选的,所述推板的两端面均固定安装有滑块,所述通道的内前壁和其内后壁上均开设有条形滑槽,所述滑块沿条形滑槽滑动。
28.滑块与条形滑槽配合的设置,条形滑槽能够起到引导和限定滑块运动的效果,从而使得推板的运动更加的平稳。
29.本发明一种弧垂检测用无人机牵引绳施放回收装置中记载了推动组件和通道,使
用时推动组件能够带动吸附盒沿着通道运动,从而能够限定住吸附盒的运动方向,避免吸附盒运动时出现倾斜或者翻转,从而使得吸附盒能够与铁塔角铁全面的接触,使得牵引绳施放更加的精准。
30.优选的,所述滑块的外表面设置有若干组滚珠,所述滚珠的外表面与条形滑槽的内表面贴合。
31.滚珠滚动设置,其能够将滑动摩擦力装换为滚动摩擦,从而能够减小摩擦力,使得滑块移动更加的顺畅,而且其能够起到支撑限位的效果,使得推板的运动效果更好。
32.优选的,所述推动组件还包括推杆,所述推杆位于弹簧的内部,所述推杆的主体部固定安装在通道的侧壁上,所述推杆的伸缩部与推板的外表面固定连接。
33.推杆和弹簧的数量均可以设置为若干组,推杆也可以设置在弹簧的侧端,设置在弹簧内部时能够避免弹簧形变过度而变形。
34.推杆起到限定的效果,其能够避免弹簧恢复形变时运动过度,而且起到牵引推板恢复到原本位置的效果。
35.推杆优选电动伸缩杆,能够控制电动伸缩杆伸缩,通过其伸缩实现推板位置的调节,从而使得该装置能够取消弹簧和其中一组第一可控电磁铁,但是该电动伸缩杆需要具备远程控制功能,或者将该电动伸缩杆与无人机的控制器连接,通过无人机控控制器控制电动伸缩杆的伸缩。
36.优选的,所述吸附盒包括盒体和磁铁板,所述磁铁板数量为两组,所述盒体位于两组磁铁板之间,所述磁铁板相向的一端面上设置有弹性组件,所述弹性组件与盒体连接。
37.使用时弹性组件起到缓冲的效果,能够减小磁吸过程中冲击力对盒体内部电子器件的影响。
38.优选的,远离所述推板位置的磁铁板上设置有第二可控电磁铁,远离所述第二可控电磁铁位置的磁铁板与推板内部的第一可控电磁铁磁吸。
39.第二可控电磁铁开启后磁铁板与铁塔角铁磁吸,实现磁铁板位置的固定。
40.优选的,所述弹性组件包括第一弹片、限位条和第二弹片;
41.第一弹片的数量为两组,第一弹片固定安装在磁铁板的外表面;
42.限位条设置在磁铁板的外表面;
43.第二弹片的数量为两组,两组所述第二弹片均设置在限位条上。
44.第一弹片和第二弹片相互配合,磁吸时第一弹片和第二弹片压缩,产生的形变将碰撞产生的能量消耗掉,从而减小碰撞力度,从而起到防护的效果。
45.优选的,所述盒体的外表面开设有凹槽,所述第二弹片远离限位条的一端与凹槽的内底面固定连接,所述第一弹片远离磁铁板的一端与盒体的外表面固定连接。
46.所述第一弹片的端面形状为u形,所述第二弹片的端面形状为z形,其均存在一定的形变空间,其形变过程能够将碰撞产生的能量消耗掉,从而减小碰撞力度,从而起到防护的效果。
47.限位条局部位于凹槽的内部,凹槽的设置能够有效避免第一弹片和第二弹片产生侧向形变。
48.本发明一种弧垂检测用无人机牵引绳施放回收装置中记载了弹性组件,使用时弹性组件起到缓冲的效果,其第一弹片和第二弹片产生形变,产生的形变将碰撞产生的能量
消耗掉,从而减小碰撞力度,从而能够减小磁吸过程中冲击力对盒体内部电子器件的影响,起到防护的效果。
49.综上所述,本发明包括以下至少一种有益技术效果:
50.一是,本发明一种弧垂检测用无人机牵引绳施放回收装置采用无人机代替工作人员,其能够带动吸附盒移动到高处,并实现吸附盒的吸附,从而实现牵引绳的施放,从而使得弧垂检测过程中工作人员无需登高,能够减轻工作人员的工作量,提高线路弧垂检测的效率。
51.二是,本发明一种弧垂检测用无人机牵引绳施放回收装置中记载了推动组件和通道,使用时推动组件能够带动吸附盒沿着通道运动,能够限定住吸附盒的运动方向,从而使得吸附盒能够与铁塔角铁全面的接触,使得牵引绳施放更加的精准。
52.三是,本发明一种弧垂检测用无人机牵引绳施放回收装置中记载了弹性组件,使用时弹性组件起到缓冲的效果,其第一弹片和第二弹片产生形变,产生的形变将碰撞产生的能量消耗掉,从而减小碰撞力度,从而能够减小磁吸过程中冲击力对盒体内部电子器件的影响,起到防护的效果,而且本发明一种弧垂检测用无人机牵引绳施放回收装置的结构比较简单,使用寿命长,使用效果好,实用性高。
附图说明
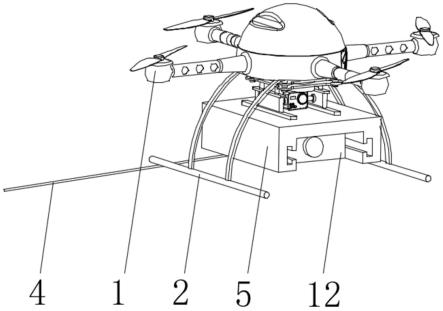
53.图1是本发明的整体结构示意图;
54.图2是本发明的局部结构图;
55.图3是本发明中吸附盒的局部结构图;
56.图4是本发明中吸附盒的其他角度结构图;
57.图5是本发明中推动组件的局部结构示意图;
58.图6是本发明中吸附盒的局部结构示意图;
59.图7是本发明中磁铁板的局部结构示意图。
60.附图标记:1、无人机;2、无人机悬挂架;3、吸附盒;4、牵引绳;5、安装盒;6、弹簧;7、推板;8、滑块;9、条形滑槽;10、滚珠;11、推杆;12、磁铁板;13、第二可控电磁铁;14、限位条;15、第一弹片;16、第二弹片。
具体实施方式
61.本技术实施例通过提供一种弧垂检测用无人机牵引绳施放回收装置,解决现有技术中弧垂检测采集数据过程中需要人工登高悬挂牵引绳和收回牵引绳,使用时工作人员需要高空作业,存在一定的安全隐患,其次,工作人员的工作量较大,而且检测的时间比较长,使得检测的效率比较低下,不满足人们的使用要求的问题,本发明弧垂检测用无人机牵引绳施放回收装置采用无人机代替工作人员,使用时工作人员采用遥控器远程连接无人机上的控制器,远程控制无人机的运行,启动无人机,遥控无人机带动吸附盒移动到铁塔角铁处,然后远程启动推动组件,推动组件带动吸附盒运动,从而使得吸附盒与铁塔角铁的外表面贴合,并且吸附在铁塔角铁上,实现牵引绳位置的固定,无需工作人员登高,从而实现牵引绳的施放,从而使得弧垂检测过程中工作人员无需登高,能够减轻工作人员的工作量,提高线路弧垂检测的效率,使用比较方便。
62.实施例1:
63.一种弧垂检测用无人机牵引绳施放回收装置,如图1-图7所示,包括无人机1、摄像组件、施放回收组件和遥控器(现有技术,图中未画出)。
64.无人机1的下端面安装有无人机悬挂架2;
65.摄像组件转动在无人机悬挂架2上:
66.施放回收组件安装在无人机悬挂架2的下端面;
67.遥控器通过无线通信模块与无人机1连接;
68.其中,施放回收组件的内部设置有推动组件,推动组件上可拆卸式安装有吸附盒3,吸附盒3上设置有牵引绳4,遥控器与推动组件和吸附盒3无线连接。
69.摄像组件转动安装在无人机悬挂架上,可以采用云台结构安装,使得摄像组件能够转动,能够改变其角度,使得摄像组件能够朝各个方向进行拍摄,从而能够提高摄像组件的拍摄范围,从而提高采集效果。
70.无人机的下端面安装有支撑腿,其支撑腿的高度高于无人机悬挂架和施放回收组件的高度,使得无人机落地时施放回收组件不会与地面接触,从而能够有效的保护施放回收组件内部的电子器件。
71.工作人员采用遥控器远程控制无人机1的运行,使得无人机1带动吸附盒3移动到铁塔角铁处,然后远程启动推动组件,推动组件带动吸附盒3运动使得吸附盒3与铁塔角铁贴合,并吸附在铁塔角铁上,实现牵引绳4位置的固定,无需工作人员登高,能够减轻工作人员的工作量,提高线路弧垂检测的效率。
72.本发明一种弧垂检测用无人机牵引绳施放回收装置采用无人机1代替工作人员,无人机1能够带动吸附盒3移动到高处,并实现吸附盒3的吸附,从而实现牵引绳4的施放,从而使得弧垂检测过程中工作人员无需登高,能够减轻工作人员的工作量,提高线路弧垂检测的效率。
73.实施例2:
74.在实施例1的基础上,如图1-图7所示,本实施例为施放回收组件以及相关装置的结构,
75.施放回收组件包括安装盒5,安装盒5的内部开设有通道,推动组件和吸附盒3均设置在通道中。
76.推动组件和吸附盒3均设置在通道中,推动组件带动吸附盒3沿着通道运动,能够避免吸附盒3施放时倾斜,从而使得吸附盒3能够全面的与铁塔角铁接触,使得吸附盒3吸附在铁塔角铁上。
77.推动组件包括弹簧6和推板7;
78.弹簧6的一端固定安装在通道的侧壁上;
79.推板7的一端面与弹簧6的另一端固定连接;
80.其中,推板7的内部设置有两组第一可控电磁铁,两组第一可控电磁铁分别与吸附盒3的一端和通道的侧壁磁吸。
81.无人机1运行时,两组第一可控电磁铁均处于启动状态,弹簧6处于压缩状态,吸附盒3吸附在推板7上,无人机1运行到铁塔角铁处,其中一组第一可控电磁铁关闭,弹簧6恢复形变带动推板7沿着通道运动,将吸附盒3推出,使得吸附盒3与铁塔角铁接触并吸附在铁塔
角铁上,然后另一组第一可控电磁铁关闭,使得无人机1上的推板7与吸附盒3分离,实现吸附盒3位置的固定。
82.推板7的两端面均固定安装有滑块8,通道的内前壁和其内后壁上均开设有条形滑槽9,滑块8沿条形滑槽9滑动。
83.滑块8与条形滑槽9配合的设置,能够限定住滑块8的运动方向,使得推板7的运动更加的平稳。
84.本发明一种弧垂检测用无人机牵引绳4施放回收装置中记载了推动组件和通道,使用时推动组件能够带动吸附盒3沿着通道运动,避免其倾斜,从而能够限定住吸附盒3的运动方向,从而使得吸附盒3能够与铁塔角铁全面的接触,使得牵引绳4施放更加的精准,避免吸附盒3掉落。
85.滑块8的外表面设置有若干组滚珠10,滚珠10的外表面与条形滑槽9的内表面贴合。
86.滚珠10滚动设置,能够减小摩擦力,而且其能够起到支撑限位的效果,使得推板7的运动效果更好。
87.推动组件还包括推杆11,推杆11位于弹簧6的内部,推杆11的主体部固定安装在通道的侧壁上,推杆11的伸缩部与推板7的外表面固定连接。
88.推杆11和弹簧6的数量均可以设置为若干组,推杆11也可以设置在弹簧6的侧端,设置在弹簧6内部时能够避免弹簧6形变过度而变形。
89.推杆11起到限定的效果,避免弹簧6恢复形变时运动过度,而且起到牵引推板7恢复到原本位置的效果。
90.推杆优选电动伸缩杆,能够控制电动伸缩杆伸缩,通过其伸缩实现推板位置的调节,从而使得该装置能够取消弹簧和其中一组第一可控电磁铁,但是该电动伸缩杆需要具备远程控制功能,或者将该电动伸缩杆与无人机的控制器连接,通过无人机控控制器控制电动伸缩杆的伸缩。
91.实施例3:
92.在实施例2的基础上,如图1-图7所示,本实施例为吸附盒3的结构;
93.吸附盒3包括盒体和磁铁板12,磁铁板12数量为两组,盒体位于两组磁铁板12之间,磁铁板12相向的一端面上设置有弹性组件,弹性组件与盒体连接。
94.使用时弹性组件起到缓冲的效果,能够减小磁吸过程中冲击力对盒体内部电子器件的影响。
95.远离推板7位置的磁铁板12上设置有第二可控电磁铁13,远离第二可控电磁铁13位置的磁铁板12与推板7内部的第一可控电磁铁磁吸。
96.第二可控电磁铁13开启后磁铁板12与铁塔角铁磁吸,实现磁铁板12位置的固定。
97.弹性组件包括第一弹片15、限位条14和第二弹片16;
98.第一弹片15的数量为两组,第一弹片15固定安装在磁铁板12的外表面;
99.限位条14设置在磁铁板12的外表面;
100.第二弹片16的数量为两组,两组第二弹片16均设置在限位条14上。
101.第一弹片15和第二弹片16相互配合,磁吸时第一弹片15和第二弹片16压缩,第一弹片15和第二弹片16产生的形变能够将碰撞产生的能量消耗掉,从而减小碰撞力度,从而
起到防护的效果。
102.盒体的外表面开设有凹槽,第二弹片16远离限位条14的一端与凹槽的内底面固定连接,第一弹片15远离磁铁板12的一端与盒体的外表面固定连接。
103.第一弹片15的端面形状为u形,第二弹片16的端面形状为z形,其均存在一定的形变空间。
104.限位条14局部位于凹槽的内部,凹槽的设置能够有效避免第一弹片15和第二弹片16产生侧向形变。
105.本发明一种弧垂检测用无人机牵引绳施放回收装置中记载了弹性组件,使用时弹性组件起到缓冲的效果,其第一弹片15和第二弹片16产生形变,产生的形变将碰撞产生的能量消耗掉,从而减小碰撞力度,从而能够减小磁吸过程中冲击力对盒体内部电子器件的影响,起到防护的效果。
106.需要说明的是,本发明一种弧垂检测用无人机牵引绳施放回收装置,使用时工作人员采用遥控器远程控制无人机1的运行,使得无人机1带动吸附盒3移动到铁塔角铁处,然后远程启动推动组件,推动组件带动吸附盒3运动使得吸附盒3与铁塔角铁贴合,并吸附在铁塔角铁上,实现牵引绳4位置的固定,无需工作人员登高,能够减轻工作人员的工作量,提高线路弧垂检测的效率;
107.无人机1运行时,两组第一可控电磁铁均处于启动状态,弹簧6处于压缩状态,吸附盒3吸附在推板7上,无人机1运行到铁塔角铁处,此时将其中一组第一可控电磁铁关闭,弹簧6恢复形变带动推板7沿着通道运动,推板7运动时将吸附盒3推出,使得吸附盒3与铁塔角铁接触;
108.吸附盒3与铁塔角铁接触时摄像组件启动拍摄照片,工作人员通过遥控器远程查看吸附盒3是否与铁塔角铁接触,接触时远程启动第二可控电磁铁13,使得吸附盒3吸附在铁塔角铁上,然后另一组第一可控电磁铁关闭,使得无人机1上的推板7与吸附盒3分离,实现吸附盒3位置的固定,然后拉紧牵引绳4即可完成牵引绳4的施放;
109.牵引绳4回收时,无人机1移动到铁塔角铁处,推板7与吸附盒3上的磁铁板12接触,摄像组件启动拍摄照片,工作人员通过遥控器远程查看推板7是否与磁铁板12接触,接触时启动其中一组第一可控电磁铁,使得推板7与吸附盒3吸附,吸附后关闭第二可控电磁铁13,同时推杆11启动,带动吸附盒3进入到通道内部,并且另一组第一可控电磁铁启动,实现推板7与吸附盒3位置的固定,无人机1飞回工作人员周边即可完成牵引绳4的回收。
110.最后应说明的是:显然,上述实施例仅仅是为清楚地说明本发明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明的保护范围之中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
