1.本发明属于电气自动化领域,具体涉及一种输电线路姿态实时监测方法及监测系统。
背景技术:
2.随着经济技术的发展和人们生活水平的提高,电能已经成为了人们生产和生活中必不可少的二次能源,给人们的生产和生活带来了无尽的便利。因此,保障电能的稳定可靠供应,就成为了电力系统最重要的任务之一。
3.输电线路是电力系统输送电能的关键部件。输电线路在长期运行中,线路因各种荷载作用而不可避免地出现输电线路姿态变化的现象,如:线路弧垂发生变化、微风振动、舞动、绝缘子偏斜等。这将导致相间、绝缘子串与杆塔间的安全距离不满足规程要求、杆塔或导线受力超过许用应力等,严重威胁输电网的安全稳定运行。因此,对输电线路的姿态进行全方位、实时准确的监测,就显得尤为重要。
4.但是,目前的输电线路姿态的实时监测方法,存在各类型的缺陷:采用视频图像的监测技术,其通过安装在杆塔的摄像机捕捉线路实时运动画面,利用视频图像处理技术获取监测特征点的三维坐标,实现线路运动姿态的实时监测,但是该类方法受天气、地势和地形的影响较大,当遇到大雾、雨雪等天气或者大高差、大档距的线路时,摄像头拍摄的图像并不清晰,从而导致导线姿态监测效果不佳;采用间隔安装在导线上的光纤传感器作为敏感元件,通过监测导线由于姿态变化所引起的光纤传感器内的光波波长偏移或者光波偏振态发生变化,从事实现对导线运动姿态的监测,但是该类方法中的光纤传感器的灵敏度受外界温度影响较大,严重影响测量精度,而且在恶劣的户外环境下运行稳定性较差。
5.因此,现有的线路姿态监测方法,可靠性并不高,而且精确性较差。
技术实现要素:
6.本发明的目的之一在于提供一种可靠性高、精确性好且适用范围广的输电线路姿态实时监测方法。
7.本发明的目的之二在于提供一种实现所述输电线路姿态实时监测方法的监测系统。
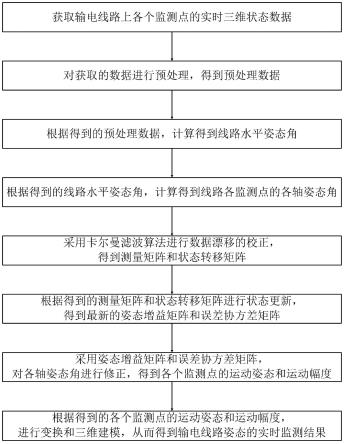
8.本发明提供的这种输电线路姿态实时监测方法,包括如下步骤:
9.s1.获取输电线路上各个监测点的实时三维状态数据;
10.s2.对步骤s1获取的数据进行预处理,得到预处理数据;
11.s3.根据步骤s2得到的预处理数据,计算得到线路水平姿态角;
12.s4.根据步骤s3得到的线路水平姿态角,计算得到线路各监测点的各轴姿态角;
13.s5.采用卡尔曼滤波算法进行数据漂移的校正,得到测量矩阵和状态转移矩阵;
14.s6.根据步骤s5得到的测量矩阵和状态转移矩阵进行状态更新,得到最新的姿态增益矩阵和误差协方差矩阵;
轴的加速度值;此时,三轴加速度计的输出为所述的水平姿态角包括俯仰角θ和翻滚角γ;
32.初步解算得到水平姿态角的结果为
33.步骤s4所述的根据步骤s3得到的线路水平姿态角,计算得到线路各监测点的各轴姿态角,具体包括如下步骤:
34.对于每一个监测点,均进行如下步骤:
35.将姿态转换矩阵利用四元数[q
0 q
1 q
2 q3]表示为:
[0036][0037]
式中q0~q3为四元数;
[0038]
利用三维加速度计确定初始水平姿态角γ0和θ0的值,同时设置初始航向角ψ0=0;根据四元数和欧拉角的转化关系,得到初始姿态四元数为
[0039]
利用四元数微分方程进行姿态更新:其中为姿态更新后的四元数,q 为规范四元数,w为角速度为参量的四元数,为四元数乘法符号;
[0040]
最后,得到监测点的各轴姿态角为
[0041]
步骤s5所述的采用卡尔曼滤波算法进行数据漂移的校正,得到测量矩阵和状态转移矩阵,具体包括如下步骤:
[0042]
对于每一个监测点,均进行如下步骤:
[0043]
三轴加速度计和三轴陀螺仪数据融合的状态方程和观测方程为:
[0044][0045]
式中g
k 1
为陀螺仪第k 1时刻的测量数据;gk为陀螺仪第k时刻的测量数据;φk为测量矩阵;mk为三轴陀螺仪测量时的误差;a
k 1
为加速度计第k 1时刻的测量数据;ak为加速度计第k时刻的测量数据;hk为状态转移矩阵;nk为三轴加速度计测量时的误差;
[0046]
由于ak=[00g]
t
,则ak与状态转移矩阵hk相乘得到
[0047]
三轴磁强计与三轴陀螺仪数据融合的状态方程和观测方程为:
[0048][0049]
式中m
k 1
为磁强计第k 1时刻的测量数据;mk为磁强计第k时刻的测量数据,且 mk=[h
x h
y hz]
t
,h
x
为三轴磁强计测量的在x轴的地磁分量,hy为三轴磁强计测量的在y轴的地磁分量,hz为三轴磁强计测量的在z轴的地磁分量;
[0050]
观测方程中mk与状态转移矩阵hk相乘得到:
[0051][0052]
采用扩展卡尔曼滤波算法进行优化:
[0053]
非线性系统的方程表示为其中 x(k 1)为k 1时刻的状态值,x(k)为k时刻的状态值,φ(k)为测量矩阵,f(k,x(k)) 为系统的第一非线性函数,l(k)为噪声驱动矩阵,m(k)为过程噪声,z(k)为k时刻的观测值,h(k)为状态转移矩阵,h(k,x(k))为系统的第二非线性函数,n(k)为k时刻的观测噪声;
[0054]
将系统的第一非线性函数f(k,x(k))、系统的第二非线性函数h(k,x(k)),采用泰勒级数展开得到近似的线性方程为
[0055][0056]
式中为数据的期望,为系统近似后的第一线性函数,为系统近似后的第二线性函数;
[0057]
根据得到的近似的线性方程,将测量矩阵φ(k)和状态转移矩阵h(k)采用含有f和h 函数的雅克比矩阵表示为和
[0058]
步骤s6所述的根据步骤s5得到的测量矩阵和状态转移矩阵进行状态更新,得到最新的姿态增益矩阵和误差协方差矩阵,具体包括如下步骤:
[0059]
对于每一个监测点,均进行如下步骤:
[0060]
k时刻运动信息提前预测状态量为其中为第 k时刻的运动信息预测量,为第k时刻的运动信息状态量;
[0061]
运动信息提前预测协方差为
[0062]
p(k 1∣k)=φ(k 1∣k)p(k∣k)φ
t
(k 1∣k) m(k 1)
[0063]
式中p(k 1∣k)为第k时刻的运动信息协方差预测量,p(k∣k)为第k时刻的运动信息协方差状态量,φ(k 1∣k)为第k时刻测量矩阵,m(k 1)为第k 1时刻的过程噪声;
[0064]
得到的姿态增益矩阵为
[0065][0066]
式中k(k 1)为k 1时刻的姿态增益矩阵,h(k 1)为k 1时刻的状态转移矩阵,n(k 1) 为k 1时刻的观测噪声;
[0067]
运动状态更新方程为:
[0068][0069]
式中为k 1时刻运动信息提前预测状态量,为k时刻运动信息提前预测状态量,z(k 1)为k 1时刻的观测值,为k时刻系统的第二非线性函数;
[0070]
状态值与观测值之间的误差协方差矩阵为:
[0071]
p(k 1)=[i-k(k 1)h(k 1)p(k 1∣k)]
[0072]
式中p(k 1)为k 1时刻的状态值与观测值之间的误差协方差矩阵,i为单位矩阵, p(k 1∣k)为第k时刻的运动信息协方差预测量。
[0073]
步骤s7所述的采用步骤s6得到的姿态增益矩阵和误差协方差矩阵,对步骤s4得到的各轴姿态角进行修正,得到各个监测点的运动姿态和运动幅度,具体为通过步骤s6得到的姿态增益矩阵和误差协方差矩阵,修正三轴陀螺仪测量得到的欧拉角值,以达到最优的姿态信息,得到各个监测点的运动姿态和幅度。
[0074]
步骤s8所述的根据步骤s7得到的各个监测点的运动姿态和运动幅度,进行变换和三维建模,从而得到输电线路姿态的实时监测结果,具体为通过对运动幅度进行短时傅里叶变换,得到监测点的运动频率;再将所有的分布式传感器监测的姿态、幅度信息、受力信息进行三维建模,得到输电线路的运动轨迹及受力状态,从而实现对导线姿态的实时监测。
[0075]
本发明还公开了一种实现所述输电线路姿态实时监测方法的监测系统,包括若干个姿态传感器模块、若干个导线拉力传感器模块、杆塔监测数据中转模块和数据中心;姿态传感器模块和导线拉力传感器模块均与杆塔监测数据中转模块连接,杆塔监测数据中转模块与数据中心连接;姿态传感器模块用于获取安装位置处的输电线路的姿态数据信息,并将信息通过局域网无线传输的方式上传杆塔监测数据中转模块;导线拉力传感器模块用于获取安装位置处的输电线路的导线拉力数据信息,并将信息通过局域网无线传输的方式上传杆塔监测数据中转模块;杆塔监测数据中转模块用于将获取的数据信息,通过广域网无线传输的方式上传数据中心;数据中心根据接收到的数据信息,采用上述的输电线路姿态
实时监测方法,完成输电线路姿态的实时监测。
[0076]
所述的姿态传感器模块包括姿态供电电路、三轴加速度计传感器、三轴陀螺仪传感器、三轴磁强计传感器、若干气压传感器、姿态控制器和姿态无线通信电路;三轴加速度计传感器、三轴陀螺仪传感器、三轴磁强计传感器和气压传感器均通过通信总线与姿态控制器连接;姿态控制器与姿态无线通信电路连接;姿态供电电路用于给所述姿态传感器模块供电;三轴加速度计传感器用于获取安装位置的导线的运动加速度数据,并通过总线将数据上传姿态控制器;三轴陀螺仪传感器用于获取安装位置的导线的运动角速度数据,并通过总线将数据上传姿态控制器;三轴磁强计传感器用于获取安装位置的导线的磁场数据,并通过总线将数据上传姿态控制器;气压传感器用于获取安装位置的导线的气压数据,并通过总线将数据上传姿态控制器;姿态控制器用于接收所有的传感器数据,并将数据通过总线上传姿态无线通信电路,姿态无线通信电路用于将接收到的数据上传杆塔监测数据中转模块。
[0077]
所述的三轴加速度计传感器和所述的三轴陀螺仪传感器为型号为mpu6050的陀螺仪加速器传感器;所述的三轴磁强计传感器为型号为hmc5883l的磁场传感器;所述的气压传感器为型号为ms5611的气压传感器;所述的姿态控制器为型号为stm32f103c8t6的控制芯片;所述的姿态无线通信电路为由型号为900hp的通信芯片构成的电路。
[0078]
所述的姿态供电电路包括ct取电电路、姿态5v供电电路和姿态3.3v供电电路;ct取电电路的输出端同时连接姿态5v供电电路和姿态3.3v供电电路;ct取电电路包括依次串接的取电ct、姿态整流电路和姿态变换电路;取电ct用于从输电导线上取电,姿态整流电路用于将取到的交流电转换为稳定的直流电,姿态变换电路用于将稳定的直流电转换为稳定的 12v电源;姿态5v供电电路用于将稳定的 12v电源转换为稳定的 5v电源,并给所述姿态传感器模块供电;3.3v供电电路用于将稳定的 12v电源转换为稳定的 3.3v电源,并给所述姿态传感器模块供电。
[0079]
所述的姿态5v供电电路为由型号为lp2591ac的供电芯片构成的电路;所述的姿态3.3v 供电电路为由型号为mic5205的供电芯片构成的电路。
[0080]
所述的导线拉力传感器模块包括拉力供电电路、拉力传感器、拉力控制器和拉力无线通信电路;拉力传感器、拉力控制器和拉力无线通信电路依次串联;拉力供电电路用于给所述导线拉力传感器模块供电;拉力传感器用于获取安装位置的导线的拉力数据信息,并上传拉力控制器;拉力控制器用于将接收到的数据上传拉力无线通信电路;拉力无线通信电路用于将接收到的数据上传杆塔监测数据中转模块。
[0081]
所述的拉力传感器为型号为tjl-12的拉力传感器;所述的拉力控制器为型号为 stm32f103c8t6的控制芯片;所述的拉力无线通信电路为由型号为900hp的通信芯片构成的电路。
[0082]
所述的拉力供电电路包括pt取电电路、拉力5v供电电路和拉力3.3v供电电路;pt取电电路的输出端同时连接拉力5v供电电路和拉力3.3v供电电路;pt取电电路包括依次串接的取电pt、拉力整流电路和拉力变换电路;取电pt用于从输电导线上取电,拉力整流电路用于将取到的交流电转换为稳定的直流电,拉力变换电路用于将稳定的直流电转换为稳定的 12v电源;拉力5v供电电路用于将稳定的 12v电源转换为稳定的 5v电源,并给所述导线拉力传感器模块供电;3.3v供电电路用于将稳定的 12v电源转换为稳定的 3.3v电源,并
给所述导线拉力传感器模块供电。
[0083]
所述的拉力5v供电电路为由型号为lp2591ac的供电芯片构成的电路;所述的拉力3.3v 供电电路为由型号为mic5205的供电芯片构成的电路。
[0084]
所述的杆塔监测数据中转模块包括太阳能供电模块、近距离无线通信电路、中转控制电路和远距离通信电路;近距离无线通信电路、中转控制电路和远距离无线通信电路依次串接;太阳能供电模块用于给所述杆塔监测数据中转模块供电;近距离无线通信电路用于与姿态传感器模块和导线拉力传感器模块连接,获取对应的传感器数据,并将数据上传中转控制电路;中转控制电路用于将接收到的数据上传远距离无线通信电路;远距离无线通信电路用于将获取的数据信息,通过广域网无线传输的方式上传数据中心。
[0085]
所述的中转控制电路为由型号为stm32f407系列的控制芯片构成的电路;所述的远距离通信电路为由型号为f2x16的4g数传终端构成的电路。
[0086]
本发明提供的这种输电线路姿态实时监测方法及监测系统,利用分布式多传感器实时感知及数据融合技术,对输电线路的运动状态、绝缘子串的状态及受力情况进行实时感知,通过局域网和广域网通信技术,将采集的多元数据发送至数据中心,再利用四元数和扩展卡尔曼滤波算法实现导线全范围、绝缘子串的三维空间运动轨迹实时解算,同时建立导线三维空间模型,不仅实现了输电线路姿态的实时监测,而且可靠性高,精确性好且适用范围广。
附图说明
[0087]
图1为本发明方法的方法流程示意图。
[0088]
图2为本发明方法中导航坐标系和监测点坐标系的旋转关系示意图。
[0089]
图3为本发明系统的功能模块图。
[0090]
图4为本发明系统的姿态5v供电电路和拉力5v供电电路的电路原理是示意图。
[0091]
图5为发明系统的姿态3.3v供电电路和拉力3.3v供电电路的电路原理是示意图。
[0092]
图6为本发明系统的陀螺仪加速器传感器的电路连接示意图。
[0093]
图7为本发明系统的三轴磁强计传感器的电路连接示意图。
[0094]
图8为本发明系统的气压传感器的电路连接示意图。
[0095]
图9为本发明系统的姿态控制器的电路连接示意图。
[0096]
图10为本发明系统的拉力传感器的电路连接示意图。
[0097]
图11为本发明系统的拉力控制器的电路连接示意图。
[0098]
图12为本发明系统的姿态无线通信电路和拉力无线通信电路的电路连接示意图。
[0099]
图13为本发明系统的杆塔监测数据发送模块的电路连接示意图。
具体实施方式
[0100]
如图1所示为本发明方法的方法流程示意图:本发明提供的这种输电线路姿态实时监测方法,包括如下步骤:
[0101]
s1.获取输电线路上各个监测点的实时三维状态数据;具体包括如下步骤:
[0102]
采用三轴陀螺仪,实时获取输电线路上各个监测点的运动角速度数据;
[0103]
采用三轴加速度计,实时获取输电线路上各个监测点的运动加速度数据;
[0104]
采用三轴磁强计,实时获取输电线路上各个监测点的运动磁场变化数据;
[0105]
采用气压传感器,获取气压高度信息;
[0106]
采用拉力传感器获取输电线路的拉力信息;
[0107]
s2.对步骤s1获取的数据进行预处理,得到预处理数据;具体包括如下步骤:
[0108]
针对每个监测点,采用去均值法对采集的n个数据进行常值偏差校正,得到校正后的数据x
′i为其中xi为校正前的原始数据,n为数据个数;
[0109]
s3.根据步骤s2得到的预处理数据,计算得到线路水平姿态角;具体包括如下步骤:
[0110]
对于每一个监测点,均进行如下步骤:
[0111]
建立导航坐标系x
n-y
n-zn和监测点坐标系x
b-y
b-zb,导航坐标系和监测点坐标系之间的关系(如图2所示)为:导航坐标系x
n-y
n-zn绕zn轴旋转航向角ψ,得到第一导航坐标系x
′
n-y
′
n-z
′n;然后第一导航坐标系x
′
n-y
′
n-z
′n绕y
′n轴旋转翻滚角γ,得到第二导航坐标系x
″
n-y
″
n-z
″n;然后,第二导航坐标系x
″
n-y
″
n-z
″n绕x
″n轴旋转俯仰角θ,得到监测点坐标系x
b-y
b-zb;
[0112]
得到姿态转换矩阵为
[0113][0114]
式中γ为翻滚角,ψ为航向角,θ为俯仰角;
[0115]
在x
n-y
n-zn坐标系下,初始静止状态时,三轴加速度计测得的重力加速度值ag在三轴上的表示为g为重力加速度值;当导线运行后,监测点位置产生水平姿态角,对应的加速度值a1表示为a
x
为x轴的加速度值,ay为y轴的加速度值,az为z 轴的加速度值;此时,三轴加速度计的输出为所述的水平姿态角包括俯仰角θ和翻滚角γ;
[0116]
初步解算得到水平姿态角的结果为
[0117]
s4.根据步骤s3得到的线路水平姿态角,计算得到线路各监测点的各轴姿态角;具体包括如下步骤:
[0118]
对于每一个监测点,均进行如下步骤:
[0119]
步骤s3无法计算得到航向角ψ的值,因此需要三轴陀螺仪辅助来完成测量;
[0120]
将姿态转换矩阵利用四元数[q
0 q
1 q
2 q3]表示为:
[0121][0122]
式中q0~q3为四元数;
[0123]
利用三维加速度计确定初始水平姿态角γ0和θ0的值,同时设置初始航向角ψ0=0;根据四元数和欧拉角的转化关系,得到初始姿态四元数为
[0124]
利用四元数微分方程进行姿态更新:其中为姿态更新后的四元数,q 为规范四元数,w为角速度为参量的四元数,为四元数乘法符号;
[0125]
最后,得到监测点的各轴姿态角为
[0126]
s5.采用卡尔曼滤波算法进行数据漂移的校正,得到测量矩阵和状态转移矩阵;具体包括如下步骤:
[0127]
对于每一个监测点,均进行如下步骤:
[0128]
为了减少长时间的积分运算存在的温漂情况,提高测量精度,引入卡尔曼滤波算法并利用加速度计和磁强计的输出数据校正陀螺仪的漂移;
[0129]
三轴加速度计和三轴陀螺仪数据融合的状态方程和观测方程为:
[0130][0131]
式中g
k 1
为陀螺仪第k 1时刻的测量数据;gk为陀螺仪第k时刻的测量数据;φk为测量矩阵;mk为三轴陀螺仪测量时的误差;a
k 1
为加速度计第k 1时刻的测量数据;ak为加速度计第k时刻的测量数据;hk为状态转移矩阵;nk为三轴加速度计测量时的误差;
[0132]
由于ak=[0 0 g]
t
,则ak与状态转移矩阵hk相乘得到
[0133]
三轴磁强计与三轴陀螺仪数据融合的状态方程和观测方程为:
[0134][0135]
式中m
k 1
为磁强计第k 1时刻的测量数据;mk为磁强计第k时刻的测量数据,且 mk=[h
x h
y hz]
t
,h
x
为三轴磁强计测量的在x轴的地磁分量,hy为三轴磁强计测量的在y轴的地磁分量,hz为三轴磁强计测量的在z轴的地磁分量;
[0136]
观测方程中mk与状态转移矩阵hk相乘得到:
[0137][0138]
由于上述四元数旋转矩阵的存在,加速度计、陀螺仪、磁强计之间的数据融合并不是线性条件,需要应用扩展卡尔曼滤波算法,对其进行优化;
[0139]
非线性系统的方程表示为其中 x(k 1)为k 1时刻的状态值,x(k)为k时刻的状态值,φ(k)为测量矩阵,f(k,x(k)) 为系统的第一非线性函数,l(k)为噪声驱动矩阵,m(k)为过程噪声,z(k)为k时刻的观测值,h(k)为状态转移矩阵,h(k,x(k))为系统的第二非线性函数,n(k)为k时刻的观测噪声;
[0140]
将系统的第一非线性函数f(k,x(k))、系统的第二非线性函数h(k,x(k)),采用泰勒级数展开得到近似的线性方程为
[0141][0142]
式中为数据的期望,为系统近似后的第一线性函数,为系统近似后的第二线性函数;
[0143]
根据得到的近似的线性方程,将测量矩阵φ(k)和状态转移矩阵h(k)采用含有f和h 函数的雅克比矩阵表示为和
[0144]
s6.根据步骤s5得到的测量矩阵和状态转移矩阵进行状态更新,得到最新的姿态增益矩阵和误差协方差矩阵;具体包括如下步骤:
[0145]
对于每一个监测点,均进行如下步骤:
[0146]
根据测量矩阵φ(k)和状态转移矩阵h(k)的表示,可以首先计算加速度计和磁强
计的雅克比矩阵,计算出数据融合所需要的参数,通过不断的状态更新,递推卡尔曼滤波方程,计算得到最新的姿态增益矩阵和误差协方差矩阵;
[0147]
k时刻运动信息提前预测状态量为其中为第 k时刻的运动信息预测量,为第k时刻的运动信息状态量;
[0148]
运动信息提前预测协方差为
[0149]
p(k 1∣k)=φ(k 1∣k)p(k∣k)φ
t
(k 1∣k) m(k 1)
[0150]
式中p(k 1∣k)为第k时刻的运动信息协方差预测量,p(k∣k)为第k时刻的运动信息协方差状态量,φ(k 1∣k)为第k时刻测量矩阵,m(k 1)为第k 1时刻的过程噪声;
[0151]
得到的姿态增益矩阵为
[0152][0153]
式中k(k 1)为k 1时刻的姿态增益矩阵,h(k 1)为k 1时刻的状态转移矩阵,n(k 1) 为k 1时刻的观测噪声;
[0154]
运动状态更新方程为:
[0155][0156]
式中为k 1时刻运动信息提前预测状态量,为k时刻运动信息提前预测状态量,z(k 1)为k 1时刻的观测值,为k时刻系统的第二非线性函数;
[0157]
状态值与观测值之间的误差协方差矩阵为:
[0158]
p(k 1)=[i-k(k 1)h(k 1)p(k 1∣k)]
[0159]
式中式中p(k 1)为k 1时刻的状态值与观测值之间的误差协方差矩阵,i为单位矩阵, p(k 1∣k)为第k时刻的运动信息协方差预测量;
[0160]
s7.采用步骤s6得到的姿态增益矩阵和误差协方差矩阵,对步骤s4得到的各轴姿态角进行修正,得到各个监测点的运动姿态和运动幅度;具体为通过步骤s6得到的姿态增益矩阵和误差协方差矩阵,修正三轴陀螺仪测量得到的欧拉角值,以达到最优的姿态信息,得到各个监测点的运动姿态和幅度;
[0161]
s8.根据步骤s7得到的各个监测点的运动姿态和运动幅度,进行变换和三维建模,从而得到输电线路姿态的实时监测结果;具体为通过对运动幅度进行短时傅里叶变换,得到监测点的运动频率;再将所有的分布式传感器监测的姿态、幅度信息、受力信息进行三维建模,得到输电线路的运动轨迹及受力状态,从而实现对导线姿态的实时监测。
[0162]
如图3所示为本发明系统的功能模块图:本发明公开的这种实现所述输电线路姿态实时监测方法的监测系统,包括若干个姿态传感器模块、若干个导线拉力传感器模块、杆塔监测数据中转模块和数据中心;姿态传感器模块和导线拉力传感器模块均与杆塔监测数据中转模块连接,杆塔监测数据中转模块与数据中心连接;姿态传感器模块用于获取输电线路的姿态数据信息,并将信息通过局域网无线传输的方式上传杆塔监测数据中转模块;导线拉力传感器模块用于获取输电线路的导线拉力数据信息,并将信息通过局域网无线传
输的方式上传杆塔监测数据中转模块;杆塔监测数据中转模块用于将获取的数据信息,通过广域网无线传输的方式上传数据中心;数据中心根据接收到的数据信息,采用上述的输电线路姿态实时监测方法,完成输电线路姿态的实时监测。
[0163]
具体实施时,若干个姿态传感器模块均分布式地安装在输电线路的导线上,而若干个导线拉力传感器模块则安装在输电线路的杆塔上;杆塔监测数据中转模块同样安装在输电线路的杆塔上。姿态传感器模块包括姿态供电电路、三轴加速度计传感器、三轴陀螺仪传感器、三轴磁强计传感器、气压传感器、姿态控制器和姿态无线通信电路;三轴加速度计传感器、三轴陀螺仪传感器、三轴磁强计传感器和气压传感器均通过通信总线与姿态控制器连接;姿态控制器与姿态无线通信电路连接;姿态供电电路用于给所述姿态传感器模块供电;三轴加速度计传感器用于获取安装位置的导线的运动加速度数据,并通过总线将数据上传姿态控制器;三轴陀螺仪传感器用于获取安装位置的导线的运动角速度数据,并通过总线将数据上传姿态控制器;三轴磁强计传感器用于获取安装位置的导线的磁场数据,并通过总线将数据上传姿态控制器;气压传感器用于获取安装位置的导线的气压数据,并通过总线将数据上传姿态控制器;姿态控制器用于接收所有的传感器数据,并将数据通过总线上传姿态无线通信电路,姿态无线通信电路用于将接收到的数据上传杆塔监测数据中转模块。
[0164]
姿态供电电路包括ct取电电路、姿态5v供电电路和姿态3.3v供电电路;ct取电电路的输出端同时连接姿态5v供电电路和姿态3.3v供电电路;ct取电电路包括依次串接的取电ct、姿态整流电路和姿态变换电路;取电ct用于从输电导线上取电,姿态整流电路用于将取到的交流电转换为稳定的直流电,姿态变换电路用于将稳定的直流电转换为稳定的 12v 电源;姿态5v供电电路用于将稳定的 12v电源转换为稳定的 5v电源,并给所述姿态传感器模块供电;3.3v供电电路用于将稳定的 12v电源转换为稳定的 3.3v电源,并给所述姿态传感器模块供电。
[0165]
导线拉力传感器模块包括拉力供电电路、拉力传感器、拉力控制器和拉力无线通信电路;拉力传感器、拉力控制器和拉力无线通信电路依次串联;拉力供电电路用于给所述导线拉力传感器模块供电;拉力传感器用于获取安装位置的导线拉力数据信息,并上传拉力控制器;拉力控制器用于将接收到的数据上传拉力无线通信电路;拉力无线通信电路用于将接收到的数据上传杆塔监测数据中转模块。
[0166]
拉力供电电路包括pt取电电路、拉力5v供电电路和拉力3.3v供电电路;pt取电电路的输出端同时连接拉力5v供电电路和拉力3.3v供电电路;pt取电电路包括依次串接的取电 pt、拉力整流电路和拉力变换电路;取电pt用于从输电导线上取电,拉力整流电路用于将取到的交流电转换为稳定的直流电,拉力变换电路用于将稳定的直流电转换为稳定的 12v电源;拉力5v供电电路用于将稳定的 12v电源转换为稳定的 5v电源,并给所述导线拉力传感器模块供电;3.3v供电电路用于将稳定的 12v电源转换为稳定的 3.3v电源,并给所述导线拉力传感器模块供电。
[0167]
杆塔监测数据中转模块包括太阳能供电模块、近距离无线通信电路、中转控制电路和远距离通信电路;近距离无线通信电路、中转控制电路和远距离无线通信电路依次串接;太阳能供电模块用于给所述杆塔监测数据中转模块供电;近距离无线通信电路用于与姿态传感器模块和导线拉力传感器模块连接,获取对应的传感器数据,并将数据上传中转
控制电路;中转控制电路用于将接收到的数据上传远距离无线通信电路;远距离无线通信电路用于将获取的数据信息,通过广域网无线传输的方式上传数据中心。
[0168]
如图4所示为本发明系统的姿态5v供电电路和拉力5v供电电路的电路原理是示意图:姿态5v供电电路和拉力5v供电电路的电路原理图相同,均采用型号为lp2591ac的供电芯片构成的电路;所以此处以同一副图进行说明:
[0169]
芯片u6的型号为lp2591ac;芯片的1脚为输出引脚,直接输出稳定的 5v电源信号 vcc5.0v,并对外供电;同时,芯片的1脚还通过电容c21~c23接地并滤波;芯片的2脚直接与1脚短接,并确保引脚电平为高电平;芯片的4脚为接地引脚,直接接地;芯片的5脚则直接接地,确保引脚电平为低电平;芯片的6脚和7脚均通过电容c24连接芯片的1脚;芯片的8脚为电源输入引脚,其直接连接 12v电源信号,并取电;同时, 12v电源信号也通过电容c25接地并滤波。
[0170]
如图5所示为发明系统的姿态3.3v供电电路和拉力3.3v供电电路的电路原理是示意图:姿态3.3v供电电路和拉力3.3v供电电路的电路原理图相同,均采用型号为mic5205的供电芯片构成的电路;所以此处以同一副图进行说明:
[0171]
芯片u4的型号为mic5205;芯片的1脚为电源输入引脚,直接连接 12v电源信号并取电;同时,芯片的1脚也通过电容c11接地并滤波;芯片的2脚为使能引脚,直接连接 12v 电源信号,从而保证电源引脚的电平为高电平,进而保证芯片的正常工作;芯片的4脚直接通过电容c20接地;芯片的5脚为输出引脚,直接输出稳定的 3.3v电源信号vcc3.3v,并对外供电。
[0172]
如图6所示为本发明系统的陀螺仪加速器传感器的电路连接示意图:三轴加速度计传感器和所述的三轴陀螺仪传感器为型号为mpu6050的陀螺仪加速器传感器;芯片u3的型号为 mpu6050;芯片的1脚为接地引脚,直接接地;芯片的8脚和9脚均直接连接3.3v电源信号 vcc3.3v,并保证引脚电平为高电平;芯片的10脚通过电容接地,芯片的11脚则直接接地;芯片的13脚为电源引脚,直接连接3.3v电源信号vcc3.3v,并取电;芯片的18脚直接接地;芯片的23脚和24脚为通信引脚,该两脚输出通信信号sda和scl,同时该两脚也为传感数据的输出引脚;传感器将检测到的传感数据通过引脚23和24发送到总线上,从而上传到姿态控制器。
[0173]
如图7所示为本发明系统的三轴磁强计传感器的电路连接示意图:三轴磁强计传感器为型号为hmc5883l的磁场传感器;芯片u2的型号为hmc5883l;芯片的2脚为电源引脚,直接连接3.3v电源信号vcc3.3v,并取电;同时,芯片的2脚也通过电容c5接地并滤波;芯片的4脚通过电容c5接地;芯片的8脚和12脚之间连接电容c6;芯片的9脚和11脚为接地引脚,并直接接地;芯片的10脚为外接电容引脚,直接通过电容c3接地;芯片的13 脚连接3.3v电源信号vcc3.3v,并取电;芯片的16脚和1脚为通信引脚,该两脚输出通信信号sda和scl,同时该两脚也为传感数据的输出引脚;传感器将检测到的传感数据通过引脚16和1发送到总线上,从而上传到姿态控制器。
[0174]
如图8所示为本发明系统的气压传感器的电路连接示意图:气压传感器为型号为ms5611 的气压传感器;芯片u5的型号为ms5611;芯片的4脚、1脚和2脚均直接连接电源信号 vcc3.3v,并取电;同时,芯片的1脚也通过电容c18和c19接地滤波;芯片的3脚为接地引脚,并直接接地;芯片的7脚和8脚为通信引脚,该两脚输出通信信号sda和scl,同时该两脚也为
传感数据的输出引脚;传感器将检测到的传感数据通过引脚7和8发送到总线上,从而上传到姿态控制器。
[0175]
如图9所示为本发明系统的姿态控制器的电路连接示意图:姿态控制器为型号为 stm32f103c8t6的控制芯片;芯片u1的型号为stm32f103c8t6;芯片的5脚和6脚为晶振引脚,该2脚连接外部的第二晶振电路并获取晶振信号;芯片的3脚和4脚也为晶振引脚,该2脚连接外部的第一晶振电路并获取晶振信号;第一晶振电路包括晶振y1、电容c7、电容c8;晶振y1的两端分别通过电容c7或c8接地,同时,晶振的两端也连接芯片的3脚和4脚,并对控制芯片输出晶振信号;第二晶振电路包括晶振y2、电容c9、电容c10;晶振 y2的两端分别通过电容c9或c10接地,同时,晶振的两端也连接芯片的5脚和6脚,并对控制芯片输出晶振信号;芯片的21脚和22脚为通信引脚,并分别连接通信引脚scl和sda,同时芯片也通过该两引脚通过通信的方式获取对应的传感器上传的传感数据;芯片的23脚、 35脚、和47脚为接地引脚,并直接接地;芯片的24脚、36脚、48脚均为电源引脚,并直接连接电源信号vcc3.3v,并取电;芯片的7脚为复位引脚,其连接外部的复位电路并获取复位信号reset;复位电路包括电阻r1、电容c1和复位按钮sw1;电阻r1和电容c1串接后,连接在3.3v电源和地之间;正常工作时,复位信号reset通过上拉电阻r1连接3.3v 电源,复位信号reset为高电平,此时控制芯片正常工作;当异常时,按下按钮开关sw1,此时复位信号reset直接接地,复位信号为低电平,此时控制芯片复位。
[0176]
如图10所示为本发明系统的拉力传感器的电路连接示意图:拉力传感器为型号为tjl-12 的拉力传感器;同时,拉力传感器输出的信号为in 和in-,并通过电阻r5和r6输入到芯片u7的11脚和12脚;芯片u7的型号为ads1232,用于对拉力传感器上传的数据进行采样,并将采样数据通过芯片txs0104epwr上传拉力控制器;芯片txs0104epwr为电平转换芯片,由于采样芯片ads1232的电压水平为 5v,而拉力控制器的电压水平为 3.3v,两者之间无法直接进行数据传输,因此采用电平转换芯片txs0104epwr对电平进行转换。
[0177]
芯片u7的1脚直接连接电源信号vc5.0v,并取电。芯片的2脚、3脚、5脚、6脚、7 脚、8脚、17脚和20脚均直接接地;芯片的9脚和10脚之间外接电容c31,从而保证芯片正常工作;芯片的11脚和12脚连接拉力传感器的输出信号引脚并获取对应的拉力传感数据;芯片的15脚通过电阻r8接地,保证引脚电平为低电平;芯片的18脚和19脚则直接连接电源信号号vc5.0v,并取电;芯片的21脚~24脚为信号输出引脚,其中24脚输出数据信号, 21脚~23脚则输出控制信号;芯片u7的21脚~24脚依次分别连接到芯片txs0104epwr的 10脚~13脚。
[0178]
芯片txs0104epwr的1脚为电源信号,直接连接电源信号vcc3.3v,并取电;芯片 txs0104epwr的14脚为电源信号,直接连接线元信号vcc5.0v,并取电;芯片的7脚为接地引脚,直接接地;芯片的10脚~13脚连接芯片u7,并获取对应的待转换的信号;芯片的5脚~2脚为输出引脚,将获取的待转换的信号(该信号为 5v信号)转换为3.3v电压水平的信号sp、pd、sc和do,并输出到拉力控制器。
[0179]
如图11所示为本发明系统的拉力控制器的电路连接示意图:拉力控制器为型号为 stm32f103c8t6的控制芯片;拉力控制器为型号为stm32f103c8t6的控制芯片;芯片u11 的型号为stm32f103c8t6;芯片的5脚和6脚为晶振引脚,该2脚连接外部的第二晶振电路并获取晶振信号;芯片的3脚和4脚也为晶振引脚,该2脚连接外部的第一晶振电路并获取晶振信号;第一晶振电路包括晶振y11、电容c71、电容c81;晶振y11的两端分别通过电容c71或c81
接地,同时,晶振的两端也连接芯片的3脚和4脚,并对控制芯片输出晶振信号;第二晶振电路包括晶振y21、电容c91、电容c101;晶振y21的两端分别通过电容c91 或c101接地,同时,晶振的两端也连接芯片的5脚和6脚,并对控制芯片输出晶振信号;芯片的23脚、35脚、和47脚为接地引脚,并直接接地;芯片的24脚、36脚、48脚均为电源引脚,并直接连接电源信号vcc3.3v,并取电;芯片的11脚~14脚为信号输入引脚,依次连接sp信号、pd信号、sc信号和do信号,并从电平转换芯片txs0104epwr处获取对应的转换电平后的拉力传感器上传的传感信号;芯片的7脚为复位引脚,其连接外部的复位电路并获取复位信号reset;复位电路包括电阻r11、电容c11和复位按钮sw11;电阻 r11和电容c11串接后,连接在3.3v电源和地之间;正常工作时,复位信号reset通过上拉电阻r11连接3.3v电源,复位信号reset为高电平,此时控制芯片正常工作;当异常时,按下按钮开关sw11,此时复位信号reset直接接地,复位信号为低电平,此时控制芯片复位。
[0180]
如图12所示为本发明系统的姿态无线通信电路和拉力无线通信电路的电路连接示意图:姿态无线通信电路为由型号为900hp的通信芯片构成的电路;拉力无线通信电路为由型号为900hp的通信芯片构成的电路;姿态无线通信电路和拉力无线通信电路为相同的电路,因此采用同一幅图进行说明:
[0181]
控制芯片stm32f103c8t6(拉力控制器和姿态控制器是一样的)的21脚(引脚标号pb10) 22脚(引脚标号pb11)为通信引脚,其直接输出总线信号rxd和txd,并连接到隔离芯片 adum1201的2脚和3脚,同时隔离芯片adum1201的1脚连接3.3v电源信号,隔离芯片 adum1201的4脚接地;隔离芯片的8脚输出电源信号并为通信芯片900hp供电;隔离芯片的5脚也直接接地;隔离芯片的7脚和6脚为隔离后的通信引脚,并连接到通信芯片900hp的通信引脚;控制芯片stm32f103c8t6的总线信号通过隔离芯片 adum1201进行隔离后,连接到通信芯片900hp的引脚,从而实现了控制芯片和通信芯片之间的数据传输。
[0182]
如图13所示为本发明系统的杆塔监测数据发送模块的电路连接示意图:中转控制电路为由型号为stm32f407系列的控制芯片构成的电路;远距离通信电路为由型号为f2x16的4g 数传终端构成的电路;通信芯片900hp的电源引脚连接隔离芯片adum1201的1 脚,并同时连接3.3v电源信号并取电通信芯片的通信引脚rxd和txd连接隔离芯片的2 脚和3脚,并进行数据交互;通信芯片的接地引脚gnd连接隔离芯片的接地引脚4脚,从而使得通信芯片和隔离芯片的输入端共地;隔离芯片的输出端8脚输出端的电源引脚,连接控制芯片(型号为stm32f407vet6)的电源引脚,并同时连接3.3v供电电源并取电;隔离芯片的输出端7脚和6脚为通信引脚,直接连接控制芯片的通信引脚rxd和txd(对应引脚为pa10和pa9),并进行数据交互;隔离芯片的输出端接地引脚为5脚,与控制芯片的接地引脚连接,从而保证隔离芯片的输出端与控制芯片共地;控制芯片的另一组通信引脚(引脚为pd5和pd6)则与型号为f2x16的4g数传终端的通信引脚连接,并进行数据交互;同样的,控制芯片的接地引脚与4g数传终端的接地引脚连接,保证控制芯片与4g数传终端共地;
[0183]
姿态无线通信电路和拉力无线通信电路通过通信芯片900hp上传的数据,再由同型号的通信芯片(图11中的射频模块)进行接收;接收到数据后,通信芯片将数据通过通信线上传到隔离芯片的2脚和3脚;隔离芯片进行数据隔离后,再通过输出端的7脚和8 脚将数据通过通信线上传到中转控制电路的控制芯片的pa10脚和pa9脚;然后控制芯片
再通过第二通信引脚pd6和pd5将数据通过第二通信引脚上传到4g数传终端;最终,4g数传终端将数据通过天线对外发送到数据中心。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。