1.本发明涉及医疗器械辅助技术领域,具体涉及一种自动采血机器人的手肘托及调节方法。
背景技术:
2.现有的手肘托仅仅解决如何更好的固定手臂或者调节,但无法对血管进行准确的压脉,这会导致一些自动采血机无法对患者的血管位置进行准确的定位,导致一些血管不明显的患者还需要二次采集,费时费力。
3.为了与自动采血机器人相适配,患者在使用前还需要提前使用医用皮筋进行压脉处理,但在此过程中,患者无法准确判断血管的正确状态,仍然会导致机器的使用困难。
技术实现要素:
4.本发明的目的在于提供一种自动采血机器人的手肘托及调节方法,以解决现有技术中手肘托无自动压脉过程以及对血管定位难的技术问题。
5.为解决上述技术问题,本发明具体提供下述技术方案:
6.本发明提供了一种自动采血机器人的手肘托,包括:
7.卡托机构,通过驱动装置滑动设置在工作台上,且所述卡托机构用于对手臂及手肘进行承托,所述卡托机构的端部设置有血管的采血位点:
8.充气压脉机构,固定安装在工作台上,且设置在所述卡托机构上方,所述充气压脉机构连接有充气装置并在充气状态下对手臂进行压脉;
9.控制组件,与所述充气压脉机构以及所述驱动装置通讯连接,所述控制组件用于控制所述充气压脉机构内的气压以及所述驱动装置的动作状态;
10.其中,当所述充气压脉机构内的气压达到额定气压时,所述充气压脉机构形成对手臂的微压固定,此时所述卡托机构带动手臂移动,所述充气压脉机构在拉伸过程中形成对手臂的压脉处理。
11.作为本发明的一种优选方案,所述卡托机构上设置有视觉感应器,在压脉处理过程中,所述手臂血管向形成轻微隆起,所述视觉感应器对隆起位置发射定位激光b,所述定位激光b映射在所述手臂血管上的光斑即为所述采血位点。
12.作为本发明的一种优选方案,所述卡托机构上设置有采血机,所述采血机向所述卡托机构发射定位激光a,所述定位激光a在所述卡托机构上形成光点;
13.在压脉处理过程中,所述驱动装置带动所述卡托机构移动并对手臂进行拉伸,所述充气压脉机构在拉伸过程中实现对手臂血管的收紧与放松,当所述光点与所述采血位点重合时,所述采血机沿着所述定位激光a向所述采血位点进行采血。
14.作为本发明的一种优选方案,所述卡托机构包括安装在所述驱动装置上的底板,所述底板上设置有承托手臂的弧形槽托,所述弧形槽托的一端设置有所述采血位点,所述弧形槽托的另一端设置有托板,所述托板倾斜设置在所述弧形槽托上并用于对手肘进行固
定;
15.所述充气压脉机构的压脉位置设置在所述采血位点与所述托板之间,所述底板在移动过程中通过托板带动手臂向所述采血位点移动,所述充气压脉机构的压脉位置固定。
16.作为本发明的一种优选方案,所述弧形槽托上通过滑块滑动安装有手把,所述手把设置在靠近所述采血位点的一端,所述采血位点位于所述手把与所述充气压脉机构之间。
17.作为本发明的一种优选方案,所述驱动装置能够带动所述底板前后移动,形成压脉状态,且在所述压脉状态中,所述驱动装置能够带动所述底板以所述托板为圆心往复摆动。
18.作为本发明的一种优选方案,所述充气压脉机构包括分别固定设置在所述底板两侧的支撑杆,所述支撑杆之间设置有环形气囊,所述环形气囊安装在所述弧形槽托上且设置在所述采血位点与所述托板之间;
19.所述环形气囊通过管道与所述充气装置连接,所述环形气囊内部设置有气压感应器,所述管道内设置有感应气阀,所述感应气阀以及所述气压感应器均与所述控制组件连接,当所述气压感应器内的气压达到阀定值时向所述控制组件发射信号,所述控制组件向所述感应气阀发射关闭信号。
20.作为本发明的一种优选方案,所述环形气囊的两端转动设置在所述支撑杆上。
21.本发明提供了一种自动采血机器人的手肘托的调节方法,包括如下步骤:
22.将手臂固定在手肘托上;
23.使用单线激光向下照射,形成采血光点;
24.对手臂的压脉位点进行微压固定,手臂上的血管形成轻微凸起;
25.使用多线激光对所述轻微凸起进行定位,形成光斑;
26.移动手肘托,使得光斑与采血光点重合,以完成调节。
27.作为本发明的一种优选方案,在所述手肘托移动过程中,所述压脉位点固定不变,以进行松紧式的压脉处理。
28.本发明与现有技术相比较具有如下有益效果:
29.1、本发明在自动采血过程中对手臂进行压脉处理,使得患者手臂上的血管凸出,便于对手臂的定位与采血;
30.2、本发明使用的手臂位置调节系统与压脉过程相互作用,在适应性调整手臂位置的过程中加强对手臂的压力,使得手臂的血管更加突出,从而进一步便利血管的识别与穿刺系统;
31.3、本发明在血管位置调节与压脉过程中全程自动,不需要患者配合即可使用。
附图说明
32.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
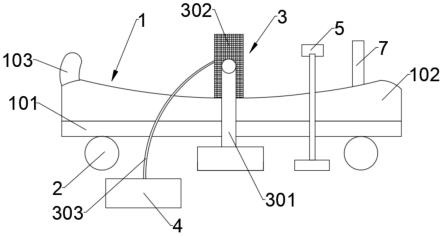
33.图1为本发明提供自动采血机器人的手肘托的结构示意图;
34.图2为本发明提供卡托机构的侧面局部结构示意图;
35.图3为本发明提供充气压脉机构的结构示意图。
36.图中的标号分别表示如下:
37.1-卡托机构;2-驱动装置;3-充气压脉机构;4-充气装置;5-视觉感应器; 6-滑块;7-手把;
38.101-底板;102-弧形槽托;103-托板;
39.301-支撑杆;302-环形气囊;303-管道;304-感应气阀。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.如图1所示,本发明提供了一种自动采血机器人的手肘托,包括卡托机构1,通过驱动装置2滑动设置在工作台上,且所述卡托机构1用于对手臂及手肘进行承托,所述卡托机构1的端部设置有血管的采血位点。
42.充气压脉机构3,固定安装在工作台上,且设置在所述卡托机构1上方,所述充气压脉机构3连接有充气装置4并在充气状态下对手臂进行压脉。
43.控制组件,与所述充气压脉机构3以及所述驱动装置2通讯连接,所述控制组件用于控制所述充气压脉机构3内的气压以及所述驱动装置2的动作状态。
44.其中,当所述充气压脉机构3内的气压达到额定气压时,所述充气压脉机构3形成对手臂的微压固定,此时所述卡托机构1带动手臂移动,所述充气压脉机构3在拉伸过程中形成对手臂的压脉处理。
45.具体的,本发明仅公开了手肘托结构,在实际使用时,此手肘托的调节还需要与采血机联合使用。
46.采血位点是指血管上的采血位置,每个患者的采血位点可能不同,需要通过卡托机构1的移动来将采血位点与采血机位置相对应。
47.此装置的具体使用方式如下:
48.1、患者手臂穿过充气压脉机构3,并放置在卡托机构1上,此时手肘的位置被卡托机构1限位;
49.2、通过充气装置4向充气压脉机构3充气,使得充气压脉机构3对患者的手臂进行微压固定,即具有一定的压力,但未处在压迫的状态,此时充气压脉机构3具有定位效果;
50.3、通过驱动装置2带动卡托机构1移动,将采血位点与采血机相对应,此时由于充气压脉机构3固定不动,故在拉伸状态下,充气压脉机构3形成对手臂的松紧压脉,采血位点处的血管凸出,便于采血与定位;
51.4、定位完成后,采血机对采血位点处的手臂血管进行采血,采血完毕后驱动装置2回到初始位置,充气压脉机构3放气并解除对手臂的定位,患者可将手臂抽出。
52.在本发明中,通过手臂的移动,来使得完成压脉的过程,且在压脉的过程中,手臂上的采血位点更加突出,有利于手臂位置的调整,二者相互配合,便于加快采血的速率。
53.进一步地,对采血位点进行定位的方法与装置很多,但在本实施例中,为了提高定位速率,所述卡托机构1上设置有视觉感应器5,在压脉处理过程中,所述手臂血管向形成轻微隆起,所述视觉感应器5对隆起位置发射定位激光b,所述定位激光b映射在所述手臂血管上的光斑即为所述采血位点。
54.若患者本身的血管非常突出,则卡托机构1不需要进行多次移动,视觉感应器5即可对能够采血的静脉血管进行定位,将血管标记为采血位点,采血机对采血位点进行定位,直接进行采血,便于加快采血的效率,且患者的感受更加舒适。
55.当患者本身的血管不凸出时,卡托机构1需要多次前后左右移动,来使得患者的手臂在充气压脉机构3内受到压迫,多次压迫后,直到患者的静脉微微隆起,此时视觉感应器5对隆起的血管进行定位。此种方法有利于提高对血管不明显患者的采血精度,提高使用的范围,防止由于采集失败导致的二次采集。
56.进一步地,自动采血机的种类很多,其定位血管的方式也很多,但在本实施例中,为了使得定位更加准确,所述卡托机构1上设置有采血机,所述采血机向所述卡托机构1发射定位激光a,所述定位激光a在所述卡托机构1 上形成光点。
57.在压脉处理过程中,所述驱动装置2带动所述卡托机构1移动并对手臂进行拉伸,所述充气压脉机构3在拉伸过程中实现对手臂血管的收紧与放松,当所述光点与所述采血位点重合时,所述采血机沿着所述定位激光a向所述采血位点进行采血。
58.进一步地,所述卡托机构1包括安装在所述驱动装置2上的底板101,所述底板101上设置有承托手臂的弧形槽托102,所述弧形槽托102的中间位置向下凹陷,所述弧形槽托102的一端设置有所述采血位点,所述弧形槽托102 的另一端设置有托板103,所述托板103倾斜设置在所述弧形槽托102上并用于对手肘进行固定。
59.所述充气压脉机构3的压脉位置设置在所述采血位点与所述托板103之间,所述底板101在移动过程中通过托板103带动手臂向所述采血位点移动,所述充气压脉机构3的压脉位置固定。
60.卡托机构1中手臂的承托位置向下凹陷,充气压脉机构3设置在凹陷的位置上,便于患者的使用。且在使用时,患者的手肘抵在托板103上,当底板101向前移动时,托板103带动患者的手臂向前移动,此时充气压脉机构3 对患者的手臂进行收紧,当底板101向后移动时,托板103带动患者的手臂向后移动,充气压脉机构3对患者的手臂收紧力度下降,此过程与压脉过程中患者紧握与放松拳头的过程相似,均用于在压脉过程中使得静脉血液回流,但不紧到压迫动脉流血。
61.在移动过程中,压脉过程全程自动,不需要患者去配合,简单方便。
62.进一步地,所述弧形槽托102上通过滑块6滑动安装有手把7,所述手把 7设置在靠近所述采血位点的一端,所述采血位点位于所述手把7与所述充气压脉机构3之间。
63.在弧形槽托102上安装手把7,有利于提高患者的使用感受,降低对采血的恐惧,同时起到一定凸出肌肉的作用,防止充气压脉机构3由于进压迫到了脂肪,导致在手臂移动的过程中,手臂从充气压脉机构3内脱落,影响压脉。
64.优选的,在控制组件的控制下,所述驱动装置2能够带动所述底板101 前后移动,形成压脉状态,且在所述压脉状态中,所述驱动装置2能够带动所述底板101以所述托板103为圆心往复摆动。
65.驱动装置2的移动是往复的,前后左右往复摆动,其具体的动作还需要根据采血机的具体定位方式去调整。
66.进一步地,所述充气压脉机构3包括分别固定设置在所述底板101两侧的支撑杆301,所述支撑杆301之间设置有环形气囊302,所述环形气囊302 安装在所述弧形槽托102上且设置在所述采血位点与所述托板103之间;
67.所述环形气囊302通过管道303与所述充气装置4连接,所述环形气囊 302内部设置有气压感应器,所述管道303内设置有感应气阀304,所述感应气阀304以及所述气压感应器均与所述控制组件连接,当所述气压感应器内的气压达到阀定值时向所述控制组件发射信号,所述控制组件向所述感应气阀304发射关闭信号。
68.控制组件为现有的公开技术,在本实施例中,可通过控制感应气阀304 的开关来控制环形气囊302的充气与放气,其中当环形气囊302对患者的肢体压迫至一定压力后,即停止对肢体的压迫,防止静脉血管无法流动。
69.相对于一般的压脉皮筋,环形气囊302的适应感受好,较为舒适。
70.优选的,为了使得患者的手臂更容易套入至环形气囊中,所述环形气囊 302的两端转动设置在所述支撑杆301上。
71.本发明还提供了一种自动采血机器人的手肘托的调节方法,包括如下步骤:
72.将手臂固定在手肘托上;
73.使用单线激光向下照射,形成采血光点;
74.对手臂的压脉位点进行微压固定,手臂上的血管形成轻微凸起;
75.使用多线激光对所述轻微凸起进行定位,形成光斑;
76.移动手肘托,使得光斑与采血光点重合,以完成调节。
77.进一步地,在所述手肘托移动过程中,所述压脉位点固定不变,以进行松紧式的压脉处理。
78.通过本实施例的自动采血机器人的手肘托及调节方法,实现手肘托移动以及压脉过程二者的相互作用,在适应性调整手臂位置的过程中加强对手臂的压力,使得手臂的血管更加突出,从而进一步便利血管的识别与穿刺。
79.以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。