技术特征:
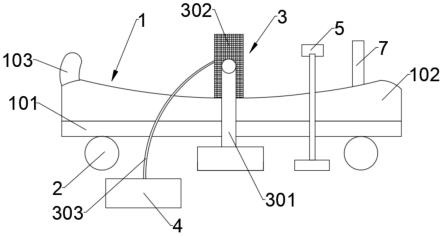
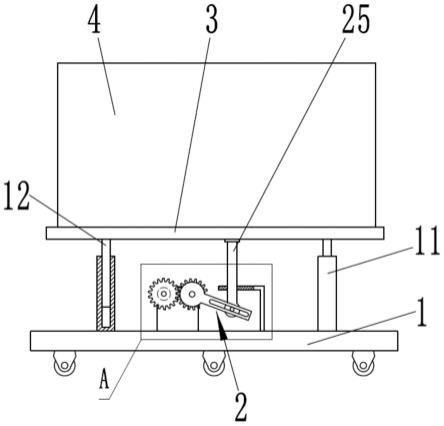
1.一种自动采血机器人的手肘托,其特征在于,包括:卡托机构(1),通过驱动装置(2)滑动设置在工作台上,且所述卡托机构(1)用于对手臂及手肘进行承托,所述卡托机构(1)的端部设置有血管的采血位点:充气压脉机构(3),固定安装在工作台上,且设置在所述卡托机构(1)上方,所述充气压脉机构(3)连接有充气装置(4)并在充气状态下对手臂进行压脉;控制组件,与所述充气压脉机构(3)以及所述驱动装置(2)通讯连接,所述控制组件用于控制所述充气压脉机构(3)内的气压以及所述驱动装置(2)的动作状态;其中,当所述充气压脉机构(3)内的气压达到额定气压时,所述充气压脉机构(3)形成对手臂的微压固定,此时所述卡托机构(1)带动手臂移动,所述充气压脉机构(3)在拉伸过程中形成对手臂的压脉处理。2.根据权利要求1所述的一种自动采血机器人的手肘托,其特征在于,所述卡托机构(1)上设置有视觉感应器(5),在压脉处理过程中,所述手臂血管向形成轻微隆起,所述视觉感应器(5)对隆起位置发射定位激光b,所述定位激光b映射在所述手臂血管上的光斑即为所述采血位点。3.根据权利要求1所述的一种自动采血机器人的手肘托,其特征在于,所述卡托机构(1)上设置有采血机,所述采血机向所述卡托机构(1)发射定位激光a,所述定位激光a在所述卡托机构(1)上形成光点;在压脉处理过程中,所述驱动装置(2)带动所述卡托机构(1)移动并对手臂进行拉伸,所述充气压脉机构(3)在拉伸过程中实现对手臂血管的收紧与放松,当所述光点与所述采血位点重合时,所述采血机沿着所述定位激光a向所述采血位点进行采血。4.根据权利要求1所述的一种自动采血机器人的手肘托,其特征在于,所述卡托机构(1)包括安装在所述驱动装置(2)上的底板(101),所述底板(101)上设置有承托手臂的弧形槽托(102),所述弧形槽托(102)的一端设置有所述采血位点,所述弧形槽托(102)的另一端设置有托板(103),所述托板(103)倾斜设置在所述弧形槽托(102)上并用于对手肘进行固定;所述充气压脉机构(3)的压脉位置设置在所述采血位点与所述托板(103)之间,所述底板(101)在移动过程中通过托板(103)带动手臂向所述采血位点移动,所述充气压脉机构(3)的压脉位置固定。5.根据权利要求4所述的一种自动采血机器人的手肘托,其特征在于,所述弧形槽托(102)上通过滑块(6)滑动安装有手把(7),所述手把(7)设置在靠近所述采血位点的一端,所述采血位点位于所述手把(7)与所述充气压脉机构(3)之间。6.根据权利要求3所述的一种自动采血机器人的手肘托,其特征在于,所述驱动装置(2)能够带动所述底板(101)前后移动,形成压脉状态,且在所述压脉状态中,所述驱动装置(2)能够带动所述底板(101)以所述托板(103)为圆心往复摆动。7.根据权利要求3所述的一种自动采血机器人的手肘托,其特征在于,所述充气压脉机构(3)包括分别固定设置在所述底板(101)两侧的支撑杆(301),所述支撑杆(301)之间设置有环形气囊(302),所述环形气囊(302)安装在所述弧形槽托(102)上且设置在所述采血位点与所述托板(103)之间;所述环形气囊(302)通过管道(303)与所述充气装置(4)连接,所述环形气囊(302)内部
设置有气压感应器,所述管道(303)内设置有感应气阀(304),所述感应气阀(304)以及所述气压感应器均与所述控制组件连接,当所述气压感应器内的气压达到阀定值时向所述控制组件发射信号,所述控制组件向所述感应气阀(304)发射关闭信号。8.根据权利要求7所述的一种自动采血机器人的手肘托,其特征在于,所述环形气囊(302)的两端转动设置在所述支撑杆(301)上。9.一种自动采血机器人的手肘托的调节方法,其特征在于,包括如下步骤:将手臂固定在手肘托上;使用单线激光向下照射,形成采血光点;对手臂的压脉位点进行微压固定,手臂上的血管形成轻微凸起;使用多线激光对所述轻微凸起进行定位,形成光斑;移动手肘托,使得光斑与采血光点重合,以完成调节。10.根据权利要求9所述的一种自动采血机器人的手肘托的调节方法,其特征在于,在所述手肘托移动过程中,所述压脉位点固定不变,以进行松紧式的压脉处理。
技术总结
本发明公开了一种自动采血机器人的手肘托及调节方法,包括卡托机构、充气压脉机构;其中,当所述充气压脉机构内的气压达到额定气压时,所述充气压脉机构形成对手臂的微压固定,此时所述卡托机构带动手臂移动,所述充气压脉机构在拉伸过程中形成对手臂的压脉处理。还包括如下步骤:将手臂固定在手肘托上;使用单线激光向下照射,形成采血光点;对手臂的压脉位点进行微压固定,手臂上的血管形成轻微凸起;使用多线激光对所述轻微凸起进行定位,形成光斑;移动手肘托,使得光斑与采血光点重合,以完成调节发明实现了在适应性调整手臂位置的过程中加强对手臂的压力,使得手臂的血管更加突出,从而进一步便利血管的识别与穿刺系统。从而进一步便利血管的识别与穿刺系统。从而进一步便利血管的识别与穿刺系统。
技术研发人员:陈冬萍 肖书萍 李玲 侯郭潇
受保护的技术使用者:华中科技大学同济医学院附属协和医院
技术研发日:2022.09.05
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。