一种基于滑模观测的风机电动变桨距电机驱动控制方法
1.本发明专利申请为分案申请,原案申请号为202010918643.x,申请日为2020年09月04日,发明名称为风机电动变桨距电机驱动控制系统。
技术领域
2.本发明涉及永磁同步电机技术领域,更具体地,尤其是涉及一种基于滑模观测的风机电动变桨距电机驱动控制方法。
背景技术:
3.永磁同步电机具有效率高、扭矩大、转速性能好等优点,被广泛应用在制造、电动汽车、工业生产等领域中。由于风速的随机性及气动效应的影响,风机变桨距的电机驱动控制系统为多变量强非线性不确定系统,负载惯性大,转矩变化快,且在不同风速和风向下要求的桨距角调速性能不同;传统风力发电机桨距角pi控制器的参数固定,鲁棒性不如滑模控制方法,但滑模控制方法在发生负载扰动或内部参数摄动时,会使电机速度产生明显的抖振。
技术实现要素:
4.本发明的目的是针对风机变桨距系统为多变量强非线性不确定系统,负载惯性大,转矩变化快,且在不同风速和风向下要求的桨距角调速性能不同的特点,提供一种将观测的负载转矩前馈补偿至电流调节器中,提高负载转矩观测响应速度并减少转矩观测波动性的基于滑模观测的风机电动变桨距电机驱动控制方法。永磁同步电机速度由滑模速度控制器控制,负载转矩观测器对负载转矩进行观测,负载转矩观测器的输出用于对滑模速度控制器的输出进行负载转矩补偿。负载转矩观测器根据负载转矩给定值的变化和负载转矩观测值的变化对反馈增益进行调整,依据转子角速度ω和电流iq对负载转矩进行观测,得到新的负载转矩观测值;q轴转矩电流给定值为转矩电流给定分量与转矩电流补偿分量之和。
5.滑模速度控制器的状态变量为
[0006][0007]
其中,ω是转子角速度,ω
*
是给定转子角速度;滑模速度控制器的滑模面为s=cx1 x2,c为滑模面参数,且c>0;滑模速度控制器输出负载转矩给定值和转矩电流给定分量i
′q为
[0008][0009]
其中,j是转动惯量,p是电机极对数,ψf是永磁体磁链;系数k1、k2、k3、k4为速度滑模控制的指数趋近率系数,且k1>0,k2>0,1<k3<2,k4>0。
[0010]
负载转矩观测器为
[0011][0012]
其中,为负载转矩观测值,是转子角速度估计值,g是负载转矩观测器的反馈增益且g<0;kg是负载转矩观测器的滑模增益且kg≤-|e2/j|,为负载转矩观测误差,t
l
为负载转矩。
[0013]
负载转矩观测器根据负载转矩给定值的变化和负载转矩观测值的变化对反馈增益进行调整的方法是:
[0014]
步骤1、负载转矩观测器依据现有反馈增益g值对负载转矩t
l
进行观测,得到负载转矩观测值滑模速度控制器进行控制运算得到负载转矩给定值
[0015]
步骤2、计算
[0016]
步骤3、判断是否大于ε1;当大于ε1时,取反馈增益g等于g
min
并退出;当小于等于ε1时,进入步骤4;
[0017]
步骤4、判断是否大于ε2;当大于ε2时,取反馈增益g等于g
min
并退出;当小于等于ε2时,取反馈增益g等于g
max
并退出。
[0018]
其中,ε1为给定转矩变化比较阈值,且ε1>0;ε2为观测转矩变化比较阈值,且ε2>0;g
max
为反馈增益高值,g
min
为反馈增益低值,且g
min
<g
max
<0。
[0019]
转矩电流补偿分量i
″q为
[0020][0021]
q轴转矩电流给定值为
[0022][0023]
负载转矩观测器参数采用粒子群算法进行优化整定,方法是:
[0024]
步骤201,初始化粒子群;粒子初始位置为其中m为粒子数量;待优化的参数向量为θ1=[g
max
,g
min
,ε1,ε2,α];
[0025]
步骤202,粒子速度和粒子群最优解初始化;将各粒子的初始位置作为各粒子的初始最优值,计算每个粒子的适应度值并作为各粒子的最优粒子适应度值保存;对各粒子适应度值进行比较得到初始粒子群最优解和粒子群最优适应度值并保存;
[0026]
步骤203,按照式
[0027][0028]
p
n 1
=pn u
n 1
[0029]
更新各粒子的速度和位置;n为当前的迭代次数,un和pn是粒子的速度向量和位置;c0为惯性权重,取值范围在0~1.4之间;c1、c2为学习因子,在1~2之间取值;
为取值范围在0~1内的随机数;为粒子本身至目前为止找到的最优解,表示整个种群到目前为止的粒子群最优解;
[0030]
步骤204,计算每个粒子的适应度值;
[0031]
步骤205,对和相应的最优粒子适应度值进行更新,对和相应的粒子群最优适应度值进行更新;
[0032]
步骤206,判断是否满足循环终止条件,如果是,则结束粒子群算法,最终的粒子群最优解为滑模速度控制器的最优参数;否则,返回步骤203。
[0033]
步骤202和步骤204中计算每个粒子的适应度值的目标函数为
[0034][0035]
q2为粒子的适应度值;为负载转矩观测误差,e2(t)为负载转矩观测误差瞬时值,t
p
为电机负载转矩观测阶跃响应的跟踪调节时间,t=0为负载转矩观测阶跃响应的负载突变时刻;q
21
中的第二项γ
p1
(1-sgn(e2(t) t
δ
))为转矩观测跟踪超调罚函数,t
δ
为转矩观测跟踪超调限值,γ
p1
取一个足够大的正数;max(|e2(t)|)为最大转矩观测稳态抖差绝对值,γ
p2
为适应度平衡侧重系数,取大于0的常数;q
22
中第二项γ
p1
(1-sgn(e2(t) t
δ
)为转矩观测稳态抖差罚函数,t
δ
为负载转矩观测稳态抖差限值;γ
p3
≥2。
[0036]
步骤201中,g
max
与g
max
的关系为g
min
与g
min
的关系为kg与α的关系为
[0037][0038]
其中,α≥1;进一步地,α值在1~5的范围内选择。
[0039]
滑模速度控制器参数采用粒子群算法进行优化整定,方法是:
[0040]
步骤101,初始化粒子群;粒子初始位置为其中m为粒子数量;待优化的参数向量为θ=[c,k1,k2,k3,k4];将各粒子的初始位置作为各粒子的初始最优值,计算每个粒子的适应度值并作为各粒子的最优粒子适应度值保存;对各粒子适应度值进行比较得到初始粒子群最优解和粒子群最优适应度值并保存;
[0041]
步骤102,按照式
[0042][0043]mn 1
=mn v
n 1
[0044]
更新各粒子的速度和位置;n为当前的迭代次数,vn和mn是粒子的速度向量和位置;c0为惯性权重,取值范围在0~1.4之间;c1、c2为学习因子,在1~2之间取值;为取值范围在0~1内的随机数;为粒子本身至目前为止找到的最优解,表示整个种群到目前为止的粒子群最优解;
[0045]
步骤103,计算每个粒子的适应度值;
[0046]
步骤104,对和相应的最优粒子适应度值进行更新,对和相应的粒子群最优适应度值进行更新;
[0047]
步骤105,判断是否满足循环终止条件,如果是,则结束粒子群算法,最终的粒子群最优解为滑模速度控制器的最优参数;否则,返回步骤102。
[0048]
步骤101和步骤103中计算每个粒子的适应度值的目标函数为
[0049][0050]
其中,q1为粒子的适应度值;e(t)为转子角速度误差瞬时值,tm为电机转子角速度阶跃响应的过渡过程时间,t=0为电机阶跃响应的启动时刻;q
11
中的第二项γ
m1
(1-sgn(e(t)ωδ为角速度超调罚函数,其中γm1为一个足够大的正数,ωδ为转子角速度超调量限值;q
12
为稳态抖差罚函数,ω
δ
为转子角速度稳态抖差限值;γ
m2
≥2。
[0051]
所述基于滑模观测的永磁同步电机控制方法检测永磁同步电机的转子位置θ、和三相电流ia、ib和ic;依据三相电流ia、ib和ic对永磁同步电机进行clark变换得到在α-β轴坐标系下的电流i
α
、电流i
β
,依据电流i
α
、电流i
β
和转子位置θ进行park变换,得到在d-q轴坐标系下的电流id、电流iq。
[0052]
所述基于滑模观测的永磁同步电机控制方法由包括滑模速度控制器、负载转矩观测器、q轴电流控制器、d轴电流控制器、clarke变换模块、位置与速度检测模块、park变换模块、park逆变换模块、svpwm模块和三相逆变器的电机驱动控制系统实现。
[0053]
本发明的有益效果是,将负载转矩观测值前馈补偿至电流调节器的给定值中,在不需要滑模速度控制器输出的给定电流部分产生较大调整的情况下,就能抵消负载发生扰动或者是系统参数发生变化所造成的相关影响,有效地削弱了系统的抖振。负载转矩观测采用反馈增益依据负载转矩给定值的变化量进行自动调整的算法,反馈增益g同时依据负载转矩给定值的变化量δt
l*
和负载转矩观测值的变化量进行自动调整,当给定转速改变使负载转矩给定值t
l*
改变,负载转矩观测值还没有发生变化时,就提前调整反馈增益g,当负载转矩观测值真正产生观测误差时,能够加快观测器的响应速度,尽快消除(减小)负载转矩观测值的观测误差,进而改善电机速度控制的快速性与精确性。同样地,当系统模型参数发生变化使负载转矩给定值t
l*
先于负载转矩观测值发生改变时,反馈增益g同时依据负载转矩给定值的变化量δt
l*
和负载转矩观测值的变化量进行自动调整,能够提前调整反馈增益g,加快观测器的响应速度,尽快消除(减小)负载转矩观测值的观测误差,并进一步改善电机速度控制的快速性与精确性。如果负载发生扰动导致观测值发生改变时,发生较大变化时,反馈增益g也能够进行自动调整,以尽快消除(减小)负载转矩观测值的观测误差,使负载转矩观测值尽快跟上负载转矩t
l
的变化。
附图说明
[0054]
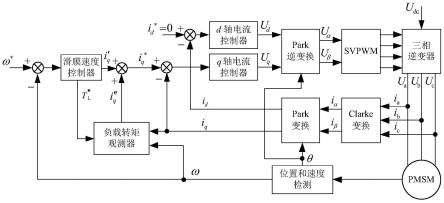
图1为风机电动变桨距电机驱动控制系统实施例1框图;
[0055]
图2为反馈增益自动调整方法实施例1流程图;
[0056]
图3为反馈增益自动调整方法实施例2流程图;
[0057]
图4为风机电动变桨距电机驱动控制系统实施例2框图;
[0058]
图5为反馈增益自动调整方法实施例3流程图;
[0059]
图6为给定的转子角速度为正弦波信号和负载转矩信号;
[0060]
图7为1个正弦波周期的转子角速度信号和转子角速度响应示意图;
[0061]
图8为在给定转子角速度信号和转子角速度响应信号负穿越示意图。
具体实施方式
[0062]
以下结合附图及实施例,对本发明进行进一步详细说明。
[0063]
图1为风机电动变桨距电机驱动控制系统实施例1的框图。图1中,clarke变换模块输入永磁同步电机(即pmsm)的三相电流ia、ib和ic,输出两相静止α-β轴坐标系下的电流i
α
、i
β
;位置与速度检测模块中的位置传感器检测永磁同步电机的转子位置θ后转换为转子角速度ω输出;park变换模块输入电流i
α
、i
β
和转子位置θ,输出旋转d-q轴坐标系下的电流id、iq;滑模速度控制器smc输入转子给定角速度ω
*
和转子角速度ω,输出负载转矩给定值t
l*
和转矩电流给定分量i
′q;负载转矩观测器输入负载转矩给定值t
l*
、转子角速度ω和电流iq,输出转矩电流补偿分量i
″q;转矩电流给定分量i
′q和转矩电流补偿分量i
″q相加后,作为q轴转矩电流给定值i
*q
;q轴电流pi控制器输入q轴转矩电流给定值i
*q
和电流id,输出q轴坐标系下的控制电压uq;d轴电流pi控制器输入q轴转矩电流给定值i
*d
和电流id,输出d轴坐标系下的控制电压ud,d轴转矩电流给定值i
*d
等于0;park逆变换模块输入d-q轴坐标系下的控制电压ud、uq,输出α-β轴坐标系下的控制电压u
α
、u
β
;svpwm模块(即空间矢量脉宽调制模块)输入控制电压u
α
、u
β
,输出脉冲信号至三相逆变器,三相逆变器将直流电压u
dc
转换为三相交流电源ua、ub、uc,从而驱动永磁同步电机运转。
[0064]
忽略铁心涡流与磁滞损耗等影响,采用id=0的pmsm转子磁场定向控制,建立pmsm在d-q轴旋转坐标系下的数学模型,电压方程为:
[0065][0066]
对于采用id=0控制方式的凸极式pmsm矢量控制系统,电磁转矩方程为:
[0067][0068]
pmsm运动方程为:
[0069][0070]
式(1)(2)(3)中,ud、uq分别是d-q轴的电压;id、iq分别是d-q轴的电流;ld、lq分别是d-q轴的电感;te是电磁转矩;t
l
是负载转矩;r是定子的电阻;p是电机极对数;ωe是转子电角速度,即角频率;ω是转子角速度,即电机转子机械角速度;ψf是永磁体磁链;j是转动惯
量;b是摩擦系数;t是时间。
[0071]
令电机的转子角速度误差e=ω
*-ω,ω
*
是电机的给定转子角速度。定义风机电动变桨距电机驱动控制系统实施例1的状态变量为:
[0072][0073]
由式(2)、(3)、(4)得:
[0074][0075]
对式(5)进行化简,令d=1.5pψf/j,可得实施例1系统状态空间方程为:
[0076][0077]
选择滑模面函数为:
[0078]
s=cx1 x2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0079]
式(7)中,s为滑模面,c为滑模面参数,且c>0。式(7)中c为转子角速度误差项的系数,其大小对控制作用的影响类主要似于pid控制中的比例系数,c的取值同时还兼顾平衡转子角速度误差和转子角速度误差变化率,通常情况下,在大于0且小于1000的范围内选取,例如,取c=60。对式(7)求导可得:
[0080][0081]
传统指数趋近律的表达式为:
[0082][0083]
式(9)中,sgn()为符号函数,-k1sgn(s)为等速趋近项,-k2s为指数趋近项,k1、k2两个系数分别决定滑模面的抖振和趋近过程的运动品质,且k1、k2均大于0。为提高系统响应速度,在传统指数趋近率的基础上改进,等速趋近项改变为变速趋近项,改进的趋近律为:
[0084][0085]
其中k1>0,k2>0,1<k3<2,k4>0。当电机的转子角速度误差|x1|较大时,变速趋近项趋近速度较大,可加快滑模趋近运动速度;当|x1|较小时,变速趋近项趋近速度较小,可减弱抖振。k4取值可以参照永磁同步电机稳定运行时的转子角速度稳态抖差限值,建议在该允许稳态抖差限值的80%至400%范围内取值;例如,设允许的永磁同步电机转子角速度稳态抖差限值是5rad/s(弧度/秒),则k4可以在4~20范围内取值。k3越大,则变速越大,k3一般在1.05~1.3范围内取值。一般地,系数k1和系数k2的取值均小于2000;系数k2越大,系统状态能以较大速度趋近于滑动模态;系数k1决定到达切换面的速度,k1越小则穿越切换面的距离和抖动越小。k1和k2分别为变速趋近项系数和指数趋近项系数,由于的值在1附近变化,因此,式(10)中变速趋近项系数k1和指数趋近项系数k2可以按照调整传统指数趋近率中等速趋近项系数和指数趋近项系数的方法进行整定。k3为变速系数,其大小改变变速快慢;k4是迁移系数,其大小改变变速临界
点。
[0086]
结合式(8)和(10),将计算得出的q轴给定电流作为转矩电流给定分量i
′q,可得滑模速度控制器输出的负载转矩给定值t
l*
和转矩电流给定分量i
′q为:
[0087][0088]
风机电动变桨距电机驱动控制系统实施例1滑模速度控制器输出中含有积分项,将控制量进行滤波,可削弱系统抖振、减少系统的稳态误差。定义lyapunov函数为:
[0089][0090]
由式(10)和式(12)可得:
[0091][0092]
式(13)中,k1>0,k2>0,s
·
sgn(s)≥0,故表明系统跟踪误差能在有限时间内收敛到零,系统能稳定运行。
[0093]
设计风机电动变桨距电机驱动控制系统实施例1滑模速度控制器时整定参数c、k1、k2、k3、k4的人工方法是,首先确定k3、k4的值;令q轴转矩电流给定值i
*q
只包括输入转矩电流给定分量i
′q(即不进行负载转矩补偿控制),然后在系统的滑动模态从小到大调整滑模面参数c和变速趋近项系数k1的值,直到系统出现明显抖振,在此基础上兼顾抑制抖振和系统状态收敛速度,适当减小滑模面参数c和变速趋近项系数k1的值;最后,在兼顾抑制滑动模态抖振的情况下,主要依据系统到达段(例如,阶跃响应的电机启动阶段)的快速性来调整指数趋近项系数k2的值,并对滑模速度控制器的其他参数值进行适当微调。
[0094]
设计风机电动变桨距电机驱动控制系统实施例1滑模速度控制器时,对控制器参数还可以采用粒子群算法、狼群算法、遗传算法等优化算法进行整定。采用粒子群算法对参数c、k1、k2、k3、k4进行整定的具体方法是:
[0095]
建立综合评价风机电动变桨距电机驱动控制系统实施例1滑模速度控制器各项性能指标的目标函数为
[0096][0097]
式(14)中,q
11
中的积分项为电机转子角速度阶跃响应的iae准则(误差积分准则),e(t)为转子角速度误差瞬时值,tm为电机转子角速度阶跃响应的过渡过程时间,t=0为电机阶跃响应的启动时刻;q
11
中的第二项γ
m1
(1-sgn(e(t) ω
δ
))为角速度超调罚函数,其中γ
m1
取一个足够大(合理值的5倍及以上)的正数,ω
δ
为转子角速度超调量限值(即系统允许的转子角速度超调量最大值);当电机转子角速度阶跃响应的超调量没有超过转子角速度超调量限值ω
δ
时,超调罚函数项等于0,否则等于γ
m1
;q
12
为稳态抖差罚函数,ω
δ
为转子角速度稳态抖差限值;当电机转子角速度阶跃响应的稳态抖差没有超过转子角
速度稳态抖差限值ω
δ
时,稳态抖差罚函数项等于0,否则等于γ
m1
;q1为目标函数值,即粒子群算法对滑模速度控制器进行参数优化的适应度值;粒子的适应度值越小,相应的位置越优。γ
m1
取值时,首先预估的合理值(上限);例如,设电机的额定转速为1500r/min(对应于额定转子角速度为157rad/s),启动时间在0.2s左右,则的合理值不超过40,γ
m1
取相对于40的5倍及以上即可,例如,取γ
m1
=200。γ
m2
一般取值大于等于2,其大小决定在多长的时间区间进行转子角速度稳态抖差的测量,例如,γ
m2
取值等于6时,则在5倍过渡过程时间tm的区间进行转子角速度稳态抖差的测量。速度控制器参数优化如果需要考虑其他指标因素时,例如,过渡过程时间是否足够短,稳态误差是否足够小,等等,可以建立式(14)之外的其他目标函数。
[0098]
滑模速度控制器待优化的参数向量为θ=[c,k1,k2,k3,k4],粒子群算法的搜索空间维度n为5,构造出的粒子中的最优位置值即为滑模速度控制器的最优参数。粒子群算法的具体步骤是:
[0099]
步骤101,初始化粒子群。设粒子初始位置为其中m为粒子数量,一般在20~150之间选取,初始位置要求服从随机分布;第i粒子的位置表示为对应于待优化的参数向量为θ=[c,k1,k2,k3,k4];位置取值区间为[m
imin m
imax
],范围区间可以根据现有知识或经验给出,例如,参数c的取值区间[m
1min m
1max
]为[0 1000],参数k1的取值区间[m
2min m
2max
]为[0 2000],参数k2的取值区间[m
3min m
3max
]为[0 2000],参数k3的取值区间[m
4min m
4max
]为[1.03 1.3],参数k4的取值区间[m
5min m
5max
]为[4 20]。将各粒子的初始位置m
(0)
作为各粒子的初始最优值m
b(0)
,按照式(14)计算每个粒子的适应度值并作为各粒子的最优粒子适应度值保存;对各粒子适应度值进行比较得到初始粒子群最优解m
g(0)
和粒子群最优适应度值并保存。设粒子的初始速度为同样服从随机分布,第i粒子的初始速度则表示为参数的速度变化极值[v
imin v
imax
]一般设为参数取值区间范围的5%~20%;例如,参数k3的取值区间[m
4min m
4max
]为[1.03 1.3],区间范围是0.27,则各粒子第4维变量(参数k3)的速度变化极值[v
4min v
4max
]按照5%取值是[-0.013 0.013],按照20%取值是[-0.054 0.054]。
[0100]
步骤102,按照式
[0101][0102]
更新各粒子的速度和位置;各维变量的速度变化不能超过各维变量相应的速度变化极值,各维变量的更新位置不能超出各维变量相应的取值区间。式(15)中,n为当前的迭代次数,vn和mn是粒子的速度向量和位置;c0为惯性权重,取值范围在0~1.4之间,调整其值可以改变搜索范围和搜索速度,进一步地,随迭代次数增加自适应减小c0值有利于在搜索能力和收敛速度之间取得平衡;c1、c2为学习因子,在1~2之间取值,建议均取等于2;
为取值范围在0~1内的随机数;为粒子本身至目前为止找到的最优解(最优位置),表示整个种群到目前为止的粒子群最优解(最优位置)。
[0103]
步骤103,按照式(14)计算每个粒子的适应度值。
[0104]
步骤104,对和相应的最优粒子适应度值进行更新,对和相应的粒子群最优适应度值进行更新。
[0105]
步骤105,判断是否满足循环终止条件,如果是,则结束粒子群算法,最终的粒子群最优解为滑模速度控制器的最优参数;否则,返回步骤102。
[0106]
循环终止条件一般为达到最大迭代步数限制或最优粒子适应值小于某一阈值。采用粒子群算法对参数c、k1、k2、k3、k4进行整定时,采用最大迭代步数限制方式作为循环终止条件,最大迭代步数通常在100~2000之间选取。同时设置粒子群最优适应度值的阈值条件时,设电机的额定转速为1500r/min(对应于额定转子角速度为157rad/s),启动时间要求在0.2s之内,则粒子群最优适应度值的阈值可以设定为15。
[0107]
按照式(14)计算每个粒子的粒子适应度值,要求依次将每个粒子作为相应的控制器参数,控制电机启动(或者是仿真系统中启动),得到公式(14)中所需的电机转子角速度阶跃响应的e(t),依据e(t)确定过渡过程时间tm,计算得到粒子适应度值q1。
[0108]
根据pmsm电磁转矩与运动方程,对于恒定的阶跃性负载,在变化周期内可认为是一恒定值,即将转子角速度与负载转矩作为状态变量,构成pmsm状态方程为:
[0109][0110]
在式(16)基础上,以负载转矩与转子角速度为观测对象,建立负载转矩观测器实施例1为:
[0111][0112]
式(17)中,是负载转矩的观测值,是转子角速度估计值,g是负载转矩观测器的反馈增益,kg是负载转矩观测器实施例1的滑模增益,负载转矩观测器实施例1为滑模观测器。电机摩擦与负载转矩相比较,所占比重小,令b=0,忽略摩擦的影响,则式(17)的负载转矩观测器实施例1变为:
[0113][0114]
依据b=0时的(16)和式(18),得到负载转矩观测器实施例1的误差方程为:
[0115][0116]
式(19)中,为转子角速度估算误差,为负载转矩观测误
差,并定义观测器滑模面为根据滑模可达性条件,式(18)观测器系统稳定条件为kg≤-|e2/j|,且g<0。
[0117]
在式(16)基础上,以负载转矩与电机转子角速度为观测对象,还可以建立负载转矩观测器实施例2为:
[0118][0119]
电机摩擦与负载转矩相比较,所占比重小,令b=0,忽略摩擦的影响,则式(20)的负载转矩观测器实施例2变为:
[0120][0121]
式(20)、(21)中,是负载转矩的观测值,是转子角速度估计值,g是负载转矩观测器的反馈增益,kw是负载转矩观测器实施例2的比例增益,负载转矩观测器实施例2为状态观测器。依据b=0时的式(16)和式(21),得到负载转矩观测器实施例2误差方程为:
[0122][0123]
式(22)中,为转子角速度估算误差,为负载转矩观测误差。式(21)的状态观测器是一个自治的线性系统,在kw<0,且g<0时,该观测器是渐近稳定的。负载转矩观测器实施例1的式(17)和负载转矩观测器实施例2的式(20)均考虑了电机的摩擦因素,小摩擦阻尼的加入,会给系统响应的快速性带来不利影响,但可以使稳定性分别在式(18)和式(21)的基础上增加。
[0124]
选择式(17)、(18)的观测器实施例1时,滑模增益kg的整定方法是,按照
[0125][0126]
进行选择。式(23)中,α≥1;一般地,α值在1~5的范围内选择,例如,选择α等于1.5。负载转矩观测器实施例1在观测负载转矩的过程中,kg的绝对值选择过小,当|e2|较大时观测器不能进入滑模状态;kg的绝对值选择足够大,可保证观测器进入滑模状态,但负载转矩的稳态观测波动变大;kg的值随着负载转矩观测误差的变化而变化,可以同时兼顾增加观测器稳定性和减小负载转矩的稳态观测波动。
[0127]
选择式(20)、(21)的观测器实施例2时,比例增益kw的整定方法是,按照
[0128][0129]
进行选择。式(24)中,tn是电机的额定转矩,β>0;一般地,β值在1~20的范围内选择,例如,选择β=10。β选择增大时,负载转矩观测的稳态波动变大,但转矩观测跟踪超调量变小;β选择减小时,负载转矩观测的稳态波动变小,但转矩观测跟踪超调量变大。
[0130]
在式(17)、(18)或者式(20)、(21)所表示的观测器中,反馈增益g的取值大小对负载转矩观测结果影响较大。反馈增益g越大,观测转矩波动性越小,但观测转矩辨识速度越慢;反馈增益g越小,观测转矩速度越快,但观测转矩波动性越大。出于对此问题的考虑,在传统负载转矩观测器中,综合考虑负载转矩的观测速度与波动性,将反馈增益g取一个折中值,但这会舍弃大反馈增益时的波动性小和小反馈增益时的观测速度快的优势。
[0131]
电机滑模速度控制主要通过增大控制器中不连续项的幅值来抑制参数变化和外部负载扰动对系统的影响,但幅值增大会引起滑模固有抖振。为解决滑模控制系统抖振与抗扰性之间的矛盾,利用观测器实时观测负载扰动变化,将负载转矩观测值前馈补偿至电流调节器中,以降低滑模控制中不连续项幅值,削弱参数变化导致给定转矩变化,或者是负载扰动所引起系统抖振。为了充分利用反馈增益g在高、低值时的优势,根据两相邻时刻负载转矩观测值以及负载转矩给定值变化量的大小,在负载转矩给定值变化小且负载转矩观测值变化小时,给予反馈增益g较大值,使观测结果波动性小,稳定性更强;在负载转矩给定值变化大或者负载转矩观测值变化大时,给予反馈增益g较小值,使观测速度加快,最终通过对反馈增益g的调整,得到观测速度快和波动小、稳定性更强的综合结果。
[0132]
负载转矩观测器实施例1,或者是负载转矩观测器实施例2用于图1风机电动变桨距电机驱动控制系统实施例1中时,负载转矩观测器根据负载转矩给定值和负载转矩观测值的变化对反馈增益g进行调整,依据转子角速度ω和电流iq对负载转矩进行观测,得到新的负载转矩观测值
[0133]
图2为反馈增益自动调整方法实施例1流程图,在负载转矩观测器实施例1,或者是负载转矩观测器实施例2用于图1风机电动变桨距电机驱动控制系统实施例1中时,进行反馈增益自动调整。图2中,ε1为给定转矩变化比较阈值,ε2为观测转矩变化比较阈值,δt
l*
为最近2次负载转矩给定值之间的差值,为最近2次负载转矩观测值之间的差值。在一次电机驱动控制系统的周期性控制过程中,图2中的(b)所示反馈增益g的调整晚于负载转矩观测和滑模速度控制器的输出计算,有:
[0134]
步骤1、负载转矩观测器依据现有反馈增益g值对负载转矩t
l
进行观测,得到负载转矩观测值滑模速度控制器进行控制运算得到负载转矩给定值此时的为为为至周期性控制过程的下一次进行反馈增益g调整时,该次变为变为
[0135]
步骤2、计算
[0136]
步骤3、判断是否大于给定转矩变化比较阈值ε1;当大于给定转矩变化比较阈值ε1时,取反馈增益g等于g
min
并退出;当小于等于给定转矩变化比较阈值ε1时,进入步骤4;
[0137]
步骤4、判断是否大于观测转矩变化比较阈值ε2;当大于观测转矩变化比较阈值ε2时,取反馈增益g等于g
min
并退出;当小于等于观测转矩变化比较阈值ε2时,取反馈增益g等于g
max
并退出。
[0138]
在一次电机速度的周期性控制过程中,图2中的(a)所示反馈增益g的调整先于负
载转矩观测和滑模速度控制器的输出计算,其反馈增益g调整方法将上述步骤1变为步骤4,步骤2-4变为步骤1-3,各步骤中的退出改为进入步骤4,且3,各步骤中的退出改为进入步骤4,且δtl*=tl*k-1-tl*k-2。
[0139]
当|δt
l*
|大于ε1时,表明负载转矩给定值t
l*
因系统模型参数变化、转子角速度给定值变化、转子角速度实际值变化而处于较大变化状态,负载转矩观测值要么波动已经较大,要么将会有较大的波动,反馈增益g选择等于g
min
进行负载转矩的快速辨识与观测;当|δt
l*
|小于等于ε1,且大于ε2时,表明负载转矩观测值波动大,反馈增益g选择等于g
min
进行负载转矩的快速辨识与观测;当|δt
l*
|小于等于ε1,且小于等于ε2时,表明负载转矩给定值变化小且状态负载转矩观测值波动小,反馈增益g选择等于g
max
进行转矩辨识与观测。图2中,ε1>0,ε2>0,ε1、ε2的具体取值与滑模速度控制器的采样控制周期(周期时间)、永磁同步电机及其负载情况相关,ε1、ε2均在大于0,且一般小于额定转矩5%的范围内取值,ε1、ε2可以取相同值,或者取不同值,例如,额定转矩为22n
·
m,可以取ε1=ε2=0.2n
·
m,或者取ε1=0.2n
·
m,ε2=0.25n
·
m。反馈增益g的取值满足g
min
<g
max
<0,一般情况下,g
min
≥-5000。g
min
取值应在负载转矩突变时,负载转矩观测器输出观测值的转矩观测跟踪超调量处于转矩观测跟踪超调限值之内;g
max
取值应在负载转矩不变,负载转矩观测器和滑模速度控制器均处于稳态时,最近2次负载转矩观测值的变化量小于ε2;例如,选择反馈增益g
max
=-0.5,g
min
=-10。选取g
min
和g
max
值的具体方法是,首先,在负载转矩不变,负载转矩观测器和滑模速度控制器均处于稳态时,令反馈增益g从一个较大值开始,例如,令反馈增益g从-0.01开始逐渐减小,负载转矩观测的稳态抖差会逐渐增大,当负载转矩观测的稳态抖差达到负载转矩观测稳态抖差限值时,确定此时的反馈增益g值为g
max
,保持负载转矩不变且令反馈增益g等于g
max
,同时连续进行f1次值的测量,并将f1次测量中最大f2个测量值的平均值作为观测转矩变化比较阈值ε2,给定转矩变化比较阈值ε1在观测转矩变化比较阈值ε2的0.5~1.5倍范围内取值;然后,当负载转矩观测器和滑模速度控制器均处于稳态时令负载转矩突变,在保证负载转矩观测器输出观测值的转矩观测跟踪超调量处于转矩观测跟踪超调限值之内的前提下,以负载转矩观测器输出观测值的跟踪调节时间尽量短来调节并确定g
min
值。
[0140]
图3为反馈增益自动调整方法实施例2流程图,在负载转矩观测器实施例1,或者是负载转矩观测器实施例2用于图1风机电动变桨距电机驱动控制系统实施例1中时,进行反馈增益自动调整。图3中,ε为转矩变化比较阈值,δt
l*
为最近2次负载转矩给定值之间的差值,为最近2次负载转矩观测值之间的差值。在一次驱动控制系统中电机的周期性控制过程中,图3中的(b)所示反馈增益g的调整晚于负载转矩观测和滑模速度控制器的输出计算,有:
[0141]
步骤i、负载转矩观测器依据现有的反馈增益g值对负载转矩t
l
进行观测,得到负载转矩观测值滑模速度控制器进行控制运算得到此时的为为至下一次进行反馈增益g调整时,该次变为变为
[0142]
步骤ii、计算
[0143]
步骤iii、判断是否大于ε;当大于ε时,取反馈增益g等于g
min
;当小于等于ε时,取反馈增益g等于g
max
;
[0144]
在一次电机速度的周期性控制过程中,图3中的(b)所示反馈增益g的调整先于负载转矩观测和滑模速度控制器的输出计算,其反馈增益g调整方法将上述步骤i变为步骤iii,步骤ii-iii变为步骤i-ii,且ii,且
[0145]
当最近2次负载转矩给定值的变化量与负载转矩观测值的变化量之和大于ε时,表明负载转矩观测值波动大,或者是因系统模型参数变化、转子角速度给定值变化、转子角速度实际值变化,使负载转矩给定值变化大并将引起负载转矩观测值有较大波动,反馈增益g选择等于g
min
进行负载转矩的快速辨识与观测;当小于等于ε时,表明负载转矩给定值变化小且状态负载转矩观测值波动小,反馈增益g选择等于g
max
进行负载转矩辨识与观测。图3中,ε>0,ε的具体取值与滑模速度控制器的采样控制周期(周期时间)、永磁同步电机及其负载情况相关,ε在大于0,且一般小于额定转矩5%的范围内取值,例如,额定转矩为22n
·
m,可以取ε=0.2n
·
m,或者取ε=0.3n
·
m。反馈增益g的取值满足g
min
<g
max
<0,一般情况下,g
min
≥-5000。g
min
取值应在负载转矩突变时,负载转矩观测器输出观测值的转矩观测跟踪超调量处于转矩观测跟踪超调限值之内;g
max
取值应在负载转矩不变,负载转矩观测器和滑模速度控制器均处于稳态时,最近2次负载转矩给定值的变化量与负载转矩观测值的变化量之和小于ε;例如,选择反馈增益g
max
=0.5,g
min
=-10。选取g
min
和g
max
值的具体方法是,首先,在负载转矩不变,负载转矩观测器和滑模速度控制器均处于稳态时,令反馈增益g从一个较大值开始,例如,令反馈增益g从-0.01开始逐渐减小,负载转矩观测的稳态抖差会逐渐增大,当负载转矩观测的稳态抖差达到负载转矩观测稳态抖差限值时,确定此时的反馈增益g值为g
max
,保持负载转矩不变且令反馈增益g等于g
max
,同时连续进行f1次|δt
l*
|值和值的测量,并将f1次测量中最大f2个之和的平均值作为转矩变化比较阈值ε;然后,当负载转矩观测器和滑模速度控制器均处于稳态时令负载转矩突变,在保证负载转矩观测器输出观测值的转矩观测跟踪超调量处于转矩观测跟踪超调限值之内的前提下,以负载转矩观测器输出观测值的跟踪调节时间尽量短来调节并确定g
min
值。图2和图3中,g
max
为反馈增益高值,g
min
为反馈增益低值。
[0146]
对观测器参数还可以采用粒子群算法、狼群算法、遗传算法等优化算法进行整定。采用粒子群算法对用于风机电动变桨距电机驱动控制系统实施例1中的负载转矩观测器实施例1或者是负载转矩观测器实施例2中参数进行整定的具体方法是:
[0147]
建立综合评价风机电动变桨距电机驱动控制系统实施例1中负载转矩观测器各项性能指标的目标函数为
[0148][0149]
式(25)中,q
21
中的积分项为电机负载转矩观测阶跃响应的iae准则,为负载转矩观测误差,e2(t)为负载转矩观测误差瞬时值,t
p
为电机负载转矩观测阶跃响应的跟踪调节时间,t=0为负载转矩观测阶跃响应的负载突变时刻;q
21
中的第二项γ
p1
(1-sgn(e2(t) t
δ
))为转矩观测跟踪超调罚函数,其中γ
p1
取一个足够大(合理值的5倍及以上)的正数,t
δ
为转矩观测跟踪超调限值,当转矩观测跟踪超调量没有超过转矩观测跟踪超调限值t
δ
时,转矩观测跟踪超调罚函数项等于0,否则等于γ
p1
。q
22
中第一项中max(|e2(t)|)为最大转矩观测稳态抖差绝对值,γ
p2
为适应度平衡侧重系数,取大于0的常数;q
22
中第二项γ
p1
(1-sgn(e2(t) t
δ
))为转矩观测稳态抖差罚函数,t
δ
为负载转矩观测稳态抖差限值;当转矩观测稳态抖差没有超过负载转矩观测稳态抖差限值t
δ
时,转矩观测稳态抖差罚函数项等于0,否则等于γ
p1
。q2为目标函数值,即采用粒子群算法对负载转矩观测器参数进行整定的适应度值;粒子的适应度值越小,相应的位置越优。γ
p1
取值时,首先预估的合理值(上限);例如,设电机的额定转矩为22n
·
m,预计最大的转矩观测跟踪调节时间t
p
在0.1s左右,则式(25)中iae准则积分项数值不超过2;适应度平衡侧重系数γ
p2
的作用有2个,一是平衡iae准则积分项和最大转矩观测稳态抖差绝对值项,例如,设负载转矩观测稳态抖差限值t
δ
为1n
·
m,则γ
p2
取2时,iae准则积分项和最大转矩观测稳态抖差绝对值项相对平衡,或者说两者在目标函数值q2中所起到的作用相当,此时的合理值不超过4,γ
p1
取等于20,或者是大于20的常数即可。减小γ
p2
值,则目标函数值q2中iae准则积分项的权重变大,更加偏向于转矩观测的快速性;增大γ
p2
值,则目标函数值q2中最大转矩观测稳态抖差绝对值项的权重变大,更加偏向于转矩观测的稳态性能。γ
p3
一般取值大于等于2,其大小决定在多长的时间区间进行负载转矩观测稳态抖差的测量,例如,γ
p3
取值等于6时,则在5倍跟踪调节时间(即过渡过程时间)t
p
的区间进行负载转矩观测稳态抖差的测量。
[0150]
粒子群算法优化风机电动变桨距电机驱动控制系统实施例1中负载转矩观测器参数的具体步骤是:
[0151]
步骤201,初始化粒子群。设粒子初始位置为其中m为粒子数量,一般在20~150之间选取,初始位置要求服从随机分布。针对不同优化对象,则分别有:
[0152]
(1)针对风机电动变桨距电机驱动控制系统实施例1中的负载转矩观测器实施例1,采用反馈增益自动调整方法实施例1进行反馈增益自动调整时,其待优化的参数向量为θ1=[g
max
,g
min
,ε1,ε2,α],此时粒子群算法的搜索空间维度n等于5。
[0153]
(2)针对风机电动变桨距电机驱动控制系统实施例1中的负载转矩观测器实施例1,采用反馈增益自动调整方法实施例2进行反馈增益自动调整时,其待优化的参数向量为
θ2=[g
max
,g
min
,ε,α],此时粒子群算法的搜索空间维度n等于4。
[0154]
(3)针对风机电动变桨距电机驱动控制系统实施例1中的负载转矩观测器实施例2,采用反馈增益自动调整方法实施例1进行反馈增益自动调整时,其待优化的参数向量为θ3=[g
max
,g
min
,ε1,ε2,β],此时粒子群算法的搜索空间维度n等于5。
[0155]
(4)针对风机电动变桨距电机驱动控制系统实施例1中的负载转矩观测器实施例2,采用反馈增益自动调整方法实施例2进行反馈增益自动调整时,其待优化的参数向量为θ4=[g
max
,g
min
,ε,β],此时粒子群算法的搜索空间维度n等于4。
[0156]
步骤201的各实施例中,构造出的粒子中的最优位置后,g
max
按照g
min
按照计算得出;滑模增益kg依据参数α按照式(23)计算得出,比例增益kw依据参数β按照式(24)计算得出。
[0157]
步骤201的各实施例中,各参数向量的位置取值区间为[p
imin p
imax
],范围区间可以根据现有知识或经验给出;例如,参数g
max
的取值区间[p
1min p
1max
]为[-4 4];参数g
min
的取值区间[p
2min p
2max
]为[-4 4];参数ε1的取值区间[p
3min p
3max
]和参数ε2的取值区间[p
4min p
4max
]均为[0 0.05tn],tn为电机的额定转矩;参数ε的取值区间[p
3min p
3max
]为[0 0.05tn];参数α的取值区间[p
5min p
5max
](或[p
4min p
4max
])为[1 5];参数β的取值区间[p
5min p
5max
](或[p
4min p
4max
])为[1 20]。
[0158]
步骤201的各实施例中,由于粒子的初始位置要求服从随机分布,且粒子群的空间搜索算法为线性方式,因此,直接对反馈增益高值g
max
和反馈增益低值g
min
在区间[-5000 0]进行搜索优化时,对观测器工作状态影响很大的反馈增益绝对值低值区间,例如,在区间[-10 0]之间,粒子进入的概率小,较难优化得到反馈增益高值g
max
和反馈增益低值g
min
的最优位置。优化过程中不直接对反馈增益高值g
max
和反馈增益低值g
min
进行搜索优化,而是以类似增益的方式进行优化,将参数区间[-10 0]在搜索区间进行了扩展,较易得到反馈增益高值g
max
和反馈增益低值g
min
的最优位置;此时,反馈增益高值g
max
和反馈增益低值g
min
的参数区间均为[-10000
ꢀ‑
0.0001];反馈增益高值g
max
正常情况下,不会在区间[-0.0001 0]范围内选取,否则会导致观测器响应太慢;另外,区间上限为-0.0001,也能够避免反馈增益高值g
max
取0值所导致的观测器不能正常工作。
[0159]
步骤202,粒子速度和粒子群最优解初始化。将各粒子的初始位置p
(0)
作为各粒子的初始最优值p
b(0)
,按照式(25)计算每个粒子的适应度函数值(即粒子的适应度值)并作为各粒子的最优粒子适应度值保存;对各粒子适应度值进行比较得到初始粒子群最优解p
g(0)
和粒子群最优适应度值并保存。设粒子的初始速度为同样服从随机分布,第i粒子的初始速度则表示为参数的速度变化极值[u
imin u
imax
]一般设为参数取值区间范围的5%~20%;例如,参数g
max
的取值区间[p
1min p
1max
]为[-4 4],区间范围是8,则各粒子第1维变量(参数g
max
)的速度变化极值[u
1min u
1max
]按照5%取值是[-0.4 0.4],按照20%取值是[-1.6 1.6]。
[0160]
步骤203,按照式
[0161]
[0162]
更新各粒子的速度和位置;各维变量的速度变化不能超过各维变量相应的速度变化极值,各维变量的更新位置不能超出各维变量相应的取值区间。式(26)中,n为当前的迭代次数,un和pn是粒子的速度向量和位置;c0为惯性权重,取值范围在0~1.4之间,调整其值可以改变搜索范围和搜索速度,进一步地,随迭代次数增加自适应减小c0值有利于在搜索能力和收敛速度之间取得平衡;c1、c2为学习因子,在1~2之间取值,建议均取等于2;为取值范围在0~1内的随机数;为粒子本身至目前为止找到的最优解(最优位置),表示整个种群到目前为止的粒子群最优解(最优位置)。
[0163]
步骤204,按照式(25)计算每个粒子的粒子适应度值。
[0164]
步骤205,对和相应的最优粒子适应度值进行更新,对和相应的粒子群最优适应度值进行更新。
[0165]
步骤206,判断是否满足循环终止条件,如果是,则结束粒子群算法,最终的粒子群最优解为负载转矩观测器的最优参数;否则,返回步骤203。
[0166]
循环终止条件一般为达到最大迭代步数限制或最优粒子适应值小于某一阈值。采用粒子群算法对负载转矩观测器参数进行整定时,采用最大迭代步数限制方式作为循环终止条件,最大迭代步数通常在100~2000之间选取。同时设置粒子群最优适应度值的阈值条件时,需要同时参考电机额定转矩、期望的转矩观测跟踪调节时间t
p
、转矩观测跟踪超调限值t
δ
、负载转矩观测稳态抖差限值t
δ
、适应度平衡侧重系数γ
p2
等来确定阈值大小;设电机的额定转矩为22n
·
m,t
δ
为2n
·
m,t
δ
为1n
·
m,γ
p2
等于1.5,期望的转矩观测跟踪调节时间t
p
小于0.04s,则粒子群最优适应度值的阈值可以设定在1.8。
[0167]
按照式(25)计算每个粒子的粒子适应度值时,风机电动变桨距电机驱动控制系统实施例1滑模速度控制器的参数已经整定好,且在实现负载转矩补偿控制的情况下进行。要求依次将每个粒子位置转换为相应的负载转矩观测器参数,在电机给定角速度不变,滑模速度控制器处于稳态时,使负载转矩突变,控制电机运行(或者是在电机仿真系统中运行),得到公式(25)中所需的电机负载转矩观测阶跃响应e2(t),依据e2(t)确定过渡过程时间t
p
,计算得到粒子适应度值q2。
[0168]
待优化的负载转矩观测器参数中,g
max
、g
min
之间有约束条件g
min
<g
max
,对应于约束条件g
min
>g
max
。在初始化粒子位置,或者是按照式(26)对粒子位置进行更新时,首先,粒子依据取值区间[p
1min p
1max
]进行位置初始化或者是进行位置更新,然后,粒子依据取值区间进行位置初始化或者是进行位置更新,使每次迭代的每个粒子均满足约束条件g
min
>g
max
,即满足约束条件g
min
<g
max
。
[0169]
在风机电动变桨距电机驱动控制系统实施例1中永磁同步电机速度的周期性控制过程中,将当次k时刻(或者是第k步)计算得到的负载转矩给定值t
l*
记为t
l*
(k),负载转矩观测值记为k-1时刻为k时刻的前一次周期性控制过程时刻,负载转矩给定值t
l*
记为t
l*
(k-1),负载转矩观测值记为k-2时刻为k-1时刻的前一次周期性控制过程时刻,负载转矩给定值t
l*
记为t
l*
(k-2),负载转矩观测值记为记为风机电动变桨距电机驱动控制系统实施例1中永磁同步电机速度控制的步骤包括:
[0170]
步骤一、检测永磁同步电机的转子位置θ、转子角速度ω和三相电流ia、ib和ic;
[0171]
步骤二、依据三相电流ia、ib和ic对永磁同步电机进行clark变换得到在α-β轴坐标系下的电流i
α
、电流i
β
,依据电流i
α
、电流i
β
和转子位置θ进行park变换,得到在d-q轴坐标系下的电流id、电流iq;
[0172]
步骤三、反馈增益g依据负载转矩给定值t
l*
和负载转矩观测值的变化进行调整;
[0173]
步骤四、负载转矩观测器依据转子角速度ω和电流iq对负载转矩进行观测,得到新的负载转矩观测值和转矩电流补偿分量i
″q;
[0174]
步骤五、滑模速度控制器依据输入的转子给定角速度ω
*
和转子角速度ω进行控制计算,得到负载转矩给定值和转矩电流给定分量i
′q;
[0175]
步骤六、依据转矩电流给定分量i
′q和转矩电流补偿分量i
″q计算得到q轴转矩电流给定值i
q*
;d轴电流控制器依据d轴转矩电流给定值i
d*
与d轴坐标系下的电流id之间的差值进行pi控制运算,得到d轴坐标系下的控制电压ud;q轴电流控制器依据q轴转矩电流给定值i
q*
与q轴坐标系下的电流iq之间的差值进行pi控制运算,得到q轴坐标系下的控制电压uq;依据d-q轴坐标系下的控制电压ud、uq进行park逆变换,得到α-β轴坐标系下的控制电压u
α
、u
β
;d轴转矩电流给定值i
d*
等于0;
[0176]
步骤七、将α-β轴坐标系下的控制电压u
α
、u
β
作为svpwm模块的输入,由svpwm模块控制三相逆变器产生三相交流电源ua、ub、uc,从而驱动永磁同步电机运转。
[0177]
上述步骤中,步骤三与步骤四、五的先后顺序可以互换,即可以先进行步骤四、五,后进行步骤三。图2中的(a)和图3中的(a)均按照上述步骤三、四、五顺序先进行反馈增益自动调整,后进行负载转矩观测和速度控制,动调整,后进行负载转矩观测和速度控制,图2中的(b)和图3中的(b)均先进行负载转矩观测和速度控制,后进行反馈增益自动调整,δt
l*
=t
l*
(k)-t
l*
(k-1);上述步骤中,先进行步骤四、五,后进行步骤三。
[0178]
观测得到负载转矩观测值后,将负载转矩的观测值转换成转矩电流补偿分量i
″q前馈补偿至q轴电流pi控制器的输入,对滑模速度控制器输出的转矩电流给定分量i
′q进行补偿。q轴电流pi控制器的q轴转矩电流给定值i
*q
为:
[0179][0180]
式(27)中,kq=1/(1.5pψf)为转矩观测补偿系数。比较式(11)与式(27)可得,当负载发生扰动或者是系统参数发生变化时,式(11)中没有加入负载转矩补偿,需要选取较大的k1、k2值来提供足够大的给定电流变化量来抵消负载发生扰动或者是系统参数发生变化的相关影响,以保证电机转速能够快速恒定;而式(27)将负载转矩观测值前馈补偿至电流调节器中,在不需要较大k1、k2值的情况下就能在负载发生扰动或者是系统参数发生变化时,提供足够大的给定电流变化量来抵消负载发生扰动或者是系统参数发生变化的相关影响,减少滑模速度控制器的输出压力及不连续项的幅值,有效地削弱了系统的抖振。
[0181]
固定反馈增益值时,反馈增益g越小,负载转矩观测的振荡幅值越大,波动性越强;反馈增益g越大,负载转矩观测的振荡幅值越小,观测精度越高。自动调整增益算法解决了
负载转矩观测器中小反馈增益导致转矩观测波动大的问题,大反馈增益收敛时间长的问题,收敛时间和波动幅度指标都优于折中增益算法,能快速跟踪负载转矩变化值以及快速降低给定变化或者参数变化所带来的观测误差,且振荡幅值小,观测精度高,达到了较好的观测效果。
[0182]
在额定负载转矩下改变给定转速时,尽管实际的负载转矩没有改变,但从式(17)、(18)或者式(20)、(21)所构造的负载转矩观测器可知,当转子角速度ω发生改变时,即使负载转矩没有改变,观测到的转矩观测值也会发生变化,造成观测误差。在额定负载转矩下改变给定转速时,永磁同步电机滑模控制系统的控制调节过程是,首先由滑模速度控制器依据给定速度变化,使输出的负载转矩给定值t
l*
改变,使转矩电流给定值i
*q
发生改变,进而使永磁同步电机的电磁转矩te发生改变,带动电机使转子角速度ω发生改变;反馈增益g如果只依据负载转矩观测值的变化量进行自动调整,则此时只有当转子角速度ω发生改变,使负载转矩观测值发生了改变后,才对反馈增益g进行调整;反馈增益g同时依据负载转矩给定值的变化量δt
l*
和负载转矩观测值的变化量进行自动调整,当给定转速改变使负载转矩给定值t
l*
改变,负载转矩观测值还没有发生变化时,就提前调整反馈增益g,当负载转矩观测值真正产生观测误差时,能够加快观测器的响应速度,尽快消除(减小)负载转矩观测值的观测误差,进而改善电机速度控制的快速性与精确性。同样地,当系统模型参数发生变化使负载转矩给定值t
l*
先于负载转矩观测值发生改变时,反馈增益g同时依据负载转矩给定值的变化量δt
l*
和负载转矩观测值的变化量进行自动调整,能够提前调整反馈增益g,加快观测器的响应速度,尽快消除(减小)负载转矩观测值的观测误差,并进一步改善电机速度控制的快速性与精确性。当然,如果负载发生扰动导致观测值发生改变时,发生较大变化时,从图2、图3可知,反馈增益g也能够进行自动调整,以尽快消除(减小)负载转矩观测值的观测误差,使负载转矩观测值尽快跟上负载转矩t
l
的变化。
[0183]
进一步地,风机电动变桨距电机驱动控制系统实施例1中,采用人工或者是优化方式先后整定好滑模速度控制器的参数和负载转矩观测器参数后,还可以在实现负载转矩补偿控制的情况下,对滑模速度控制器的参数进行人工微调,或者是按照步骤101-105采用粒子群算法对滑模速度控制器的参数进行重新优化。
[0184]
图4为实现基于负载转矩观测器的永磁同步电机滑模控制方法的风机电动变桨距电机驱动控制系统实施例2的框图。图4实施例2与图1实施例1的区别在于,速度滑模控制器采用积分滑模控制方式,负载转矩观测器的观测值被送至速度滑模控制器,滑模速度控制器输出的q轴给定电流(转矩电流给定分量)中已经包括有负载转矩观测值的计算项(即补偿分量),因此,实施例2中速度滑模控制器输出的q轴给定电流(转矩电流给定分量)直接作为q轴转矩电流给定值,同样能够起到负载转矩补偿的作用;速度滑模控制器输出的负载转矩给定值t
lδ
中同样已经包括有负载转矩观测值的计算项,负载转矩观测器直接根据负载转矩给定值t
lδ
的变化量进行反馈增益自动调整,其作用与前述反馈增益自动调
整方法实施例2依据最近2次负载转矩给定值的变化量与负载转矩观测值的变化量之和进行反馈增益自动调整相同。
[0185]
定义风机电动变桨距电机驱动控制系统实施例2的状态变量为:
[0186][0187]
选择滑模面函数为:
[0188]
sy=cyy1 y2ꢀꢀꢀꢀꢀꢀꢀꢀ
(29)
[0189]
式(29)中,cy为滑模面参数,且cy>0。式(29)中cy为转子角速度误差积分项的系数,其大小对控制作用的影响主要类似于pid控制中的比例系数,cy的取值同时还兼顾平衡转子角速度误差积分项和转子角速度误差项,通常情况下,cy在大于0且小于100的范围内选取。对式(29)求导可得:
[0190][0191]
在传统指数趋近律的基础上,采用新的趋近律为:
[0192][0193]
μ1、μ2、μ3为速度滑模控制的指数趋近率系数,其中,μ1>0,μ2>0,μ3>0。当电机的转子角速度误差|y2|较大时,计算项变速趋近项趋近速度较大,可加快滑模趋近运动速度;当|y2|较小时,变速趋近项趋近速度较小,可减弱抖振。μ3取值可以参照永磁同步电机稳定运行时转子角速度稳态抖差限值,建议取值不大于该允许稳态抖差限值平方的倒数值,进一步地,在该允许稳态抖差限值平方倒数值的25%至100%的范围内取值;例如,设允许的永磁同步电机转子角速度稳态抖差限值是5rad/s(弧度/秒),其平方倒数值等于0.04,μ3可以在0.01~0.04范围内取值。μ3为变速系数,其大小改变变速快慢。式(31)中的e是自然指数,即自然对数的底数。
[0194]
一般地,系数μ1和系数μ2的取值均小于5000。μ1和μ2分别为变速趋近项系数和指数趋近项系数,由于的值在1附近变化,因此,式(31)中变速趋近项系数μ1和指数趋近项系数μ2可以按照调整传统指数趋近率中等速趋近项系数和指数趋近项系数的方法进行整定。
[0195]
结合式(2)、(3)、(31),得:
[0196][0197]
结合式(31)、(32),将计算得出的q轴给定电流直接作为q轴转矩电流给定值i
δq
,可得控制器输出的q轴转矩电流给定值i
δq
和负载转矩给定值t
lδ
为:
[0198]
[0199]
式(33)中,负载转矩值t
l
使用负载转矩观测器的输出值来代替。定义lyapunov函数为:
[0200][0201]
由式(30)和式(31)可得:
[0202][0203]
式(35)中,μ1>0,μ2>0,sy·
sgn(sy)≥0,故表明观测器的跟踪误差能在有限时间内收敛到零,系统能稳定运行。
[0204]
设计滑模速度控制器时整定参数cy、μ1、μ2、μ3的人工方法是,首先确定μ3的值;令式(33)中的负载转矩观测器的输出值(即不进行负载转矩补偿控制),然后在系统的滑动模态从小到大调整滑模面参数cy和变速趋近项系数μ1的值,直到系统出现明显抖振,此基础上兼顾抑制抖振和系统状态收敛速度,适当减小滑模面参数cy和变速趋近项系数μ1的值;最后,在兼顾抑制滑动模态抖振的情况下,主要依据系统到达段(例如,阶跃响应的电机启动阶段)的快速性来调整指数趋近项系数μ2的值,并对滑模速度控制器的其他参数值进行适当微调。
[0205]
图4风机电动变桨距电机驱动控制系统实施例2中的负载转矩观测器仍然采用前述的负载转矩观测器实施例1,或者是采用前述的负载转矩观测器实施例2;此时,负载转矩观测器根据滑模速度控制器输出的负载转矩给定值的变化对反馈增益g进行调整,依据转子角速度ω和电流iq对负载转矩t
l
进行观测,得到负载转矩观测值
[0206]
图5为反馈增益自动调整方法实施例3流程图,在负载转矩观测器实施例1,或者是负载转矩观测器实施例2用于图4风机电动变桨距电机驱动控制系统实施例2中时,进行反馈增益自动调整。图5中,ε为转矩变化比较阈值,ε>0;g
max
为反馈增益高值,g
min
为反馈增益低值,且g
min
<g
max
<0;δt
lδ
为最近2次负载转矩给定值之间的差值。在一次电机速度的周期性控制过程中,反馈增益g的调整先于滑模速度控制器输出的计算时,图5中的(a)所示反馈增益g依据进行调整和负载转矩观测的具体方法是:
[0207]
步骤㈠、计算
[0208]
步骤㈡、判断是否大于转矩变化比较阈值ε;当大于转矩变化比较阈值ε时,取反馈增益g等于g
min
;当小于等于转矩变化比较阈值ε时,取反馈增益g等于g
max
;
[0209]
步骤㈢、负载转矩观测器对负载转矩t
l
进行观测,得到负载转矩观测值
[0210]
步骤㈣、滑模速度控制器进行控制运算,输出负载转矩给定值此时的为至下一次电机速度的周期性控制过程时,此次输出的负载转矩给定值变为
[0211]
图5中的(b)所示反馈增益g调整方法将上述步骤㈢-㈣变为步骤㈠-㈡,步骤㈠-㈡变为步骤㈢-㈣,
[0212]
因为t
lδ
的输出项中,既包括因系统模型参数、转子角速度给定值、转子角速度实际值变化而处于变化状态的给定分项也包括补偿分项负载转矩观测值项当最近2次负载转矩给定值的变化量|δt
lδ
|大于ε时,表明负载转矩观测值波动大,或者是因系统模型参数变化、转子角速度给定值变化、转子角速度实际值变化,使t
lδ
中的给定分项变化大并将引起负载转矩观测值有较大波动,反馈增益g选择等于g
min
进行转矩辨识与观测;当|δt
lδ
|小于等于ε时,表明负载转矩观测值波动小且将引起负载转矩观测值有较大波动的因素(即t
lδ
中的给定分项)变化小,反馈增益g选择等于g
max
进行转矩辨识与观测。图5中,ε的具体取值与滑模速度控制器的采样控制周期(周期时间)、永磁同步电机及其负载情况相关,ε在大于0,且一般小于额定转矩5%的范围内取值,例如,额定转矩为22n
·
m,可以取ε=0.2n
·
m,或者取ε=0.3n
·
m。反馈增益g的取值满足g
min
<g
max
<0,一般情况下,g
min
≥-5000。g
min
取值应在负载转矩突变时,负载转矩观测器输出观测值的转矩观测跟踪超调量处于转矩观测跟踪超调限值之内;g
max
取值应在负载转矩不变,负载转矩观测器和滑模速度控制器均处于稳态时,最近2次负载转矩给定值之间的差值|δt
lδ
|小于ε;例如,选择反馈增益g
max
=-0.5,g
min
=-10。选取g
min
和g
max
值的具体方法是,首先,在负载转矩不变,负载转矩观测器和滑模速度控制器均处于稳态时,令反馈增益g从一个较大值开始,例如,令反馈增益g从-0.01开始逐渐减小,负载转矩观测的稳态抖差会逐渐增大,当负载转矩观测的稳态抖差增大到负载转矩观测稳态抖差限值时,确定此时的反馈增益g值为g
max
,保持负载转矩不变且令反馈增益g等于g
max
,同时连续进行f1次|δt
lδ
|值的测量,并将f1次测量中最大f2个|δt
lδ
|测量值的平均值作为转矩变化比较阈值ε;然后,当负载转矩观测器和滑模速度控制器均处于稳态时令负载转矩突变,在保证负载转矩观测器输出观测值的转矩观测跟踪超调量处于转矩观测跟踪超调限值之内的前提下,以负载转矩观测器输出观测值的跟踪调节时间尽量短来调节并确定g
min
值。
[0213]
在以上各选取g
min
、g
max
值和比较阈值的具体方法中,均在滑模速度控制器中的参数已经完成整定,且在进行负载转矩补偿控制的情况下实现;人工方法确定参数值时,建议f1为大于等于20的整数,f2为大于等于5且小于等于0.5f1的整数。
[0214]
风机电动变桨距电机驱动控制系统实施例2中,滑模速度控制器和负载转矩观测器的参数还可以在实现负载转矩补偿控制的情况下,采用粒子群算法、狼群算法、遗传算法等优化算法进行整定。采用狼群算法对风机电动变桨距电机驱动控制系统实施例2滑模速度控制器和负载转矩观测器实施例1(或者是负载转矩观测器实施例2)中参数进行整定的具体方法是:
[0215]
系统电机给定转子角速度ω
*
为正弦波信号,如图6中的(a)所示。给定转子角速度ω
*
正弦波信号周期为t
*
,转子角速度最大值不大于电机的额定角速度,转子角速度最小值不小于电机额定角速度的10%,转子角速度最大值与转子角速度最小值之间的差值不小于电机额定角速度的50%。设风机电动变桨距电机驱动控制系统实施例2在带额定负载转矩启动时,至额定转速的启动上升时间为tr,则t
*
在5~10tr中选取。系统电机按照正弦波给定转子角速度ω
*
信号运行时,按照图6中的(b)施加负载转矩t
l
,即,系统电机按照正弦波给定转子角速度ω
*
信号开始运行时,负载转矩为负载转矩低值t
lmin
;
在电机进入转子角速度稳定跟随状态后,负载转矩从低值t
lmin
突变增加至高值t
lmax
;负载转矩维持为高值t
lmax
运行时间t
1*
后,从高值t
lmax
突变减小至低值t
lmin
;其中,负载转矩高值t
lmax
不大于电机的额定负载转矩tn,负载转矩低值t
lmin
不小于电机额定负载转矩的10%,负载转矩高值t
lmax
与负载转矩低值t
lmin
之间的差值不小于电机额定负载转矩的50%;为2~5t
*
之间随机值。系统电机按照正弦波给定转子角速度ω
*
信号运行至少2个周期t
*
后进入转子角速度稳定跟随状态。
[0216]
图7为在电机的转子角速度稳定跟随状态,1个正弦波周期t
*
的给定转子角速度信号和转子角速度响应示意图,其中,曲线
①
为给定转子角速度ω
*
,曲线
②
为转子角速度响应ω,存在抖振。为了清楚地区分ω
*
和ω,图7中给定转子角速度ω
*
和转子角速度响应ω的纵轴坐标比例不同。转子角速度跟踪抖差ωz为转子角速度ω的抖振幅度,跟踪延迟时间τ为转子角速度ω与给定转子角速度ω*之间的延迟时间。图7中,ωo为给定转子角速度正弦信号中线值,ω
z1
为转子角速度响应ω处于最大值状态(峰顶状态)时的转子角速度峰顶跟踪抖差,τ1为转子角速度负穿越跟踪延迟时间,ω
z2
为转子角速度响应ω处于最小值状态(谷底状态)时的转子角速度谷底跟踪抖差,τ2为转子角速度正穿越跟踪延迟时间。连续测量包括负载转矩从低值t
lmin
突变增加至高值t
lmax
至负载转矩从高值t
lmax
突变减小至低值t
lmin
的多个周期(例如,10个或者10个以上t
*
周期)的转子角速度峰顶跟踪抖差ω
z1
、转子角速度谷底跟踪抖差ω
z2
、负穿越跟踪延迟时间τ1、正穿越跟踪延迟时间τ2;转子角速度跟踪抖差ωz为该多个周期ω
z1
和ω
z2
的平均值;跟踪延迟时间τ为该多个周期τ1和τ2的平均值。采用正弦信号作为电机给定转子角速度信号,电机运行时控制负载转矩突变,通过转子角速度跟踪抖差和转子角速度的跟踪延迟时间构造性能指标来同时优化滑模速度控制器和负载转矩观测器的参数,将负载转矩观测器性能好坏的影响统一到转子角速度性能指标,简化了参数优化过程,同时也能最大程度使转子角速度性能指标得到改善。
[0217]
获取转子角速度峰顶跟踪抖差ω
z1
的方法是:将转子角速度在峰顶区2次最大采样值的平均值作为峰顶最大值,该2次最大采样值采样时刻之间的最小采样值作为峰顶最小值;转子角速度峰顶跟踪抖差ω
z1
为该峰顶最大值与峰顶最小值之差的绝对值。获取转子角速度谷底跟踪抖差ω
z2
的方法是:将转子角速度在谷底区2次最小采样值的平均值作为谷底最小值,该2次最小采样值采样时刻之间的最大采样值作为谷底最大值;转子角速度谷底跟踪抖差ω
z2
为该谷底最小值与谷底最大值之差的绝对值。
[0218]
获取负穿越跟踪延迟时间τ1和正穿越跟踪延迟时间τ2的方法是:将转子角速度第一次负穿越的前一采样时刻与转子角速度最后一次负穿越的后一采样时刻的中心点作为转子角速度负穿越时刻;给定转子角速度负穿越时刻和转子角速度负穿越时刻之间时间差的绝对值为负穿越跟踪延迟时间τ1。将转子角速度第一次正穿越的前一采样时刻与转子角速度最后一次正穿越的后一采样时刻的中心点作为转子角速度正穿越时刻;给定转子角速度正穿越时刻和转子角速度正穿越时刻之间时间差的绝对值为正穿越跟踪延迟时间τ2。
[0219]
以负穿越跟踪延迟时间τ1的计算进一步举例说明,图8为在给定转子角速度信号和转子角速度响应信号负穿越示意图。负穿越指的是给定转子角速度正弦信号,以及转子角速度响应信号从大到小穿越给定转子角速度正弦信号中线值线,图8中,ωo所在横线为给定转子角速度正弦信号中线值线;τa为给定转子角速度负穿越时刻。因为抖振,造成在转子角速度的一次负穿越过程中,其实际采样值形成了多次负穿越;图8中,点
①
至
⑩
为转子z2max
]为[0 5000];参数μ2的取值区间[z
3min z
3max
]为[0 5000];参数μ3的取值区间[z
4min z
4max
]为[0.25/ω
δ2 1/ω
δ2
],ω
δ
为转子角速度稳态抖差限值;参数g
max
的取值区间[z
5min z
5max
]为[-4 4];参数g
min
的取值区间[z
6min z
6max
]为[-4 4];参数ε的取值区间[z
7min z
7max
]为[0 0.05tn],tn为电机的额定转矩;参数α的取值区间[z
8min z
8max
]为[1 5],或者是,参数β的取值区间[z
8min z
8max
]为[1 20]。
[0229]
步骤302,游猎竞争。根据式(36)计算狼群中每一匹狼的适应值,适应值越小说明狼所处位置越优,选择位置最优的r1匹狼为竞选狼。r1匹竞选狼根据式(37)展开游猎搜索行为,各竞选狼根据适应值大小竞争头狼,具体是:
[0230]
步骤3021,每一匹竞选狼随机选择h1个方向,根据式(37)沿着每个方向搜索参数前进一步后再退回;根据式(36)计算前进后的适应值,选出所有方向上的最小适应值,若该最小适应值小于该匹竞选狼原位置的适应值,则将该匹竞选狼原位置替换为该最小适应值所处位置;
[0231]
步骤3022,每一匹竞选狼重复h2次步骤3021;
[0232]
步骤3023,所有r1匹竞选狼完成步骤3022后,选择位置最优的竞选狼为头狼。
[0233][0234]
式(37)中,i=1,2,
…
,r1;j=1,2,
…
,8;rand(-1,1)是均匀分布在[-1 1]内的随机数;l=1,2,
…
,h1;stepa是游猎步长,建议stepa的取值范围是[0.1 0.9];zi=[z
i1 z
i2
…zi8
]是第i匹竞选狼的位置。r1建议在区间[0.1m 0.25m]中取固定值或者是随机值;方向数量h1建议在区间[3 8]取值,重复次数h2建议在区间[3 10]取值。
[0235]
步骤303,召唤奔袭。竞选狼之外的其它狼匹根据式(38)展开奔袭搜索行为,向头狼奔袭。第i匹狼根据式(36)计算新位置的适应值,当第i匹狼搜索到的新位置优于自身的目前位置时,对其位置加以变更,否则保持不变;若第i匹狼搜索到的新位置优于头狼位置,则该第i匹狼转换为头狼并重新发起召唤奔袭。
[0236]z′
ij
=z
ij
rand(-1,1)
·
stepb
·
(z
bj-z
ij
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(38)
[0237]
式(38)中,i=1,2,
…
,m-r1;j=1,2,
…
,8;z
′i=[z
′
i1 z
′
i2
…z′
i8
]表示第i匹狼搜索更新的位置;zi=[z
i1 z
i2
…zi8
]表示第i匹狼的当前位置;zb=[z
b1 z
b2
…zb8
]表示当前的头狼位置;stepb是奔袭步长,建议stepb的取值范围是[1.3 2.5]。
[0238]
步骤304,围攻猎物。在头狼的召唤下,其它狼匹按式(39)对猎物展开围攻。第i匹狼根据式(36)计算新位置的适应值,当第i匹狼围攻过程中搜索到的新位置优于当前位置时,对该匹狼的位置加以变更,否则保持不变;若第i匹狼围攻搜索到的新位置优于头狼位置,则该第i匹狼转换为头狼。
[0239][0240]
式(39)中,i=1,2,
…
,m-1;j=1,2,
…
,8;表示第i匹狼的当前位置(即经过n次迭代时的位置),表示第i匹狼的围攻更新位置;zb=[z
b1 z
b2
…zb8
]表示当前的头狼位置;δ为预先设立的阈值,建议δ的取值范围为[0.1 0.4];stepc是围攻步长,按照式(40)进行计算。
[0241][0242]
式(40)中,n为当前的迭代次数,n
max
为设定的最大迭代次数;stepc
max
、stepc
min
分别为设定的最大围攻步长、最小围攻步长。建议stepc
min
的取值范围是[0.3 1.3],stepc
max
的取值是stepc
min
的5至100倍。z
jmax
和z
jmin
分别为第j维参数取值区间的最大值和最小值。式(40)中的e是自然指数,即自然对数的底数。
[0243]
步骤305,终止条件判断。若循环迭代次数达到,或者是头狼适应值小于某一阈值,则终止优化过程,头狼位置参数为最优参数;否则令n=n 1,转向步骤306。
[0244]
步骤306,竞争更新。根据优胜劣汰原则,随机产生r2匹狼替代狼群中r2匹适应值最差的狼,竞争更新狼群,转向步骤302。r2建议在区间[0.05m 0.15m]中取固定值或者是随机值。
[0245]
在以上各步骤中,随机产生个体狼的新位置,或者是个体狼搜索产生新位置时,每一匹狼新位置的各维变量不能超出变量相应的取值区间。待优化的参数中,g
max
、g
min
之间有约束条件g
min
<g
max
,对应于约束条件g
min
>g
max
。在随机产生个体狼的新位置,或者是个体狼搜索产生新位置时,首先,个体狼zi中的参数z
i5
依据取值区间[z
5min z
5max
]随机生成位置或者是进行位置更新,然后,个体狼zi的参数z
i6
依据取值区间[z
i5 z
6max
]随机生成位置或者是进行位置更新,使个体狼zi满足约束条件g
min
>g
max
,即满足约束条件g
min
<g
max
。
[0246]
步骤305中,终止条件采用最大迭代步数限制方式,最大迭代次数n
max
建议在区间[20 500]中取固定值。同时设置头狼适应值小于某一阈值的条件时,阈值条件需要对速度控制的快速性和稳定性进行综合考虑。例如,转子角速度稳态抖差限值ω
δ
为1.5rad/s,电机的启动上升时间tr为0.1s,γz取值为15时,终止条件的阈值可以选择1.5。
[0247]
在以上各步骤中,根据式(36)计算新位置的适应值时,要求依次将个体狼匹位置转换为相应的滑模速度控制器参数和负载转矩观测器参数,控制电机运行(或者是仿真系统中运行),在系统电机给定转子角速度ω
*
为正弦波信号,负载转矩t
l
在转子角速度稳定跟随状态突变情况下,得到电机的速度响应,并依据该速度响应确定转子角速度跟踪抖差ωz和跟踪延迟时间τ,再依据式(36)计算得到适应值。
[0248]
在风机电动变桨距电机驱动控制系统实施例2中永磁同步电机速度的周期性控制过程中,将当次k时刻(或者是第k步)计算得到的负载转矩给定值记为负载转矩观测值记为k-1时刻为k时刻的前一次周期性控制过程时刻,负载转矩给定值记为k-2时刻为k-1时刻的前一次周期性控制过程时刻,负载转矩给定值记为按照图5中的(a)进行反馈增益g调整时,永磁同步电机速度的周期性控制过程包括以下步骤:
[0249]
步骤一、检测永磁同步电机的转子位置θ、转子角速度ω和三相电流ia、ib和ic;
[0250]
步骤二、依据三相电流ia、ib和ic对永磁同步电机进行clark变换得到在α-β轴坐标系下的电流i
α
、i
β
,依据电流i
α
、i
β
和转子位置θ进行park变换,得到在d-q轴坐标系下的电流id、iq;
[0251]
步骤三、反馈增益g依据负载转矩给定值的变化进行调整;
[0252]
步骤四、负载转矩观测器对负载转矩进行观测,得到负载转矩观测值
[0253]
步骤五、滑模速度控制器进行控制计算,得到负载转矩给定值和q轴转矩电流给定值
[0254]
步骤六、d轴电流控制器依据d轴转矩电流给定值i
d*
与d轴坐标系下的电流id之间的差值进行pi控制运算,得到d轴坐标系下的控制电压ud;q轴电流控制器依据q轴转矩电流给定值与q轴坐标系下的电流iq之间的差值进行pi控制运算,得到q轴坐标系下的控制电压uq;依据d-q轴坐标系下的控制电压ud、uq进行park逆变换,得到α-β轴坐标系下的控制电压u
α
、u
β
;
[0255]
步骤七、将α-β轴坐标系下的控制电压u
α
、u
β
作为svpwm模块的输入,由svpwm模块控制三相逆变器产生三相交流电源ua、ub、uc,从而驱动永磁同步电机运转。
[0256]
按照图5中的(b)进行反馈增益g调整时,上述控制过程的步骤中,步骤四、五的内容先进行,步骤三的内容后进行。
[0257]
式(33)滑模速度控制器的输出项中包括补偿分项负载转矩观测值相当于式(27)中将负载转矩观测值前馈至电流调节器中,能在负载发生扰动或者是系统参数发生变化时,提供足够大的给定电流变化量来抵消负载发生扰动或者是系统参数发生变化的相关影响,有效地削弱了系统的抖振。反馈增益g依据负载转矩给定值的变化量δt
lδ
进行自动调整,当给定转速改变使负载转矩给定值t
lδ
改变,负载转矩观测值还没有发生变化时,就提前调整反馈增益g,当负载转矩观测值真正产生观测误差时,能够加快观测器响应速度,尽快消除(减小)负载转矩观测值的观测误差,进而改善电机速度控制的快速性与精确性。同样地,当系统参数发生变化使负载转矩给定值t
lδ
先于负载转矩观测值发生改变时,反馈增益g依据负载转矩给定值的变化量δt
lδ
进行自动调整,能够提前调整反馈增益g,加快观测器响应速度,尽快消除(减小)负载转矩观测值的观测误差,并进一步改善电机速度控制的快速性与精确性。当然,如果在负载发生扰动导致发生改变时,δt
lδ
同样会发生改变,反馈增益g依据负载转矩给定值的变化量δt
lδ
进行自动调整,能够尽快消除(减小)负载转矩观测值的观测误差,使负载转矩观测值尽快跟上负载转矩t
l
的变化。
[0258]
速度滑模控制器采用积分滑模控制方式的风机电动变桨距电机驱动控制系统实施例2,其反馈增益依据负载转矩给定值t
lδ
的变化量进行自动调整的算法,作用与风机电动变桨距电机驱动控制系统实施例1中,反馈增益依据最近2次负载转矩给定值的变化量与负载转矩观测值的变化量之和进行自动调整的算法相同,避免了负载转矩观测器选择固定小反馈增益导致转矩观测波动大,选择固定大反馈增益导致收敛时间长的问题,能在系统的控制参数、模型参数等发生变化或者是负载发生扰动,导致负载转矩给定值t
lδ
发生变化(包括给定分项发生变化或/和补偿分项发生变化)时,快速降低负载转矩的观测误差,改善了观测效果和电机速度控制的快速性与精确性。反馈增益g依据负载转矩给定值变化t
lδ
进行自动调整,能够在负载转矩观测值还没有发生较大变化,但因转子角速度给定值变化或/和转子角速度实际值变化使负载转矩给定值的给定分项发生变化,或者
是系统模型参数发生变化使负载转矩给定值的给定分项发生变化,将引起负载转矩观测值有较大波动时,提前调整反馈增益g,当负载转矩观测值真正产生观测误差时,加快观测器的响应速度,快速降低负载转矩观测值的观测误差,并进一步改善电机速度控制的快速性与精确性。
[0259]
在以上的各实施例中,转矩观测跟踪超调限值通常为电机额定转矩的1%~10%,具体来说,转矩观测跟踪超调限值是额定转矩的2%,或者是额定转矩的5%,或者是额定转矩的10%,等等。负载转矩从一个定值突变至另外一个定值,突变开始时刻至负载转矩观测器输出观测值稳定地进入负载转矩观测稳态抖差限值范围时刻为转矩观测过渡过程,跟踪调节时间指的是该过渡过程时间。负载转矩观测稳态抖差指的是负载转矩不变且负载转矩观测器处于稳态时观测转矩瞬时值与负载转矩之间的误差,该误差包括滑模观测器自身抖振引起的观测误差和负载波动之外干扰原因所造成的观测误差,或者是状态观测器因为转子角速度抖振引起的观测误差和负载波动之外干扰原因所造成的观测误差;负载转矩观测稳态抖差限值是负载转矩观测器允许的负载转矩观测稳态抖差最大绝对值;负载转矩观测稳态抖差限值通常与系统允许的负载转矩观测稳态误差最大值相同;负载转矩观测稳态抖差限值通常为电机额定转矩的1%~5%,具体来说,负载转矩观测稳态抖差限值是额定转矩的1%,或者是额定转矩的2%,或者是额定转矩的5%,等等。转矩观测跟踪超调量指的是负载转矩从一个定值突变至另外一个定值,负载转矩观测器输出的观测值超过突变后负载转矩的最大偏差值。当负载转矩观测的稳态抖差在负载转矩观测稳态抖差限值的临近范围之内,例如,95%~105%范围内,或者是98%~102%范围内时,认为负载转矩观测的稳态抖差增大到负载转矩观测稳态抖差限值。滑模速度控制器处于稳态指的是滑模速度控制器稳定地处于滑动模态;转子角速度稳态抖差指的是稳态时电机转子角速度瞬时值与稳态值之间的差值,转子角速度稳态抖差限值为系统允许的转子角速度稳态抖差最大绝对值。负载转矩观测器中,实施例1的滑模观测器处于稳态指的是滑模观测器稳定地处于滑动模态;实施例2的状态观测器处于稳态指的是状态观测器经过转矩观测过渡过程之后的工作状态。转子角速度稳态抖差指的是稳态时电机转子角速度瞬时值与稳态值之间的差值,转子角速度稳态抖差限值为系统允许的转子角速度稳态抖差最大绝对值;转子角速度稳态抖差限值通常与系统允许的转子角速度稳态误差最大值相同。
[0260]
本发明中,风机电动变桨距电机驱动控制方法的变桨距电机为永磁同步电机,风机电动变桨距电机驱动控制系统为永磁同步电机速度控制系统。本发明所提供的永磁同步电机速度控制系统及永磁同步电机速度控制方法,除用于风机电动变桨距驱动控制之外,还可以用于其他永磁同步电机应用场合。
[0261]
除说明书所述的技术特征外,本发明所涉及的其他技术均为本领域技术人员所掌握的常规技术。例如,q轴电流控制器、d轴电流控制器采用pi控制器进行控制及控制器参数的选择,滑模速度控制器控制参数的选择,位置与速度检测模块使用旋转变压器或光电编码器等进行永磁同步电机转子旋转角度与旋转速度检测,以及对于clarke变换模块、park变换模块、park逆变换模块和svpwm模块、三相逆变器的变换方法及应用方法,等等,均为本领域技术人员所掌握的常规技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。