技术特征:
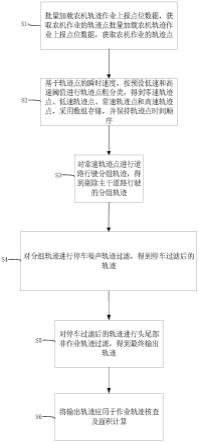
1.一种北斗农机作业轨迹快速过滤分组方法,其特征在于:包括以下步骤:s1:批量加载农机轨迹作业上报点位数据,获取农机作业的轨迹点;s2:基于轨迹点的瞬时速度,按预设低速和高速阈值进行轨迹点粗分类,得到零速轨迹点、低速轨迹点、常速轨迹点和高速轨迹点,采用数组存储,并保持轨迹点时间顺序;s3:对常速轨迹点进行道路行驶分组轨迹,得到剔除主干道路行驶的分组轨迹;s4:对分组轨迹进行停车噪声轨迹过滤,得到停车过滤后的轨迹;s5:对停车过滤后的轨迹进行头尾部非作业轨迹过滤,得到最终输出轨迹;s6:将输出轨迹应用于作业轨迹核查及面积计算。2.如权利要求1所述的一种北斗农机作业轨迹快速过滤分组方法,其特征在于:步骤s3中,所述道路行驶分组轨迹,依次采用三种分组方式,分别为:基于相邻点距离分组、基于时间间隔阈值分组和基于轨迹点周边点数量阈值分组。3.如权利要求1所述的一种北斗农机作业轨迹快速过滤分组方法,其特征在于:步骤s4中,所述停车噪声轨迹过滤,采用轨迹平均方向变化值和轨迹内零速点数量两个指标形成组合判断,对停车噪声轨迹进行过滤。4.如权利要求1所述的一种北斗农机作业轨迹快速过滤分组方法,其特征在于:步骤s5中,所述头尾部非作业轨迹过滤,采用停车过滤后的轨迹点周边点数量的法线段与自轨迹线交点数量作为阈值判断,对头尾部非作业轨迹进行过滤。5.如权利要求2所述的一种北斗农机作业轨迹快速过滤分组方法,其特征在于:所述基于相邻点距离分组具体如下:s311:计算常速轨迹点p
n
的经纬度坐标(lon
n
,lat
n
),取第一个点的经度lon1作为计算的中央经线,依次计算各轨迹点p
n
的高斯平面投影坐标(x
n
,y
n
);s312:设置同组内相邻点的最大空间距离为d
max
,通过轨迹点p
n
的投影坐标计算轨迹下相邻点n的空间距离d
n
;s313:若d
n
<d
max
,则将轨迹点p
n
与前一轨迹点p
n-1
归为一组,否则,以轨迹点p
n
为首,新建一组,直至所有的轨迹点遍历完毕,得到最终分组轨迹。6.如权利要求5所述的一种北斗农机作业轨迹快速过滤分组方法,其特征在于:所述基于时间间隔阈值分组,具体如下:s321:设置同组内相邻点的最大时间间隔为δt
max
,计算轨迹相邻点pn-1与pn之间的时间间隔δt
n
;s312:若δt
n
<δt
max
,则将轨迹点p
n
与前一轨迹点p
n-1
归为一组,否则,以轨迹点p
n
为首,新建一组,直至所有的轨迹点遍历完毕,得到最终分组轨迹。7.如权利要求5所述的一种北斗农机作业轨迹快速过滤分组方法,其特征在于:所述基于轨迹点周边点数量阈值分组,具体如下:s331:设置以轨迹点p
n
(x
n
,y
n
)为中心,获取缓冲半径为d
buffer
的圆o
n
,并求得该圆的外包矩形r
n
,统计该分组轨迹内,包含在矩形r
n
内的轨迹点数量s332:设置周边点数量分割阈值为若则将轨迹点p
n
与前一轨迹点p
n-1
归为一组,否则,以轨迹点p
n
为首,新建一组,直至所有的轨迹点遍历完毕,得到最终分组轨迹。
8.如权利要求3所述的一种北斗农机作业轨迹快速过滤分组方法,其特征在于:所述轨迹平均方向变化值计算过程如下:s411:将分组轨迹g
i
内轨迹点p
n
(x
n
,y
n
)和轨迹点p
n 1
(x
n 1
,y
n 1
),计算线段p
n
p
n 1
的方向角α
n
,α
n
属于[0~2π],计算线段p
n
p
n 1
和p
n 1
p
n 2
的方向变化角δα
n
;s412:轨迹线最后一个点的方向变化值δα
end
,直接赋值为倒数第二个点的方向变化值δα
end-1
;s413:计算该组g
i
平均方向变化值所述轨迹内零速点数量计算过程如下:s421:获取分组轨迹g
i
内第一个轨迹点p1的时间t1,以及最后一个轨迹点p
end
的时间t
end
;s422:遍历零速点组g
zero
中的点p
n
,获取其时间t
n
;s423:当条件t
n
≥t1且t
n
≤t
end
时,分组g
i
的零速点数量z
i
自增1;s424:当条件t
n
>t
end
时,针对分组g
i
的零速点组g
zero
遍历结束;此时获得分组g
i
的零速点数量为z
i
。9.如权利要求8所述的一种北斗农机作业轨迹快速过滤分组方法,其特征在于:轨迹平均方向变化值和轨迹内零速点数量两个指标形成组合判断,具体为:分组轨迹g
i
的平均方向变化值且该分组的零点数量z
i
>z
threshold1
,则分组轨迹g
i
加入停车噪声轨迹集合{g
noise
};分组轨迹g
i
的平均方向变化值且该分组的零点数量z
i
>z
threshold2
,则分组轨迹g
i
加入停车噪声轨迹集合{g
noise
};分组轨迹g
i
的平均方向变化值且该分组的零点数量z
i
>z
threshold3
,则分组轨迹g
i
加入停车噪声轨迹集合{g
noise
};其中,δα
threshold1
>δα
threshold
2>δα
threshold3
,z
threshold1
>z
threshold2
>z
threshold3
且阈值参数均为预设值。10.如权利要求3所述的一种北斗农机作业轨迹快速过滤分组方法,其特征在于:步骤s5进行头尾部非作业轨迹过滤,具体过程为:s51:分组轨迹g
i
中,设置以轨迹点p
n
(x
n
,y
n
)为中心,获取缓冲半径为d
buffer
的圆o
n
,并求得该圆的外包矩形r
n
,统计该分组轨迹内,包含在矩形r
n
内的轨迹点数量s52:分组轨迹g
i
中,利用所有的轨迹点p1~p
end
,构建轨迹的多段线polyline
i
;s53:计算轨迹g
i
中各轨迹点的法线段与轨迹线polyline
i
的交点数量;s54:根据交点数量过滤头部非作业轨迹;s55:根据交点数量过滤尾部非作业轨迹,输出最终作业轨迹。
技术总结
本发明涉及一种北斗农机作业轨迹快速过滤分组方法,方法包括以下步骤:批量加载农机轨迹作业上报点位数据,获取农机作业的轨迹点;基于轨迹点的瞬时速度,按阈值进行分类,得到零速轨迹点、低速轨迹点、常速轨迹点和高速轨迹点;对常速轨迹点进行道路行驶分组轨迹,得到剔除主干道路行驶的分组轨迹;对分组轨迹进行停车噪声轨迹过滤,得到停车过滤后的轨迹;对停车过滤后的轨迹进行头尾部非作业轨迹过滤,得到最终输出轨迹;将输出轨迹应用于作业轨迹核查及面积计算。本发明有益效果是:仅利用轨迹点瞬时速度、基本的数量统计和矩形空间范围判断,以及非常少量的线段相交计算,可以快速实现复杂轨迹的快速过滤分组。以快速实现复杂轨迹的快速过滤分组。以快速实现复杂轨迹的快速过滤分组。
技术研发人员:曹威 郭明强 朱建军 张敏 李兵 钟静 匡明星
受保护的技术使用者:湖北地信科技集团股份有限公司
技术研发日:2022.09.02
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。