基于多策略改进的人工蜂群算法的光伏mppt控制方法
技术领域
1.本发明涉及光伏发电控制技术领域,具体涉及一种基于多策略改进的人工蜂群算法的光伏mppt控制方法。
背景技术:
2.太阳能由于其绿色、分布广、资源充足的特点被广泛应用于发电领域,光伏装机容量在中国能源结构中所占比例日益增加,进一步提高光伏发电效率是构建高效绿色能源网络的一个重要方向,因此需要对光伏发电系统进行最大功率点跟踪(maximum power point tracking,mppt)。
3.但是基于扰动观察法、电导增量法的传统mppt控制技术只有在光伏阵列处于均匀光照环境下才能成功跟踪到最大功率点,且受到扰动步长的影响,输出功率有较大的波动差值。实际生活中,光伏阵列所受光照常被云朵、建筑、灰尘、落叶等遮挡,导致其输出功率-电压曲线呈现多峰特性,传统mppt控制方法大多无法跟踪到全局最大功率点,导致光伏阵列发电效率降低。
4.因此,诸多学者将粒子群算法、遗传算法、蚁群算法等群体智能算法应用于光伏mppt控制技术中,以实现多峰条件下的最大功率点跟踪。虽然取得了一定的效果,但是缺乏对跟踪精度、跟踪速度以及稳态性能的统筹兼顾,综合性能较低。
技术实现要素:
5.针对现有最大功率追踪技术的不足,提供一种基于多策略融合的人工蜂群算法(multi-strategy fusion abc algorithm,msfabc)的光伏mppt控制方法,以实现快速、准确、稳定的跟踪全局最大功率点。
6.本发明采取的技术方案为:
7.基于多策略改进的人工蜂群算法的光伏mppt控制方法,包括以下步骤:
8.步骤1:在不影响仿真精度的情况下,对光伏电池等效电路数学模型简化,得到光伏电池数学模型,搭建光伏阵列模型;
9.步骤2:搭建基于多策略改进的人工蜂群算法的光伏mppt控制模块、升压电路模块与pwm发生器模块,组成光伏发电mppt控制系统模型;
10.步骤3:光伏mppt控制模块采集光伏阵列的输出电压与电流,通过多策略改进的人工蜂群算法进行实时搜索,找到最大输出功率点对应的最优占空比;
11.步骤4:基于多策略改进的人工蜂群算法的光伏mppt控制模块输出搜索到的最优占空比,通过pwm发生器模块生成相应脉冲信号,驱动升压电路模块,使光伏发电系统输出最大功率;
12.步骤5:判断环境是否发生变化,若是,返回步骤2,重启算法;若否,保持步骤3保存最大输出功率。
13.所述步骤1中,光伏电池等效电路数学模型表达式为:
[0014][0015]
式中,i
sc
为光生电流;id为流过二极管vd的电流;i0为二极管反向饱和电流;q为电子电荷常数(1.6
×
10-19
c);v为负载端电压;i
l
为负载工作电流;a为二极管品质因数;rs为等效串联电阻;r
sh
为等效并联电阻;i
rsh
为流过等效并联电阻的电流;k为玻尔兹曼常数(1.38
×
10-23
j/k);t为光伏电池温度;
[0016]
考虑到其中r
sh
、a、rs、i0参数的值与温度和光照等外界环境有关,难以确定,不便于工程应用,且对光伏电池数学模型精准度影响较低。对光伏电池等效电路数学模型做出如下两点简化:
[0017]
①
:通常情况下项的值远小于光生电流,因此忽略该项;
[0018]
②
:通常情况下rs远小于二极管正向导通电阻,设定i
l
=i
sc
;
[0019]
并且定义如下情况:
[0020]
a、开路状态下:i
l
=0,v=v
oc
;
[0021]
b、最大功率点处:v=vm,i
l
=im;
[0022]
此时,光伏电池等效电路数学模型可简化为:
[0023][0024]
式中,im为最佳工作电流电流,vm为最佳工作电压,v
oc
为开路电压。
[0025]
因此,只需要i
sc
、v
oc
、im和vm四个参数,就能以较高精度复现光伏电池的特性。
[0026]
所述步骤2中,图3为光伏mppt控制模块、升压电路模块、pwm发生器模块组成的光伏发电mppt控制系统模型图。
[0027]
光伏mppt控制模块,用于搜索最大输出功率所对应的最优占空比;
[0028]
升压电路模块一方面可以升高光伏阵列输出电压,另一方面能够配合mppt控制器实现最大输出功率的追踪;
[0029]
pwm发生器模块,生成与最优占空比相应的脉冲信号驱动升压电路模块;
[0030]
上述模块与光伏阵列共同组成光伏发电mppt控制系统模型,以实现最大功率输出。所述步骤3中,多策略改进的人工蜂群算法搜索最大功率点所对应占空比,包括如下步骤:
[0031]
s3.1、定义参数:蜜源位置代表控制升压电路模块电压的占空比;蜜源花蜜量即为光伏阵列输出的功率p;算法搜索到的最优蜜源为花蜜量最多的蜜源,即为光伏阵列输出最大功率时控制升压电路模块电压的最优占空比。
[0032]
s3.2、初始化基本参数:设置蜜源数目sn,蜜源空间维度d,迭代次数t
max
;
[0033]
s3.3、更新枯竭参数阈值limit:
[0034]
蜜源空间维数与蜜源数量共同决定了limit的取值,具体表达式如下:
[0035]
limit=sn
×
d;
[0036]
s3.4、初始化蜜源位置:
[0037]
采用均匀化与随机化相结合的初始化策略:首先将蜜源x
ij
中第j维度区间均匀划分为与蜜源数sn相同的子区间,初始化操作时首先选定子区间,然后在子区间内随机生成初始蜜源,均匀化与随机化相结合的初始化表达式如下:
[0038][0039]
式中,i=1,2,
…
,sn,sn为蜜源(雇佣峰、跟随蜂)的数目;j=1,2,
…
,d,d为蜜源空间的维数;α
ij
为(0,1)间的随机值;和分别为第j维分量的最小值和最大值。
[0040]
s3.5、计算初始蜜源花蜜量,选择出花蜜量最多的蜜源,将其设置为精英个体gbest s3.6、更新权重因子ω(t):
[0041]
ω(t)为随着迭代次数t非线性变化的权重因子,ω(t)的数学表达式为:
[0042][0043]
式中,ω
max
和ω
min
分别为惯性权重ω的最大值0.9与最小值0.1,t为当前搜索次数,t
max
为最大搜索次数。
[0044]
由上式可知,在搜索初期,精英个体质量较低,自适应权重因子会降低精英个体对候选解的影响,随着迭代次数的增加,精英个体质量不断提高,自适应权重因子会逐渐提高精英个体对候选解的影响,从而提高算法的收敛速度和跟踪精度。
[0045]
s3.7、雇佣蜂搜索:
[0046]
每只雇佣蜂均拥有一个相对于的蜜源,雇佣蜂采用精英个体引导和非线性权重因子协同搜索策略,搜索新蜜源,数学表达式如下:
[0047]
x
ij
'=x
ij
ω(t)(x
ij-x
kj
) (1-ω(t))(gbest-x
ij
);
[0048]
式中,x
ij
'为新蜜源位置,x
kj
为随机选择的蜜源,k=1,2
…
,sn,且k≠i,gbest为精英个体。
[0049]
s3.8、雇佣蜂对搜索到的新蜜源与原有旧蜜源进行贪婪选择,保留花蜜较多的蜜源,贪婪选择的数学表达式为:
[0050][0051]
式中,fit(x
ij
')、fit(x
ij
)分别表示新旧蜜源的花蜜量,v
ij
为贪婪选择后的优质蜜源。
[0052]
s3.9、跟随蜂根据蜜源信息,通过轮盘赌策略概率选择某个雇佣蜂跟随,每个雇佣蜂被选中的概率为:
[0053][0054]
式中,p
ij
表示第ij个雇佣蜂被选中的概率;由上式可知,花蜜量越多的蜜源越容易被选择。
[0055]
s3.10、跟随蜂选定跟随的雇佣蜂之后,在其对应蜜源附近进行邻域搜索,寻找新蜜源,进行贪婪选择,若新蜜源花蜜量更多,则跟随蜂与雇佣蜂互换身份。邻域搜索的表达式为:
[0056]
x
ij
'=x
ij
ω(t)(x
ij-x
kj
) (1-ω(t))(gbest-x
ij
);
[0057]
s3.11、根据搜索次数更新变异概率p:
[0058]
变异概率p对群体多样性和收敛速度有较大的影响,p值越大,则种群多样性越大,算法全局搜索能力越强,但是会导致收敛速度变慢;反之,p值越小,则收敛速度越快,但不能有效帮助算法跳出局部最优。因此,p值更新公式设置为:
[0059][0060]
s3.12、为避免陷入局部最优,雇佣蜂与跟随蜂搜索完成后,以一定的概率p发生随机变异,具体表达式如下:
[0061][0062]
式中,α为(0,1)之间的随机数,为(-1,1)间的随机数。
[0063]
s3.13、侦查蜂搜索:
[0064]
某一蜜源超过limit次未得到更新,便会被放弃。此时,侦查蜂对被放弃的蜜源进行重新初始化,避免算法陷入局部最优,避免算法早熟收敛。但该机制也存在一定的弊端,若在算法搜索过程中,某个蜜源为当前全局最优蜜源,却因为枯竭参数limit过高而被放弃,会导致优势蜜源丢失,针对此问题,在雇佣蜂生成侦查蜂过程中引入定向变异操作,在生成随机侦查蜂的同时,生成一只孪生侦查蜂,总是位于当前枯竭蜜源邻域内,这种定向变异能够避免最优蜜源的搜索经验丢失,同时对最优蜜源进行一次邻域搜索,提高算法的搜索效率。执行定向变异操作的侦查蜂搜索公式为:
[0065][0066]
式中,trail
ij
为第ij个蜜源未被更新的次数,η为邻域扰动因子,η∈(-0.05,0.05),α
ij
为(0,1)间的随机值,为生成的孪生侦查蜂,limit为枯竭参数。
[0067]
s3.14、终止条件判断:当雇佣蜂找到的蜜源位置十分接近时,即蜜源对应占空比数值之差小于0.005时,则认为已经找到最大输出功率对应的占空比,数学表达式如下:
[0068]
|x
ij-x
kj
|《0.005。
[0069]
所述步骤4中,通过pwm发生器模块,将最优占空比生成相应脉冲信号驱动升压电路模块,改变外部电路等效阻抗r
eq
,与光伏阵列内部阻抗一致时,使光伏发电系统输出最大功率。外部电路等效阻抗r
eq
与占空比α的关系由下式所示:
[0070]req
=r
l
×
(1-α)2[0071]
式中:r
l
为外部电路负载。
[0072]
所述步骤5中,判断环境变化的依据为:
[0073]
当环境变化后,光伏阵列输出功率会发生变化,导致最大输出功率丢失,需要重启算法,通过检测输出功率变化率δp来实现,故算法重启条件设置为:
[0074][0075]
式中,p
t
表示t时刻光伏阵列输出功率,p
max
代表追踪到的最大功率,此处δp=0.05。本发明一种基于多策略改进的人工蜂群算法的光伏mppt控制方法,技术效果如下:
[0076]
1)本发明通过均匀化与随机化相结合的初始化策略,生成多样性的初始蜜源,为后续搜索奠定基础,采用精英个体引导和自适应权重因子调节的协同搜索策略寻找最优占空比,有效平衡了全局与局部搜索能力,减少了搜索时间,提高了搜索精度。雇佣蜂,跟随蜂与侦查蜂的随机-定向双变异策略有效帮助算法逃逸局部最优值。
[0077]
将以上策略与算法有机结合,提高了算法的整体性能。
[0078]
2)在静态与动态环境下,本发明提供的基于多策略融合的人工蜂群算法的mppt方法,对于静态和动态阴影环境下光伏阵列的最大功率追踪问题,能够保证较高跟踪精度的同时具有更快的跟踪速度以及较少的功率波动。
附图说明
[0079]
图1为光伏电池等效电路图。
[0080]
图2(a)为光伏阵列输出电流-电压特性曲线图;
[0081]
图2(b)为光伏阵列输出功率-电压特性曲线图。
[0082]
图3为光伏发电mppt控制系统模型图。
[0083]
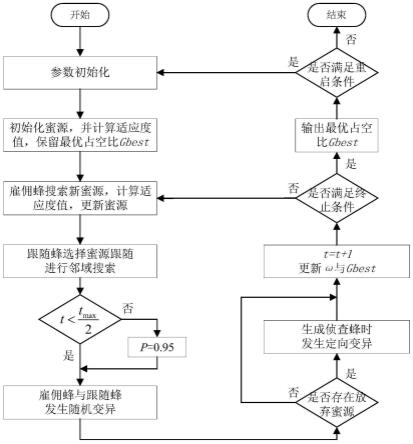
图4为基于msfabc算法的mppt控制方法流程图。
[0084]
图5(a)为静态环境下msfabc算法mppt效果图(工况1);
[0085]
图5(b)为静态环境下msfabc算法mppt效果图(工况2);
[0086]
图5(c)为静态环境下msfabc算法mppt效果图(工况3);
[0087]
图5(d)为静态环境下msfabc算法mppt效果图(工况4)。
[0088]
图6(a)为动态环境下(局部遮阴)msfabc算法mppt效果图;
[0089]
图6(b)为动态环境下(遮阴消失)msfabc算法mppt效果图。
具体实施方式
[0090]
基于多策略改进的人工蜂群算法的光伏mppt控制方法,该方法基于多策略融合的人工蜂群算法,实现光伏阵列在静态和动态环境下的最大功率追踪。首先,对图1所示光伏电池等效电路做出简化,得到工程用数学模型,然后搭建图3所示的光伏发电mppt控制系统。基于多策略融合的人工蜂群算法的mppt控制模块,实时采集光伏阵列的输出电压与电流,通过多策融合的人工蜂群算法寻找到最大输出功率对应的占空比,并将其输出至pwm发生器中,生成对应的脉冲信号驱动升压电路改变光伏阵列输出电压,达到输出最大功率的目的。
[0091]
步骤1:在不影响仿真精度的情况下,对光伏电池等效电路数学模型做出简化,得到适用于工程应用的光伏电池数学模型,搭建光伏阵列模型;
[0092]
光伏电池的等效电路如图1所示,其数学表达式为:
[0093][0094]
式中,i
sc
为光生电流;id为流过二极管vd的电流;i0为二极管反向饱和电流;q为电子电荷常数(1.6
×
10-19
c);v为负载端电压;i
l
为负载工作电流;a为二极管品质因数;rs为等效串联电阻;r
sh
为等效并联电阻;k为玻尔兹曼常数(1.38
×
10-23
j/k);t为光伏电池温度。
[0095]
考虑到其中r
sh
、a、rs、i0参数的值与温度和光照等外界环境有关,难以确定,不便于工程应用,且对光伏电池模型精准度影响较低。对光伏电池数学模型做出如下两点简化:
[0096]
①
、通常情况下项的值远小于光生电流,因此忽略该项;
[0097]
②
、通常情况下rs远小于二极管正向导通电阻,设定i
l
=i
sc
;
[0098]
并且定义如下情况:
[0099]
a、开路状态下:i
l
=0,v=v
oc
;
[0100]
b、最大功率点处:v=vm,i
l
=im;
[0101]
此时,光伏电池等效电路数学模型可简化为:
[0102][0103]
式中,im为最佳工作电流电流,vm为最佳工作电压,v
oc
为开路电压。因此,只需要i
sc
、v
oc
、im和vm四个参数,就能以较高精度复现光伏电池的特性。
[0104]
运用matlab/simulink搭建光伏电池模型,单个光伏电池的四个参数分别为:v
oc
=43.6v、i
sc
=8.35a、vm=35v、im=7.6a。设置如表1所示的不同工况。
[0105]
表1不同工况下光伏阵列温度与辐照强度参数
[0106][0107]
对4种工况分别仿真得到如图2(a)、图2(b)所示的光伏阵列输出特性曲线。从图2(a)、图2(b)可知,在均匀光照情况下,光伏p-u特性曲线为单峰曲线;在局部阴影条件下,光伏p-u特性曲线为多峰曲线,且不同阴影下最大功率点的电压位置不同,此时传统mppt算法易陷入局部最优,导致发电效率降低。
[0108]
步骤2:搭建基于多策略改进的人工蜂群算法的光伏mppt控制模块、升压电路模块与pwm发生器模块,组成图3所示的光伏发电mppt控制系统模型图。
[0109]
步骤3:光伏mppt控制模块采集光伏阵列的输出电压与电流,通过多策略改进的人工蜂群算法进行实时搜索,找到最大输出功率点对应的最优占空比。
[0110]
图4为基于多策略改进的人工蜂群算法的mppt控制器搜索最大功率点所对应占空比的流程图。步骤3中多策略改进的人工蜂群算法搜索最大功率点所对应占空比的具体步骤包括:
[0111]
s3.1、定义参数:蜜源位置代表控制升压电路模块电压的占空比;蜜源花蜜量即为光伏阵列输出的功率p;算法搜索到的最优蜜源为花蜜量最多的蜜源,即为光伏阵列输出最大功率时控制升压电路模块电压的最优占空比。
[0112]
s3.2、初始化基本参数:设置蜜源数目sn,蜜源空间维度d,迭代次数t
max
;
[0113]
s3.3、更新枯竭参数阈值limit:
[0114]
蜜源空间维数与蜜源数量共同决定了limit的取值,具体表达式如下:
[0115]
limit=sn
×
d;
[0116]
s3.4、初始化蜜源位置:
[0117]
采用均匀化与随机化相结合的初始化策略:首先将蜜源x
ij
中第j维度区间均匀划分为与蜜源数sn相同的子区间,初始化操作时首先选定子区间,然后在子区间内随机生成初始蜜源,均匀化与随机化相结合的初始化表达式如下:
[0118][0119]
式中,i=1,2,
…
,sn,sn为蜜源(雇佣峰、跟随蜂)的数目;j=1,2,
…
,d,d为蜜源空间的维数;α
ij
为(0,1)间的随机值;和分别为第j维分量的最小值和最大值。
[0120]
s3.5、计算初始蜜源花蜜量,选择出花蜜量最多的蜜源,将其设置为精英个体gbest
[0121]
s3.6、更新权重因子ω(t):
[0122]
ω(t)为随着迭代次数t非线性变化的权重因子,ω(t)的数学表达式为:
[0123][0124]
式中,ω
max
和ω
min
分别为惯性权重ω的最大值0.9与最小值0.1,t为当前搜索次数,t
max
为最大搜索次数。
[0125]
由上式可知,在搜索初期,精英个体质量较低,自适应权重因子会降低精英个体对候选解的影响,随着迭代次数的增加,精英个体质量不断提高,自适应权重因子会逐渐提高精英个体对候选解的影响,从而提高算法的收敛速度和跟踪精度。
[0126]
s3.7、雇佣蜂搜索:
[0127]
每只雇佣蜂均拥有一个相对于的蜜源,雇佣蜂采用精英个体引导和非线性权重因子协同搜索策略,搜索新蜜源,数学表达式如下:
[0128]
x
ij
'=x
ij
ω(t)(x
ij-x
kj
) (1-ω(t))(gbest-x
ij
);
[0129]
式中,x
ij
'为新蜜源位置,x
kj
为随机选择的蜜源,k=1,2
…
,sn,且k≠i,gbest为精英个体。
[0130]
s3.8、雇佣蜂对搜索到的新蜜源与原有旧蜜源进行贪婪选择,保留花蜜较多的蜜源,贪婪选择的数学表达式为:
[0131][0132]
式中,fit(x
ij
')、fit(x
ij
)分别表示新旧蜜源的花蜜量,v
ij
为贪婪选择后的优质蜜源。
[0133]
s3.9、跟随蜂根据蜜源信息,通过轮盘赌策略概率选择某个雇佣蜂跟随,每个雇佣蜂被选中的概率为:
[0134][0135]
式中,p
ij
表示第ij个雇佣蜂被选中的概率;由上式可知,花蜜量越多的蜜源越容易被选择。
[0136]
s3.10、跟随蜂选定跟随的雇佣蜂之后,在其对应蜜源附近进行邻域搜索,寻找新蜜源,进行贪婪选择,若新蜜源花蜜量更多,则跟随蜂与雇佣蜂互换身份。邻域搜索的表达式为:
[0137]
x
ij
'=x
ij
ω(t)(x
ij-x
kj
) (1-ω(t))(gbest-x
ij
);
[0138]
s3.11、根据搜索次数更新变异概率p:
[0139]
变异概率p对群体多样性和收敛速度有较大的影响,p值越大,则种群多样性越大,算法全局搜索能力越强,但是会导致收敛速度变慢;反之,p值越小,则收敛速度越快,但不能有效帮助算法跳出局部最优。因此,p值更新公式设置为:
[0140][0141]
s3.12、为避免陷入局部最优,雇佣蜂与跟随蜂搜索完成后,以一定的概率p发生随机变异,具体表达式如下:
[0142][0143]
式中,α为(0,1)之间的随机数,为(-1,1)间的随机数。
[0144]
s3.13、侦查蜂搜索:
[0145]
某一蜜源超过limit次未得到更新,便会被放弃。此时,侦查蜂对被放弃的蜜源进行重新初始化,避免算法陷入局部最优,避免算法早熟收敛。但该机制也存在一定的弊端,若在算法搜索过程中,某个蜜源为当前全局最优蜜源,却因为枯竭参数limit过高而被放弃,会导致优势蜜源丢失,针对此问题,在雇佣蜂生成侦查蜂过程中引入定向变异操作,在生成随机侦查蜂的同时,生成一只孪生侦查蜂,总是位于当前枯竭蜜源邻域内,这种定向变异能够避免最优蜜源的搜索经验丢失,同时对最优蜜源进行一次邻域搜索,提高算法的搜索效率。执行定向变异操作的侦查蜂搜索公式为:
[0146][0147]
式中,trail
ij
为第ij个蜜源未被更新的次数,η为邻域扰动因子,η∈(-0.05,0.05),α
ij
为(0,1)间的随机值,为生成的孪生侦查蜂,limit为枯竭参数。
[0148]
s3.14、终止条件判断:当雇佣蜂找到的蜜源位置十分接近时,即蜜源对应占空比数值之差小于0.005时,则认为已经找到最大输出功率对应的占空比,数学表达式如下:
[0149]
|x
ij-x
kj
|《0.005。
[0150]
步骤4:基于多策略改进的人工蜂群算法的光伏mppt控制模块输出搜索到的最优占空比,通过pwm发生器生成相应脉冲信号驱动升压电路模块,使光伏发电系统输出最大功率。
[0151]
步骤5:判断环境是否发生变化,若是,返回步骤2,重启算法;若否,保持步骤3保存最大输出功率。
[0152]
步骤5中判断环境变化的依据为:当环境变化后,光伏阵列输出功率会发生变化,导致最大输出功率丢失,需要重启算法,可通过检测输出功率变化率δp来实现,故算法重启条件设置为:
[0153][0154]
式中,p
t
表示t时刻光伏阵列输出功率,p
max
代表追踪到的最大功率,δp=0.05。
[0155]
在静态条件与动态阴影条件下,采用本发明所提msfabc算法与p&o、pso和abc算法进行仿真分析,静态条件设置为表1中4种工况。动态阴影设置为表2中两种情景:
[0156]
表2光照数据变化表
[0157]
情景工况状态变化辐射照度变化/(w
·
m-2
)1工况1
→
工况21000/1000/1000
→
1000/1000/8002工况2
→
工况31000/1000/800
→
1000/800/600
[0158]
静态条件下4中算法的跟踪效果如图5(a)~图5(d)所示。其中,在均匀光照情况下,如图5(a)所示,四种算法均能寻找到最大功率点,但是msfanc算法在搜索过程中的功率波动较小。且收敛速度较快。在不同局部阴影工况下,如图5(b)、图5(c)、图5(d)所示,p&o算法均会陷入局部最大功率点,msfabc算法相比pso和abc算法,在搜索过程中的功率波动更小,更早收敛稳定,且收敛后的稳定值更高。
[0159]
表3所示为msfabc算法与其余3种算法在4种工况下的跟踪功率、跟踪精度、稳态后功率波动差值和跟踪时间数值。分析表3数据可知:
[0160]
表34种工况下不同算法的仿真结果
[0161][0162][0163]
对于跟踪精度,在4种工况下,msfabc算法均具有最高值,且最低值有99.3%,pso和abc算法跟踪精度也均在98%-99%之间,但p&o算法在局部遮阴工况下均陷入局部最大功率点,跟踪精度在47.7%-74.9%之间。因此在保证跟踪精度的前提下提高跟踪速度以及降低跟踪功率波动较为关键。
[0164]
对于跟踪时间,在4种工况下,msfabc算法明显快于pso与abc算法,在工况4下,msfabc算法搜索耗时0.042s,为pso算法耗时的65.9%,abc算法耗时的24.9%。
[0165]
对于功率波动,msfabc算法不仅在搜索过程中造成的功率波动较少,并且稳定后功率波动差值也最小。
[0166]
动态条件下,在局部遮阴后,p&o算法虽然重新搜索,但是却陷入局部最大功率点;遮阴消失后,虽然搜索到最大功率点附近,但是稳定后功率波动较大。在局部遮阴与遮阴消失前,本发明msfabc算法相比pso和abc算法能够更早收敛至稳定值,且搜索精度更高;在局部遮阴与遮阴消失后,本发明msfabc算法重启,相比其余3种算法,不仅跟踪速度更快,并且搜索过程中伴随较少的功率波动。
[0167]
综上,通过静态与动态环境下各算法仿真实验的对比分析可知,本发明所提msfabc算法的综合跟踪性能优于其他3种算法。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。