1.本发明属于智能交通信息技术领域,具体涉及一种基于场的智能车辆换道决策方法。
背景技术:
2.智能车辆换道与交通安全息息相关,尤其在高速行驶条件下更是一种具有潜在风险的驾驶行为。智能车辆换道决策的目的是使道路交通环境全局最优,基于此种目的对瓶颈路段的智能车辆进行换道引导,可以起到缓解交通压力,平滑交通流的作用。考虑车道场强影响因素,在对智能车辆换道需求判断后进行适当的提前换道引导控制,提供车辆更加安全的换道决策可避免通行能力下降现象。
3.换道模型是道路通行能力仿真的难点,在微观交通流模型中占有重要地位。传统的换道模型考虑因素较简单,一般仅考虑换道车辆与相邻车道前后方车辆之间的最小换道安全距离和车辆速度之间的关系,并且主要是基于驾驶员的思维方式建立的,这类模型的缺点是将驾驶员的驾驶行为固定化,未考虑驾驶员在驾驶过程中的一些潜在决策思维,无法模拟驾驶员在各种环境影响因素下的不确定性。
4.现有技术cn108983771a提供了一种车辆换道决策方法及装置,在考虑城市道路的复杂性与动态性的基础上,对综合换道构造函数进行计算,完成智能车辆换道时的决策。但是对于实际交通,交通流的演化态势与交通车辆个体的利益息息相关。估计车辆综合换道收益必须充分考虑每个车道当前的交通状态以及未来的变化趋势,在上述方法中,对于该因素的考虑较少。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种基于场的智能车辆换道决策方法解决上述问题。
6.为实现上述目的,本发明是这样设置的:一种基于场的智能车辆换道决策方法,具体包括以下步骤:
7.1)根据获取的智能车辆的行驶速度和加速度,判断智能车辆是否有换道需求,如果智能车辆有换道需求,则进入步骤2);
8.2)根据获取的观测路段的车辆速度和数量确定智能车辆行驶车道和相邻车道的车流平均速度及车流密度,分别计算观测路段智能车辆行驶车道和相邻车道的场强;所述智能车辆相邻车道包括智能车辆左侧相邻车道或智能车辆右侧相邻车道中的至少一个;
9.3)根据所述观测路段智能车辆行驶车道和相邻车道的场强,分别计算智能车辆行驶车道和相邻车道对智能车辆的吸引力,并计算智能车辆行驶车道和相邻车道对智能车辆的吸引力的差值;
10.4)根据所述观测路段智能车辆行驶车道的车流密度,计算智能车辆换道决策阈值;
11.5)根据所述智能车辆行驶车道与相邻车道对智能车辆的吸引力差值和智能车辆换道决策阈值,判断智能车辆是否可以进行换道。
12.进一步的,所述步骤1)具体包括以下步骤:
13.s1.1获取智能车辆的行驶速度v,将智能车辆的行驶速度v与智能车辆期望行驶速度v
exp
进行比较,若v≥v
exp
,则说明智能车辆无换道需求;若v《v
exp
,则进行s1.2;
14.s1.2获取智能车辆的行驶加速度a,若a》0,则说明智能车辆无换道需求;若a≤0,则说明智能车辆有换道需求,进行步骤2)。
15.进一步的,所述观测路段智能车辆行驶车道和相邻车道的场强,具体计算公式如下:
[0016][0017]
式中,
[0018]
ec表示测路段智能车辆行驶车道的场强;
[0019]el
表示测路段智能车辆左侧相邻车道的场强;
[0020]er
表示测路段智能车辆右侧相邻车道的场强;
[0021]
表示观测路段智能车辆行驶车道的车流平均车速;
[0022]
表示观测路段智能车辆左侧相邻车道的车流平均车速;
[0023]
表示观测路段智能车辆右侧相邻车道的车流平均车速;
[0024]vc(max)
表示观测路段智能车辆行驶车道的最大允许速度;
[0025]vl(max)
表示观测路段智能车辆左侧相邻车道的最大允许速度;
[0026]vr(max)
表示观测路段智能车辆右侧相邻车道的最大允许速度;
[0027]
ρc表示观测路段智能车辆行驶车道的车流密度;
[0028]
ρ
l
表示观测路段智能车辆左侧相邻车道的车流密度;
[0029]
ρr表示观测路段智能车辆右侧相邻车道的车流密度;
[0030]
ρ
c(max)
表示观测路段智能车辆行驶车道的最大允许车流密度;
[0031]
ρ
l(max)
表示观测路段智能车辆左侧相邻车道的最大允许车流密度;
[0032]
ρ
r(max)
表示观测路段智能车辆右侧相邻车道的最大允许车流密度;
[0033]
ω
c1
表示观测路段智能车辆行驶车道的车流平均车速的影响权重;
[0034]
ω
l1
表示观测路段智能车辆左侧车道的车流平均车速的影响权重;
[0035]
ω
r1
表示观测路段智能车辆右侧车道的车流平均车速的影响权重;
[0036]
ω
c2
表示观测路段智能车辆行驶车道的车流密度的影响权重;
[0037]
ω
l2
表示观测路段智能车辆左侧相邻车道的车流密度的影响权重;
[0038]
ω
r2
表示观测路段智能车辆右侧相邻车道的车流密度的影响权重。
[0039]
进一步的,所述智能车辆行驶车道和相邻车道对智能车辆的吸引力,具体计算公
式如下:
[0040]
其中,
△
v=v
r-v
exp
,
[0041]
式中,
[0042]
fc表示观测路段智能车辆行驶车道对智能车辆的吸引力;
[0043]fl
表示观测路段智能车辆左侧相邻车道对智能车辆的吸引力;
[0044]fr
表示观测路段智能车辆右侧相邻车道对智能车辆的吸引力;
[0045]
ec表示观测路段智能车辆行驶车道的场强;
[0046]el
表示观测路段智能车辆左侧相邻车道的场强;
[0047]er
表示观测路段智能车辆右侧相邻车道的场强;
[0048]
vr表示智能车辆的行驶速度;
[0049]vexp
表示智能车辆的期望行驶速度;
[0050]
△
v表示智能车辆行驶速度与期望行驶速度的速度差。
[0051]
进一步的,所述观测路段智能车辆行驶车道与相邻车道对智能车辆的吸引力的差值,具体计算公式如下:
[0052]
△
f=f
l-fc或
△
f=f
r-fc,
[0053]
式中,
[0054]fl
表示观测路段智能车辆左侧相邻车道对智能车辆的吸引力;
[0055]fr
表示观测路段智能车辆右侧相邻车道对智能车辆的吸引力;
[0056]
fc表示观测路段智能车辆行驶车道对智能车辆的吸引力。
[0057]
进一步的,所述智能车辆换道决策阈值f
exp
,具体计算公式如下:
[0058][0059]
式中,
[0060]
μ、λ1和λ2均为预设值;
[0061]
γ为第一换道风险系数;
[0062]
a为第二换道风险系数;
[0063]
ρc表示观测路段智能车辆行驶车道的车流密度;
[0064]
表示车道车流密度对时间的微分。
[0065]
进一步的,所述判断智能车辆是否换道包括以下步骤:在
△
f》0的情况下,预设时间段内始终有
△
f》f
exp
,则当智能车辆相邻车道上,智能车辆对应位置的相邻前后行驶车辆的行驶车距大于安全跟车间距时,智能车辆可以进行安全换道;反之,智能车辆不能进行换道。
[0066]
有益效果
[0067]
本发明提供的一种基于场的智能车辆换道决策方法,在现有通行能力仿真中的换道模型的基础上,为了便于仿真,意图通过最少的微观行为描述,以描述重现宏观行为,进一步简化了可行性检测与换道实施描述,更加注重换道需求判断。
附图说明
[0068]
图1是本实施例中的换道意图示意图;
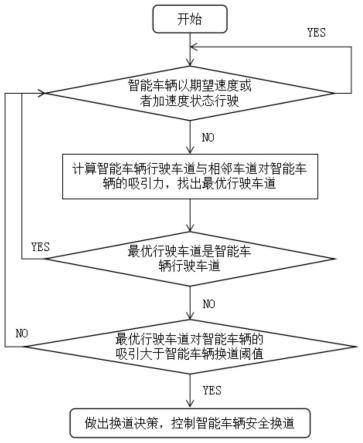
[0069]
图2是本实施例中基于场的智能车辆换道决策方法的流程图。
具体实施方式
[0070]
为使本发明的技术方案、优点和目的更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本技术的保护范围。
[0071]
下面结合附图和实施例对本发明作进一步说明。
[0072]
实施例
[0073]
如图2所示,本实施例提供了一种基于场的智能车辆换道决策方法,具体包括以下步骤:
[0074]
步骤1:通过智能车辆在观测路段的运动状态,判断智能车辆是否有换道需求。
[0075]
具体包括以下步骤:
[0076]
s1.1获取智能车辆的行驶速度v,将智能车辆的行驶速度v与智能车辆期望行驶速度v
exp
进行比较,判断智能车辆是否有换道需求;
[0077]
若v≥v
exp
,则说明智能车辆无换道需求;若v《v
exp
,则进行s1.2继续判断智能车辆是否有换道需求。
[0078]
s1.2获取智能车辆的行驶加速度a,判断智能车辆是否有换道需求;
[0079]
若a》0,则说明智能车辆无换道需求;若a≤0,则说明智能车辆有换道需求,则进入步骤2。
[0080]
步骤2:通过观测路段智能车辆行驶车道和相邻车道的车流平均速度及车流密度,分别计算观测路段智能车辆行驶车道和智能车辆相邻车道的场强。
[0081]
在一些实施例中,所述智能车辆相邻车道只有一条,此时,所述智能车辆相邻车道为智能车辆左侧相邻车道或智能车辆右侧相邻车道。
[0082]
在一些实施例中,所述智能车辆相邻车道有两条,此时,所述智能车辆相邻车道为智能车辆左侧相邻车道和智能车辆右侧相邻车道。
[0083]
具体包括以下步骤:
[0084]
s2.1分别计算观测路段智能车辆行驶车道和相邻车道的车流平均车速。
[0085]
所述观测路段智能车辆行驶车道的车流平均车速,具体计算公式如下:
[0086][0087]
式中,
[0088]
表示观测路段智能车辆行驶车道的车流平均车速;
[0089]
nc表示观测路段智能车辆行驶车道的车辆总数;
[0090]
cj表示观测路段智能车辆行驶车道的第cj辆车,其中cj=1,2,3,
…
,nc;
[0091]vcj
表示观测路段智能车辆行驶车道的第cj辆车的速度;
[0092]
在一些实施例中,所述智能车辆相邻车道只有一条,此时,所述智能车辆相邻车道
为智能车辆左侧相邻车道或智能车辆右侧相邻车道。所述观测路段智能车辆相邻车道的车流平均车速,具体计算公式如下:
[0093]
或
[0094]
式中:
[0095]
表示观测路段智能车辆左侧相邻车道的车流平均车速;
[0096]
表示观测路段智能车辆右侧相邻车道的车流平均车速;
[0097]nl
表示观测路段智能车辆左侧相邻车道的车辆总数;
[0098]
nr表示观测路段智能车辆右侧相邻车道的车辆总数;
[0099]
lj表示观测路段智能车辆左侧相邻车道的第lj辆车,其中lj=1,2,3,
…
,n
l
;
[0100]
rj表示观测路段智能车辆右侧相邻车道的第rj辆车,其中rj=1,2,3,
…
,nr;
[0101]vlj
表示观测路段智能车辆左侧相邻车道的第lj辆车的速度;
[0102]vrj
表示观测路段智能车辆右侧相邻车道的第rj辆车的速度。
[0103]
在一些实施例中,所述智能车辆相邻车道有两条,此时,所述智能车辆相邻车道为智能车辆左侧相邻车道和智能车辆右侧相邻车道。所述观测路段智能车辆相邻车道的车流平均车速,具体计算公式如下:
[0104][0105]
式中:
[0106]
表示观测路段智能车辆左侧相邻车道的车流平均车速;
[0107]
表示观测路段智能车辆右侧相邻车道的车流平均车速;
[0108]nl
表示观测路段智能车辆左侧相邻车道的车辆总数;
[0109]
nr表示观测路段智能车辆右侧相邻车道的车辆总数;
[0110]
lj表示观测路段智能车辆左侧相邻车道的第lj辆车,其中lj=1,2,3,
…
,n
l
;
[0111]
rj表示观测路段智能车辆右侧相邻车道的第rj辆车,其中rj=1,2,3,
…
,nr;
[0112]vlj
表示观测路段智能车辆左侧相邻车道的第lj辆车的速度;
[0113]vrj
表示观测路段智能车辆右侧相邻车道的第rj辆车的速度。
[0114]
s2.2分别计算所述观测路段智能车辆行驶车道和相邻车道的车流密度。
[0115]
所述观测路段智能车辆行驶车道的车流密度,具体计算公式如下:
[0116]
ρc=nc/lc,
[0117]
式中,
[0118]
ρc表示观测路段智能车辆行驶车道的车流密度;
[0119]
nc表示观测路段智能车辆行驶车道的车辆总数;
[0120]
lc表示观测路段智能车辆行驶车道的长度;
[0121]
在一些实施例中,所述智能车辆相邻车道只有一条,此时,所述智能车辆相邻车道
为智能车辆左侧相邻车道或智能车辆右侧相邻车道。所述观测路段智能车辆相邻车道的车流密度,具体计算公式如下:
[0122]
ρ
l
=n
l
/l
l
或ρr=nr/lr,
[0123]
式中:
[0124]
ρ
l
表示观测路段智能车辆左侧相邻车道的车流密度;
[0125]
ρr表示观测路段智能车辆右侧相邻车道的车流密度;
[0126]nl
表示观测路段智能车辆左侧相邻车道的车辆总数;
[0127]
nr表示观测路段智能车辆右侧相邻车道的车辆总数;
[0128]
l
l
表示观测路段智能车辆左侧相邻车道的长度;
[0129]
lr表示观测路段智能车辆右侧相邻车道的长度。
[0130]
在一些实施例中,所述智能车辆相邻车道有两条,此时,所述智能车辆相邻车道为智能车辆左侧相邻车道和智能车辆右侧相邻车道。所述观测路段智能车辆相邻车道的车流密度,具体计算公式如下:
[0131][0132]
式中:
[0133]
ρ
l
表示观测路段智能车辆左侧相邻车道的车流密度;
[0134]
ρr表示观测路段智能车辆右侧相邻车道的车流密度;
[0135]nl
表示观测路段智能车辆左侧相邻车道的车辆总数;
[0136]
nr表示观测路段智能车辆右侧相邻车道的车辆总数;
[0137]
l
l
表示观测路段智能车辆左侧相邻车道的长度;
[0138]
lr表示观测路段智能车辆右侧相邻车道的长度。
[0139]
s2.3分别计算所述观测路段智能车辆行驶车道和相邻车道的场强。
[0140]
所述观测路段智能车辆行驶车道的场强,具体计算公式如下:
[0141][0142]
式中,
[0143]
ec表示测路段智能车辆行驶车道的场强;
[0144]
表示观测路段智能车辆行驶车道的车流平均车速;
[0145]vc(max)
表示观测路段智能车辆行驶车道的最大允许速度;
[0146]
ρc表示观测路段智能车辆行驶车道的车流密度;
[0147]
ρ
c(max)
表示观测路段智能车辆行驶车道的最大允许车流密度;
[0148]
ω
c1
表示观测路段智能车辆行驶车道的车流平均车速的影响权重;
[0149]
ω
c2
表示观测路段智能车辆行驶车道的车流密度的影响权重;
[0150]
在一些实施例中,所述智能车辆相邻车道只有一条,此时,所述智能车辆相邻车道为智能车辆左侧相邻车道或智能车辆右侧相邻车道。所述观测路段智能车辆相邻车道的场强,具体计算公式如下:
[0151]
或
[0152]
式中,
[0153]el
表示测路段智能车辆左侧相邻车道的场强;
[0154]er
表示测路段智能车辆右侧相邻车道的场强;
[0155]
表示观测路段智能车辆左侧相邻车道的车流平均车速;
[0156]
表示观测路段智能车辆右侧相邻车道的车流平均车速;
[0157]vl(max)
表示观测路段智能车辆左侧相邻车道的最大允许速度;
[0158]vr(max)
表示观测路段智能车辆右侧相邻车道的最大允许速度;
[0159]
ρ
l
表示观测路段智能车辆左侧相邻车道的车流密度;
[0160]
ρr表示观测路段智能车辆右侧相邻车道的车流密度;
[0161]
ρ
l(max)
表示观测路段智能车辆左侧相邻车道的最大允许车流密度;
[0162]
ρ
r(max)
表示观测路段智能车辆右侧相邻车道的最大允许车流密度;
[0163]
ω
l1
表示观测路段智能车辆左侧车道的车流平均车速的影响权重;
[0164]
ω
r1
表示观测路段智能车辆右侧车道的车流平均车速的影响权重;
[0165]
ω
l2
表示观测路段智能车辆左侧相邻车道的车流密度的影响权重;
[0166]
ω
r2
表示观测路段智能车辆右侧相邻车道的车流密度的影响权重。
[0167]
在一些实施例中,所述智能车辆相邻车道有两条,此时,所述智能车辆相邻车道为智能车辆左侧相邻车道和右侧相邻车道。所述观测路段智能车辆相邻车道的场强,具体计算公式如下:
[0168][0169]
式中,
[0170]el
表示测路段智能车辆左侧相邻车道的场强;
[0171]er
表示测路段智能车辆右侧相邻车道的场强;
[0172]
表示观测路段智能车辆左侧相邻车道的车流平均车速;
[0173]
表示观测路段智能车辆右侧相邻车道的车流平均车速;
[0174]vl(max)
表示观测路段智能车辆左侧相邻车道的最大允许速度;
[0175]vr(max)
表示观测路段智能车辆右侧相邻车道的最大允许速度;
[0176]
ρ
l
表示观测路段智能车辆左侧相邻车道的车流密度;
[0177]
ρr表示观测路段智能车辆右侧相邻车道的车流密度;
[0178]
ρ
l(max)
表示观测路段智能车辆左侧相邻车道的最大允许车流密度;
[0179]
ρ
r(max)
表示观测路段智能车辆右侧相邻车道的最大允许车流密度;
[0180]
ω
l1
表示观测路段智能车辆左侧车道的车流平均车速的影响权重;
[0181]
ω
r1
表示观测路段智能车辆右侧车道的车流平均车速的影响权重;
[0182]
ω
l2
表示观测路段智能车辆左侧相邻车道的车流密度的影响权重;
[0183]
ω
r2
表示观测路段智能车辆右侧相邻车道的车流密度的影响权重。
[0184]
步骤3:根据所述观测路段智能车辆行驶车道和相邻车道的场强,分别计算智能车辆行驶车道和相邻车道对智能车辆的吸引力,并对智能车辆行驶车道和相邻车道对智能车辆的吸引力进行比较。
[0185]
具体包括以下步骤:
[0186]
s3.1计算智能车辆行驶速度与期望行驶速度的速度差
△
v,具体计算公式如下:
[0187]
△
v=v
r-v
exp
,
[0188]
式中,
[0189]
vr表示智能车辆的行驶速度;
[0190]vexp
表示智能车辆的期望行驶速度;
[0191]
△
v表示智能车辆行驶速度与期望行驶速度的速度差。
[0192]
s3.2分别计算智能车辆行驶车道与相邻车道对智能车辆的吸引力。
[0193]
所述智能车辆行驶车道对智能车辆的吸引力,具体计算公式如下:
[0194]
fc=
△
vec,
[0195]
式中,
[0196]
fc表示观测路段智能车辆行驶车道对智能车辆的吸引力;
[0197]
ec表示观测路段智能车辆行驶车道的场强。
[0198]
在一些实施例中,所述智能车辆相邻车道只有一条,此时,所述智能车辆相邻车道为智能车辆左侧相邻车道或右侧相邻车道。所述智能车辆相邻车道对智能车辆的吸引力,具体计算公式如下:
[0199]fl
=
△
ve
l
或fr=
△
ver,
[0200]
式中,
[0201]fl
表示观测路段智能车辆左侧相邻车道对智能车辆的吸引力;
[0202]fr
表示观测路段智能车辆右侧相邻车道对智能车辆的吸引力;
[0203]el
表示观测路段智能车辆左侧相邻车道的场强;
[0204]er
表示观测路段智能车辆右侧相邻车道的场强;
[0205]
在一些实施例中,所述智能车辆相邻车道有两条,此时,所述智能车辆相邻车道为智能车辆左侧相邻车道和右侧相邻车道。所述智能车辆相邻车道对智能车辆的吸引力,具体计算公式如下:
[0206][0207]
式中,
[0208]fl
表示观测路段智能车辆左侧相邻车道对智能车辆的吸引力;
[0209]fr
表示观测路段智能车辆右侧相邻车道对智能车辆的吸引力;
[0210]el
表示观测路段智能车辆左侧相邻车道的场强;
[0211]er
表示观测路段智能车辆右侧相邻车道的场强。
[0212]
s3.3计算智能车辆相邻车道与智能车辆行驶车道对智能车辆的吸引力的差值。
[0213]
在一些实施例中,所述智能车辆相邻车道只有一条,此时,所述智能车辆相邻车道为智能车辆左侧相邻车道或智能车辆右侧相邻车道。
[0214]
智能车辆相邻车道与智能车辆行驶车道对智能车辆的吸引力的差值
△
f,具体计算公式如下:
[0215]
△
f=f
l-fc或
△
f=f
r-fc,
[0216]
式中,
[0217]fl
表示智能车辆左侧相邻车道对智能车辆的吸引力;
[0218]fr
表示智能车辆右侧相邻车道对智能车辆的吸引力;
[0219]
fc表示智能车辆行驶车道对智能车辆的吸引力。
[0220]
当
△
f》0时,则智能车辆相邻车道为智能车辆的最优行驶车道;当
△
f《0时,则智能车辆行驶车道为智能车辆的最优行驶车道;当
△
f=0时,则智能车辆行驶车道与相邻车道均为智能车辆的最优行驶车道。
[0221]
在一些实施例中,所述智能车辆相邻车道有两条,此时,所述智能车辆相邻车道为智能车辆左侧相邻车道和智能车辆右侧相邻车道,智能车辆相邻车道与智能车辆行驶车道对智能车辆的吸引力的差值
△
f,具体计算公式如下:
[0222][0223]
式中,
[0224]fl
表示智能车辆左侧相邻车道对智能车辆的吸引力;
[0225]fr
表示智能车辆右侧相邻车道对智能车辆的吸引力;
[0226]
fc表示智能车辆行驶车道对智能车辆的吸引力。
[0227]
当所述智能车辆相邻车道有两条时,所述智能车辆相邻车道与智能车辆行驶车道对智能车辆的吸引力的差值
△
f为
△
f1与
△
f2中值较大的一个。
[0228]
当
△
f》0时,则所述智能车辆左侧相邻车道或右侧相邻车道为智能车辆的最优行驶车道;当
△
f《0时,则所述智能车辆行驶车道为智能车辆的最优行驶车道;当
△
f=0时,则所述智能车辆行驶车道与相邻车道均为智能车辆的最优行驶车道。
[0229]
步骤4:根据观测路段智能车辆行驶车道的车流密度计算智能车辆换道决策阈值f
exp
,具体计算公式如下:
[0230][0231]
式中,
[0232]
μ、λ1和λ2均为预设值,其取值可根据具体情况进行修改;
[0233]
γ为第一换道风险系数;
[0234]
a为第二换道风险系数;
[0235]
ρc表示观测路段智能车辆行驶车道的车流密度;
[0236]
表示车道车流密度对时间的微分。
[0237]
步骤5:通过所述智能车辆相邻车道与智能车辆行驶车道对智能车辆的吸引力差值和智能车辆换道决策阈值,判断车辆是否可以进行换道。
[0238]
在
△
f》0的情况下,预设时间段内始终有
△
f》f
exp
,则当智能车辆相邻车道上,智能车辆对应位置的相邻前后行驶车辆的行驶车距大于安全跟车间距时,智能车辆可以进行安
全换道;反之,智能车辆不能进行换道。所述预设时间段可以为任意时间段。
[0239]
如图1所示,当观测路段只有两条行车车道时,智能车辆行驶车道有车辆a1、a2和a3,智能车辆相邻车道有车辆b1、b2和b3。若智能车辆a2有换道需求,在
△
f》0的情况下,预设时间段内始终有
△
f》f
exp
,则当智能车辆相邻车道的车辆b1和b2或车辆b2和b3的行驶车距大于安全跟车间距时,智能车辆a2可以进行安全换道。
[0240]
综上所述,本发明提供的一种基于场的智能车辆换道决策方法,在现有通行能力仿真中的换道模型的基础上,为了便于仿真,意图通过最少的微观行为描述,以描述重现宏观行为,进一步简化了可行性检测与换道实施描述,更加注重换道需求判断。
[0241]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的保护范围当中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。