一种基于uwb的设备定位搬运安装系统
技术领域
1.本发明涉及铁路四电施工安装技术领域,具体为一种基于uwb的设备定位搬运安装系统。
背景技术:
2.随着现代科学技术的发展和经济水平的日益提高,现代铁路技术也发生着突飞猛进的变化,在此背景下,对铁路信号的施工也提出了更高的工艺要求,传统的施工方法人工操作占比较高,误差率较高,易返工,影响施工效率,逐渐满足不了当下的施工要求,因此需要改进传统施工工具,提高施工质量。现今设备定位安装主要依靠使用水平仪,卷尺测出具体位置,利用冲击钻钻孔膨胀螺丝固定,实现设备机柜的定测安装。由于人工操作,安装效果易受个人水平影响,造成误差返工,施工效率不高,施工工艺不满足要求。
技术实现要素:
3.本部分的目的在于概述本发明的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
4.鉴于上述和/或现有一种基于uwb的设备定位搬运安装系统中存在的问题,提出了本发明。
5.因此,本发明的目的是提供一种基于uwb的设备定位搬运安装系统,主要利用超宽带uwb技术而设计,该技术是一种无线载波通信,uwb技术具有系统复杂度低,发射信号功率谱密度低,对信道衰落不敏感,截获能力低,定位精度高等优点,总体分为两部分,分别设置为标签和基站模式,基站安装在装载车上,用来接收标签发送来的信号,同时朝向标签位置行驶,尤其适用于室内等密集多径场所的高速无线接入,可批量生产,本设计在提高效率的基础下,很好的改善了原有产品的缺点。
6.为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
7.一种基于uwb的设备定位搬运安装系统,其包括:
8.挡板,所述挡板侧壁安装有两个步进电机,两个所述步进电机分别安装在所述挡板侧壁靠近所述挡板两侧沿口位置,所述步进电机输出端贯穿伸出所述挡板侧壁,所述步进电机输出端安装有齿轮;
9.滑板,所述滑板为两个并反向设置在所述挡板侧壁,所述滑板侧壁开设有齿条槽,两个所述齿轮分别位于两个所述齿条槽内部;
10.光电开关,所述光电开关安装在其中一个所述滑板侧壁,所述光电开关底部安装有触发条;
11.固定块,所述固定块安装在另一个所述滑板侧壁,所述固定块顶部开设有滑槽;
12.底座,所述底座位于所述滑槽内部,所述底座顶部安装有钻头。
13.作为本发明所述的一种基于uwb的设备定位搬运安装系统的一种优选方案,其中,所述挡板侧壁安装有连接杆,所述连接杆位于所述挡板侧壁中心位置,所述挡板侧壁还安装有两个辅助杆,两个所述辅助杆以所述连接杆为中心对称设置在所述挡板侧壁。
14.作为本发明所述的一种基于uwb的设备定位搬运安装系统的一种优选方案,其中,所述挡板侧壁还开设有两个导向槽,所述导向槽内部安装有导向杆。
15.作为本发明所述的一种基于uwb的设备定位搬运安装系统的一种优选方案,其中,所述滑板侧壁安装有导向板,所述导向板位于所述导向槽内部,所述导向板顶部开设有导向孔,所述导向杆贯穿所述导向孔。
16.作为本发明所述的一种基于uwb的设备定位搬运安装系统的一种优选方案,其中,所述滑槽对称侧壁开设有第二导向槽。
17.作为本发明所述的一种基于uwb的设备定位搬运安装系统的一种优选方案,其中,所述固定块顶部开设有第二滑槽,所述第二滑槽内部设置有第二滑板,所述第二滑板侧壁安装有第二弹簧,所述第二弹簧另一端与所述第二滑槽侧壁连接,所述第二滑板另一侧壁安装有限位板,所述限位板伸出所述第二滑槽并伸入所述滑槽内部。
18.作为本发明所述的一种基于uwb的设备定位搬运安装系统的一种优选方案,其中,所述滑槽底部安装有弹簧,所述弹簧顶部安装有推板。
19.作为本发明所述的一种基于uwb的设备定位搬运安装系统的一种优选方案,其中,所述底座对称侧壁安装有第二导向板,所述第二导向板位于所述第二导向槽内部,所述底座侧壁开设有限位槽,所述限位板伸入所述限位槽内部。
20.与现有技术相比:主要利用超宽带uwb技术而设计,该技术是一种无线载波通信,uwb技术具有系统复杂度低,发射信号功率谱密度低,对信道衰落不敏感,截获能力低,定位精度高等优点,总体分为两部分,分别设置为标签和基站模式,基站安装在装载车上,用来接收标签发送来的信号,同时朝向标签位置行驶,尤其适用于室内等密集多径场所的高速无线接入,可批量生产,本设计在提高效率的基础下,很好的改善了原有产品的缺点。
附图说明
21.为了更清楚地说明本发明实施方式的技术方案,下面将将结合附图和详细实施方式对本发明进行详细说明,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
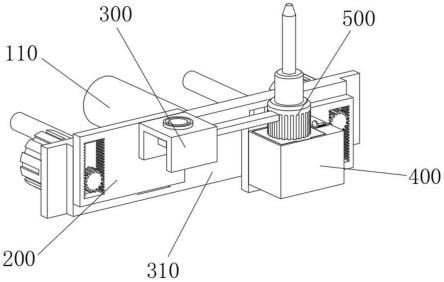
22.图1为本发明一种基于uwb的设备定位搬运安装系统整体结构图;
23.图2为本发明一种基于uwb的设备定位搬运安装系统挡板结构图;
24.图3为本发明一种基于uwb的设备定位搬运安装系统滑板结构图;
25.图4为本发明一种基于uwb的设备定位搬运安装系统固定块结构图;
26.图5为本发明一种基于uwb的设备定位搬运安装系统底座结构图。
具体实施方式
27.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。
28.其次,本发明结合示意图进行详细描述,在详述本发明实施方式时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本发明保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
29.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
30.本发明提供一种基于uwb的设备定位搬运安装系统,主要利用超宽带uwb技术而设计,该技术是一种无线载波通信,uwb技术具有系统复杂度低,发射信号功率谱密度低,对信道衰落不敏感,截获能力低,定位精度高等优点,总体分为两部分,分别设置为标签和基站模式,基站安装在装载车上,用来接收标签发送来的信号,同时朝向标签位置行驶,尤其适用于室内等密集多径场所的高速无线接入,可批量生产,本设计在提高效率的基础下,很好的改善了原有产品的缺点。
31.图1-5示出的是本发明一种基于uwb的设备定位搬运安装系统实施方式的一种结构示意图,请参阅图1-图5,本实施方式的一种基于uwb的设备定位搬运安装系统包括挡板100、滑板200、光电开关300、固定块400和底座500。
32.挡板100侧壁安装有两个步进电机130,两个步进电机130分别安装在挡板100侧壁靠近挡板100两侧沿口位置,步进电机130输出端贯穿伸出挡板100侧壁,步进电机130输出端安装有齿轮140,挡板100侧壁安装有连接杆110,连接杆110位于挡板100侧壁中心位置,挡板100侧壁还安装有两个辅助杆120,两个辅助杆120以连接杆110为中心对称设置在挡板100侧壁,连接杆110用于将挡板100与小车顶部固定基点连接,通过辅助杆120对挡板100进行辅助固定,能够增加挡板100安装在小车顶部时的稳定性,挡板100侧壁还开设有两个导向槽150,导向槽150内部安装有导向杆160,两个导向槽150对称开设在挡板100侧壁,并且分别与两个滑板200位置配合,。
33.滑板200为两个并反向设置在挡板100侧壁,滑板200侧壁开设有齿条槽210,两个齿轮140分别位于两个齿条槽210内部,滑板200侧壁安装有导向板220,导向板220位于导向槽150内部,导向板220顶部开设有导向孔230,导向杆160贯穿导向孔230,通过启动步进电机130带动齿轮140旋转,齿轮140表面轮齿与齿条槽210内壁卡齿相互咬合,通过齿轮140转动可以带动滑板200垂直滑动,分别调节光电开关300与固定块400的高度,当滑板200垂直滑动时,导向板220在导向槽150内部滑动,导向孔230在导向杆160杆身滑动,能够将滑板200连接在挡板100侧壁的同时使滑板200能够独立于挡板100垂直移动,并且增加挡板100移动时的稳定性。
34.光电开关300安装在其中一个滑板200侧壁,光电开关300底部安装有触发条310,触发条310另一端伸至固定块400顶部,通过触发条310触碰固定块400发出信号停止步进电机130带动固定块400继续滑动。
35.固定块400安装在另一个滑板200侧壁,固定块400顶部开设有滑槽410,滑槽410对称侧壁开设有第二导向槽420,滑槽410底部安装有弹簧430,弹簧430顶部安装有推板440,固定块400顶部开设有第二滑槽450,第二滑槽450内部设置有第二滑板460,第二滑板460侧壁安装有第二弹簧470,第二弹簧470另一端与第二滑槽450侧壁连接,第二滑板460另一侧壁安装有限位板480,限位板480伸出第二滑槽450并伸入滑槽410内部,通过拉动第二滑板460使第二滑板460在第二滑槽450内部滑动并挤压第二弹簧470,限位板480随第二滑板460
滑动收入第二滑槽450内部,此时将底座500插入滑槽410内部,底座500在滑槽410内部向下滑动推动推板440挤压弹簧430,松开第二滑板460,第二弹簧470回弹推动限位板480伸入限位槽530内部,将底座500固定在滑槽410内部,当需要对底座500拆卸时,拉动第二滑板460使限位板480收入第二导向槽420内部,此时弹簧430回弹推动推板440带动底座500向上弹出,方便对底座500和钻头510进行安装拆卸。
36.底座500位于滑槽410内部,底座500顶部安装有钻头510,底座500对称侧壁安装有第二导向板520,第二导向板520位于第二导向槽420内部,底座500侧壁开设有限位槽530,限位板480伸入限位槽530内部,钻头510由主控直接控制,当达到指定位置时开启钻头510,防止误触完成危险。
37.结合图1-图5,本实施方式的一种基于uwb的设备定位搬运安装系统,通过在小车上方两角处加入两个固定基站,用于连接挡板100,在打孔地方放入移动标签,通过toa算法可以确定手环到两射频模块的距离,两射频模块之间的距离固定,利用海伦公式和三角形面积相等原理,即得到标签与两基站所在直线的垂直距离h,并由高度补偿传感器得到标签与射频模块的垂直误差x,由勾股定理即可算出标签与智能跟随车水平方向的直线距离l。完成车对标签的定位,整个过程中用低通滤波算法和卡尔曼滤波算法对数据融合,以尽可能减小误差,根据实际判断出钻孔深度,然后通过齿轮140和齿条槽210配合改变光电开关300位置,当钻头510向上运动,触碰到光电开关300即达到深度,停止,让打孔深度更加准确。
38.虽然在上文中已经参考实施方式对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。