1.本发明属于电机控制领域,涉及同步调相机的起动技术,尤其是一种基于转子磁链定向的同步调相机起动方法。
背景技术:
2.电力系统中同步发电机是最常见的旋转设备,它在发出有功功率的同时,还可以发出无功功率,而且是性能最优越的无功电源。同步调相机是一种特殊运行状态下的同步发电机,当应用在电力系统时,能根据系统的需要,在电网侧电压下降时自动的增加无功输出、电网侧电压上升时自动吸收无功,让电压值维持稳定,进而提高电力系统的稳定性,改善系统供电质量。在现代电网调节过程中,同步调相机不仅能快速灵活地实现负荷动态变化跟踪、调峰填谷、调频、调相、事故备用等多种功能,并且环保节能。随着我国近年来对智能电网建设以及新能源发展的重视,同步调相机在我国的发展潜力越来越大。
3.同步调相机起动方式和常规发电机的起动方式是不一样的,因为调相机自身没有起动力矩,不可以进行自起动,需采取其它起动方法,主要有以下四种方法:
①
直接起动;
②
异步起动;
③
电动机起动;
④
变频器起动。对于直接起动法,起动电流大,对电机有较大冲击,仅用于小型机组起动。对于电动机起动法,受起动电机和液力耦合器最大功率的限制,有起动容量不够的问题,所以也不适合同步调相机的起动。对于变频器起动,这种方法具有软起动、可频繁起动,调速范围宽等优点。但是,随负载转矩加大(转速不变),电机电压升高、功率因数降低;起动过程中反电势过大而静止变频器无法提供足够大电压而导致需要更大容量静止变频器。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供一种原理简单、可以实现功率因数的给定精确控制和系统稳定运行的同步调相机起动控制方法,提高了效率,减小静止变频器容量。
5.本发明解决其技术问题是采取以下技术方案实现的:
6.一种基于转子磁链定向的同步调相机起动方法,包括同步调相机在转子磁链定向下的电流闭环控制、转速闭环控制、弱磁控制、坐标变换以及svpwm(空间矢量脉宽调制,简称svpwm)算法模块;将转子磁链与d-q两相同步旋转坐标系d轴重合,q轴超前d轴90
°
,根据采样得到的同步调相机定子三相电流、励磁电流、转子位置角度以及负载角,将定子三相电流从abc三相静止坐标系转换到d-q两相同步旋转坐标系;通过控制q轴定子电流分量对调相机转矩进行控制;通过调节d轴定子电流分量给定值与转子励磁电流给定值,在保证气隙磁场恒定的前提下,实现功率因数调节;利用定子电流d、q轴给定值与实际值间的误差,经电流环比例积分(proportional integral简称pi)控制器和dq轴解耦算法,计算得到参考电压;采用svpwm调制策略,得到控制静止变频器中功率器件开关的6路脉冲信号;通过对励磁回路电流进行比例积分控制计算得到励磁电压给定值,再采用spwm(正弦脉宽调制,简称
spwm)调制策略得到4路脉冲信号,并送入单相两电平变流器实现对励磁回路电流的控制。
7.而且,的计算是将转子轴上的位置传感器信号经微分后的实际转速值与给定转速值经过比例计算控制器计算得出。
8.而且,实现三相静止坐标系到两相同步旋转坐标系的坐标变换,是根据采集到的电机定子三相电流值以及转子位置角度,利用坐标变换公式计算得到,将电机的控制变为按转子磁链位置定向的电流与转矩的分别控制。
9.而且,实际功率因数的计算是根据实际采样到的负载角度得到,实际功率因数角为定子感应电动势与定子电流矢量夹角,这个角度等于转子磁链轴与气隙磁场矢量的夹角(负载角)通过负载角的大小可以观测到同步调相机的功率因数。
10.而且,励磁电流给定值的计算是根据定子电流励磁分量给定值得到,计算出需求功率因数时的定子电流励磁分量给定值,与励磁电流参考值相加,可以得到励磁电流给定值。利用励磁电流给定值与实际值if比较经过比例积分控制器得到励磁电压给定值为同步电机转子绕组提供励磁电压。
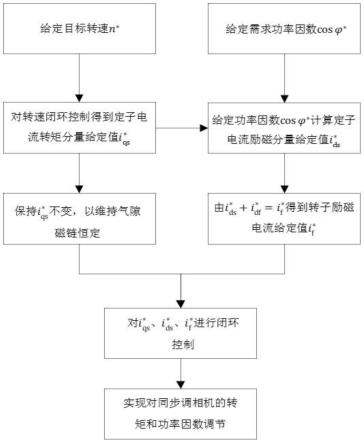
11.而且,所述的基于转子磁链定向的同步调相机起动方法步骤为:
12.(1)由起动需求给定目标转速n*和功率因数
13.(2)通过速度环pi控制器对目标转速n*进行闭环控制,得到电磁转矩给定值再通过公式计算得到定子电流转矩分量给定值
14.(3)根据给定功率因数及定子电压矢量角参考值计算在该功率因数下起动的定子电流励磁分量给定值
15.(4)由定子电流励磁分量给定值以及励磁电流参考值得到转子励磁电流给定值调节转子励磁电流增磁或去磁,维持气隙磁链恒定;
16.(5)对定子电流励磁分量给定值定子电流转矩分量给定值及转子励磁电流给定值进行闭环控制,由调节器输出定子d-q两相同步旋转坐标系下d轴定子电压参考值q轴定子电压参考值和励磁电压给定值同时,对进行极坐标变换得到定子电压矢量角参考值
17.(6)励磁电压给定值采用spwm合成方式得到4路脉冲信号,并送入单相两电平变流器实现对励磁回路电流的控制;
18.(7)将d轴电压参考值q轴电压参考值由d-q两相同步旋转坐标系变换到α-β两相静止坐标系,得到定子α-β坐标系下α轴电压参考值β轴电压参考值作为svpwm模块的参考电压输入值,通过空间矢量脉宽调制算法生成6路脉冲信号送入静止变频器,实现同步调相机的变频起动控制。
19.本发明的优点和积极效果是:
20.1.与传统方法相比,该控制策略气隙磁链始终保持幅值与相位恒定,且不随负载的变化而变化,只有定子q轴电流产生电磁转矩,从而省去了负载的气隙磁链观测环节,在
实际系统中更为简便易行。
21.2.本发明起动方法,可以动态调节功率因数,实现同步调相机以最大的功率因数状态起动运行,减小静止变频器所需容量,提高了效率,节约了成本。
22.3.本发明起动方法,避免了在实际系统中使用复杂的磁链观测算法,在实际应用中更加简单。
附图说明
23.图1为本发明方法流程图;
24.图2为同步调相机基于转子磁链定向的矢量控制框图;
25.图3为同步调相机d-q轴系下定子电压电流空间矢量图
26.图4定子电流励磁分量给定值与时空间矢量对比图
具体实施方式
27.下面结合附图并通过具体实施例对本发明作进一步详细说明,以下实施只是描述性的,不是限定性的,不能以此限定本发明的保护范围。
28.一种基于转子磁链定向的同步调相机起动方法,步骤如下:
29.(1)由目标需求给定目标转速n*和功率因数
30.(2)对给定目标转速n*进行闭环控制,由转速环pi控制器计算得到定子电流转矩分量给定值具体为:
[0031][0032]
由上式可知,电磁转矩与是比例关系,这样就可以通过控制来实现对电磁转矩的控制。
[0033]
(3)根据给定功率因数利用反余弦函数,求解得到功率因数角如图3所示
[0034][0035]
对定子d-q轴电压参考值进行极坐标变换,计算定子电压矢量角参考值
[0036][0037]
由空间定子电压矢量与电流矢量关系可以计算出定子电流励磁分量给定值如下所示:
[0038][0039]
(4)如图4所示,图中f
qs
为定子q轴磁链,f
df
为励磁电流产生磁链,fs为定子磁链,ψ为合成气隙磁链。保持不变,改变定子电流励磁分量给定值改变定子电流幅值和相
位,调节功率因数。同时,在d轴通过反向增加励磁电流抵消掉定子电流励磁分量产生的磁场来保持合成气隙磁场恒定。其中励磁电流补偿量与赋值相同,相位相差180
°
,由此获得励磁电流给定值
[0040][0041][0042]
式中,为励磁电流参考值,k
dif
为励磁电流参考值的比例系数,为转子励磁磁链参考值。
[0043]
通过转子磁链定向,可以实现通过对转矩控制。通过改变定子励磁电流分量给定值,可以同时调节电机的功率因数,将电机的转矩和功率因数控制变为按转子磁链位置定向的电流控制。
[0044]
(5)对与励磁电流给定值进行闭环控制,将与与反馈的d-q轴电流实际值i
ds
、i
qs
与励磁电流实际值if生成的偏差信号送入到励磁电流pi控制器,得到定子d-q轴电压参考值和励磁电压给定值其中以及通过下式计算得到
[0045][0046][0047]
式中,u
qs_pi
为q轴定子电流pi控制器输出的定子q轴电压,u
ds_pi
为d轴定子电流pi控制器输出的定子d轴电压,k
iqs
为q轴定子电流pi控制器中的积分增益,k
ids
为d轴定子电流pi控制器中的积分增益流,k
pqs
为q轴定子电流pi控制器中的比例增益,k
pds
为d轴定子电流pi控制器中的比例增益,s为复频率。
[0048]
定子d-q轴电压参考值为
[0049][0050][0051]
式中,rs为定子电阻,ωm转子机械角速度,l
ds
为定子d轴电感,flux为定子磁链。
[0052]
励磁电压给定值为
[0053][0054]
式中,k
pf
为励磁电流pi控制器中的比例增益,k
if
为励磁电流pi控制器中的积分增益。
[0055]
励磁电压给定值再采用spwm合成方式得到4路脉冲信号,并送入单相两电平变流器实现对励磁回路电流的控制,其中u
f_dc
为励磁回路直流电压。
[0056]
定子d-q轴电流实际值由实际定子三相电流u
as
、u
bs
、u
cs
经过坐标变换得到
[0057][0058][0059]
其中i
αs
为定子电流α轴分量,i
βs
为定子电流β轴分量。
[0060]
(6)对定子电压参考值进行坐标变换得到两相静止坐标系下的α轴定子电压参考值β轴定子电压参考值其中坐标变换模块的计算公式为
[0061][0062]
将得到的电压参考矢量作为两电平svpwm算法的输入,然后将得到6路驱动功率器件的信号送入静止变频器,其中u
dc
为直流母线电压,给同步调相机提供三相交流电源,最终实现对同步调相机的控制。
[0063]
通过以上可以得出结论,基于转子磁链定向控制方法应用简单,无需复杂的磁链观测,可通过本发明的方法可以满足同步调相机以最大功率因数起动,减小静止变频器容量,避免因静止变频器输出电压无法达到给定值而导致起动失败。
[0064]
尽管为说明目的公开了本发明的实施方法和附图,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本发明的范围不局限于实施例和附图所公开的内容。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。