技术特征:
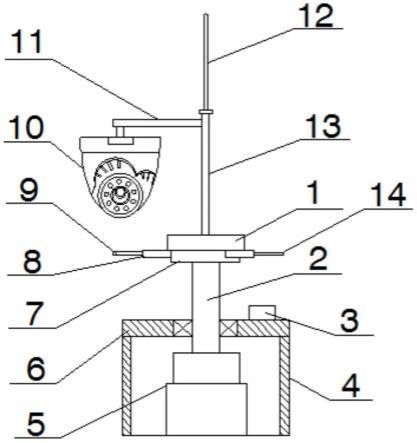
1.一种填充率测量方法,获得空间三维模型,所述空间三维模型是通过形成有开口且具有第1存放空间的第1存放部,由与所述第1存放部相对的测距传感器经由所述开口进行测量而得到的模型,所述第1存放空间用于存放测量对象物,获得存放三维模型,所述存放三维模型是没有存放所述测量对象物的所述第1存放部的三维模型,利用获得的所述空间三维模型以及所述存放三维模型,提取所述空间三维模型中的对象物部分,所述对象物部分是所述空间三维模型中与所述测量对象物对应的部分,利用提取的所述对象物部分,估计对象物三维模型,所述对象物三维模型是所述第1存放空间内的测量对象物的三维模型,利用所述存放三维模型以及所述对象物三维模型,算出所述测量对象物相对于所述第1存放空间的第1填充率。2.如权利要求1所述的填充率测量方法,在所述估计中,根据以所述第1存放部的一部分的形状为基准的第1三维坐标系,对所述对象物三维模型进行估计。3.如权利要求2所述的填充率测量方法,所述填充率测量方法进一步仅以所述第1存放部的所述一部分的形状为基准,算出所述第1三维坐标系。4.如权利要求3所述的填充率测量方法,所述一部分的形状是所述开口的形状。5.如权利要求1所述的填充率测量方法,在所述估计中,根据以被设置在所述第1存放部的标记的位置为基准的第1三维坐标系,对所述对象物三维模型进行估计。6.如权利要求2所述的填充率测量方法,在所述估计中,在从所述测距传感器朝向所述测量对象物的方向中,根据所述测量对象物的与所述测距传感器对应的第1部分的形状,来对所述测量对象物的与所述测距传感器不对应的第2部分的形状进行估计,从而对所述对象物三维模型进行估计。7.如权利要求6所述的填充率测量方法,所述第1存放部进一步具有开闭部,所述开闭部具有贯通孔,并且以在闭状态下覆盖所述开口的方式而被配置,所述第1部分是在所述方向中,与闭状态的所述开闭部的所述贯通孔相对的部分,所述第2部分是在所述方向中,由闭状态的所述开闭部遮挡的部分,所述填充率测量方法进一步对所述开闭部是开状态还是闭状态进行判断,在所述开闭部为所述开状态的情况下,通过进行所述提取以及所述估计,来对所述对象物三维模型进行估计,在所述开闭部为所述闭状态的情况下,根据所述第1部分,对所述第2部分进行估计,利用所述第1部分和估计的所述第2部分、以及所述存放三维模型,对所述对象物三维模型进行估计。8.如权利要求7所述的填充率测量方法,
所述方向是沿着水平方向的方向。9.如权利要求1至8的任一项所述的填充率测量方法,在所述算出中,将所述第1存放空间中存放的所述测量对象物的体积,相对于所述第1存放空间中的能够存放所述测量对象物的空间的容积的比例,作为所述第1填充率来算出。10.如权利要求1至9的任一项所述的填充率测量方法,所述第1存放部以及添加的第1存放部,被存放在第2存放部所具有的第2存放空间,所述填充率测量方法进一步算出所述第1存放部以及所述添加的第1存放部相对于所述第2存放空间的第2填充率。11.如权利要求1至10的任一项所述的填充率测量方法,所述存放三维模型是由所述测距传感器以及添加的测距传感器测量的三维模型。12.如权利要求1至11的任一项所述的填充率测量方法,所述测距传感器被固定的位置位于所述第1存放部的上方,且所述测距传感器至少具有2台用于生成所述空间三维模型的相机。13.一种信息处理装置,具备处理器以及存储器,所述处理器利用所述存储器,获得空间三维模型,所述空间三维模型是通过形成有开口且具有第1存放空间的第1存放部,由与所述第1存放部相对的测距传感器经由所述开口进行测量而得到的模型,所述第1存放空间用于存放测量对象物,获得存放三维模型,所述存放三维模型是没有存放所述测量对象物的所述第1存放部的三维模型,利用获得的所述空间三维模型以及所述存放三维模型,提取所述存放三维模型中的对象物部分,所述对象物部分是所述存放三维模型中与所述测量对象物对应的部分,利用提取的所述对象物部分,估计对象物三维模型,所述对象物三维模型是所述第1存放空间内的测量对象物的三维模型,利用所述存放三维模型以及所述对象物三维模型,算出所述测量对象物相对于所述第1存放空间的第1填充率。14.一种程序,用于使计算机执行填充率测量方法,在所述填充率测量方法中,获得空间三维模型,所述空间三维模型是通过形成有开口且具有第1存放空间的第1存放部,由与所述第1存放部相对的测距传感器经由所述开口进行测量而得到的模型,所述第1存放空间用于存放测量对象物,获得存放三维模型,所述存放三维模型是没有存放所述测量对象物的所述第1存放部的三维模型,利用获得的所述空间三维模型以及所述存放三维模型,提取所述存放三维模型中的对象物部分,所述对象物部分是所述存放三维模型中与所述测量对象物对应的部分,利用提取的所述对象物部分,估计对象物三维模型,所述对象物三维模型是所述第1存放空间内的测量对象物的三维模型,利用所述存放三维模型以及所述对象物三维模型,算出所述测量对象物相对于所述第1存放空间的第1填充率。
技术总结
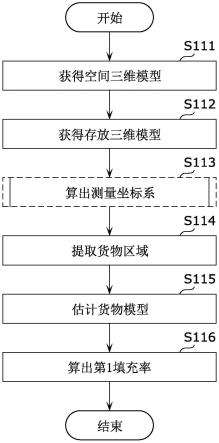
一种填充率测量方法,(S111)获得空间三维模型,该空间三维模型是通过在第1方向侧形成有开口且具有第1存放空间的第1存放部,由测距传感器从第1方向进行测量而得到的模型,所述第1存放空间用于存放测量对象物;(S112)获得存放三维模型,该存放三维模型是没有存放测量对象物的第1存放部的三维模型;(S114)利用获得的空间三维模型以及存放三维模型,提取存放三维模型中的与测量对象物对应的部分即对象物部分;(S115)利用提取的对象物部分,估计对象物三维模型,该对象物三维模型是第1存放空间内的测量对象物的三维模型;以及(S116)利用存放三维模型以及对象物三维模型,算出测量对象物相对于第1存放空间的第1填充率。象物相对于第1存放空间的第1填充率。象物相对于第1存放空间的第1填充率。
技术研发人员:桂右京 松延彻 杉尾敏康 一力知一 木村雅典
受保护的技术使用者:松下知识产权经营株式会社
技术研发日:2021.04.12
技术公布日:2022/12/2
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。