1.本实用新型涉及清洁设备技术领域,尤其涉及一种集尘效果好的清洁系统。
背景技术:
2.随着生活水平的提高,清洁机器人逐渐进入越来越多人的日常生活中。清洁机器人可以通过驱动轮自行移动,并利用清洁件和吸尘结构在移动过程中对待清洁面进行擦拭和除尘,实现清洁目的。由于吸尘结构中尘盒的容量较小,清洁机器人工作一段时间后需要用户手动清理尘盒,尘盒中的脏污在清理尘盒时容易洒落,尤其是脏污中的粉尘容易向外飘散,不利于提高用户的使用体验。基于此,一些产商在供清洁机器人停靠的基站内设置了集尘装置,在清洁机器人上设置与尘盒连通的对接口,集尘装置的集尘口与清洁机器人的对接口可拆卸对接配合,集尘口与对接口对接配合时,集尘装置的风机工作将尘盒中的脏污吸入体积较大的集尘箱中,用户无需清理尘盒,只需定期清理集尘箱即可,大大降低清理频率。但是,由于现有清洁机器人的尘盒上供脏污进入的进尘口、供吸尘气流流经的通风口及与对接口连通的排尘口设置不合理,尘盒内的脏污在对接集尘时不能经过排尘口有效的排离尘盒,即尘盒内部存在集尘死角,集尘效果不理想,不利于提高用户的使用体验。
技术实现要素:
3.为了解决上述现有技术中存在的缺点和不足,本实用新型提供了一种集尘效果好的清洁系统,合理设置尘盒上进尘口、通风口及排尘口的设置位置,消除尘盒的集尘死角,提高对尘盒的集尘效果。
4.为了实现上述技术目的,本实用新型提供的集尘效果好的清洁系统,包括清洁机器人及供清洁机器人停靠的基站,清洁机器人的内部设有吸尘组件、底侧设有吸尘口、侧壁设有对接口,吸尘组件包括尘盒及吸尘风机,基站设有集尘装置,集尘装置设有可与对接口对接配合的集尘口,尘盒设有连通于吸尘口的进尘口、与吸尘风机配合的通风口及连通于对接口的排尘口,所述进尘口与通风口分别设于尘盒的相邻两侧侧壁上,排尘口与通风口分别设于尘盒的相对两侧侧壁上,以使在清洁系统集尘时自进尘口和通风口分别流入尘盒内的两股集尘气流交汇后经排尘口流出。
5.优选的,所述排尘口低于通风口设置;和/或,所述排尘口的底侧低于进尘口的底侧设置。
6.优选的,所述尘盒的内底壁设有自通风口所在侧延伸至排尘口所在侧并用于引导集尘气流的引流面,引流面朝向通风口的一端高于朝向排尘口的一端。
7.优选的,所述引流面包括自通风口所在侧朝排尘口所在侧依次分布的第一斜面、过渡面及第二斜面,第一斜面自通风口所在侧朝排尘口所在侧斜向下延伸,第二斜面自排尘口所在侧朝通风口所在侧斜向下延伸,过渡面呈弧面且两端分别与第一斜面、第二斜面平滑相接。
8.优选的,所述进尘口位于第一斜面的跨度范围内;或者,所述进尘口位于第一斜面
与过渡面的跨度范围内。
9.优选的,所述第一斜面的倾斜角度为5
°
~20
°
;和/或,所述第二斜面的倾斜角度为不超过10
°
。
10.优选的,所述尘盒的外侧设有用于开闭排尘口的第一挡片,第一挡片转动连接于尘盒且可在集尘气流作用下打开排尘口。
11.优选的,所述尘盒设有通风口的侧壁设有进风口,尘盒的内侧设有用于开闭进风口的第二挡片,第二挡片转动连接于尘盒且可在集尘气流作用下打开进风口。
12.优选的,所述吸尘风机设有提供吸力的正转状态及提供吹力的反转状态,反转状态的吸尘风机经通风口向尘盒内送风。
13.优选的,所述尘盒的内侧设有用于开闭进尘口的挡板,挡板转动连接于尘盒且可在气流作用下打开进尘口,挡板的转动角度受限以引导气流向下流动和/或挡板在朝向进尘口的表面设有多条平行间隔分布的导流筋。
14.采用上述技术方案后,本实用新型具有如下优点:
15.1、本实用新型提供的清洁系统,将进尘口与通风口分别设于尘盒的相邻两侧侧壁上,将排尘口和通风口分别设于尘盒的相对两侧侧壁上,进尘口与通风口大致垂直设置,清洁系统进行集尘时,自进尘口和通风口分别流入尘盒内的两股集尘气流的流动方向也大致垂直,两股集尘气流交汇会形成涡旋气流,通过该涡旋气流可以有效消除尘盒内部的集尘死角,使尘盒中的脏污均能通过排尘口排离尘盒,避免自进尘口和通风口分别流入尘盒内的两股集尘气流对向流动导致集尘气流的强度有所减弱且导致尘盒内部存在集尘死角的缺陷,有效提高集尘装置对尘盒的集尘效果,有利于提高用户的使用体验。
16.2、排尘口优选的低于通风口设置,使自通风口处流入尘盒内的集尘气流在尘盒内部斜向下流动并进过排尘口流出尘盒。排尘口的底侧优选的低于进尘口的底侧设置,使自进尘口处流入尘盒内的集尘气流能向下流动后经排尘口流出尘盒。合理设置排尘口与通风口之间的高低位置关系及排尘口与进尘口之间的高低位置关系,使自进尘口和通风口流入尘盒内的两股气流能更好的带动尘盒内的脏污朝排尘口移动,从而使尘盒内的脏污均能通过排尘口排离尘盒。
17.3、尘盒的内底面设置引流面,引流面朝向通风口的一端高于朝向排尘口的一端,该引流面对尘盒内的集尘气流具有引导作用,集尘气流沿引流面流动能更好的带动尘盒内的脏污朝排尘口移动,尤其可以使重量较大的脏污颗粒沿引流面朝排尘口移动,有利于进一步提高对尘盒的集尘效果。
18.4、引流面优选采用三段式结构,第一斜面与第二斜面之间通过过渡面平滑相接,合理设置引流面的具体结构,使尘盒内的脏污可以在集尘气流的带动下沿引流面顺利朝排尘口移动,也能避免堵住排尘口,进一步提高对尘盒的集尘效果。
19.5、进尘口优选位于第一斜面的跨度范围内或位于第一斜面和过渡面的跨度范围内,使自进尘口流入尘盒内部的集尘气流在撞到尘盒内壁后可以沿第一斜面朝排尘口流动,从而使尘盒内部受该股集尘气流作用的脏污可以朝排尘口移动,避免尘盒内的脏污在该股集尘气流的作用下被顶在尘盒的顶部形成集尘死角的情况。
20.6、合理设置第一斜面的倾斜角度,保证尘盒容量的同时避免形成集尘死角。若第一斜面的倾斜角度大于20
°
,第一斜面的倾斜角度过大,尘盒的容量在不增大尘盒尺寸的前
提下明显减小,不利于满足工作要求。若第一斜面的倾斜角度小于5
°
,第一斜面的倾斜角度过小,第一斜面对集尘气流的引导作用不明显,尘盒内部容易存在集尘死角,不利于保证对尘盒的集尘效果。
21.合理设置第二斜面的倾斜角度,保证脏污能顺利朝排尘口移动。若第二斜面的倾斜角度大于10
°
,脏污沿第二斜面朝排尘口移动的速度明显降低,且容易存在集尘死角,不利于提高对尘盒的集尘效果。
22.7、尘盒的外侧设置用于开闭排尘口的第一挡片,清洁机器人工作吸尘时,第一挡片关闭排尘口,吸尘风机工作形成的吸尘气流只能通过进尘口流入尘盒内部,可以保证吸尘气流的强度,也能避免尘盒中的脏污经排尘口溢出尘盒并经对接口扬出清洁机器人的情况,有利于提高清洁机器人的吸尘效果。对接集尘时,第一挡片在集尘气流的作用下打开排尘口,使集尘气流可以经排尘口流出尘盒,从而使尘盒内的脏污可以在集尘气流的作用下排离尘盒。
23.8、尘盒设置与通风口位于同侧的进风口及用于开闭进风口的第二挡片,清洁机器人工作吸尘时,第二挡片关闭进风口,保证吸尘气流的强度,也能避免尘盒内的脏污经进风口溢出尘盒。对接集尘时,第二挡片在集尘气流的作用下打开进风口,自进风口处流入尘盒内部的集尘气流朝向位于对侧的排尘口流动,可以使尘盒内的脏污更好、更快的向排尘口移动,有利于进一步消除尘盒的集尘死角。
24.9、吸尘风机正转时提供吸力形成吸尘气流,使位于清洁机器人底部的脏污在吸尘气流的作用下被吸入尘盒中。吸尘风机反转时提供吹力经通风口向尘盒内送风,形成辅助集尘气流,可以有效提高集尘气流的强度,从而有利于提高对尘盒的集尘效果。
25.10、吸尘时,挡板在吸尘气流作用下转动打开进尘口,使脏污可以顺利进入尘盒中。集尘时,挡板在集尘气流作用下转动打开进尘口。挡板的转动角度受限,挡板在朝向进尘口的表面设置导流筋,通过限制挡板转动角度及设置导流筋引导经进尘口流入尘盒内的集尘气流向下朝尘盒的侧壁下端和底壁流动,对尘盒底部的脏污起到很好的推动作用,有利于消除尘盒的集尘死角。
附图说明
26.图1为实施例一清洁系统中清洁机器人停靠于基站时的侧视图;
27.图2为实施例一清洁系统中基站的前视图;
28.图3为实施例一清洁系统中基站的结构图;
29.图4为实施例一清洁系统中清洁机器人的结构示意图;
30.图5为实施例一清洁系统中吸尘组件的结构图;
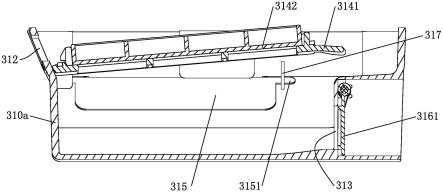
31.图6为实施例一清洁系统中尘盒的结构图;
32.图7为实施例一清洁系统中尘盒的盒体沿宽度方向的剖视图;
33.图8为实施例一清洁系统中尘盒的盒体的立体图;
34.图9为实施例一清洁系统中尘盒的部分结构沿长度方向的剖视图;
35.图10为实施例一清洁系统中尘盒的挡板的结构图;
36.图11为实施例二清洁系统中尘盒的部分结构沿长度方向的剖视图;
37.图12为实施例三清洁系统中尘盒的盒体的立体图。
38.图中,100-清洁机器人,110-凹腔,111-吸尘口,120-连通通道,200-基站,210-基站主体,220-清洗盘,221-清洗槽,230-停靠腔,300-吸尘组件,310-尘盒,310a-盒体,310b-盒盖,311-进尘口,312-通风口,313-排尘口,3141-支架,3142-海帕网,315-挡板,3151-铰接柱,3152-导流筋,3161-第一挡片,3162-第二挡片,317-凸块,318-引流面,318a-第一斜面,318b-第二斜面,318c-过渡面,319-进风口,320-吸尘风机,321-叶轮,322-蜗壳,322a-第一端部,322b-第二端部,330-对接管,331-对接口,400-集尘装置,410-集尘口,420-集尘箱,430-集尘风机,440-集尘管,450-集尘通道,510-滚刷,520-边刷,530-拖擦盘,610-净水箱,620-污水箱。
具体实施方式
39.下面结合附图和具体实施例对本实用新型作进一步说明。需要理解的是,下述的“上”、“下”、“左”、“右”、“纵向”、“横向”、“内”、“外”、“竖直”、“水平”、“顶”、“底”等指示方位或位置关系的词语仅基于附图所示的方位或位置关系,仅为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置/元件必须具有特定的方位或以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
40.实施例一
41.如图1至图10所示,本实用新型实施例一提供的一种集尘效果好的清洁系统,包括清洁机器人100及供清洁机器人100停靠的基站200。清洁机器人100的内部设有吸尘组件300、底侧设有吸尘口111、侧壁设有对接口331,吸尘组件300包括尘盒310及吸尘风机320,基站200设有集尘装置400,集尘装置400设有可与对接口331对接配合的集尘口410。尘盒310设有连通于吸尘口111的进尘口311、与吸尘风机320配合的通风口312及连通于对接口331的排尘口313,进尘口311与通风口312分别设于尘盒310的相邻两侧侧壁上,排尘口313与通风口312分别设于尘盒310的相对两侧侧壁上,以使在清洁系统集尘时自进尘口311和通风口312分别流入尘盒310内的两股集尘气流交汇后经排尘口313流出。
42.将排尘口和通风口分别设于尘盒的相对两侧侧壁上,进尘口与通风口大致垂直设置,清洁系统进行集尘时,自进尘口和通风口分别流入尘盒内的两股集尘气流的流动方向也大致垂直,两股集尘气流交汇会形成涡旋气流,通过该涡旋气流可以有效消除尘盒内部的集尘死角,使尘盒中的脏污均能通过排尘口排离尘盒,避免自进尘口和通风口分别流入尘盒内的两股集尘气流对向流动导致集尘气流的强度有所减弱且导致尘盒内部存在集尘死角的缺陷,有效提高集尘装置对尘盒的集尘效果,有利于提高用户的使用体验。
43.本实施例中,清洁机器人100底部的大致中间部位设有凹腔110,凹腔110内设有由滚刷电机驱动的滚刷510,滚刷510的轴向沿左右方向设置,清洁机器人100底部的前侧设有由边刷电机驱动的边刷520,边刷520优选的沿左右方向间隔设有两个。清洁机器人100底部的后侧设有由清洁电机驱动的拖擦盘530,拖擦盘530优选的沿左右方向间隔设有两个。凹腔110的底侧开口形成吸尘口111,清洁机器人100的内部设有用于连通凹腔110和进尘口311的连通通道120。
44.结合图6、图7、图8,尘盒310包括盒体310a及用于盖合盒体310a的盒盖310b,盒体310a大致呈四边形壳体状,进尘口311优选设于盒体310a其中一个长边侧壁上,通风口312和排尘口313分别设于盒体310a的两个短边侧壁上,且通风口312位于盒体310a朝向吸尘风
机320的一侧。尘盒310优选的可拆卸安装于清洁机器人100内部,连通通道120的一端与凹腔110连通、另一端与进尘口311可拆卸对接配合。吸尘风机320包括叶轮321及设于叶轮321外部的蜗壳322,蜗壳322设有第一端部322a和第二端部322b,第一端部322a与尘盒310的通风口312可拆卸对接配合,第二端部322b与清洁机器人100的侧壁对应,清洁机器人100的侧壁上设有与第二端部322b对应的出风口。吸尘风机320设有提供吸力的正转状态,吸尘风机320正转时提供吸力形成吸尘气流,吸尘气流自进尘口311处流入且经凹腔110、连通通道120和进尘口311流入尘盒310的内部,然后经通风口312流出尘盒310并经蜗壳322和出风口流出清洁机器人100,清洁机器人100底部位于吸尘口111附近的脏污在吸尘气流的作用下被吸入尘盒310中。
45.吸尘组件300还包括设于清洁机器人100内的对接管330,对接管330中空且两端敞口,对接管330的一端与尘盒310的排尘口313可拆卸对接配合、另一端延伸至清洁机器人100的侧壁,对接口331设于对接管330远离尘盒310的端部。
46.为了避免脏污进入吸尘风机320的内部,尘盒310内设有海帕网3142,海帕网3142通过支架3141可拆卸安装于盒体310a内,经进尘口311流入尘盒310内的吸尘气流经过海帕网3142的过滤后经通风口312流出尘盒310。本实施例中,进尘口311低于通风口312设置,海帕网3142通过支架3141安装于尘盒310内时,海帕网3142在高度方向上位于通风口312和进尘口311之间,使吸尘气流可以经过海帕网3142的有效过滤后经通风口312流出尘盒310。
47.结合图2、图3,基站200包括基站主体210及清洗盘200,清洗盘200可拆卸连接于基站主体210的底侧,基站主体210与清洗盘200之间设有位于清洗盘200后侧上方的停靠腔230,清洁机器人100停靠于基站200时,清洁机器人100的后部位于停靠腔230中。集尘装置400设于基站主体210内,集尘装置400包括集尘箱420、集尘风机430、集尘管440及集尘通道450,集尘箱420可拆卸安装于基站主体210内,集尘风机430可与集尘箱420对接配合,集尘管440伸出基站主体210并位于停靠腔230中,集尘通道450的一端与集尘管440的上端对接连通、另一端与集尘箱420可拆卸对接连通,集尘口410设于集尘管440伸入停靠腔230中的端部处。清洁机器人100返回基站200时,对接口331与集尘口410对接连通,集尘风机430工作时提供吸力形成集尘气流,集尘气流自通风口312和进尘口311流入尘盒310内部后经排尘口313流出尘盒310,然后经对接管330、集尘管440和集尘通道450流入集尘箱420内,尘盒310内的脏污在集尘气流的带动作用下被收集至集尘箱420中,实现清洁系统的集尘目的。
48.结合图9,为了使自进尘口311和通风口312流入尘盒310内的两股气流能更好的带动尘盒310内的脏污朝排尘口313移动,排尘口313优选的低于通风口312设置,且排尘口313的底侧优选的低于进尘口311的底侧设置。由于排尘口313低于通风口312且排尘口313的底侧低于进尘口311的底侧,自通风口312和进尘口311两处流入尘盒310内的集尘气流在尘盒310内部向下朝排尘口313流动,可以更好的带动尘盒310底壁上的脏污朝排尘口313移动,有利于提高集尘效果。
49.结合图7,尘盒310的内侧设有用于开闭进尘口311的挡板315,挡板315转动连接于盒体310a且可在气流作用下打开进尘口311。本实施例中,挡板315顶侧的两端设有向外凸出的铰接柱3151,盒体310a的内壁上设有凸块317,凸块317上设有供铰接柱3151插入的铰接孔,挡板315通过铰接柱3151与铰接孔的配合可上下转动的连接于盒体310a且位于盒体310a的内侧。吸尘或集尘时,挡板315受到气流的作用向上转动打开进尘口311,使气流可以
顺利流入尘盒310的内部。
50.结合图10,为了在集尘时利用挡板315引导集尘气流的流向,挡板315的转动角度受到限制,挡板315在朝向进尘口311的表面设有多条平行间隔分布的导流筋3152,通过限制挡板315的转动角度及设置导流筋3152引导经进尘口311流入尘盒310内的集尘气流向下朝尘盒310的侧壁下端和底壁流动,对尘盒310底部的脏污起到很好的推动作用,有利于消除尘盒310的集尘死角。本实施例中,挡板315的具体转动角度因气流的强度不同而有所不同,为了使挡板315满足引导集尘气流向下流动的要求,挡板315向上转动至与尘盒310的底壁平行时达到最大转动角度。导流筋3152相对于挡板315的长度方向倾斜设置,使集尘气流在导流筋3152的引导作用下可以朝通风口312所在侧的侧壁下端流动,更好的消除集尘死角。为了使挡板315能有效关闭进尘口311,挡板315关闭进尘口311时,导流筋3152的底端高于进尘口311的底侧设置,使挡板315在关闭进尘口311时可以与盒体310a的内壁贴合。
51.结合图9,为了避免尘盒310内的脏污在吸尘时经排尘口313溢出尘盒310,尘盒310的外侧设有用于开闭排尘口313的第一挡片3161,第一挡片3161转动连接于尘盒310且可在集尘气流的作用下打开排尘口313。本实施例中,第一挡片3161的顶侧铰接于盒体310a中设有排尘口313的侧壁上,第一挡片3161在吸尘时关闭排尘口313,第一挡片3161在集尘时向上转动打开排尘口313,使集尘气流可以经排尘口313流出尘盒310,从而使尘盒310内的脏污可以在集尘气流的作用下排离尘盒310。
52.清洁机器人100工作时,边刷电机驱动边刷520转动对待清洁面进行清扫,滚刷电机驱动滚刷510转动对待清洁面进行清扫,清洁电机驱动拖擦盘530转动对待清洁面进行擦拭,吸尘风机320正转提供吸力形成吸尘气流,清洁机器人100底部的脏污在吸尘气流的作用下被吸入尘盒310中。
53.清洁机器人100停靠于基站200时,清洁机器人100的后部位于停靠腔230中,集尘装置400的集尘口410与清洁机器人100侧壁上的对接口331对接连通,集尘风机430工作时提供吸力形成集尘气流,尘盒310内的脏污在集尘气流的作用下被收集至集尘箱420中,自通风口312处和进尘口311处分别流入尘盒310内的两股集尘气流大致垂直,两股集尘气流交汇后形成涡旋气流,通过该涡旋气流可以有效消除尘盒310的集尘死角,使尘盒310中的脏污均能通过排尘口313排离尘盒310而被收集至集尘箱420中。
54.本实施例中,清洗盘220设有位于停靠腔230下方用于清洗拖擦盘530的清洗槽221,基站主体210内还设有可拆卸安装的净水箱610和污水箱620。净水箱610可以向清洗槽221提供用于清洗拖擦盘530的清洗液,拖擦盘530清洗结束后,清洗槽221中的污液可以被抽送至污水箱620中。
55.可以理解的是,清洁机器人100底部的清洁结构并不局限于上述记载的滚刷510、边刷520和拖擦盘530,也可以采用其他合适的清洁构件或其他合理的布局。
56.可以理解的是,吸尘风机320的具体结构并不局限于上述记载和附图所示,也可以设置成其他合理的结构,如蜗壳322的第二端部322b与清洁机器人100的底壁对应,出风口设于清洁机器人100的底壁上等。
57.可以理解的是,集尘通道450可以由集尘管440形成。
58.可以理解的是,排尘口313的顶侧可以低于进尘口311的底侧设置,也可以高于进尘口311的底侧设置,还可以与进尘口311的底侧齐平设置。
59.可以理解的是,可以在盒体310a的内壁上设置限位凸起或限位筋等结构限制挡板315在气流作用下的最大转动角度,使挡板315的转动角度受到限制。
60.可以理解的是,挡板315转动至最大转动角度时也可以相对于盒体310a的底壁倾斜设置。
61.可以理解的是,导流筋3152的形状及分布方式并不局限于上述记载和附图所示,也可以设置成其他满足引导气流向尘盒310内的下部流动的合理形状及合理分布方式。
62.可以理解的是,在满足集尘要求的前提下,也可以取消挡板315上导流筋3152的设置。
63.可以理解的是,在满足吸尘要求的前提下,也可以取消第一挡片3161的设置。
64.实施例二
65.结合图11,本实施例中,尘盒310的内底面设有自通风口312所在侧延伸至排尘口313所在侧并用于引导气流的引流面318,引流面318朝向通风口312的一端高于朝向排尘口313的一端。集尘气流沿引流面318流动能更好的带动尘盒310内的脏污朝排尘口313移动,尤其可以使重量较大的脏污颗粒沿引流面318朝排尘口313移动,有利于进一步提高对尘盒310的集尘效果。
66.具体的,引流面318包括自通风口312所在侧朝排尘口313所在侧依次分布的第一斜面318a、过渡面318c及第二斜面318b,第一斜面318a自通风口312所在侧朝排尘口313所在侧斜向下延伸,第二斜面318b自排尘口313所在侧朝通风口312所在侧斜向下延伸,过渡面318c呈弧面且两端分别与第一斜面318a、第二斜面318b平滑相接。图11中虚线l1表示第一斜面318a与过渡面318c的相接处,虚线l2表示过渡面318c与第二斜面318b的相接处,过渡面318c的最低处优选的略低于第二斜面318b的底侧设置。
67.为了保证尘盒310容量的同时避免形成集尘死角,需合理设置第一斜面318a的倾斜角度,第一斜面318a的倾斜角度为5
°
~20
°
。为了保证脏污能顺利朝排尘口313移动,需合理设置第二斜面318b的倾斜角度,第二斜面318b的倾斜角度不超过10
°
。本实施例中,第一斜面318a的倾斜角度α优选设置为10
°
,第二斜面318b的倾斜角度β优选设置为2.5
°
。
68.为了提高自进尘口311处流入尘盒310内的集尘气流对尘盒310内脏污的推动作用,进尘口311优选位于第一斜面318a与过渡面318c的跨度范围内,使自进尘口311流入尘盒310内部的集尘气流在撞到尘盒310内壁后可以沿第一斜面318a朝排尘口313流动,从而使尘盒310内部受该股集尘气流作用的脏污可以朝排尘口313移动,避免尘盒310内的脏污在该股集尘气流的作用下被顶在尘盒310的顶部形成集尘死角的情况。具体的,结合图11,虚线l3所示的进尘口311左侧内壁所在平面与第一斜面318a相交,虚线l4所示的进尘口311右侧内壁所在平面与过渡面318c相交,以使进尘口311位于第一斜面318a与过渡面318c的跨度范围内。
69.实施例二的其他结构与实施例一相同,此处不再一一赘述。
70.可以理解的是,第一斜面318a的倾斜角度α也可以设置为5
°
、7
°
、9
°
、11
°
、13
°
、15
°
、17
°
、19
°
、20
°
等其他合理的大小。
71.可以理解的是,第二斜面318b的倾斜角度β也可以设置为0.5
°
、1
°
、1.5
°
、2
°
、3
°
、4
°
、5
°
、6
°
、7
°
、8
°
、9
°
、10
°
等其他合理的大小。
72.可以理解的是,在满足集尘要求的前提下,也可以采用与盒体310a外底面平行的
平面来代替第二斜面318b。
73.可以理解的是,引流面318的具体结构并不局限于上述记载和附图所示三段式结构,也可以设置成其他合理的结构,如弧形面等结构。
74.可以理解的是,进尘口311也可以只位于第一斜面318a的跨度范围内,即虚线l3所示的进尘口311左侧内壁所在平面及虚线l4所示的进尘口311右侧内壁所在平面均与第一斜面318a相交。
75.实施例三
76.结合图12,本实施例中,尘盒310设有通风口312的侧壁上还设有进风口319,尘盒310的内侧设有用于开闭进风口319的第二挡片3162,第二挡片3162转动连接于尘盒310且可在集尘气流的作用下打开进风口319。具体的,进风口319位于通风口312的下方,第二挡片3162的顶侧铰接于盒体310a。吸尘时,第二挡片3162在吸尘气流的风压作用下关闭进风口319,避免尘盒310内的脏污经进风口319溢出尘盒310。集尘时,第二挡片3162在集尘气流的作用下向上转动打开进风口319,自进风口319处流入尘盒310内部的集尘气流朝向位于对侧的排尘口313流动,可以使尘盒310内的脏污更好、更快的向排尘口313移动,有利于进一步消除尘盒310的集尘死角。
77.实施例三的其他结构与实施例一相同,此处不再一一赘述。
78.可以理解的是,进风口319的底侧优选的高于排尘口313的底侧设置。
79.可以理解的是,实施例三可以与实施例二结合。
80.实施例四
81.本实施例中,吸尘风机320还设有提供吹力的反转状态,反转状态的吸尘风机320经通风口312向尘盒310内送风,形成用于辅助集尘的辅助集尘气流,可以有效提高集尘气流的强度,从而有利于提高对尘盒310的集尘效果。
82.实施例四的其他结构与实施例一相同,此处不再一一赘述。
83.可以理解的是,实施例四可以与实施例二结合。
84.可以理解的是,实施例四可以与实施例三结合。
85.除上述优选实施例外,本实用新型还有其他的实施方式,本领域技术人员可以根据本实用新型作出各种改变和变形,只要不脱离本实用新型的精神,均应属于本实用新型权利要求书中所定义的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
