1.本发明设计冲牙器领域,特别是涉及一种可出入口腔自动识别的冲牙器。
背景技术:
2.冲牙器是一种清洁口腔的辅助性工具,利用脉冲水流冲击的方式来清洁牙齿、牙缝的一种工具,适合多个家庭成员共同使用。
3.传统冲牙器使用的时候,手指需放在开关键上,冲牙器喷头放入口腔冲后,按下开关键,开启喷水冲牙,口腔冲牙结束后,需先按下开关键停止喷水,然后移出喷头,以防乱喷水或者喷水损伤眼睛,整体使用上都需要手工调节喷水的开关动作,冲牙过程非常不连贯,而且针对家庭成员儿童的时候,因为是人工调节喷水开关,儿童的自控能力、安全意识较差的情况下,更容易出现因操作失误或者玩闹造成喷水损伤眼睛的可能。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种可出入口腔自动识别的冲牙器,用于解决现有技术中以上技术问题。
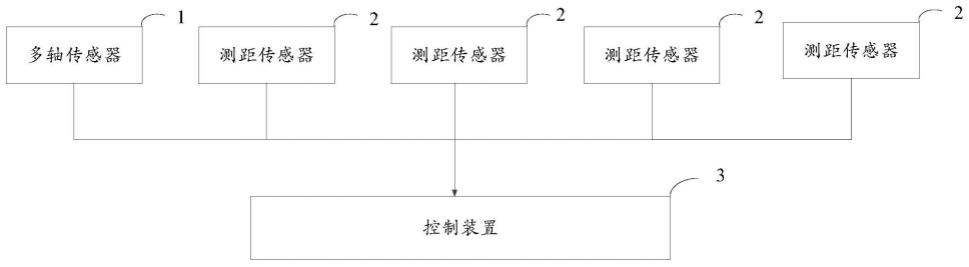
5.为实现上述目的及其他相关目的,本发明提供一种可出入口腔自动识别的冲牙器,所述系统包括:至少一个多轴传感器,用于采集冲牙器喷嘴的当前位姿数据;多个测距传感器;每个测距传感器用于测量所述冲牙器喷嘴与人体嘴唇之间的间距数据;控制装置,连接多轴传感器以及测距传感器,用于根据接收到的所述当前姿态数据以及各间距数据判断冲牙器是否需要启动或关闭,并根据判断结果控制冲牙器喷水的自动启闭。
6.于本发明的一实施例中,所述控制装置包括:数据储存模块,用于储存启动阈值数据组以及关闭阈值数据组;其中,所述启动阈值数据组包括对应多个姿态下的启动距离阈值;所述关闭阈值数据组包括对应多个姿态下的关闭距离阈值;处理模块,连接所述数据储存模块,用于基于所述启动阈值数据组以及关闭数阈值据组,根据各当前姿态数据以及各距离数据进行冲牙器入口腔启闭以及出口腔启闭的自动识别,以获得识别结果;启闭控制模块,连接所述处理模块,用于根据所述识别结果生成对应的开启信号或关闭信号,以供控制冲牙器喷水的启闭。
7.于本发明的一实施例中,所述处理模块包括:姿态识别单元,用于根据所述当前位姿数据识别其所对应的当前姿态;距离阈值匹配单元,连接所述姿态识别单元,用于根据所述当前姿态在启动阈值数据组以及关闭阈值数据组中匹配与所述当前姿态所对应的启动距离阈值或关闭距离阈值;入口腔识别单元,连接所述距离阈值匹配单元,用于在匹配到启动距离阈值时,根据该启动距离阈值以及各间距数据进行入口腔自动识别,以获得入口腔自动识别结果;出口腔识别单元,连接所述距离阈值匹配单元,用于在匹配到关闭距离阈值时,根据该关闭距离阈值以及各间距数据进行入口腔自动识别,以获得出口腔自动识别结果。
8.于本发明的一实施例中,所述启闭控制模块用于当入口腔自动识别结果对应为入
口腔状态时且在基于多轴传感器的当前位姿数据判断所述多轴传感器为持续的相对静止状态时,则生成所述开启信号;当出口腔自动识别结果对应为出口腔状态时,则生成所述关闭信号。
9.于本发明的一实施例中,所述入口腔识别单元包括:入口腔识别判断子单元,用于将比较各间距数据获得最小的间距数据与所述启动距离阈值比较,若两者差值在启动距离误差范围内,则生成对应为入口腔状态的入口腔自动识别结果。
10.于本发明的一实施例中,所述出口腔识别单元包括:出口腔识别判断子单元,用于将比较各间距数据获得最小的间距数据与所述关闭距离阈值比较,若两者差值在启动距离误差范围内,则生成对应为出口腔状态的出口腔自动识别结果。
11.于本发明的一实施例中,所述控制装置还包括:开机控制模块,用于在接收到来自由多轴传感器采集的符合唤醒位姿条件的当前位姿数据时发送用于控制开机的开机信号,并令各测距传感器启动测量喷嘴与人体嘴唇之间的间距数据。
12.于本发明的一实施例中,各测距传感器对称设置于冲牙器喷嘴与冲牙器头部连接处附近;所述多轴传感器设于所述冲牙器头部。
13.于本发明的一实施例中,所述多轴传感器为至少六轴传感器。
14.于本发明的一实施例中,所述关闭阈值数据组还包括:减速阈值数据组,用于在所述当前姿态匹配到所述减速阈值数据组且各间距数据中最小的间距数据落入该减速阈值数据组时,控制冲牙器喷水减速
15.如上所述,本发明是一种可出入口腔自动识别的冲牙器,具有以下有益效果:本发明通过多轴传感器采集冲牙器喷嘴的当前位姿数据,通过测距传感器测量所述冲牙器喷嘴与人体嘴唇之间的间距数据,再通过控制装置根据接收到的所述当前姿态数据以及各间距数据进行冲牙器出入口腔自动识别,以供控制冲牙器喷水的自动启闭。本发明实现了对冲牙器的自动启停,提高实时响应性,保证喷头出入口腔的情况下,能实时响应启动喷水和停止喷水,可避免使用者尤其是儿童使用冲牙器时错误的操作造成人身伤害的情况。
附图说明
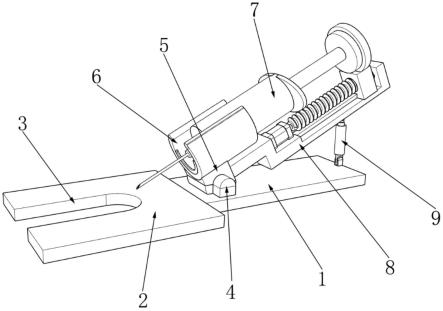
16.图1显示为本发明一实施例中的可出入口腔自动识别的冲牙器的结构示意图。
17.图2显示为本发明一实施例中的可出入口腔自动识别的冲牙器示意图。
18.图3显示为本发明一实施例中的入口腔自动识别方法的流程示意图。
19.图4显示为本发明一实施例中的出口腔自动识别方法的流程示意图。
具体实施方式
20.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
21.需要说明的是,在下述描述中,参考附图,附图描述了本发明的若干实施例。应当理解,还可使用其他实施例,并且可以在不背离本发明的精神和范围的情况下进行机械组
成、结构、电气以及操作上的改变。下面的详细描述不应该被认为是限制性的,并且本发明的实施例的范围仅由公布的专利的权利要求书所限定。这里使用的术语仅是为了描述特定实施例,而并非旨在限制本发明。空间相关的术语,例如“上”、“下”、“左”、“右”、“下面”、“下方”、“下部”、“上方”、“上部”等,可在文中使用以便于说明图中所示的一个元件或特征与另一元件或特征的关系。
22.在通篇说明书中,当说某部分与另一部分“连接”时,这不仅包括“直接连接”的情形,也包括在其中间把其它元件置于其间而“间接连接”的情形。另外,当说某种部分“包括”某种构成要素时,只要没有特别相反的记载,则并非将其它构成要素,排除在外,而是意味着可以还包括其它构成要素。
23.其中提到的第一、第二及第三等术语是为了说明多样的部分、成分、区域、层及/或段而使用的,但并非限定于此。这些术语只用于把某部分、成分、区域、层或段区别于其它部分、成分、区域、层或段。因此,以下叙述的第一部分、成分、区域、层或段在不超出本发明范围的范围内,可以言及到第二部分、成分、区域、层或段。
24.再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文中有相反的指示。应当进一步理解,术语“包含”、“包括”表明存在所述的特征、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、操作、元件、组件、项目、种类、和/或组的存在、出现或添加。此处使用的术语“或”和“和/或”被解释为包括性的,或意味着任一个或任何组合。因此,“a、b或c”或者“a、b和/或c”意味着“以下任一个:a;b;c;a和b;a和c;b和c;a、b和c”。仅当元件、功能或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
25.本发明提供一种可出入口腔自动识别的冲牙器,通过多轴传感器采集冲牙器喷嘴的当前位姿数据,通过测距传感器测量所述冲牙器喷嘴与人体嘴唇之间的间距数据,再通过控制装置根据接收到的所述当前姿态数据以及各间距数据进行冲牙器出入口腔自动识别,以供控制冲牙器喷水的自动启闭。本发明实现了对冲牙器的自动启停,提高实时响应性,保证喷头出入口腔的情况下,能实时响应启动喷水和停止喷水,可避免使用者尤其是儿童使用冲牙器时错误的操作造成人身伤害的情况。
26.下面以附图为参考,针对本发明的实施例进行详细说明,以便本发明所述技术领域的技术人员能够容易地实施。本发明可以以多种不同形态体现,并不限于此处说明的实施例。
27.如图1展示本发明实施例中的一种可出入口腔自动识别的冲牙器的结构示意图。
28.所述冲牙器包括:
29.至少一个多轴传感器1(图中仅以1个为例),用于采集冲牙器喷嘴的当前位姿数据;
30.多个测距传感器2(图中仅以4个为例);每个测距传感器用于测量对应当前测距传感器所对应的所述冲牙器喷嘴与人体嘴唇之间的间距数据;
31.控制装置3,连接各多轴传感器1以及各测距传感器2,用于根据接收到的所述当前姿态数据以及各间距数据进行冲牙器出入口腔自动识别,以供控制冲牙器喷水的自动启闭。
32.在一实施例中,如图2所示,所述冲牙器包括:冲牙器手柄、冲牙器头部以及冲牙器
喷嘴,其中,所述冲牙器手柄与冲牙器头部连接,冲牙器头部与冲牙器喷嘴连接;
33.在一具体实施例中,多轴传感器1以及测距传感器2均设于所述冲牙器头部。
34.在一实施例中,若多轴传感器为一个,其采集的当前位姿数据为冲牙器喷嘴的当前位姿数据,若多轴传感器为多个,各自采集的当前位姿数据共同获得冲牙器喷嘴的当前位姿数据。
35.在一具体实施例中,各测距传感器2对称设置于冲牙器喷嘴与冲牙器头部连接处附近。
36.在一具体实施例中,所述多轴传感器1为至少六轴传感器。举例来说,可以为六轴传感器、九轴传感器以及十二轴传感器等至少六轴传感器,其中六轴传感器通常指的是三轴陀螺仪 三轴加速度计;九轴传感器通常指的是三轴陀螺仪 三轴加速度计 三轴地磁计,也有六轴加速度传感器 三轴陀螺仪的,也有六轴陀螺仪 三轴加速度计的。九轴传感器作为集成化传感器模块,减少了电路板和整体空间,更适合用在轻巧便携的电子设备和可穿戴产品中。
37.其中,三轴陀螺仪:同时测定6个方向的位置,移动轨迹,加速度。单轴的只能测量两个方向的量,也就是一个系统需要三个陀螺仪,而3轴的一个就能替代三个单轴的。优点:三轴陀螺仪体积小、重量轻、结构简单、可靠性好、更灵敏、更准确。三轴地磁计,又称电子罗盘,在无人机、智能手表、导航设备中广泛普及和应用。针对需要侦测物体运动变化情况,三轴磁传感器承载着至关重要的绝对指向作用,为稳定飞行、辅助导航等多样化功能保驾护航。也正如此,三轴磁传感器的可靠性是这些装置稳定运作的基石。三轴加速度计是基于加速度的基本原理去实现工作的,加速度是个空间矢量,一方面,要准确了解物体的运动状态,必须测得其三个坐标轴上的分量;另一方面,在预先不知道物体运动方向的场合下,只有应用三轴加速度传感器来检测加速度信号。由于三轴加速度传感器也是基于重力原理的,因此用三轴加速度传感器可以实现双轴正负90度或双轴0-360度的倾角,通过校正后期精度要高于双轴加速度传感器大于测量角度为60度的情况。优点:三轴加速度传感器的好处就是在预先不知道物体运动方向的场合下,只有应用三维加速度传感器来检测加速度信号。三维加速度传感器具有体积小和重量轻特点,可以测量空间加速度,能够全面准确反映物体的运动性质。
38.在一实施例中,所述测距传感器可以采用超声波测距传感器、激光测距传感器、红外线测距传感器以及24ghz雷达传感器。
39.在一实施例中,所述控制装置包括:
40.数据储存模块,用于储存启动阈值数据组以及关闭数阈值据组;其中,所述启动阈值数据组包括对应多个姿态下的启动距离阈值;所述关闭数阈值据组包括:所述启动阈值数据组包括对应多个姿态下的关闭距离阈值;举例来说,启动阈值数据组包含p个阈值数据,p≥1,p个阈值分别为p个姿态下喷嘴与人体嘴唇之间的间距值,关闭阈值数据组包含q个阈值数据,q≥1,q个阈值分别为q个姿态下喷嘴与人体嘴唇之间的间距。
41.处理模块,连接所述数据储存模块,用于基于所述启动阈值数据组以及关闭数阈值据组,根据各当前姿态数据以及各距离数据进行冲牙器出入口腔自动识别,以获得识别结果;
42.启闭控制模块,连接所述处理模块,用于根据所述识别结果生成对应的开启信号
或关闭信号,以供控制冲牙器喷水的启闭。
43.需要说明是,根据需求设定姿态的类型,可以为在一定位姿数据范围内对应的宽泛的类型也可以为对应每个位姿数据对应的细化类型。例如,姿态包括:向上伸入、向下伸入或垂直伸入。
44.在一实施例中,所述处理模块包括:
45.姿态识别单元,用于根据所述当前位姿数据识别其所对应的当前姿态;
46.距离阈值匹配单元,连接所述姿态识别单元,用于根据所述当前姿态在启动阈值数据组以及关闭阈值数据组中匹配与所述当前姿态所对应的启动距离阈值或关闭距离阈值;
47.入口腔识别单元,连接所述距离阈值匹配单元,用于在匹配到启动距离阈值时,根据该启动距离阈值以及各间距数据进行入口腔自动识别,以获得入口腔自动识别结果;
48.出口腔识别单元,连接所述距离阈值匹配单元,用于在匹配到关闭距离阈值时,根据该关闭距离阈值以及各间距数据进行入口腔自动识别,以获得出口腔自动识别结果。
49.在一具体实施例中,入口自动识别的方式包括:冲牙器进入口腔前,手持冲牙器,喷嘴向口腔移动,各测距传感器分别实时对喷嘴末端到人体嘴唇之间的间距进行测距,若有测距传感器的间距数据超过一阈值范围,则多轴传感器采集冲牙器喷嘴的当前位姿数据,通过姿态识别单元根据所述当前位姿数据识别其所对应的当前姿态,并通过入口腔识别单元根据与该姿态所匹配的启动距离阈值以及各间距数据进行入口腔自动识别,以获得入口腔自动识别结果;
50.更进一步,所述入口腔识别单元包括:
51.入口腔识别判断子单元,用于将比较各间距数据获得最小的间距数据与所述启动距离阈值比较,若两者差值在启动距离误差范围内,则生成对应为入口腔状态的入口腔自动识别结果。优选的,启动距离误差范围内为
±
5%范围内。
52.在一实施例中,出口自动识别的方式包括:冲牙器进入口腔后,手持冲牙器,喷嘴向口腔外移动,若有测距传感器的间距数据超过一出口阈值范围,则多轴传感器采集冲牙器喷嘴的当前位姿数据,通过姿态识别单元根据所述当前位姿数据识别其所对应的当前姿态;并通过出口腔识别单元根据与所述姿态所匹配的关闭距离阈值以及各间距数据进行入口腔自动识别,以获得出口腔自动识别结果。
53.更进一步,所述所述出口腔识别单元包括:
54.出口腔识别判断子单元,用于将比较各间距数据获得最小的间距数据与所述关闭距离阈值比较,若两者差值在关闭距离误差范围内,则生成对应为出口腔状态的出口腔自动识别结果。优选的,关闭距离误差范围为
±
5%范围内。
55.在一实施例中,所述启闭控制模块用于当入口腔自动识别结果对应为入口腔状态时且在基于多轴传感器的当前位姿数据判断所述多轴传感器为相对静止状态时,则生成所述开启信号;当出口腔自动识别结果对应为出口腔状态时,则生成所述关闭信号。
56.需要说明的是,判断所述多轴传感器为相对静止状态的方式为:
57.若多轴传感器的当前位姿数据在一定时间阈值内,在不超过一定范围内变化或不动,则判断为相对静止状态;若超过一定范围内变化,则判断为非相对静止状态。
58.在一实施例中,所述控制装置还包括:
59.开机控制模块,用于在接收到来自由多轴传感器采集的符合唤醒位姿条件的当前位姿数据时发送用于控制开机的开机信号,并令各测距传感器启动测量喷嘴与人体嘴唇之间的间距数据。
60.该方式主要应用于冲牙器还未开机的状态,根据根据多轴传感器设置的运动阈值判断是否符合唤醒位姿条件,若符合所述开机控制模块,发送用于控制开机的开机信号,并令各测距传感器启动测量喷嘴与人体嘴唇之间的间距数据。
61.在一实施例中,所述关闭阈值数据组还包括:减速阈值数据组,用于在所述当前姿态匹配到所述减速阈值数据组且各间距数据中最小的间距数据落入该减速阈值数据组时,控制冲牙器喷水减速。
62.具体的,所述控制装置根据所述当前姿态在关闭阈值数据组中匹配与所述当前姿态所对应的减速阈值数据组,判断各间距数据获得最小的间距数据是否落入所述减速阈值数据组,在达到这一距离范围时先减速减小冲牙器出水冲击力。
63.为了更好的说明上述可出入口腔自动识别的冲牙器,本发明提供以下具体实施例。
64.实施例1:可出入口腔自动识别的冲牙器;其包括:
65.冲牙器的机身上设置有n个多轴传感器以及m个测距传感器,n≥1,m≥2;
66.冲牙器包括控制系统,控制系统中包括数据单元、处理单元和控制单元,其中:
67.所述数据单元中包含用于判断冲牙器启闭的距离阈值数据组,距离阈值数据组包括启动阈值数据组合关闭数阈值据组,启动阈值数据组包含p个阈值数据,p≥1,p个阈值分别为p个冲牙姿态下喷嘴与人体嘴唇之间的间距值,关闭阈值数据组包含q个阈值数据,q≥1,q个阈值分别为q个冲牙姿态下喷嘴与人体嘴唇之间的间距;所述处理单元用于比较m个测距传感器测量到的喷嘴与人体嘴唇之间的间距大小,并将较小的数据测量到的间距值与数据单元中对应姿态下的距离阈值阈值数据作比较;所述控制单元用于控制冲牙器的启闭;
68.采用上述冲牙器进行自动识别方法具体为:
69.自动识别方法具体为:
70.入口自动识别方法:如图3所示,首先根据多轴传感器设置的运动阈值,中断唤醒冲牙器,等同于冲牙器开机。如果已手动按键开机,可直接忽略当前步骤;冲牙器进入口腔前,手持冲牙器,喷嘴向口腔移动,m个测距传感器分别实时对喷嘴末端到人体嘴唇之间的间距进行测距,同时,多轴传感器实时检测喷嘴的角度姿态,通过处理单元判断出哪个测距传感器距离人体嘴唇最近,以此测距传感器检测到的数据为有效数据,结合当前多轴传感器检测到的位姿信息,判断在该位姿下有效测距传感器检测的间距信息是否与对应启动阈值数据相匹配,误差在
±
a%范围内时,控制单元控制冲牙器开启,a优选等于5;
71.出口自动识别方法:如图4所示,冲牙器喷嘴入口后,m个测距传感器分别实时对喷嘴末端到人体嘴唇之间的间距进行测距,同时,多轴传感器实时检测喷嘴的角度姿态,通过处理单元判断出哪个测距传感器距离人体嘴唇最近,以此测距传感器检测到的数据为有效数据,结合当前多轴传感器检测到的位姿信息,判断在该位姿下有效测距传感器检测的间距信息是否与对应关闭阈值数据相匹配,误差在
±
b%范围内时,控制单元控制冲牙器关闭,b优选等于5。
72.本实施例中通过冲牙器头部的多轴传感器,判断当前冲牙器角度姿态下,哪个测距传感器为主要判断依据,并根据角度姿态实时调整判断出入口腔的测距阈值;如果满足入口腔测距阈值条件,多轴传感器已处于静态状态(喷头放入口腔并相对静止),冲牙器开始喷水;如果已在喷水的情况下,重复第二点,切换至出口腔阈值判断,如果满足条件,冲牙器立即停止喷水;即:实时采样多轴传感器的角度姿态来调整测距传感器的出入口腔阈值,在不同姿态下,调整对人脸不同的测距阈值,提高实时响应性,保证喷头出入口腔的情况下,能实时响应启动喷水和停止喷水。
73.综上所述,本发明的可出入口腔自动识别的冲牙器,通过多轴传感器采集冲牙器喷嘴的当前位姿数据,通过测距传感器测量所述冲牙器喷嘴与人体嘴唇之间的间距数据,再通过控制装置根据接收到的所述当前姿态数据以及各间距数据进行冲牙器出入口腔自动识别,以供控制冲牙器喷水的自动启闭。本发明实现了对冲牙器的自动启停,提高实时响应性,保证喷头出入口腔的情况下,能实时响应启动喷水和停止喷水,可避免使用者尤其是儿童使用冲牙器时错误的操作造成人身伤害的情况。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
74.上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,但凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。