1.本公开涉及将与监视对象物的状态相关的状态数据通过无线发送至母机终端的子机终端以及无线发送方法、以及用于将该子机终端作为监视对象物的家畜而具备的用于监视家畜的身体状况的监视系统。
背景技术:
2.以往,作为这种子机终端,公知有定期地向母机终端无线发送数据的终端(例如,参照专利文献1)。
3.在先技术文献
4.专利文献
5.专利文献1:jp专利第4552813号公报(第[0075]段及图4)
技术实现要素:
[0006]-发明所要解决的课题-[0007]
然而,在现有的子机终端中,产生以下等问题:为了避免在针对一个母机终端而使用了多个子机终端的情况下的干扰的设定需要时间和精力,或者为了避免干扰而重复进行无线发送,消耗电力增加。因而,在本公开中,提供一种较之以往不需要时间和精力且能够以较少的消耗电力避免干扰的技术。
[0008]-用于解决课题的手段-[0009]
为了解决上述课题而完成的本公开的第一方式所涉及的子机终端具备:数据发送部,按每个固定期间接受发送触发,并通过无线向监视装置发送与监视对象物的状态相关的状态数据;回复判别部,判别针对所述状态数据的发送的来自所述监视装置的ack信号的回复的有无;调整值运算部,在所述回复判别部判别为无回复的情况下,将调整期间决定为随机的长度;定时更新部,在所述回复判别部判别为无回复的情况下,经过所述调整期间后输出测量开始触发,在所述回复判别部判别为有回复的情况下,不隔着所述调整期间地输出所述测量开始触发;以及触发生成部,若接受所述测量开始触发,则测量所述固定期间并输出所述发送触发。
[0010]
本公开的第二方式所涉及的子机终端具备:数据发送部,按每个固定期间接受发送触发,通过无线向监视装置发送与监视对象物的状态相关的状态数据;回复判别部,判别针对所述状态数据的发送的来自所述监视装置的ack信号的回复的有无;调整值运算部,在所述回复判别部判别为无回复的情况下,将调整期间决定为随机的长度;触发生成部,按每个所述固定期间依次生成所述发送触发;以及定时更新部,设置于所述触发生成部,在所述回复判别部判别为无回复的情况下,使在此之后依次生成的所述发送触发的生成定时从现状的所述发送触发的生成定时起偏移所述调整期间。
[0011]
本公开的第三方式所涉及的无线发送方法,按每个固定期间将与监视对象物的状态相关的状态数据从子机终端无线发送至监视装置,在所述无线发送方法中,在所述子机
终端针对所述状态数据的发送而从所述监视装置接受了ack信号的情况下,将自此以后的每个所述固定期间的所述状态数据的发送定时设为现状的相同的发送定时,在未接受所述ack信号的情况下,将自此以后的每个所述固定期间的所述状态数据的发送定时更新为相对于现状的发送定时偏移随机决定的调整期间的发送定时。
附图说明
[0012]
图1是表示本发明的一实施方式所涉及的监视系统的整体结构的概略图。
[0013]
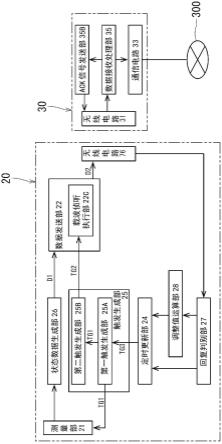
图2是表示子机终端及母机终端的电气结构的框图。
[0014]
图3是表示子机终端及母机终端的控制性结构的框图。
[0015]
图4是表示触发的生成定时的时序图。
[0016]
图5是第一控制程序的流程图。
[0017]
图6是第二控制程序的流程图。
[0018]
图7是表示第二实施方式所涉及的子机终端及母机终端的控制性结构的框图。
[0019]
图8是表示触发的生成定时的时序图。
[0020]
图9是第一v控制程序的流程图。
[0021]
图10是第二v控制程序的流程图。
具体实施方式
[0022]
[第一实施方式]
[0023]
参照图1~图6,对本公开的监视系统100所涉及的第一实施方式进行说明。图1所示的本实施方式的监视系统100具备:多个子机终端20,被留置在成为监视对象物的多头牛10的胃袋10s(具体地说,第一胃或者第二胃)内;母机终端30;以及云服务器50。这些构件经由包括无线基站400、401的通信网络101而被连接,用母机终端30接收从多个子机终端20通过无线发送来的与牛10的状态相关的数据并汇集到云服务器50。另外,母机终端30以及云服务器50相当于权利要求的“监视装置”。
[0024]
如图2所示那样,子机终端20将压力传感器70、电路基板71及电池72等收纳于防水外壳73而具备。此外,压力传感器70的受压面露出于防水外壳73的外部,通过构成为包括压力传感器70和测量电路74的测量部21,对作为牛10的状态的之一的胃袋10s内的压力进行测量。
[0025]
在电路基板71安装有振荡电路75、无线电路76及控制电路77等。振荡电路75具备振荡器,以作为主要部位,对无线电路76及控制电路77赋予作为无线的载波、时间测量的基础的周期信号。无线电路76进行无线信号的发送和接收,例如具有被印刷在电路基板71的线圈天线即天线29。控制电路77具备构成为包括cpu23a、rom23b、ram23c的微机23,以作为主要部位。在rom23b中存储有按各子机终端20分别设定的识别编号和后述的第一及第二控制程序pg1、pg2(参照图5、6)等。而且,cpu23a以给定周期反复执行第一及第二控制程序pg1、pg2,由此作为图3的数据发送部22、触发生成部25等控制块而发挥功能。
[0026]
子机终端20的测量部21测量出的压力数据通过无线电路76而被无线发送,并由母机终端30接收。母机终端30具备作为中继基站的功能和协议转换的功能,例如设置于饲养多头牛10的牲口棚、牧场。而且,母机终端30经由通用通信线路300将来自子机终端20的发
送数据向云服务器50发送。云服务器50例如对从多个子机终端20发送来的压力数据进行比较来判别发送了异常的压力数据的子机终端20,并通知给畜牧业者等拥有的用户终端60(参照图1)。在本实施方式中,一个母机终端30与一个云服务器50连接,但例如也可以按每个牲口棚、牧场来设置母机终端30,多个母机终端30与一个云服务器50连接。
[0027]
母机终端30具有无线电路31、控制电路32、通信电路33以及振荡电路34。此外,在控制电路32中包含cpu32a、rom32b、ram32c,通过执行rom32b所存储的给定的未图示的控制程序,从而作为图3的数据接收处理部35a、ack信号发送部35b等控制块发挥功能。另外,在rom32b中还存储有母机终端30的识别编号。
[0028]
具体地说,图3所示出的子机终端20的触发生成部25具有第一触发生成部25a和第二触发生成部25b。第一触发生成部25a生成第一触发tg1并赋予测量部21。由定时更新部24来设定第一触发tg1的生成定时。具体地说,若从定时更新部24接受测量开始触发tg3,则第一触发生成部25a在经过固定期间t4(例如,10分钟)后,生成第一触发tg1。于是,测量部21测量牛10的胃袋10s内的压力,状态数据生成部26根据该测量结果来生成状态数据d1并赋予数据发送部22。
[0029]
数据发送部22在预先决定的数据长度的数据帧中保存子机终端20的识别编号和压力数据来生成发送数据d2。而且,每当生成第一触发tg1,第二触发生成部25b依次生成从第一触发tg1向后偏移了给定延迟时间δt1的发送触发tg2,使用无线电路76对发送数据d2进行无线发送。给定延迟时间δt1用来确保状态数据生成部26生成发送数据d2的时间,在本实施方式中,给定时间被设定为0.6秒。以下,数据发送部22使用无线电路76对发送数据d2进行无线发送,由此数据发送部22将发送数据d2发送。
[0030]
此外,若通过数据发送部22将发送数据d2发送,则回复判别部27判别是否在经过待机时间δt2之前由无线电路76从母机终端30接收到ack信号的回复。以下,将其简称为回复判别部27判别是否有ack信号的回复。另外,在本实施方式中,待机时间δt2例如被设定为3[秒]。
[0031]
母机终端30的数据接收处理部35a对来自母机终端30的无线电路31接收到的各子机终端20的发送数据附加接收时刻并发送至云服务器50。此外,数据接收处理部35a取出各子机终端20的发送数据所包含的子机终端20的识别编号并赋予ack信号发送部35b。于是,ack信号发送部35b将子机终端20的识别编号和母机终端30的识别编号保存于预先设定的数据帧中,生成ack信号,并通过无线电路31进行无线发送。由此,各子机终端20的回复判别部27能够根据是否接收到包含自信的识别编号的ack信号来判别发送数据d2是否已被母机终端30接收。
[0032]
在回复判别部27判断为没有ack信号的回复的情况下,调整值运算部28将调整期间rt决定为随机的长度。调整期间rt用来在母机终端30的接收时产生了干扰的情况下偏移发送定时。而且,此后,定时更新部24在判断为ack信号的无回复后,在经过调整期间rt之后,生成测量开始触发tg3,并赋予第一触发生成部25a。而且,如上所述,第一触发生成部25在从接受测量开始触发tg3起经过固定期间t4后生成第一触发tg1。
[0033]
此外,在回复判别部27判断为有ack信号的回复的情况下,调整值运算部28将调整期间rt设定为“0”。此时,定时更新部24在判断为有ack信号的回复后,立刻生成测量开始触发tg3,并赋予第一触发生成部25a。换句话说,在母机终端30的接收时产生了干扰的情况
下,第一触发生成部25a的第一触发tg1的生成定时相比于未产生干扰的情况,而推迟了调整期间rt。
[0034]
而且,生成第一触发tg1并经过给定延迟时间δt1后,在发送了下一发送数据d2时也同样地,在回复判别部27判断为没有ack信号的回复的情况下,调整值运算部28重新将调整期间rt决定为随机的长度。而且,此后定时更新部24对第一触发生成部25a赋予的测量开始触发tg3的生成定时推迟了新的调整期间rt。
[0035]
如此,本实施方式的子机终端20在相对于发送数据d2的发送没有ack信号的回复的情况下,通过将接下来的测量部21进行的测量的定时向后偏移,从而将发送数据d2的发送定时偏移,在有ack信号的回复之前都反复进行这种变更。由此,即便针对多个子机终端20未设定成预先发送定时偏离,全部子机终端20也会逐渐被调度为在反复发送的期间内彼此的发送定时未重叠。
[0036]
在图4中概念性地表示上述各触发的生成定时等。在此,在图4中,tg1表示第一触发tg1的生成定时,tg2表示发送触发tg2的生成定时,tg3表示测量开始触发的生成定时。此外,h1表示数据发送部22将发送数据d2发送的发送定时。以下,参照图4来详述上述调整值运算部28及数据发送部22。
[0037]
调整值运算部28在从发送数据d2的发送结束起经过待机时间δt2后,将调整期间rt决定为在给定最大振幅t2的范围内以给定分配长度t3的单位随机分散。在本实施方式中,给定最大振幅t2被设定为相当于固定期间t4(例如,10[分钟])的例如1/10的1[分钟],给定分配长度t3被设定为0.6[秒]。换句话说,调整值运算部28从100(=1分钟/0.6秒)个随机数中决定一个随机数,将其乘以给定分配长度t3即0.6所得的值决定为调整期间rt。此外,在本实施方式中,数据发送部22进行了无线发送时的发送数据d2的数据长度(换句话说,数据帧的数据长度),例如被设定为0.37[秒]。
[0038]
另外,作为从100个中决定任意的随机数的一具体示例,例如,通过向后述的第二控制程序pg2所包含的随机数生成函数ran(p)输入测量部21测量出的压力的值p来决定。具体地说,例如随机数生成函数ran(p)取出所输入的压力p的值的例如高位4位的数值,将由这4位的数值构成的整数除以100后所得的余数设为随机数。另外,例如也考虑预先将随机数运算用的ic安装于电路基板71,将该ic输出的随机数除以100后所得的余数决定为0~99为止的100个随机数之中的一个的结构。
[0039]
此外,在数据发送部22中具备载波侦听执行部22c(参照图3),若生成发送触发tg2,则在将发送数据d2发送前,载波侦听执行部22c执行载波侦听,一旦判定为数据发送部22的发送信道空闲,则将发送数据d2发送,在发送信道非空闲的情况下不将发送数据d2发送而是待机到空闲为止。而且,在从发送触发tg2的生成到经过发送数据d2的发送时间量(0.37[秒])为止都未能判定为发送信道空闲的情况下,不将发送数据d2发送。
[0040]
以下,说明子机终端20的cpu23a执行的第一及第二控制程序pg1、pg2(参照图5、6)。cpu23a每当接受作为从振荡电路75输出的周期信号的一个的例如0.6[秒]周期的中断信号,就执行第一及第二控制程序pg1、pg2。第一控制程序pg1的“t1”是用来对时间进行计数的计数器,第一及第二控制程序pg1、pg2的“flg1、flg2、flg3”是标示,这些在初始状态下为“0”。另外,“n1”是用来决定上述固定期间t4的长度的设定值,在本实施方式中,为了将固定期间t4设为10分钟,n1被设定为1000(=10分钟
×
60秒/0.6秒)。此外,“r”为保存随机数
的变量,初始值为“0”。以下,为了方便说明而称为随机数r。此外,第一及第二控制程序pg1、pg2所包含的tof(flg,x)为函数,通常输出“0”,flg从“0”变为“1”后用内部计数器对来自振荡电路75的0.6[秒]周期的中断信号进行计数,在该计数结果与x一致时输出“1”。此外,第一控制程序pg1所包含的mod(t,n)是输出将t除以n后所得的余数的函数。
[0041]
如图5所示那样,cpu23a若执行第一控制程序pg1,则判别flg3是否为“1”(s11),如果不是“1”,那么立即从第一控制程序pg1离开(在s11中,否)。换句话说,cpu23a实质上仅在第一控制程序pg1中flg3被设置为“1”时(相当于上述的回复判别部27判别有无ack信号的回复时),执行第一控制程序pg1。而且,如果flg3为“1”(在s11中,是),那么cpu23a通过步骤s12的函数tof(flg3,r)判定将flg3从“0”设置为“1”起的中断信号的计数值数是否与随机数r一致。而且,在函数tof(flg3,r)中判定的内部计数器对r进行计数后,将计数器t1增量1个(s13),判别flg1是否为“1”(s14)。如果不是“1”(在s14中,否),那么判定计数值数是否与n1一致(s13),在此如果为是,那么将flg1从“0”切换为“1”(s16),执行测量处理(s17)。在此,执行步骤s12时的cpu23a将上述定时更新部24删除,在步骤s12中判定为是的情形相当于测量开始触发tg3的生成。此时,在随机数r乘以中断信号的周期即0.6[秒]所得的值相当于前述的调整期间rt。此外,执行步骤s15时的cpu23a将上述第一触发生成部25a删除,在步骤s15中判定为是的情形相当于第一触发tg1的生成。此外,在步骤16中将flg1从“0”切换为“1”的情形相当于前述的固定期间t4的经过。
[0042]
cpu23a若执行测量处理(s17)则变成状态数据生成部26,从测量电路74接受压力传感器70的测量结果并进行数字信号化,由此生成压力数据。
[0043]
cpu23a在执行测量处理(s17)之后,判定“计数器t1”除以n1后所得的余数是否为“1”(s18),在此如果是1,那么执行发送处理(s19)。在此,执行步骤s18时的cpu23a相当于上述的第二触发生成部25b,在从第一触发tg1的生成起给定延迟时间δt1(0.6[秒])后,生成发送触发tg2。
[0044]
此外,执行发送处理(s19)时的cpu23a相当于数据发送部22。在该发送处理(s19)中,如作为数据发送部22已经说明过的那样,生成发送数据d2,进行载波侦听并将发送数据d2发送。此外,进行了载波侦听的结果,也有时因干扰而不将发送数据d2发送。
[0045]
发送处理(s19)已被执行时,无论发送数据d2是否已被发送,都将flg2从“0”设置为“1”,将flg1从“1”复位为“0”(s20、21)。此外,flg3从“1”被复位为“0”(s22),最后将计数器t1复位为“0”,第一控制程序pg1结束(s23)。
[0046]
如图6所示那样,cpu23a若执行第二控制程序pg2,则判别flg2是否为“1”(s24),如果不是“1”,那么立即从第二控制程序pg2脱离(在s24中,否)。换句话说,cpu23a实质上仅在第一控制程序pg1中flg2被设置为“1”时(仅在发送处理(s20)被执行时),执行第二控制程序pg2。而且,cpu23a判别子机终端20的无线电路76是否接收到ack信号(s25),在接收到ack信号的情况下(在s25中,是),将flg2复位为“0”,并且将flg3从“0”设置为“1”并从第二控制程序pg2脱离(s28、29)。在此,在步骤29中将flg3从“0”切换为“1”的情形,相当于前述的回复判别部27判别了ack信号的回复的有无的情形。
[0047]
在无法接收ack信号的情况下(在s25中,否),通过步骤s26的函数tof(flg2,5)来判定flg2从“0”被设置为“1”起的中断信号的计数值数是否与5一致。而且,等待ack信号的接收,直到通过函数tof(flg2,5)判定的内部计数器对5进行计数为止,换句话说直到flg2
变为“1”起经过了待机期间δt2为3[秒]为止(在s26中,否),在即便flg2变成“1”后经过3[秒]也未能接收ack信号的情况下(在s25中,否;在s26中,是),将压力的测量结果输入前述的随机数生成函数ran(p),将所得到的值保存于随机数r中(s27),将flg2复位为“0”,并且将flg3从“0”设置为“1”,从第二控制程序pg2脱离(s28、29)。
[0048]
以上是与本实施方式的监视系统100的结构相关的说明。根据使用了多个本实施方式的子机终端20的监视系统100,将包括作为多个监视对象物的牛10的状态数据d1(胃袋10s内的压力数据)在内的发送数据d2隔开固定的间隔地向母机终端30发送,并由云服务器50获取,因此能够通过云服务器50集中监视多头牛10的状态的变化。
[0049]
在此,全部的子机终端20隔开固定的间隔并按每个t4向母机终端30发送发送数据d2,因此这些发送定时叠加而产生干扰,母机终端30无法接收一部分或者全部的子机终端20的发送数据d2,可能产生无法朝向子机终端20回复ack信号的事态。
[0050]
相对于此,根据本实施方式的监视系统100,没有ack信号的回复的子机终端20,将由接下来测量部21进行的测量的定时向后偏移随机决定的调整期间rt量,来将发送数据d2的发送定时偏移而进行发送。另一方面,有ack信号的回复的子机终端20将调整期间rt设定为“0”且未将接下来的测量部21进行的测量的定时偏移。由此,即便针对多个子机终端20并未预先设定成发送定时偏离,也能将所有子机终端20逐渐地调度成在反复发送的期间内彼此发送定时未重叠。即,如果使用多个本实施方式的子机终端20,那么较之以往不需要时间和精力且能够以较少的消耗电力避免干扰。
[0051]
此外,调整期间rt的给定最大振幅t2为固定期间t4的1/10以下,因此本实施方式的子机终端20不需要变更多个子机终端20按每个固定期间t4来发送状态数据d1这样的一般性的日程,就能够不产生干扰地将子机终端20彼此的发送定时偏移。此外,在给定最大振幅t2的范围内,以给定分配长度t3的单位随机分散地决定调整期间rt,该给定分配长度t3为给定最大振幅t2的1/100,因此能够防止干扰,直到为最大100台子机终端20为止。
[0052]
此外,各子机终端20因没有ack信号的回复而不会进行再发送,因此即便如此也能抑制干扰和电力消耗。进而,在各子机终端20中,进行载波侦听后进行发送,因此即便如此也能够防止干扰。
[0053]
[第二实施方式]
[0054]
在本实施方式中,和第一实施方式不同之处在于成为以下结构:子机终端20v不管ack信号的回复的有无,都设定为测量部21进行的测量的定时按每个固定期间t4到来,在此基础上,在没有ack信号的回复的情况下,将发送数据d2的发送定时偏移随机决定的调整期间rt的量。以下,关于本实施方式的子机终端20v,仅针对与第一实施方式的子机终端20不同的结构进行说明。
[0055]
具体地说,如图7所示那样,子机终端20v的触发生成部25v具有定时更新部24v、第一触发生成部25av和第二触发生成部25bv。第一触发生成部25av按每个固定期间t4依次生成第一触发tg1v并赋予测量部21。而且,与所述第一实施方式同样地,测量部21测量牛10的胃袋10s内的压力,状态数据生成部26根据该测量结果而生成状态数据d1并赋予数据发送部22。
[0056]
自第一触发tg1v偏移将给定延迟时间δt1与调整期期间rt相加而得的时间后生成发送触发tg2。具体地说,每当生成第一触发tg1v,第二触发生成部25bv依次生成在从第
一触发tg1v起给定延迟时间δt1后偏移的第二触发tg4。另外,在本实施方式中,给定延迟时间δt1被设定为0.5秒。
[0057]
调整期间rt用来在母机终端30的接收时产生了干扰的情况下将发送定时偏移,初始设定的调整期间rt例如为“0”。每当生成第二触发tg4,定时更新部24v生成自第二触发tg4起仅在调整期间rt后偏移的发送触发tg2,在初始状态下,第二触发tg4和发送触发tg2相同。而且,接受该发送触发tg2,数据发送部2通过无线发送发送数据d2。此外,若通过数据发送部22来发送发送数据d2,则在经过待机时间δt2前,回复判别部27判别是否通过无线电路76从母机终端30接收了ack信号的回复。另外,在本实施方式中,待机时间δt2例如被设定为10[秒]。
[0058]
而且,在回复判别部27判断为没有ack信号的回复的情况下,调整值运算部28将调整期间rt决定为随机的长度。而且,此后由定时更新部24v生成的发送触发tg2自第二触发tg4起推迟了随机长度的调整期间rt,数据发送部22接受该发送触发tg2而发送发送数据d2。
[0059]
自此,在经过固定期间t4(例如,10分钟)后,在发送了下一个发送数据d2时也同样地回复判别部27判断为没有ack信号的回复的情况下,调整值运算部28重新将调整期间rt决定为随机的长度。而且,此后由定时更新部24v生成的发送触发tg2自第二触发tg4起仅推迟了新的调整期间rt,数据发送部22接受该发送触发tg2并发送发送数据d2。
[0060]
此外,在回复判别部27判断为有ack信号的回复的情况下,调整值运算部28不会重新决定调整期间rt,而是将调整期间rt维持相同的长度。由此,自此以后,定时更新部24v生成的发送触发tg2从第二触发tg4起推迟了与现状相同的长度的调整期间rt,数据发送部22接受该发送触发tg2并发送发送数据d2。
[0061]
在图8中概念性地表示上述的各触发的生成定时等。在此,tg1v表示第一触发tg1v的生成定时,tg4表示第二触发tg4的生成定时,tg2表示发送触发tg2的生成定时。
[0062]
如图8所示那样,第一触发生成部25av按每个固定期间t4来生成第一触发tg1v,由此测量部21进行的测量的定时与ack信号有无回复无关地按每个固定期间t4而被固定。而且,调整值运算部28根据状态数据生成部26生成了发送数据d2的定时(第二触发tg4的生成定时),在给定最大振幅t2的范围内以给定分配长度t3的单位随机分散地决定调整期间rt。在本实施方式中,给定最大振幅t2被设定成相当于固定期间t4(例如,10[分钟])的例如1/10的1[分钟],给定分配长度t3被设定为0.1[秒]。换句话说,调整值运算部28从600(=1分/0.1秒)个中随机数决定一个随机数,将其乘以给定分配长度t3即0.1所得的值决定为调整期间rt。
[0063]
另外,作为从600个中决定任意的随机数的一具体示例,和第一实施方式同样地,通过将测量部21测量出的压力的值p输入后述的第二v控制程序pg2v所包含的随机数生成函数ran(p)来决定。具体地说,例如随机数生成函数ran(p)取出所输入的压力p的值的例如高位4位的数值,将该4位的数值构成的整数除以600后所得的余数设为随机数。此外,也考虑以下结构:预先将随机数运算用的ic安装于电路基板71,将该ic输出的随机数除以600后所得的余数决定为0~599为止的600个随机数之中的一个。
[0064]
此外,数据发送部22进行了无线发送时的发送数据d2的数据长度(换句话说,数据帧的数据长度),被设定为给定分配长度t3的例如1/10即0.01[秒]。此外,数据发送部22中
具备载波侦听执行部22c,若生成发送触发tg2,则在发送发送数据d2之前,载波侦听执行部22c执行载波侦听,一旦判定为数据发送部22的发送信道空闲,则发送发送数据d2,在发送信道为非空闲的情况下,则不会发送发送数据d2而是待机到空闲为止。而且,在自发送触发tg2的生成到经过给定分配长度t3的时间为止能够将发送数据d2发送完的情况下,发送发送数据d2,在无法发送完的情况下,则不发送发送数据d2。而且,在数据发送部22不发送发送数据d2的情况下,和发送发送数据d2但没有与此对应的ack信号的回复的情况同样地进行处理。
[0065]
此外,在本实施方式中,子机终端20v的cpu23a执行相当于所述第一实施方式的第一及第二控制程序pg1、pg2的第一v及第二v控制程序pg1v、pg2v(参照图9、10)。以下,对第一v及第二v控制程序pg1v、pg2v进行说明。cpu23a每当接受作为从振荡电路75输出的周期信号的一个的例如0.1[秒]周期的中断信号,执行第一v及第二v控制程序pg1v、pg2v。由此,在本实施方式中,为了使固定期间t4为10分钟,n1被设定为6000(=10分钟
×
60秒/0.1秒)。另外,第一v控制程序pg1v的“flg4”为标示,在初始状态下为“0”。
[0066]
如图9所示那样,cpu23a若执行第一v控制程序pg1v,则判定“计数器t1 1”除以6000后所得的余数是否为“1”(s11v),如果余数为“1”(在s11v中,是),那么执行测量处理(s12v)。换句话说,执行该步骤s11v时的cpu23a将上述的第一触发生成部25av删除,在步骤s11v中判定为是的情形,相当于第一触发tg1v的生成。
[0067]
cpu23a若执行测量处理(s12v)、则变成状态数据生成部26,从测量电路74接受压力传感器70的测量结果并进行数字信号化,由此生成压力数据。
[0068]
cpu23a在执行测量处理(s12v)后,判别flg4是否为“1”(s13v),如果不是“1”(在s13v中,否),则判定“计数器t1 1”除以6000后所得的余数是否为“5”(s14v),在此如果是,则将flg4从“0”切换为“1”。在此,将flg4从“0”切换为“1”,相当于前述的第二触发tg4的生成,执行上述的步骤s14v时的cpu23a则相当于上述的第二触发生成部25bv。此外,通过步骤s13v~s15v,在自第一触发tg1v的生成起给定延迟时间δt1(0.5[秒])后生成第二触发tg4。
[0069]
若将flg4从“0”切换为“1”,则通过步骤s16v的函数tof(flg4,r)判定此后的中断信号的计数值数是否与随机数r一致。在此,由于随机数r的初始值为“0”,故在将flg4从“0”切换为“1”后随即中断信号的计数值数与随机数r一致,函数tof(flg4,r)的输出变为“1”(在s16v中,是),执行发送处理(s17v)。另外,在将随机数r设置为“0”以外的值时,经过了将flg4从“0”切换为“1”起的中断信号的计数值数与随机数r一致为止的时间后,执行发送处理(s17v)。换句话说,随机数r乘以中断信号的周期即0.1[秒]所得的值相当于前述的调整期间rt。
[0070]
在此,执行步骤s16v时的cpu23a相当于定时更新部24v,在步骤s16v中判定为是的情形,相当于发送触发tg2的生成。此外,执行发送处理(s17v)时的cpu23a相当于数据发送部22。在该发送处理(s17)中,如作为数据发送部22已经说明过的那样,生成发送数据d2,进行载波侦听并发送发送数据d2。此外,进行了载波侦听的结果,也有时会因干扰而不发送发送数据d2。
[0071]
在发送处理(s17v)已被执行时,无论发送数据d2是否已被发送,都将flg3从“0”设置为“1”,将flg4从“1”复位为“0”(s18v、19v)。此外,第一v控制程序pg1v最后将计数器t1增
量1个而结束(s20v)。
[0072]
如图10所示那样,cpu23a若执行第二v控制程序pg2v,则判别flg2是否为“1”(s24v),如果不是“1”,那么立即从第二v控制程序pg2v脱离(在s21中,否)。换句话说,cpu23a实质上仅在第一v控制程序pg1v中flg2被设置成“1”时(仅在执行了发送处理(s17v)时),执行第二v控制程序pg2v。而且,cpu23a判别子机终端20v的无线电路76是否接收到ack信号(s25v),在接收ack信号的情况下(在s5v中,是),将flg2复位为“0”,并从第二v控制程序pg2v脱离(s28v)。
[0073]
在无法接收ack信号的情况下(在s25v中,否),通过步骤s23的函数tof(flg2,100)来判定将flg2从“0”置为“1”起的中断信号的计数值数是否与100一致。而且,在函数tof(flg2,100)中判定的内部计数器对100进行计数之前,换句话说,在flg2变成“1”且经过10[秒]之前,等待ack信号的接收(在s26v中,否),在即便flg2变成“1”且经过10[秒]、也无法接收ack信号的情况下(在s25v中,否,在s26v中,是),将压力的测量结果输入前述的随机数生成函数ran(p),将所得到的值保存于随机数r,将flg2复位为“0”而从第二控制程序pg2v脱离(s28v)。
[0074]
根据本实施方式的监视系统100,不管有无ack信号的回复,都设定成测量部21进行的测量的定时按每个固定期间t4到来,在此基础上,没有ack信号的回复的子机终端20使发送数据d2的发送定时偏移随机决定的调整期间rt来进行发送。另一方面,有ack信号的回复的子机终端20以现状的发送定时直接进行发送。根据该结构,也能起到与第一实施方式的子机终端20同样的作用效果。
75.此外,调整期间rt的给定最大振幅t2为固定期间t4的1/10以下,因此本实施方式的子机终端20v无需变更多个子机终端20按每个固定期间t4来发送状态数据d1这样的一般的日程,就能不产生干扰地使子机终端20彼此的发送定时偏移。此外,在给定最大振幅t2的范围内,以给定分配长度t3的单位随机分散地决定调整期间rt,该给定分配长度t3成为给定最大振幅t2的1/600,因此能防止干扰,直到最大600台子机终端20为止。
[0076]
并且,在本实施方式的子机终端20v中,数据发送部22仅在自生成发送触发tg2起经过载波侦听执行部22c的判别到发送完状态数据d1为止的期间比基于定时更新部24的发送触发tg2的生成定时的给定分配t3短的情况下进行发送,因此也能防止通过载波侦听而使发送定时向后偏离引起的干扰。并且,进行了在载波侦听的结果,因干扰而未发送发送数据d2的子机终端20也和没有ack信号的回复的子机终端20同样地,从其之后的固定期间t4后将发送定时偏移随机决定的调整期间rt来进行发送,因此能顺畅地消除干扰。
[0077]
[其他实施方式]
[0078]
(1)在上述实施方式的子机终端20中,调整期间rt的给定最大振幅t2被设定成固定期间t4的1/10以下,但只要调整期间rt的给定最大振幅t2比固定期间t4短,也可以将给定最大振幅t2设定为任何值。另外,在按每个固定期间t4监视多个子机终端20的发送数据d2的情况下,优选调整期间rt的给定最大振幅t2为固定期间t4的1/2以下。
[0079]
(2)上述实施方式的子机终端20在发送发送数据d2之际,进行了载波侦听,但也可以设为不进行载波侦听就发送发送数据d2的结构。
[0080]
(3)在上述实施方式中,回复判别部27放弃判别为无ack信号的回复的发送数据d2,但也可以在下一个固定期间t4后与新的发送数据d2一并发送前一次的发送数据d2。
[0081]
(4)在上述第二实施方式中,在没有ack信号的回复的情况下,将发送触发tg2的生成定时相对于现状的生成定时与前后无关地进行偏移,但也可以仅向现状的发送触发tg2的生成定时之后或者之前的一方偏移。
[0082]
(5)上述实施方式的监视系统100被使用于家畜的监视,但也可以为了监视植物、监视车辆的各部位的状态,或为了监视化学工厂的状态而使用监视系统100。
[0083]
(6)另外,子机终端20、20v也可以取代压力传感器70或者在其基础上,将温度传感器、加速度传感器等别的传感器连接于测量电路74,以测量作为牛10的状态的体温、行为等。
[0084]
在连接了加速度传感器的情况下,子机终端20、20v的cpu23a也可以是在一次性获取压力传感器70、温度传感器等所测量的压力数据、温度数据为止的期间内,多次获取由加速度传感器测量出的加速度数据而进行累计的结构。
[0085]
另外,在本说明书及附图中,公开了权利要求所包含的技术性的具体示例,但权利要求所记载的技术并不限定于这些具体示例,也包括对具体示例进行了各种各样变形、变更而得到的技术,此外,还包括从具体示例单独取出一部分的情形。
[0086]-符号说明-[0087]
10牛(家畜、监视对象物)
[0088]
10s胃袋
[0089]
20、20v子机终端
[0090]
21测量部
[0091]
22数据发送部
[0092]
22c载波侦听执行部
[0093]
24、24v定时更新部
[0094]
25、25v触发生成部
[0095]
26状态数据生成部
[0096]
27回复判别部
[0097]
28调整值运算部
[0098]
30母机终端(监视装置)
[0099]
50云服务器(监视装置)
[0100]
70压力传感器
[0101]
73防水外壳
[0102]
d1状态数据
[0103]
d2发送数据
[0104]
p压力
[0105]
pg1第一控制程序
[0106]
pg1v第一v控制程序
[0107]
pg2第二控制程序
[0108]
pg2v第二v控制程序
[0109]
rt调整期间
[0110]
t3给定分配长度(偏移量)
[0111]
t4固定期间
[0112]
tg2发送触发
[0113]
tg3测量开始触发
[0114]
δt1给定延迟时间。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。