1.本发明属于海洋环境雷达监测技术领域,涉及一种岸基超高频雷达风向反演方法,具体地说,是基于修正的回波多普勒谱质心的岸基超高频雷达风向反演方法及系统。
背景技术:
2.近岸海域是海洋中与人类关系最为密切的部分。准确了解近岸海域的海风信息对于物理海洋学研究、船舶导航、海上搜救、海洋工程和渔业等领域都有着十分重要的意义。
3.典型的海风测量仪器包括安装于船上或浮标上的风速风向仪、星载散射仪、星载辐射计、星载合成孔径雷达、机载测风仪、岸基或舰载x波段雷达和高频地波雷达等。风速风向仪只能获取特定轨道或单个位置的风信息,近岸海域海风复杂多变,要保证足够的空间采样率需要安装大量的风速风向仪,成本高昂且维护困难。星载和机载仪器空间覆盖范围大,但驻留时间有限或无法驻留,难以对固定海域长时间连续观测。x波段雷达具有高时空分辨率,但易受雨、雾等天气因素干扰。高频地波雷达能够以较低成本实现大范围全天候实时测量,但是在距离海岸线较近的区域存在观测盲区,并且空间分辨率(一般为几公里)对于近岸海域来说太粗糙。
4.岸基超高频雷达工作原理与高频地波雷达类似,可以全天候实时作业,但是探测范围更集中于近岸海域。超高频雷达对应的布拉格谐振海浪位于海洋重力波的较高频段,容易被较低的风速激励,因此超高频雷达对于海风的微小变化更为敏感。超高频雷达的空间分辨率为10米量级,比高频地波雷达更为精细。此外,超高频雷达的天线阵列比高频地波雷达小得多,便于在海岸上架设。综上所述,超高频雷达具有高灵敏度、高分辨率、、低成本的近岸风场全天候实时测量潜力。
5.现有的岸基超高频雷达风向反演方法
1.与高频地波雷达
[2][3][4]
相同,即根据回波多普勒谱上的正频率一阶布拉格峰与负频率一阶布拉格峰的功率比值(bragg peak power ratio,简称bppr)反演风向,其原理介绍陈述如下。
[0006]
针对岸基超高频雷达的海面电磁散射,一般使用双尺度模型描述海面粗糙度,即将海浪表示成大尺度波浪与小尺度波浪之和:
[0007][0008]
其中,表示海浪高度,表示水平面坐标,t表示时间。表示大尺度波浪高度,大尺度波浪是指波长远大于电磁波波长的海浪,其电磁散射遵循物理光学定律。表示小尺度波浪高度,小尺度波浪是指波长与电磁波波长接近或小于电磁波波长的海浪,其电磁散射遵循微扰理论。双尺度模型所描述的海面散射机制为:小尺度波浪产生较强的布拉格谐振散射,大尺度波浪对布拉格散射回波进行调制,包括倾斜调制、流体力学调制、阴影调制和轨道调制等作用。
[0009]
基于双尺度模型,可以求出岸基超高频雷达的海面后向散射回波多普勒谱的表达式:
[0010]
g(ω)=g0(ω) g1(ω)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0011][0012][0013][0014]
其中,g(ω)表示回波多普勒谱,ω表示角频率。a表示电磁波照射区域面积,k是雷达发射电磁波的波数矢量的幅度,σr是大尺度波浪轨道速度的径向分量υr的均方根。和分别表示朝向和背离雷达运动的布拉格散射海浪的散射截面积,其表达式如(5)式所示。《
·
》表示取平均值。ωb表示布拉格谐振海浪的回波角频率。表示的起伏量的均方根。表示σr和的相关系数。(5)式中,κ表示海浪的波数矢量的幅度,表示大尺度波浪对散射回波的幅度调制(包括倾斜调制和流体力学调制),s(
·
)表示有向浪高谱,表示布拉格谐振海浪的波数矢量。对于岸基超高频雷达,海面后向散射满足掠入射条件,可以近似为
[0015]
根据(2)~(4)式,可以求出正频率一阶布拉格峰和负频率一阶布拉格峰对应频率的表达式。正负频率一阶布拉格峰分别是多普勒谱正负频率半轴上功率最大的尖峰,此处多普勒谱导数为零,即
[0016][0017]
将(2)~(4)式代入(6)式,可求出
[0018][0019][0020]
其中,ω
p
表示正频率一阶布拉格峰的角频率,ωn表示负频率一阶布拉格峰的角频率。
[0021]
将(7)~(8)式代入(2)~(5)式,可求出正负频率一阶布拉格峰的功率比值bppr的表达式,即
[0022]
[0023]
其中,r表示bppr。由(9)式可看出,bppr取决于朝向雷达和背离雷达运动的布拉格谐振海浪的有向浪高谱比值。有向浪高谱s(
·
)通常表示为
[0024][0025]
其中,f(κ)表示无向浪高谱,θ表示海浪波数矢量与平均波向的夹角,c(θ)表示波浪方向扩展函数。将(10)式代入(9)式,可得到
[0026][0027]
其中,r表示bppr,s()表示有向浪高谱,c()表示波浪方向扩展函数,是雷达发射电磁波的波数矢量。θr表示雷达波束方向,也就是背离雷达运动的布拉格谐振海浪的方向,θw表示波数幅度为2k的海浪的平均波向。由(11)式可看出,如果c(θ)已知,并且假设风向与θw一致,则可以由bppr反演得到风向。
[0028]
目前已经有多种形式的波浪方向扩展函数被提出,其中应用最为广泛的是余弦形式的扩展函数和双曲正割形式的扩展函数,如下所示:
[0029][0030]csech
(θ)=0.5βsech2(βθ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0031]
其中,γ表示gamma函数,s和β分别是两种形式的方向扩展函数的参数,其大小与风速、波浪频率等因素有关。从(12)式和(13)式可看出,方向扩展函数关于原点对称,即c(θ)=c(-θ),因此将(12)式或(13)式代入(11)式,可以得到
[0032]
θw=θr±
θ(r)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0033]
其中,θ(r)表示雷达波束方向和风向之间的夹角,其值根据r和波浪方向扩展函数计算得到。从(14)式可看出,计算得到的风向存在模糊性,即存在两个解,,对称分布于雷达波束方向的左侧和右侧。因此,还需要有相应的算法消除方向模糊性,得到唯一的风向值,常用的方法有最大似然估计法、最小二乘法等。
[0034]
以上描述了岸基超高频雷达由bppr反演风向的原理。实际应用中,我们发现,此方法的缺陷是,当风速较高时,两个一阶布拉格峰中功率较小的那一个常常被高阶回波淹没,使得无法计算bppr值,也就无法反演风向。
[0035]
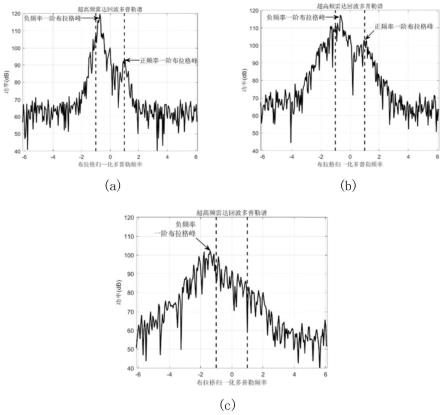
图1显示了同一地点同一岸基超高频雷达在不同风速下的实测回波多普勒谱。图1(a)、(b)、(c)对应的风速分别为4.76m/s、9.73m/s和15.78m/s。图中的虚线表示当海流径向流速为零时一阶布拉格峰的位置。实测时由于径向流速不为零,一阶布拉格峰相对于虚线有所偏移。从图中可以看到,一阶布拉格峰周围存在很多较低的尖峰,本发明称之为高阶峰。高阶峰主要由大尺度波浪的调制作用形成。随着风速的增加,一阶峰与高阶峰之间的功率差逐渐减小。在较高风速下,如图1(c),较低的一阶布拉格峰被高阶峰淹没,此时由于无法找到两个一阶布拉格峰,也就无法计算bppr,因此不能根据bppr反演风向。
[0036]
参考文献:
[0037]
[1]文必洋,李艳,侯义东等,超高频雷达系统海面风向反演试验研究,华中科技大学学报(自然科学版),第45卷,第4期,2017年
[0038]
[2]专利“基于船载高频地波超视距雷达的海面风向提取方法”(申请号cn201310674131.3)
[0039]
[3]专利“一种利用高频地波雷达探测海面风向的方法”(申请号cn201910162632.0)
[0040]
[4]专利“基于风向区间限定的船载地波雷达无模糊风向估计方法”(申请号cn202210414233.0)
技术实现要素:
[0041]
本发明的目的就在于解决岸基超高频雷达基于bppr的风向反演方法在高风速下不可用的问题。本发明提出一种新的岸基超高频雷达风向反演方法,即根据修正的多普勒谱质心(modified doppler spectrum centroid,mdsc)反演风向。
[0042]
本发明提供的一种岸基超高频雷达风向反演方法,利用修正的超高频雷达回波多普勒谱质心进行反演,反演实现过程包括计算超高频雷达回波多普勒谱,计算多普勒谱质心,在多普勒谱上寻找正频率一阶布拉格峰和负频率一阶布拉格峰,计算修正的多普勒谱质心;根据选择的波浪方向扩展函数建立修正的多普勒谱质心与风向的函数关系,根据修正的多普勒谱质心值估计风向,消除风向模糊。
[0043]
而且,所述多普勒谱质心的定义如下,
[0044][0045]
其中,g()表示回波多普勒谱,ω表示角频率。
[0046]
而且,所述计算超高频雷达回波多普勒谱的实现方式包括,对雷达回波进行距离元分离,接收通道校准,形成回波信号的数字波束,计算不同距离元、不同方位的回波合成信号的多普勒谱。
[0047]
而且,在多普勒谱上寻找正频率一阶布拉格峰和负频率一阶布拉格峰的实现方式如下,
[0048]
(1)设定测量海域最大流速值,根据最大流速值确定多普勒谱上正频率一阶布拉格峰和负频率一阶布拉格峰的分布范围
[0049]
(2)在正频率一阶布拉格峰分布范围内搜寻功率和突出度均超过指定阈值的谱峰,并按照功率由大到小的顺序排列,其频率值记为ω
p1
,ω
p2
,ω
p3
,
……
;在负频率一阶布拉格峰分布范围内同样处理,得到的谱峰频率值记为ω
n1
,ω
n2
,ω
n3
,
……
;
[0050]
(3)如果在正频率和负频率一阶布拉格峰分布范围内搜寻到的谱峰数量均不为零,则分别从两个分布范围内选出一个谱峰组成谱峰对,计算频率差,在计算所有谱峰对的频率差后,记为ω
p1-ω
n1
,ω
p1-ω
n2
,ω
p2-ω
n1
,ω
p2-ω
n2
,
……
;
[0051]
如果频率差超过设置的相应门限,则舍弃此谱峰对;
[0052]
如果最后剩下的谱峰对数量不为零,则从中选择平均功率最大的谱峰对,对应的谱峰作为正频率一阶布拉格峰和负频率一阶布拉格峰;
[0053]
如果剩下的谱峰对数量为零,则认为无法找到此多普勒谱的正频率一阶布拉格峰和负频率一阶布拉格峰;
[0054]
如果仅在正频率一阶布拉格峰分布范围内搜寻到的谱峰数量不为零,则将功率最大的谱峰作为正频率一阶布拉格峰,同时认为无法找到此多普勒谱的负频率一阶布拉格峰;
[0055]
如果仅在负频率一阶布拉格峰分布范围内搜寻到的谱峰数量不为零,则将功率最大的谱峰作为负频率一阶布拉格峰,同时认为无法找到此多普勒谱的正频率一阶布拉格峰。
[0056]
(4)去除异常的一阶布拉格峰。
[0057]
而且,所述去除异常的一阶布拉格峰,实现如下,
[0058]
对于某一个距离元的正频率一阶布拉格峰,计算与之相邻的多个距离元的正频率一阶布拉格峰的频率均值,如果此距离元的正频率一阶布拉格峰的频率与均值相差过大,则认为此距离元的正频率一阶布拉格峰为异常值,从后续计算中去除;
[0059]
对于某一个距离元的负频率一阶布拉格峰,计算与之相邻的多个距离元的负频率一阶布拉格峰的频率均值,如果此距离元的负频率一阶布拉格峰的频率与均值相差过大,则认为此距离元的负频率一阶布拉格峰为异常值,从后续计算中去除。
[0060]
而且,计算修正的多普勒谱质心mdsc,实现方式如下,
[0061]
如果正负频率一阶布拉格峰均被找到,则根据下式计算mdsc,
[0062][0063]
如果负频率一阶布拉格峰被淹没,只找到正频率一阶布拉格峰,则根据下式计算mdsc,md
ω
=d
ω-(ω
p-ωb)
[0064]
如果正频率一阶布拉格峰被淹没,只找到负频率一阶布拉格峰,则根据下式计算mdsc,
[0065]
md
ω
=d
ω-(ωn ωb)
[0066]
其中,ω
p
表示正频率一阶布拉格峰的角频率,ωn表示负频率一阶布拉格峰的角频率,g()表示回波多普勒谱,ωb表示布拉格谐振海浪的回波角频率。
[0067]
另一方面,本发明提供一种岸基超高频雷达风向反演系统,用于实现如上所述的一种岸基超高频雷达风向反演方法。
[0068]
而且,包括处理器和存储器,存储器用于存储程序指令,处理器用于调用存储器中的存储指令执行如上任一项所述的一种岸基超高频雷达风向反演方法。
[0069]
或者,包括可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序执行时,实现如上所述的一种岸基超高频雷达风向反演方法。
[0070]
和相关文献相比,本发明的区别是:根据mdsc值反演风向,优点在于:解决了现有的基于bppr的风向反演技术在高风速下无法反演风向的问题,扩大了岸基超高频雷达风向反演技术的适用风速范围,提升了雷达风向反演能力。
附图说明
[0071]
图1是本发明实施例的岸基超高频雷达回波多普勒谱图示例。图1包含3个不同风速下的回波多普勒谱图,其中,(a)图是风速为4.76m/s的雷达回波多普勒谱图,(b)图是风速为9.73m/s的雷达回波多普勒谱图,(c)图是风速为15.78m/s的雷达回波多普勒谱图。
[0072]
图2是本发明实施例的步骤示意图。
[0073]
图3是本发明实施例的结果示例图。实验于2015年10月在福建黄岐半岛进行。其中,(a)图和(c)图是使用余弦形式的方向扩展函数的结果,(b)图和(d)图是使用双曲正割
形式的方向扩展函数的结果。(a)图和(b)图显示了岸基超高频雷达和安装于浮标上的风向仪在同一地点的测量值随时间的变化,横坐标为日期,纵坐标为风向,实线曲线为雷达测量结果,虚线曲线为浮标测量结果。(c)图和(d)图是散点图,横坐标为浮标测得风向,纵坐标为雷达测得风向,颜色深浅表示风速高低(单位:米/秒)。
[0074]
图4是本发明实施例的优势的说明图。曲线显示了实验期间风速随时间的变化,点标注了无法计算bppr的时刻,整个实验期间,mdsc的值都是可以计算得到的。
具体实施方式
[0075]
以下结合附图和实施例说明本发明的技术方案。
[0076]
本发明提出的多普勒谱质心的定义如下:
[0077][0078]
将(2)~(5)式代入(15)式,得到
[0079][0080]
将(7)式和(8)式代入(16)式,得到
[0081][0082]
将(17)式的第二个分式从d
ω
中减去,即得到mdsc的表达式。
[0083][0084]
从(18)式可以看出,mdsc由两部分组成,第一部分是多普勒谱质心,利用(15)式很容易从多普勒谱计算得到;第二部分是正负频率一阶布拉格峰的功率、频率的函数,用b表示。如果多普勒谱上两个一阶布拉格峰都可以分辨,则函数值b很容易计算。如果有一个一阶布拉格峰被淹没,则b可以用另一个一阶布拉格峰计算。例如,如果负频率一阶布拉格峰被淹没,则意味着正频率一阶布拉格峰的功率远大于负频率一阶布拉格峰,即此时b近似等于ω
p-ωb,因此b可以由正频率一阶布拉格峰的频率计算得到。由此说明,无论是低风速下可分辨两个一阶布拉格峰的情况,还是高风速下仅可分辨一个一阶布拉格峰的情况,都能够计算mdsc。
[0085]
将(17)式代入(18)式,得到
[0086][0087]
其中,ωb表示布拉格谐振海浪的回波角频率,s(
·
)表示有向浪高谱,是雷达发射电磁波的波数矢量。
[0088]
从(19)式可以看出,由于雷达发射电磁波频率已知,ωb为定值,因此mdsc仅取决于朝向雷达和背离雷达运动的布拉格谐振海浪的有向浪高谱比值。此性质与bppr相同。因此,类似于bppr,如果c(θ)已知,并且假设风向与θw一致,则可以由mdsc反演得到风向。
[0089]
参见图2,实施例提供的一种基于mdsc的岸基超高频雷达风向反演方法包含如下步骤:
[0090]
步骤1,计算得到岸基超高频雷达的回波多普勒谱g(ω)。
[0091]
步骤2,将回波多普勒谱g(ω)代入(15)式,计算得到多普勒谱质心d
ω
。
[0092]
步骤3,在多普勒谱上寻找正频率一阶布拉格峰和负频率一阶布拉格峰,确定其频率ω
p
、ωn以及功率g(ω
p
)、g(ωn)。
[0093]
步骤4,计算修正的多普勒谱质心,包括如果正负频率一阶布拉格峰均被找到,则根据(20)式计算mdsc。
[0094][0095]
如果负频率一阶布拉格峰被淹没,只找到正频率一阶布拉格峰,则根据(21)式计算mdsc。
[0096]
md
ω
=d
ω-(ω
p-ωb)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0097]
如果正频率一阶布拉格峰被淹没,只找到负频率一阶布拉格峰,则根据(22)式计算mdsc。
[0098]
md
ω
=d
ω-(ωn ωb)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(22)
[0099]
步骤5,根据所选择的波浪方向扩展函数建立修正的多普勒谱质心与风向的函数关系,包括选择波浪方向扩展函数,将其表达式代入(11)式,再把(11)式代入(19)式,建立mdsc与风向的函数关系。
[0100]
步骤6,根据修正的多普勒谱质心值估计风向,包括根据步骤4得到的mdsc值和步骤5得到的函数式,求解风向值。此步骤一般会得到两个解。
[0101]
步骤7,消除风向模糊,包括采用去模糊算法消除风向模糊,确定唯一的风向值。
[0102]
为便于实施参考起见,下面以武汉大学研制的岸基超高频雷达为例来说明实施例实施步骤。雷达发射波形为调频中断连续波(frequency modulated interrupted continuous wave,fmicw),发射天线和接收天线均使用主瓣宽度为60
°
的八木天线,接收天线阵是由8根八木天线组成的线性阵。
[0103]
1、流程实施步骤
[0104]
实施例提供的一种岸基超高频雷达风向反演方法,包括以下步骤:
[0105]
步骤1,计算得到岸基超高频雷达的回波多普勒谱g(ω)。具体做法是:
[0106]
(1)对雷达回波进行距离元分离,即在每个扫频周期内,将雷达回波原始信号与发射信号混频,再对混频结果进行快速傅里叶变换(fast fourier transform,fft)。由于发射波形为fmicw,因此回波与发射信号混频后的信号频率与散射元的距离成正比。再经过fft后,频谱上的每个频率元即对应不同距离的回波信号,因而频率元也称为距离元,经过上述处理后不同距离元的回波得到了分离。
[0107]
(2)接收通道校准,即消除雷达多个接收通道回波的幅度和相位误差。雷达每根接
收天线对应一个接收通道,不同的接收通道对回波信号的幅度调制和相位调制作用存在差异,这种差异称为幅度误差和相位误差。校准方法包括无源校准和有源校准。无源校准利用来自岛屿、灯塔、非合作船舶等的回波进行校准。有源校准利用专门设置的一个或多个辅助源进行校准,如应答器、通用射频信号源等。
[0108]
(3)回波信号的数字波束形成,即利用数字波束形成技术在雷达波束覆盖范围内的多个方位得到所有接收通道的回波合成信号。合成信号对应的波束宽度远小于原始波束宽度。
[0109]
(4)多普勒谱估计,即计算不同距离元、不同方位的回波合成信号的多普勒谱。
[0110]
步骤2,将回波多普勒谱g(ω)代入(15)式,计算得到多普勒谱质心d
ω
。
[0111]
步骤3,在多普勒谱上寻找正频率一阶布拉格峰和负频率一阶布拉格峰,确定其频率ω
p
、ωn以及功率g(ω
p
)、g(ωn)。具体做法是:
[0112]
(1)设定测量海域最大流速值,根据最大流速值确定多普勒谱上正频率一阶布拉格峰和负频率一阶布拉格峰的分布范围。
[0113]
(2)在正频率一阶布拉格峰分布范围内搜寻功率和突出度均超过指定阈值的谱峰(即局部最大值),并按照功率由大到小的顺序排列,其频率值记为ω
p1
,ω
p2
,ω
p3
,
……
。在负频率一阶布拉格峰分布范围内也采取同样的做法,得到的谱峰频率值记为ω
n1
,ω
n2
,ω
n3
,
……
。
[0114]
(3)如果在正频率和负频率一阶布拉格峰分布范围内搜寻到的谱峰数量均不为零,则分别从两个分布范围内选出一个谱峰组成谱峰对,计算其频率差,按照此方法计算所有谱峰对的频率差,记为ω
p1-ω
n1
,ω
p1-ω
n2
,ω
p2-ω
n1
,ω
p2-ω
n2
,
……
。如果频率差超过所设置的门限(例如大于2.5ωb),则舍弃此谱峰对。如果最后剩下的谱峰对数量不为零,则从中选择平均功率最大的谱峰对,其对应的谱峰即作为正频率一阶布拉格峰和负频率一阶布拉格峰。如果剩下的谱峰对数量为零,则认为无法找到此多普勒谱的正频率一阶布拉格峰和负频率一阶布拉格峰。
[0115]
如果仅在正频率一阶布拉格峰分布范围内搜寻到的谱峰数量不为零,则将功率最大的谱峰作为正频率一阶布拉格峰,同时认为无法找到此多普勒谱的负频率一阶布拉格峰。
[0116]
如果仅在负频率一阶布拉格峰分布范围内搜寻到的谱峰数量不为零,则将功率最大的谱峰作为负频率一阶布拉格峰,同时认为无法找到此多普勒谱的正频率一阶布拉格峰。
[0117]
(4)去除异常的一阶布拉格峰。具体做法是:
[0118]
对于某一个距离元的正频率一阶布拉格峰,计算与之相邻的多个距离元的正频率一阶布拉格峰的频率均值,如果此距离元的正频率一阶布拉格峰的频率与均值相差过大,则认为此距离元的正频率一阶布拉格峰为异常值,将其从后续计算中去除。
[0119]
对于某一个距离元的负频率一阶布拉格峰,计算与之相邻的多个距离元的负频率一阶布拉格峰的频率均值,如果此距离元的负频率一阶布拉格峰的频率与均值相差过大,则认为此距离元的负频率一阶布拉格峰为异常值,将其从后续计算中去除。
[0120]
步骤4,计算mdsc的值。
[0121]
如果找到两个一阶布拉格峰,则根据(20)式计算mdsc。
[0122]
如果只找到正频率一阶布拉格峰,则根据(21)式计算mdsc。
[0123]
如果只找到负频率一阶布拉格峰,则根据(22)式计算mdsc。
[0124]
步骤5,选择波浪方向扩展函数,将其表达式代入(11)式,再把(11)式代入(19)式,建立mdsc与风向的函数关系,例如:
[0125][0126][0127]
其中,m1(θw)、m2(θw)均表示mdsc。(23)式是基于余弦形式的波浪方向扩展函数,(24)式是基于双曲正割形式的扩展函数。具体实施时,还可以根据需要选用其他波浪方向扩展函数,例如apel提出的高斯函数形式的方向扩展函数,elfouhaily提出的统一传播模型等。
[0128]
步骤6,将步骤4得到的mdsc值代入步骤5得到的函数式,求解风向值。此步骤一般会得到两个解。
[0129]
步骤7,采用去模糊算法消除风向模糊,确定唯一的风向值。
[0130]
消除风向模糊性的方法有多种。此处以最小二乘法为例,来说明具体做法。
[0131]
在雷达波束范围内选取同一距离元,不同方位的多个多普勒谱,按照步骤2到步骤4的做法得到每个方位的mdsc值。假设步骤5所选取的波浪方向扩展函数为双曲正割形式的扩展函数,则可以用下式求出唯一风向值。
[0132][0133]
其中,p表示所选取方位的个数,βn表示方向扩展参数的第n个备选值,θ
rj
表示所选取的第j个方位的回波合成信号对应的波束方向,θ
wk
表示第k个备选的风向值,取值范围是θ
wk
∈[-π,π),dj表示第j个方位的mdsc,min表示取最小值。(25)式的含义是,将所有的备选方向扩展参数和备选风向值分别代入(25)式等号左边的求和式,把求和式取最小值时的备选风向值作为风向的反演结果。由此可见,最小二乘法在反演风向的同时消除了风向模糊,得到了唯一风向值,即把步骤6和步骤7同时完成。
[0134]
2、实验结果
[0135]
图3显示了基于mdsc的岸基超高频雷达风向反演方法的实验结果。从图3(a)和(b)可以看到,在大部分时间里,雷达反演风向与浮标接近,尤其是在8号、26~27号,风向发生剧烈变化,雷达与浮标测量结果表现了良好的一致性。在其它时间,风向变化较为平稳,此时基于双曲正割形式的方向扩展函数的结果的误差要大于基于余弦形式的方向扩展函数的结果。
[0136]
图3(c)和(d)中的对角线是数据一致性的参考线。可以看到,,大部分数据点都集中在对角线附近,远离对角线的点大多对应于较低风速。由于风速较低时空气流动不稳定,布拉格谐振海浪的运动方向与风向有较大偏差,导致低风速下误差较大。
[0137]
表1不同风速下的反演误差与数据点个数
[0138][0139]
为了说明基于mdsc的风向反演方法的优势,表1列出了不同风速下,基于bppr和基于mdsc的风向反演方法的误差,斜线左边是平均误差,,斜线右边是均方根误差,u表示风速(单位:米/秒)。表1还列出了不同风速下,对于同一批实验数据,两种方法可用的数据点个数,即可以计算得到的bppr值和mdsc值的个数。可以看到,风速小于3米/秒时,基于bppr的方法误差小于基于mdsc的方法,两者的数据点个数接近。风速大于3米/秒小于10米/秒时,基于bppr的方法误差大于基于mdsc的方法,前者的数据点个数明显小于后者。风速大于10米/秒时,基于bppr的方法误差显著大于基于mdsc的方法,前者数据点个数只有后者的一半。由此可见,在高风速下,基于mdsc的方法可以获取更多的数据点,反演误差远小于基于bppr的方法。
[0140]
图4进一步说明了基于mdsc的风向反演方法的优势。从图4可以看出,bppr值缺失主要发生于较高风速情况,此时基于bppr的风向反演方法失效。mdsc值在整个实验期间都是可以计算得到的,因此基于mdsc的风向方法始终有效。
[0141]
综上所述,基于mdsc的风向反演方法在较高风速下依然适用,,可以弥补基于bppr的方法在高风速下失效的缺陷。
[0142]
具体实施时,本发明技术方案提出的方法可由本领域技术人员采用计算机软件技术实现自动运行流程,实现方法的系统装置例如存储本发明技术方案相应计算机程序的计算机可读存储介质以及包括运行相应计算机程序的计算机设备,也应当在本发明的保护范围内。
[0143]
在一些可能的实施例中,提供一种岸基超高频雷达风向反演系统,包括处理器和存储器,存储器用于存储程序指令,处理器用于调用存储器中的存储指令执行如上所述的一种岸基超高频雷达风向反演方法。
[0144]
在一些可能的实施例中,提供一种岸基超高频雷达风向反演系统,包括可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序执行时,实现如上所述的一种岸基超高频雷达风向反演方法。
[0145]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。