技术特征:
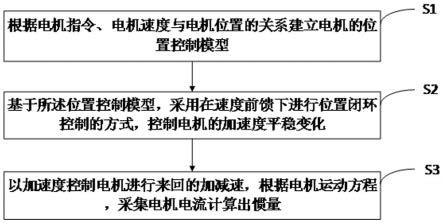
1.一种电机的转动惯量辨识方法,其特征在于,所述方法包括下述顺序步骤:s1.根据电机指令、电机速度与电机位置的关系建立电机的位置控制模型;s2.基于所述位置控制模型,采用在速度前馈下进行位置闭环控制的方式,控制电机的加速度平稳变化;s3.以所述加速度控制电机进行来回的加减速,根据电机运动方程,采集电机电流计算出转动惯量。2.如权利要求1所述的方法,其特征在于,所述步骤s3包括以下顺序步骤:s31.在开始辨识时设置电机运行的初始加速度小于等于最大加速度十分之一;s32.控制电机进行来回的加减速,以加减速过程中实时记录的电机q轴电流计算出电机的实时转动惯量;s33.将所述实时转动惯量除以电机惯量得到转动惯量比,代入位置环和速度环的pid控制参数中;s34.增加电机运行时的加速度;s35.判断实时加速度是否大于所述最大加速度,若不大于,则回到所述步骤s32继续执行辨识;若大于,则停止辨识,将最后计算得到的实时转动惯量作为最终辨识到的转动惯量。3.如权利要求2所述的方法,其特征在于,所述初始加速度设置为100rpm/s;所述最大加速度的设置为1000rpm/s;所述步骤s34中加速度的增幅为100 rpm/s。4.如权利要求1所述的方法,其特征在于,所述步骤s1的位置控制模型包括:位置环控制模块、速度环控制模块、积分模块和速度前馈模块;所述位置环控制模块输入位置指令与前一段时间的电机位置的差值作为速度指令,输出给所述速度环控制模块;所述速度前馈模块根据所述位置指令输出比例参数对所述位置环控制模块输出的速度指令进行调整,使得加速度平稳变化;所述速度环控制模块执行调整后的速度指令,输出实时的电机速度给所述积分模块;所述积分模块将所述实时的电机速度处理为实时的电机位置反馈给所述位置环控制模块。5.如权利要求3所述的方法,其特征在于,所述电机运动方程为:;其中,为转动惯量,为电机机械转速,为电磁转矩,为负载转矩,t为时间。6.如权利要求5所述的方法,其特征在于,所述步骤s32的具体过程包括:s321.在位置a点到位置b点间,进行加速度固定的匀加速运行,对此阶段的所述电机q轴电流进行积分后乘以转矩常数,获得加速阶段电磁转矩的积分:其中,为加速阶段所需的时间;s322.在与位置a点到位置b点同等长度的位置b点到位置c点间,进行加速度固定的匀减速运动,对此阶段的电机的q轴电流进行积分后乘以转矩常数,即获得减速阶段电磁
转矩的积分:;其中,为减速阶段所需的时间;s323.通过前两步获得的数值,令a点到c点间的速度最大值为,在这一次匀加速匀减速后,进行运算得到电机的转动惯量为:。7.一种采用如权利要求1-6任意一项所述方法的电机的转动惯量辨识装置,其特征在于,所述装置包括:速度前馈位置控制模块,采用速度前馈下位置控制的数学模型,使得位置控制模式下能让伺服电机的速度运行更加贴近均匀加减速;加速度规划模块,在惯量辨识过程中调整惯量的自动优化来获得更准确的辨识值;避免初始惯量不匹配;惯量辨识模块,通过电机运动方程来计算伺服控制中伺服电机的转动惯量。8.如权利要求7所述的装置,其特征在于,还包括:监控速度振动模块,与所述惯量辨识模块连接,在监控到所述伺服电机的速度振动超过限制值时,停止惯量辨识并报错。9.一种存储介质,其特征在于,所述存储介质存储有能够实现权利要求1至6中任意一项所述的电机的转动惯量辨识方法的程序文件。10.一种处理器,其特征在于,所述处理器用于运行程序,其中,所述程序运行时执行权利要求1至6中任意一项所述的电机的转动惯量辨识方法。
技术总结
本申请适用电机控制技术领域,提供了一种电机的转动惯量辨识方法及采用该方法的装置,本申请的辨识方法为了在位置控制模式下仍然能让电机的速度运行更加贴近均匀加减速,采用了速度前馈下位置控制的数学模型。通过速度前馈模块根据位置指令输出比例参数对位置环控制模块输出的速度指令进行调整。从而使位置控制的加速度控制也能均匀平滑的加减速,以符合离线惯量辨识的运动计算公式的要求,提高辨识结果的准确性。采用该方法的装置、存储介质和执行该方法的处理器也同样具有上述技术效果。执行该方法的处理器也同样具有上述技术效果。执行该方法的处理器也同样具有上述技术效果。
技术研发人员:邓锦祥 徐潇 罗凌云 矫日华
受保护的技术使用者:季华实验室
技术研发日:2022.11.08
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。