1.本发明属于无人机航迹规划技术领域,具体涉及一种基于改进人工蜂群算法的无人机路径规划方法及系统。
背景技术:
2.近年来随着无人机被广泛应用于军事打击、地质勘测、电力巡检等领域,高性能无人机的研制成为许多国家关注的焦点。无人机航迹规划是无人机任务分配中的核心问题之一,具体是指无人机在特定环境下结合自身性能,由当前位置快速规划出一条能够安全到达目标区域的最优航线。随着现代化技术日趋复杂,传统的无人机航迹规划方法已不能满足无人机飞行任务的实际需求,制定一个可靠而有效的航迹规划方法,已成为无人机高效完成飞行任务的瓶颈。自主航行能力的实现依靠无人机对环境的精确感知,尤其在高速航行时,现有无人机对周围航行环境的感知无法满足自主航行实时性和准确性的要求。
3.国内外许多学者将群智能算法应用于无人机航迹规划,例如,盖文东等提出了改进樽海鞘算法的无人机航迹规划方法(盖文东,曲承志,钟麦英,孙成贤,张婧.一种基于改进樽海鞘算法的无人机航迹规划方法[p].山东省:cn108919641b,2021-02-09.);高敬鹏等提出了一种基于飞鱼算法的无人机航迹规划方法(薛建凯,沈波,陈红委,渠博岗,洪佳乐,马宇航.一种基于麻雀搜索算法的无人机航迹规划方法[p].上海市:cn114485665a,2022-05-13.)。
[0004]
根据目前的研究成果来看,智能优化算法是一种有效的无人机路径规划方法。人工蜂群算法是一种模拟蜜蜂觅食行为的新型智能优化算法,可以应用于无人机路径规划。但是,人工蜂群算法存仍然存在有一些缺陷,如局部搜索能力较弱、易陷入局部最优。在进行无人机路径规划时,往往达不到理想的路径规划效果。
技术实现要素:
[0005]
本发明针对上述的不足之处提供一种提高算法收敛速度、算法鲁棒性的基于改进人工蜂群算法的无人机路径规划方法及系统。
[0006]
本发明目的是这样实现的:一种基于改进人工蜂群算法的无人机路径规划方法,其特征在于:所述该方法包括:
[0007]
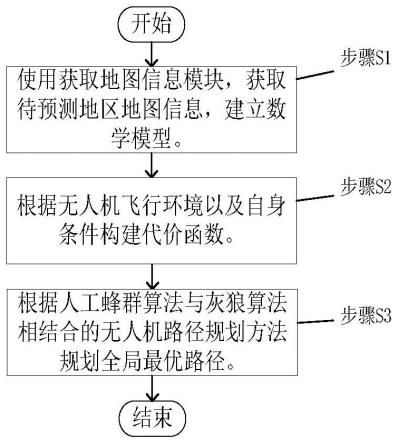
s1:使用获取地图信息模块,获取待预测地区地图信息,建立数学模型;
[0008]
s2:根据无人机飞行环境以及自身条件构建代价函数;
[0009]
s3:根据人工蜂群算法与灰狼算法相结合的无人机路径规划方法规划全局最优路径。
[0010]
优选的,所述s1使用获取地图信息模块,获取待预测地区地图信息;所述获取待预测地区地图信息包括获取待预测地区威胁点的位置、个数,并评估其威胁等级;使用不同半径和威胁权重的圆圈描述不同类别的威胁;
[0011]
无人机受威胁坠毁的概率与距离威胁点圆心的距离成正比,如果无人机在威胁区
域外,则坠毁概率为0;已知s为起点、t为终点,之间遍布威胁度不等的威胁点,规划出的航迹从s点出发尽量避开威胁区域成功到达d点,且距离要短。
[0012]
优选的,所述s1中建立数学模型通过新坐标系描述无人机航行环境;
[0013]
新坐标系的原点与s点重合,连接s点与t点形成直线st,st与y轴的夹角为θ,新坐标系的x轴与st重合,过s点构造一条垂直st的直线作为新坐标系的y轴,新坐标系记为x’o’y’;
[0014]
某点在原坐标系的坐标为(x,y),通过式(1)、(2)完成转化,其在新坐标系下的坐标为(x’,y’);
[0015][0016][0017]
完成坐标转换后,把线段st分成d 2等份,过每个分段点作垂线lk垂直于st,在每条垂线上任意选取一离散点,将d 2个离散点{s,l1(x(1),y(1)),l2(x(2),y(2)),
…
,ld(x(d),y(d)),t}按顺序相连构成航迹,将无人机航迹规划问题转换成d 2维函数优化问题。
[0018]
优选的,所述s2中根据无人机飞行环境以及自身条件构建代价函数,将相邻两个航迹点连成的线段等分成若干份,并采用近似的方法,构建适应度函数。
[0019]
优选的,所述将相邻两个航迹点连成的线段等分成若干份,并采用近似的方法,构建适应度函数具有操作步骤如下:
[0020]
s2-1:将相邻两个航迹点连成的线段等分成10份,取奇数等分点计算该段航迹的威胁代价ω
threat
;若该点处于威胁点影响的范围内,则威胁代价ω
threat
可由式(3)得到,若该点不在威胁点影响范围内,则ω
threat
=0;
[0021][0022]
式中:length
i 1
为航迹点li到l
i 1
之间的距离;tk为第k个威胁区域对无人机的威胁等级;n
t
为任务环境中威胁区域的数量;d
0,1,k
为第i 1段航迹的1/10点到第k个威胁区域中心的距离;
[0023]
s2-2:根据式(4)计算无人机航迹威胁代价函数j
threat
;
[0024][0025]
式中:length为生成航迹的总长度;ω
threat
为航迹上的威胁代价;
[0026]
s2-3:根据式(5)计算无人机航迹油耗代价函数j
fuel
;
[0027][0028]
式中:ω
fuel
为航迹上的油耗代价;
[0029]
s2-4:根据上式求得的j
threat
与j
fuel
,可得目标函数计算公式为:
[0030]
j=λ
·jthreat
(1-λ)
·jfuel
ꢀꢀ
(6)
[0031]
式中,λ为0到1之间的常数ω
fuel
=1;
[0032]
s2-5:通过目标函数,可以计算得到适应度函数为:
[0033][0034]
式中,fiti是第i个解的适应度值;ji是第i个解的目标函数值。
[0035]
优选的,所述s3中根据人工蜂群算法与灰狼算法相结合的无人机路径规划方法规划全局最优路径,具体包括以下步骤:
[0036]
s3-1:初始化相关参数,并在d维空间随机生成sn条航迹;
[0037]
s3-2:将蜜源(航迹)按一定比例随机分为蜜源1和蜜源2;根据式(8)随机生成蜜源:
[0038][0039]
式中:x
ij
对应第i个蜜源,第j维的变量;i取值于{1,2,
…
,d},d为蜜源的维度;j取值于{1,2,
…
,sn},sn为蜜源个数;根据式(7)计算适应度将蜜源(航迹)按一定比例分为蜜源1和蜜源2;
[0040]
s3-3:蜜源1在采蜜蜂阶段采用式(9)进行开采:
[0041][0042]
式中:vij为产生的新蜜源;k为随机产生的整数,k取值于{1,2,
…
,sn},且k≠i;为[-1,1]内的随机数;
[0043]
s3-4:蜜源2在采蜜蜂阶段采用式(10)进行开采:
[0044][0045]
式中:α为[0,a]中均匀分布的随机变量;通过实验发现a取1.5时效果最好;β=n(0.3,0.3)
×
rand(0,1),xbest为适应度值前10%的个体中的某一个体;
[0046]
s3-5:根据基于动态评价策略的改进轮盘赌选择方法计算观察蜂跟随概率,通过对蜜源的质量与开发潜力进行打分,综合判定蜜源被选择的概率;一般认为蜜源的适应度值越大蜜源的质量越好;蜜源被连续优化次数越多开发潜力越大;开发潜力得分按式(11)进行计算:
[0047][0048][0049][0050]
式中:num1(i)为第i个蜜源连续被优化次数;num2(i)为第i个蜜源连续未被优化次数。蜜源i被优化时num1(i)按式(12)计算,num2(i)为0;蜜源i未被优化时,num1(i)为0,num2(i)按式(13)计算;
[0051]
蜜源质量得分按式(14)计算:
[0052][0053]
式中:fi为蜜源的适应度值;
[0054]
综合评价得分按式(15)计算:
[0055]
s(i)=μ1·sopt(i)*
μ2·sfit(i)*
ꢀꢀ
(15)
[0056][0057][0058]
式中:μ1和μ2为权重系数;s
opt(i)*
和s
fit(i)*
为s
opt
(i)和s
fit
(i)按式(16)和式(17)归一化处理得到的数据;
[0059]
通过式(18)计算选择概率:
[0060][0061]
式中,s(i)表示第i个蜜源的综合得分;
[0062]
s3-6:蜜源1在跟随蜂阶段融合gwo算法思想,采用改进的gwo算法搜索公式进行搜索;原始gwo搜索公式,向量c1、c2、c3、a1、a2、a3在每一维上均为独立产生数值,使用c1、c2、c3、a1、a2、a3代替原有向量参数,即采用式(19)-(25)进行开采:
[0063]dα
=|c1·
x
α
(t)-x(t)|
ꢀꢀ
(19)
[0064]dβ
=|c2·
x
β
(t)-x(t)|
ꢀꢀ
(20)
[0065]dδ
=|c3·
x
δ
(t)-x(t)|
ꢀꢀ
(21)
[0066]
x1=x
α
(t)-a1·dα
ꢀꢀ
(22)
[0067]
x2=x
β
(t)-a2·dβ
ꢀꢀ
(23)
[0068]
x3=x
δ
(t)-a3·dδ
ꢀꢀ
(24)
[0069]
x
(t 1)
=(x1 x2 x3)/3
ꢀꢀ
(25)
[0070]
式中:t表示当前迭代次数;x
p
(t)为猎物的位置;x(t)表示灰狼个体当前位置;x(t 1)表示x(t)下一时刻的更新位置;d
α
、d
β
、d
δ
表示x与α狼、β狼、δ狼之间的距离;ak=2ar
k1-a,ck=2r
k2
,其中a是从2到0线性递减的算法参数,r
k1
和r
k2
是[0,1]上均匀分布随机数,k=1
,2,
3;
[0071]
蜜源2采用式(26)进行开采:
[0072][0073]
式中:α为[0,a]中均匀分布的随机变量;x
ebest
为适应度前10%的个体中的某一个体,通过实验发现a取1.5时效果最好;β=n(0.3,0.3)
×
rand(0,1),x
r1j
表示第r1个解的第j维,x
r2j
表示第r2个解的第j维;
[0074]
s3-7:选取适应度前10%的蜜源进行柯西变异操作,柯西分布数学模型如式(27)
所示:
[0075][0076]
根据柯西数学模型进行变异操作,如式(28)所示
[0077]
x
ij
=x
ij
x
ij
·
cauchy(0,1)
ꢀꢀ
(28)
[0078]
式中:x
ij
为第i个解的第j维。
[0079]
一种基于改进人工蜂群算法的无人机路径规划系统,所述该系统包括:
[0080]
获取地图信息模块,用于获取待预测地区地图;
[0081]
获取初始化位置模块,用于获取无人机起始点位置信息与目标点位置信息;
[0082]
建立求解模型模块,用于根据地图信息设置约束条件,以及根据待遇测地区威胁点信息以及起始点与终点位置信息构建威胁代价函数以及油耗代价函数,并将威胁代价与油耗代价的加权和作为无人机路径规划的目标函数;根据约束条件与无人机路径规划目标函数构建求解模型模块;
[0083]
获取最优路径模块,根据人工蜂群算法与灰狼算法相结合的无人机路径规划方法对所述求解模型进行寻优,以此得到最优路径。
[0084]
本发明的有益效果:1、通过在观察蜂阶段融入了改进灰狼算法,加强了局部搜索能力,提高了算法收敛速度;提出精英个体概念,当前个体通过与精英个体交互产生新解;算法初期,精英个体在搜索空间中分布较为分散,有利于全局搜索,随着迭代次数增加,精英个体逐渐聚拢,在搜索空间中分布较为集中,有利于局部搜索;通过精英个体引导搜索,有效平衡了算法的探索与开发能力,提高了算法收敛精度。
[0085]
2、通过对蜜源的质量与开发潜力进行打分,综合判定蜜源被选择的概率,保证了种群的多样性,提高了算法的鲁棒性;选取适应度前10%的蜜源进行柯西变异操作,有利于算法跳出局部最优。变异结束后贪婪判断该蜜源是否更新,进一步提高了算法的收敛速度。
附图说明
[0086]
图1为本发明的方法流程图。
[0087]
图2为人工蜂群算法流程图。
[0088]
图3为航迹规划模型图。
[0089]
图4为各算法规划航迹对比图。
[0090]
图5为各算法适应度平均值收敛曲线对比图。
具体实施方式
[0091]
下面结合附图对本发明进一步阐述。
[0092]
一种基于改进人工蜂群算法的无人机路径规划方法,包括以下步骤:
[0093]
s1:使用获取地图信息模块,获取待预测地区地图信息,建立数学模型;
[0094]
具体操作如下:首先根据获取地图信息模块,获取待预测地区地图信息中待预测地区威胁点的位置、个数,并评估其威胁等级;使用不同半径和威胁权重的圆圈描述不同类别的威胁。
[0095]
无人机受威胁坠毁的概率与距离威胁点圆心的距离成正比,如果无人机在威胁区
域外,则坠毁概率为0。已知s为起点、t为终点,之间遍布威胁度不等的威胁点。要求规划出的航迹从s点出发尽量避开威胁区域成功到达d点,且距离尽可能短。
[0096]
使用新坐标系描述无人机航行环境。新坐标系的原点与s点重合,连接s点与t点形成直线st,st与y轴的夹角为θ,新坐标系的x轴与st重合,过s点构造一条垂直st的直线作为新坐标系的y轴,新坐标系记为x
′
o’y’。某点在原坐标系的坐标为(x,y),可以通过式(1)、(2)完成转化,其在新坐标系下的坐标为(x
′
,y
′
);
[0097][0098][0099]
完成坐标转换后,把线段st分成d 2等份,过每个分段点作垂线lk垂直于st,在每条垂线上任意选取一离散点,将d 2个离散点{s,l1(x(1),y(1)),l2(x(2),y(2)),
…
,ld(x(d),y(d)),t}按顺序相连构成航迹,以此将无人机航迹规划问题转换成d 2维函数优化问题。
[0100]
s2:根据无人机飞行环境以及自身条件构建代价函数;
[0101]
具体操作如下:s2-1:根据无人机飞行环境以及自身条件构建代价函数,将相邻两个航迹点连成的线段等分成10份,取奇数等分点计算该段航迹的威胁代价ω
threat
。若该点处于威胁点影响的范围内,则威胁代价ω
threat
可由式(3)得到,若该点不在威胁点影响范围内则ω
threat
=0。
[0102][0103]
式中:length
i 1
为航迹点li到l
i 1
之间的距离;tk为第k个威胁区域对无人机的威胁等级;n
t
为任务环境中威胁区域的数量;d
0,1,k
为第i 1段航迹的1/10点到第k个威胁区域中心的距离。
[0104]
s2-2:根据式(4)计算无人机航迹威胁代价函数j
threat
;
[0105][0106]
式中:length为生成航迹的总长度;ω
threat
为航迹上的威胁代价。
[0107]
式中:length为生成航迹的总长度;ω
threat
为航迹上的威胁代价;
[0108]
s2-3:根据式(5)计算无人机航迹油耗代价函数j
fuel
;
[0109][0110]
式中:ω
fuel
为航迹上的油耗代价;
[0111]
s2-4:根据上式求得的j
threat
与j
fuel
,可得目标函数计算公式为:
[0112]
j=λ
·jthreat
(1-λ)
·jfuel
ꢀꢀ
(6)
[0113]
式中,λ为0到1之间的常数ω
fuel
=1;
(i)按式(13)计算;
[0133]
蜜源质量得分按式(14)计算:
[0134][0135]
式中:fi为蜜源的适应度值;
[0136]
综合评价得分按式(15)计算:
[0137]
s(i)=μ1·sopt(i)*
μ2·sfit(i)*
ꢀꢀ
(15)
[0138][0139][0140]
式中:μ1和μ2为权重系数;s
opt(i)*
和s
fit(i)*
为s
opt
(i)和s
fit
(i)按式(16)和式(17)归一化处理得到的数据;
[0141]
通过式(18)计算选择概率:
[0142][0143]
式中,s(i)表示第i个蜜源的综合得分。
[0144]
s3-6:蜜源1在跟随蜂阶段融合gwo算法思想,采用改进的gwo算法搜索公式进行搜索;原始gwo搜索公式,向量c1、c2、c3、a1、a2、a3在每一维上均为独立产生数值,使用c1、c2、c3、a1、a2、a3代替原有向量参数,即采用式(19)-(25)进行开采:
[0145]dα
=|c1·
x
α
(t)-x(t)|
ꢀꢀ
(19)
[0146]dβ
=|c2·
x
β
(t)-x(t)|
ꢀꢀ
(20)
[0147]dδ
=|c3·
x
δ
(t)-x(t)|
ꢀꢀ
(21)
[0148]
x1=x
α
(t)-a1·dα
ꢀꢀ
(22)
[0149]
x2=x
β
(t)-a2·dβ
ꢀꢀ
(23)
[0150]
x3=x
δ
(t)-a3·dδ
ꢀꢀ
(24)
[0151]
x
(t 1)
=(x1 x2 x3)/3
ꢀꢀ
(25)
[0152]
式中:t表示当前迭代次数;x
p
(t)为猎物的位置;x(t)表示灰狼个体当前位置;x(t 1)表示x(t)下一时刻的更新位置;d
α
、d
β
、d
δ
表示x与α狼、β狼、δ狼之间的距离;ak=2ar
k1-a,ck=2r
k2
,其中a是从2到0线性递减的算法参数,r
k1
和r
k2
是[0,1]上均匀分布随机数,k=1,2,3;
[0153]
密源2采用式(26)进行开采:
[0154][0155]
式中:α为[0,a]中均匀分布的随机变量;x
ebest
为适应度前10%的个体中的某一个体,通过实验发现a取1.5时效果最好;β=n(0.3,0.3)
×
rand(0,1),x
r1j
表示第r1个解的第j维,x
r2j
表示第r2个解的第j维。
[0156]
s3-7:选取适应度前10%的蜜源进行柯西变异操作,柯西分布数学模型如式(27)所示:
[0157][0158]
根据柯西数学模型进行变异操作,如式(28)所示
[0159]
x
ij
=x
ij
x
ij
·
cauchy(0,1)
ꢀꢀ
(28)
[0160]
式中:xij为第i个解的第j维。
[0161]
s3-8:找到当前最优解,并判断循环次数是否达到最大循环次数maxcycle,如果达到则输出最优解,如果没有达到则返回s3-2继续进行循环操作。最优解通过坐标反变换,得到连接从起点s到终点t绕过所有障碍物的最佳路径。
[0162]
本实施例中,以matlab为仿真平台,建立无人机航迹规划环境。以s2所得适应度值为目标,对abc方法和gwoabc方法进行分析。具体参数为蜜源数量(sn)为30,蜂群数量(np)为60,最大迭代次数500,搜索范围为-50≤x
ij
≤50,维数为20,阈值limit设置为20。
[0163]
如图4所示,起点坐标为(10,10),终点坐标为(90,90),星号和正方形图标分别代表起点和终点,圆圈表示障碍物;从图4可知,abc算法规划出的航迹质量较差且与威胁点存在一定程度的碰撞;beabc算法规划出的航迹能很好的避开威胁点,但是不够平滑,eabc算法规划出的航迹较为平滑且航迹距离较短,但仍然不是最优路径,与上述算法相比,gwoabc算法规划的航迹最优。
[0164]
表1为各算法对比数据表
[0165]
算法算法平均耗时平均收敛代数收敛值均值收敛值方差abc6.59272060.01442.03
×
10-7
beabc5.69642750.01495.57
×
10-7
eabc6.75312360.01526.02
×
10-7
gwoabc7.01901660.01564.20
×
10-8
[0166]
分析表1,在参与实验的四种算法中gwoabc算法虽然算法平均耗时略长,但是收敛值均值却是最佳的,并且较另外三种算法abc、beabc、eabc相比,gwoabc算法平均收敛代数分别降低了19.42%、39.64%、29.66%,收敛值方差分别降低了79.31%、92.46%、93.02%;通过实验分析对比,gwoabc算法收敛速度较快,收敛精度较高,且较为稳定,鲁棒性强。而传统abc算法则陷入了局部最优的情况。仿真结果表明,相同环境下,gwoabc算法平衡了算法的局部搜索与全局开发能力,获得了从起始点到终点的最优路径,证明了算法的有效性。
[0167]
一种基于改进人工蜂群算法的无人机路径规划系统,包括:获取地图信息模块,用于获取待预测地区地图;
[0168]
获取初始化位置模块,用于获取无人机起始点位置信息与目标点位置信息;
[0169]
建立求解模型模块,用于根据地图信息设置约束条件,以及根据待遇测地区威胁点信息以及起始点与终点位置信息构建威胁代价函数以及油耗代价函数,并将威胁代价与油耗代价的加权和作为无人机路径规划的目标函数;根据约束条件与无人机路径规划目标函数构建求解模型模块;
[0170]
获取最优路径模块,根据人工蜂群算法与灰狼算法相结合的无人机路径规划方法
对所述求解模型进行寻优,以此得到最优路径。
[0171]
以上所述仅为本发明的实施方式而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理内所作的任何修改、等同替换、改进等,均应包括在本发明的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。